1. Introduction
Synthetic aperture radar (SAR) and inverse SAR (ISAR), which have all-time and all-weather active imaging abilities, play important roles in the civil and military fields, and their echo signals’ processing has always been a research focus and hotspot. The echo of maneuvering targets, such as ships, aircraft, and space debris, can be expressed as a multicomponent polynomial phase signal (mc-PPS) [
1,
2,
3]. Especially with the improvement of radar resolution and increases of the synthetic period, there arise new influences from two aspects: First, the number of signal components is increased with more resolvable scattering elements, while the component extraction is more difficult and easily interfered with by noises as the energy of each single component is reduced relatively. Second, more complex changes in target gesture lead to a higher polynomial order in the echo phase and inconsistent scattering characteristics. Furthermore, caused by the latter effect, the signal component would appear and vanish in the synthetic aperture time rather than accompanying the sample’s beginning and end [
4].
Under these circumstances, the classical time frequency (TF) analysis method cannot satisfy the processing requirements of mc-PPS. To process mc-PPS effectively, two methods are popularly adopted. The first is polynomial phase transformation (PPT) [
5], whether discrete polynomial phase transformation (DPT) [
6], high-order ambiguity function (HAF) [
7], cubic phase function (CPF) [
8], and so forth, all of which can reduce the phase order based on phase differentiation (PD) and reduce the searching space to one dimension. These methods are influenced by the cross terms and their resolutions are limited by the PD process. Although many modified methods have been proposed to reduce the cross terms, such as the product forms of HAF (PAHF) [
9] and CPF (PCPF) [
10], these methods are also influenced by the cross terms of the mc-PPS, especially when numerous components are contained and the intensities of every component are similar. The PPT methods are reviewed in detail in [
11].
The second is the maximum likelihood (ML) method, which can obtain the optimal solution via parameter estimation [
12]. However, the application of the ML method is limited because of its multidimensional searching space and very large computation requirements. A modified quasi-ML (QML) method [
13] has been proposed, which offers several improvements and is widely applied in the PPS process. A detailed review of the QML method is presented in [
14]. The adaptive joint time frequency (AJTF) method, in the sense of being a modified ML method, is widely applied in ISAR imaging [
15], and when parameterized, can represent the signal by extracting the signal components piece-by-piece and offer good resolution without the influence of cross terms when processing high-order mc-PPS [
16]. Its improved version, the frequency domain extraction-based AJTF (FDE–AJTF) decomposition method, has been proposed [
1,
4], offering three improvements: estimation and extraction of the component in the frequency domain, the use of a time window on the basis function, and the adoption of CFAR detection in component extraction. These improvements increase the stability, speed, and accuracy of the components’ estimation and extraction, and can satisfy the above new features of the echo signal.
Similar to the other ML methods, the key procedure in the FDE–AJTF method is searching for the optimal parameters in the solution space, which is essentially a multidimensional optimization problem with different extremal solutions [
17]. Moreover, for the TF decomposition of a mc-PPS signal, some extremal solutions may be true value solutions corresponding to the signal components with different intensities, which makes the problem more complex.
The particle swarm optimization (PSO) is a swarm intelligence algorithm and has been applied in the classical AJTF method with good performance [
18]. The important feature of PSO is that every particle in the swarm has an overall moving tendency toward its local historical best position and the global historical best position. The feature makes it efficient and fast; however, when applied in the mc-PPS TF decomposition, it brings two influences: on one hand, the algorithm easily falls into the local optimal solution and enters the premature stagnation state, which reduces its global convergence ability; on the other hand, the different extremal solutions may be true components, and it makes the simultaneous extraction of several components possible, which can increase the decomposing efficiency.
In this paper, the PSO is applied in the FDE–AJTF decomposition, and a novel multicomponent PSO (mc-PSO) is proposed with the new characteristic that can extract several components simultaneously based on the feature of the standard PSO, in which the population is divided into three groups and the neighborhood of the best particle in the optimal group is set as the forbidden area for the suboptimal group, and then, two different independent components can be obtained and extracted in one extraction. By its new characteristic, the mc-PSO improves its decomposing efficiency and computing speed. Meanwhile, its convergence, accuracy, and global optimal ability are enhanced. To verify new characteristics of the mc-PSO, three simulation tests are carried out and compared with three classic optimal algorithms, i.e., standard PSO, genetic algorithm (GA) and differential evolution (DE) algorithms. According to the test results, the mc-PSO has the best performance among the four optimal algorithms.
3. mc-PSO
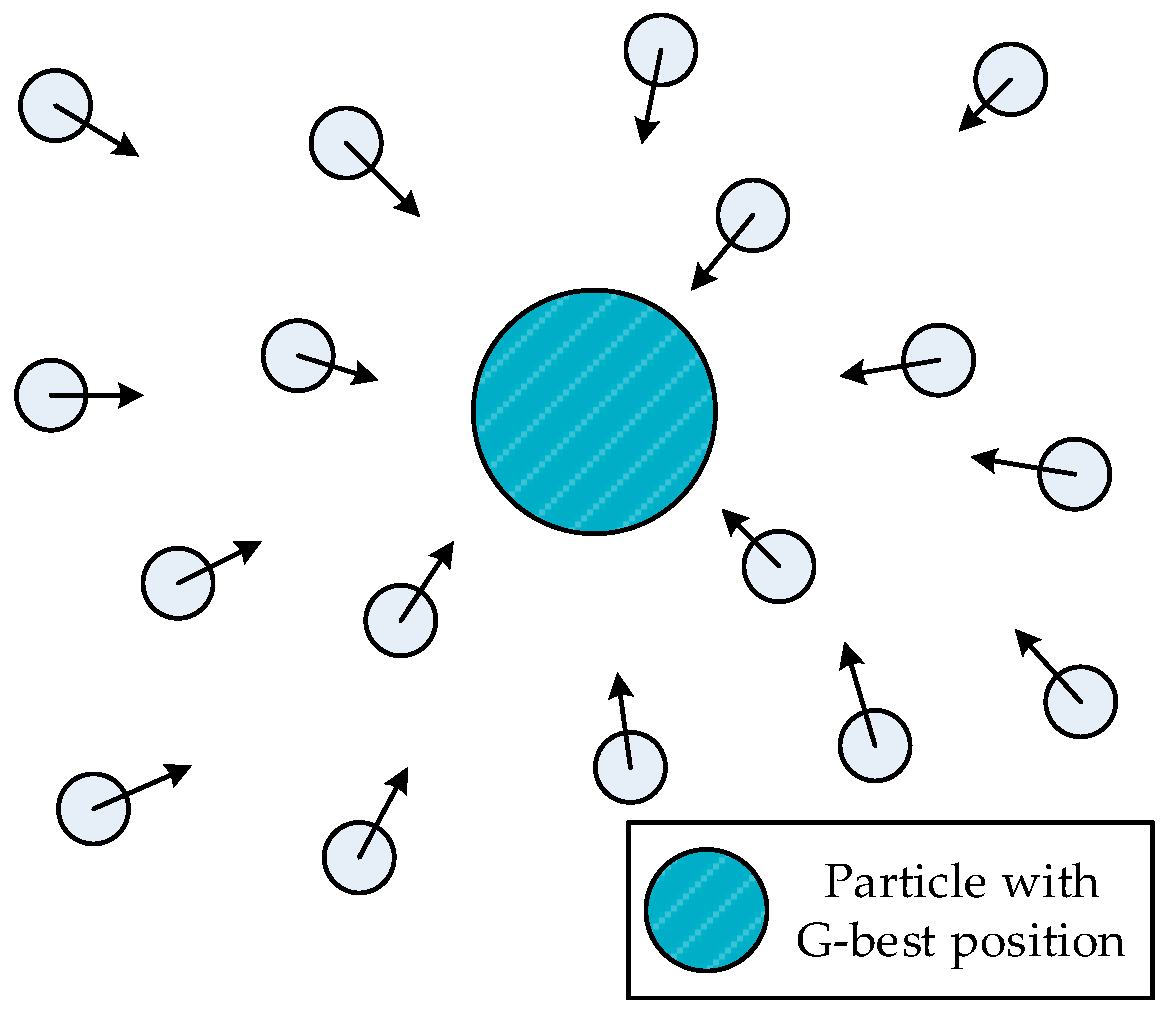
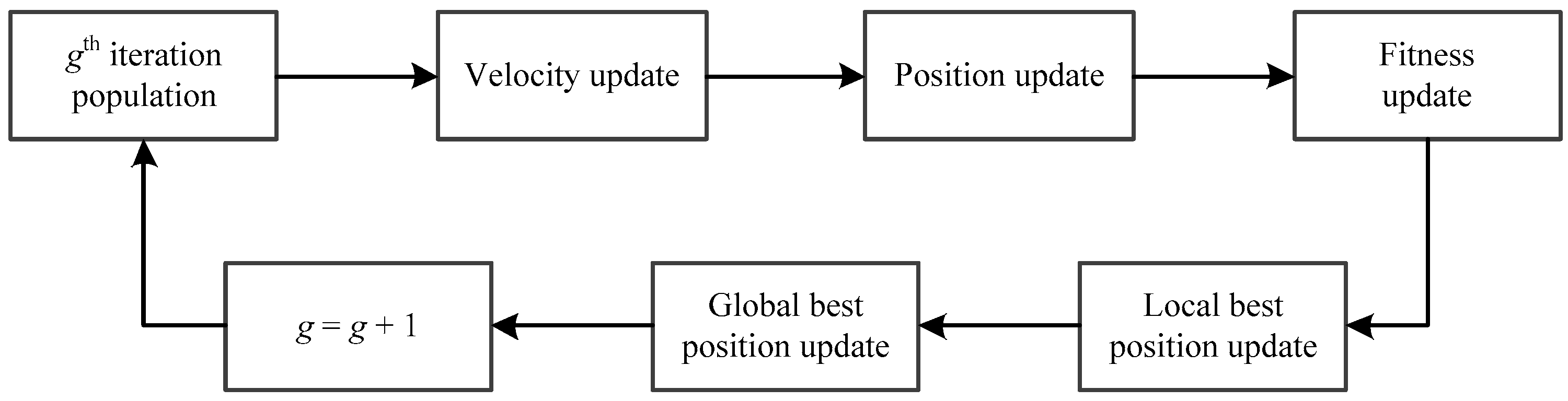
The PSO is a swarm intelligence algorithm and has been applied in the classical AJTF method with good performance. The important feature of the PSO is that every particle in the swarm has an overall tendency to move toward its L-best position and the G-best position. The feature makes it efficient and fast; however, when applied in the mc-PPS TF decomposition, it brings two influences: on one hand, the algorithm easily falls into the local optimal solution and enters the premature stagnation state, which reduces its global convergence ability; on the other hand, the different extremal solutions may be true components, and it makes extracting several components simultaneously possible, which can increase the decomposing efficiency.
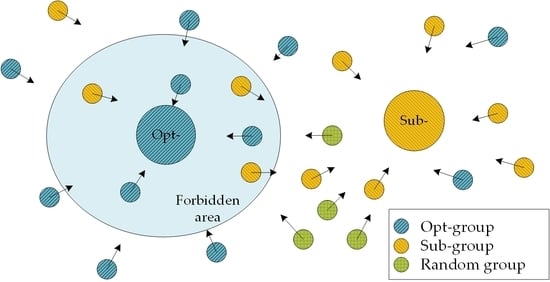
Since the components of the mc-PPS signal are independent of each other, extracting one component cannot affect the others. To combine the strong local convergence ability and the feature of reserving the suboptimal solution, a novel multicomponent PSO (mc-PSO) algorithm is proposed, in which the population is divided into an optimal group (Opt-group) and a suboptimal group (Sub-group), and several components can be extracted in one extraction. Furthermore, benefiting from the parallel computing ability of the PSO, the operation speed and efficiency of the modified algorithm are increased.
Based on the standard PSO shown in
Figure 1, the procedure of the mc-PSO is as shown in
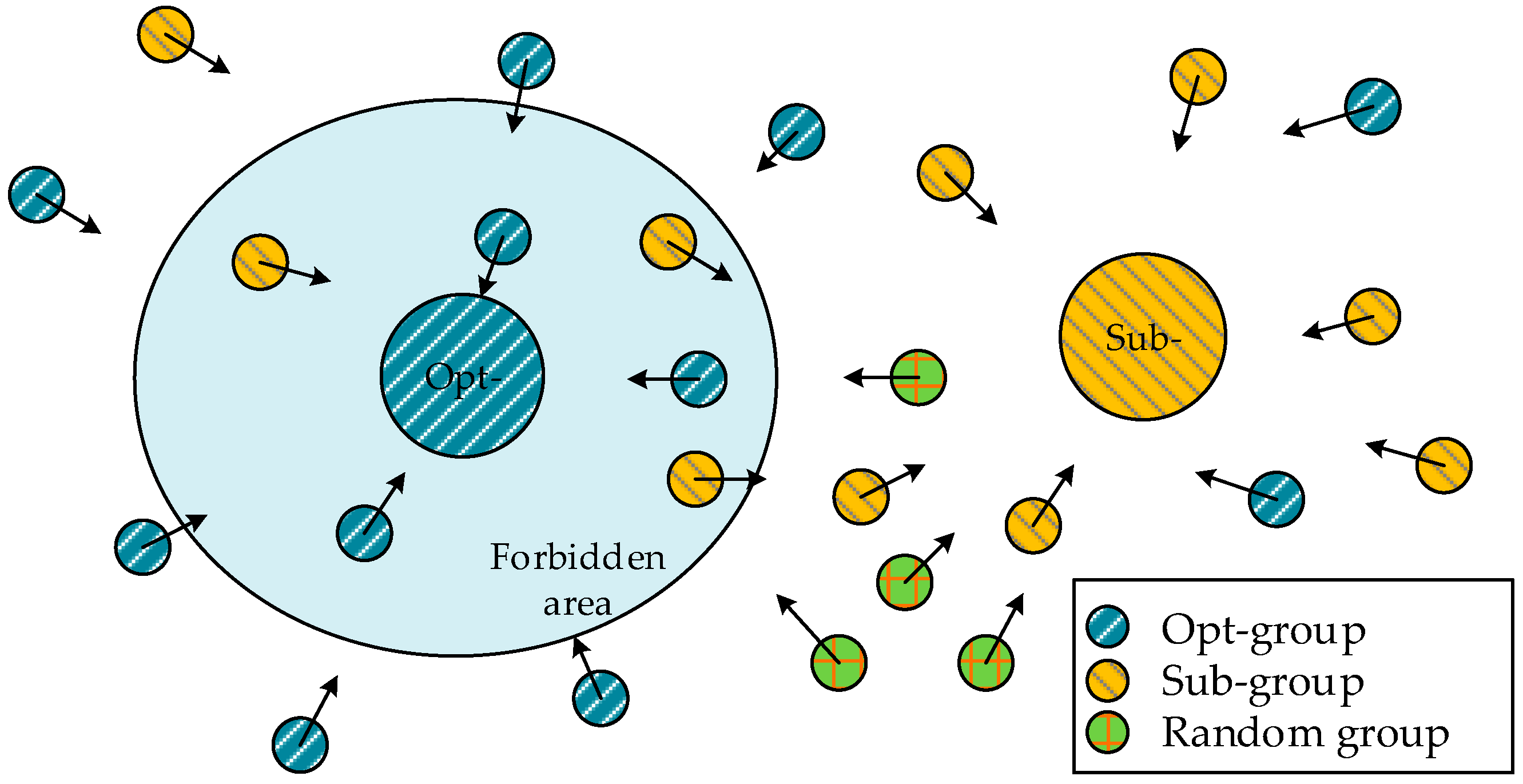
Figure 3, in which two components are extracted simultaneously.
As shown in
Figure 3, when two components are extracted simultaneously, the population of mc-PSO is divided into three constant groups. The first one is the Opt-group, shown as the blue circle, which contains the particle with the G-best position, and its neighborhood is the forbidden area to the Sub-group; the second one is the Sub-group, shown as the yellow circle, in which its G-best particle can be chosen only outside the forbidden area; the third one is the random group, shown as the green circle, which has no best particle and is updated following the optimal or suboptimal group.
3.1. The Features of Mc-PSO
The three groups of the mc-PSO have the following features:
● The independence of groups
The particles in the three groups are relatively fixed, and the particles in the Opt- and Sub-groups update their positions and velocities according to their own L- and G-best parameters to ensure their convergence in every iteration. The random group without a best particle is divided into two subgroups to update their parameters following the Opt- and Sub-groups, and once the fitness value of a particle is higher than the smallest one in the other two groups, the smallest one could be replaced by the higher one in the random group. Of course, the number of replaced particles is restricted to enhance the whole population’s randomness when exchanging the information among the three groups.
● The strength of the optimal group
Although the aim of mc-PSO is to extract several components simultaneously, the global and stable convergence of the algorithm is more important. The G-best particle in the Opt-group is the best one of the whole population, and its neighborhood is the area forbidden to the Sub-group’s G-best particle, while the particles in the Sub-group could achieve a position in the forbidden area, but their G-best particle must be chosen outside this area, by which means their parameters are subject to updating and searching for the suboptimal solutions only.
● The opportunity of the suboptimal group
If a particle in the Sub-group gets the G-best fitness of the whole population, the Sub- and the Opt-group are exchanged with each other, and in the next iteration, the Opt-group becomes the Sub-group, and vice versa.
● The limitation of the suboptimal group
When a particle of the Sub-group enters into the forbidden area, it may have a relatively high fitness value. However, its best result is only a repetition of the G-best solution in the Opt-group, unless its fitness is greater than the G-best particle and the two groups exchange with each other. Because of the forbidden area, the G-best particle in the Sub-group does not have the highest fitness of the whole population, while the other particles in the Sub-group are attracted to gather around the suboptimal solution.
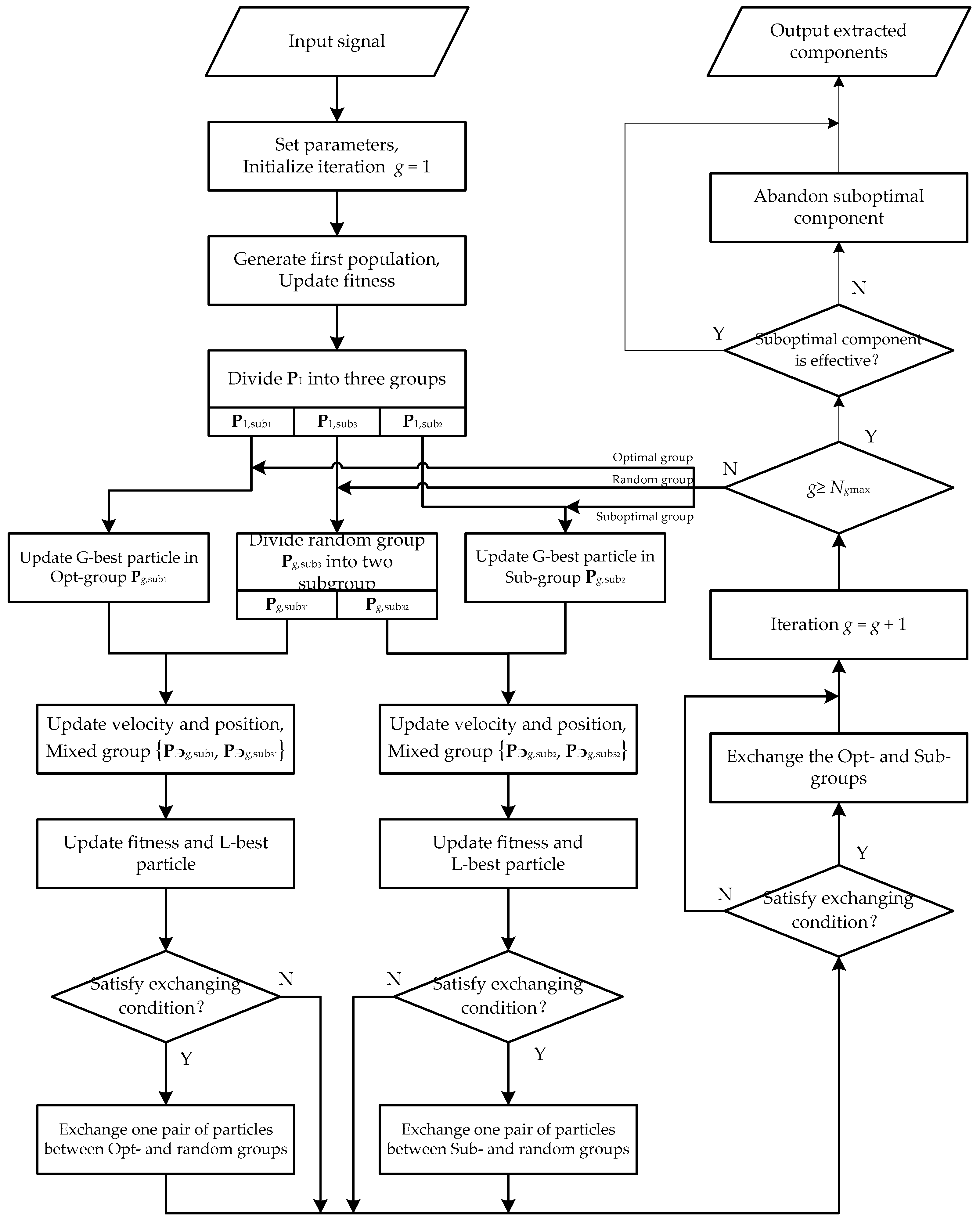
3.2. The Procedure of the Mc-PSO Algorithm
According to the TF decomposing process of mc-PPS, the searching parameters are the polynomial phase parameters over 2 orders, while the fitness is the maximum spectrum value of the phase-compensated signal, and the position of the maximum value, i.e.,
of the PPS is actually the azimuth position of the scattering center. Therefore, in the mc-PSO algorithm, the forbidden area of the optimal particle can be set based on the position of the scattering center, by which the Opt- and Sub-groups are distinguished. The procedure of the mc-PSO algorithm applied in FDE–AJTF decomposition is as shown in
Figure 4.
As shown in
Figure 4, the procedure is as follows:
- (a)
Set the neighborhood range of the forbidden area, , and initialize the first population and the iteration ;
- (b)
Divide the population into three groups, , where is the Opt-group, is the Sub-group, and is the random group.
- (c)
In the gth iteration, search for the G-best fitness value of the Opt-group, update the particle with the G-best position , search for the position of the responding scattering center, and set the neighborhood of as the forbidden area of the Sub-group.
- (d)
Search for the G-best fitness value
of the Sub-group, update the particle with the G-best position
, and search for the position
of the responding scattering center, while
is chosen only out of the neighborhood of
, as follows:
where
is the particle number in the Sub-group whose position is outside the forbidden area, and
conforms to the following equation:
where
is the neighborhood range.
- (e)
Set the L-best fitness of the particles of the Sub-group in the forbidden area
to zero, as follows:
where
is the particle number of the Sub-group in the forbidden area.
The parameters and the fitness of the particles in the forbidden area would definitely be updated and step out the forbidden area. The manipulation ensures the suboptimal group does not include the best solution of the Opt-group and thus avoids invalid searching.
- (f)
Divide the random group into two subgroups, , and attach to the end of the Opt- and Sub-groups, respectively, to compose two mixed groups and , and then update their parameters using and , respectively.
- (g)
Update the two mixed groups, and , calculate their fitness and the scattering position , and update their L-best value and position .
- (h)
In the first mixed group
, if the maximum fitness value in the random subgroup
is larger than the minimum fitness value in the Opt-group
, exchange the two respective particles as follows:
where the symbol
means exchanging the two particles’ groups;
is the particle number with the minimum fitness value in the Opt-group
; and
is the particle number with the maximum fitness value in the random subgroup
, as follows:
Then, apply the same processing to the second mixed group, .
Only one pair of particles are exchanged in each mixed group, the purpose of which is to maintain the relative independence of the Opt- and Sub-groups and to maintain the randomness of the random group.
- (i)
If the G-best fitness of the Sub-group is larger than that of the Opt-group, exchange the roles of the two groups, as follows:
where the symbol
means exchanging the two groups; and
and
are the particle numbers with maximum fitness in the Opt- and Sub-groups, respectively.
- (j)
The three groups become the (g + 1)th population, , and determine whether the stop condition is met; if it is, perform step (k), and if not, update the iteration and perform step (c).
- (k)
Output the G-best parameters and of the Opt- and Sub-groups, respectively, and the algorithm is completed.
3.3. The Effectiveness of Suboptimal Component
Two components are outputted for each completion of the mc-PSO algorithm. However, if only one efficient component is left in the signal, the second component is invalid, so the effectiveness of the suboptimal component should be judged. According to the feature of the mc-PPS signal, the two real components are independent to each other and one’s extraction cannot affect the other; otherwise, extracting a component would severely affect the fitness of the other.
Therefore, if the fitness of the optimal and suboptimal solutions are
and
, respectively, and the fitness of the suboptimal solution after the optimal component is extracted is
, the ratio of the two fitness values
and
before and after the optimal component is extracted can judge the effectiveness of the suboptimal solution, as follows:
where
is the fitness ratio and
is the threshold. If the suboptimal solution is not a real component, the fitness
would be obviously lower than
. To ensure the effectiveness of every component, the threshold can be set as
.
4. Simulation and Test
To analyze the convergence, accuracy, and computation of the mc-PSO, several simulations are performed and the comparisons between mc-PSO and GA, DE, and standard PSO are made. The simulated data is contained in four four-order PPS components with 500 points within the time −0.5~0.5 s, as
Table 1 shows.
The parameters of the four optimal algorithms are set as in
Table 2, in which the main variable is the number of individuals or particles, and the other parameters are optimal empirical values obtained after many simulation experiments.
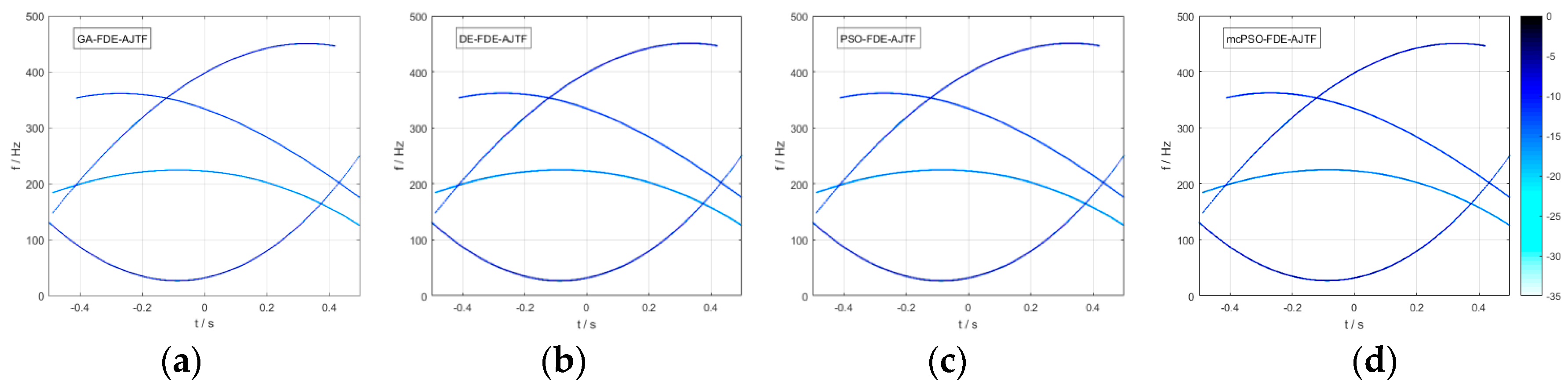
The time frequency distribution (TFD) of the simulated data obtained by short time Fourier transform (STFT) is shown in
Figure 5, and the time frequency representation (TFR) obtained by FDE–AJTF decomposition with four different optimal algorithms is shown in
Figure 6.
As shown in
Figure 5, the general trend of the signal is obtained with low resolution by STFT, while in
Figure 6, the four components were extracted by FDE–AJTF decomposition with higher resolutions. Furthermore, the four TFRs obtained by FDE–AJTF decomposition with different optimal algorithms are almost the same as each other, which indicates that the four TFRs correspond with the simulated signal generated as shown in
Table 1, and all the four optimal algorithms can satisfy the requirement of FDE–AJTF decomposition for mc-PPS signal.
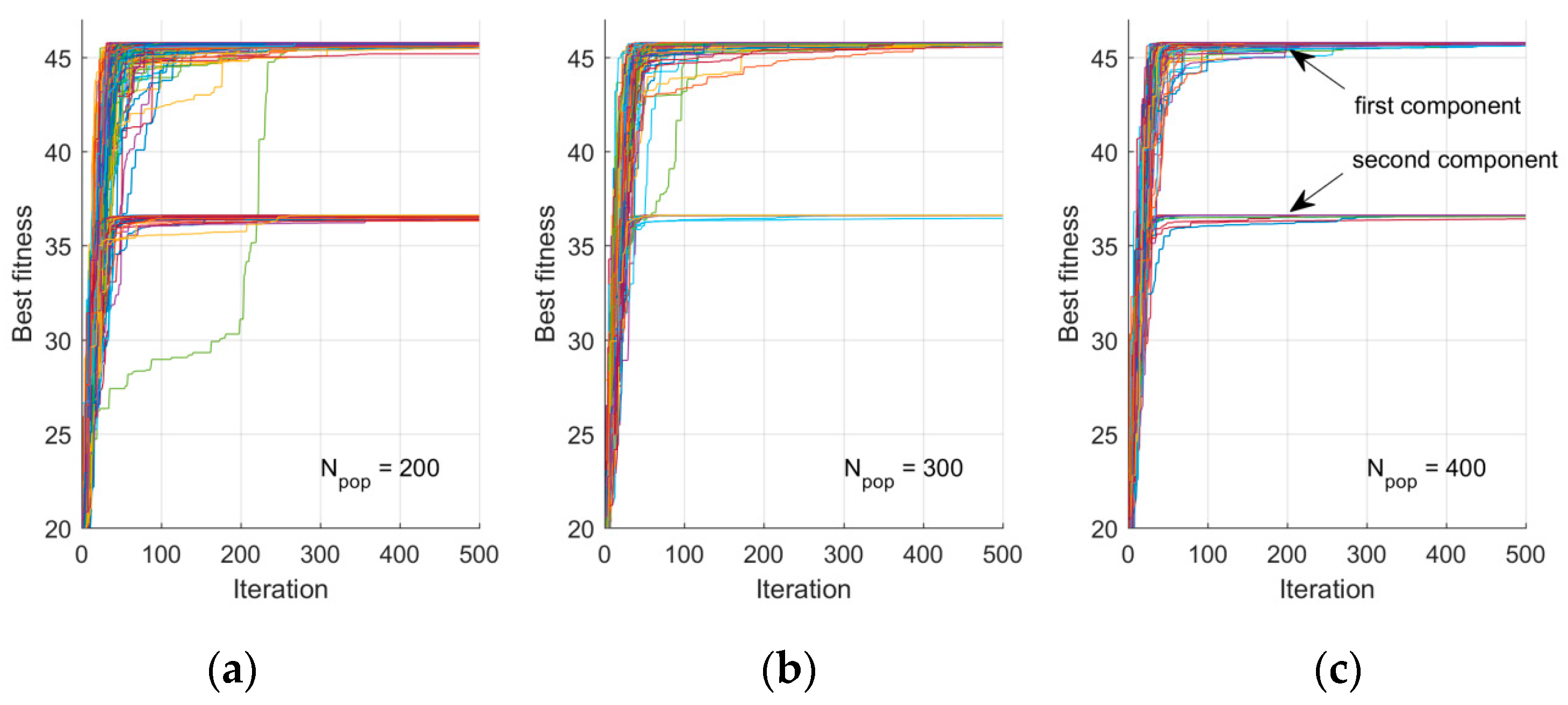
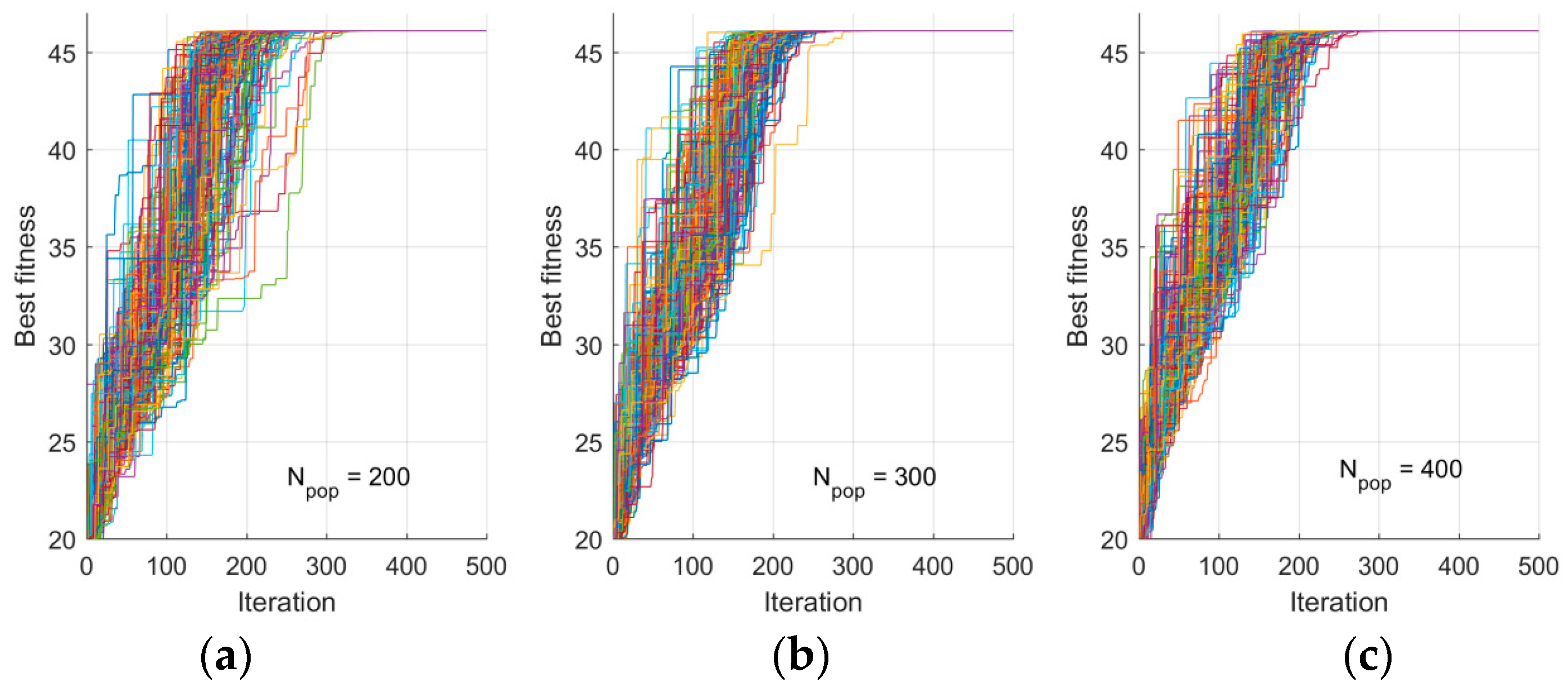
4.1. Convergence
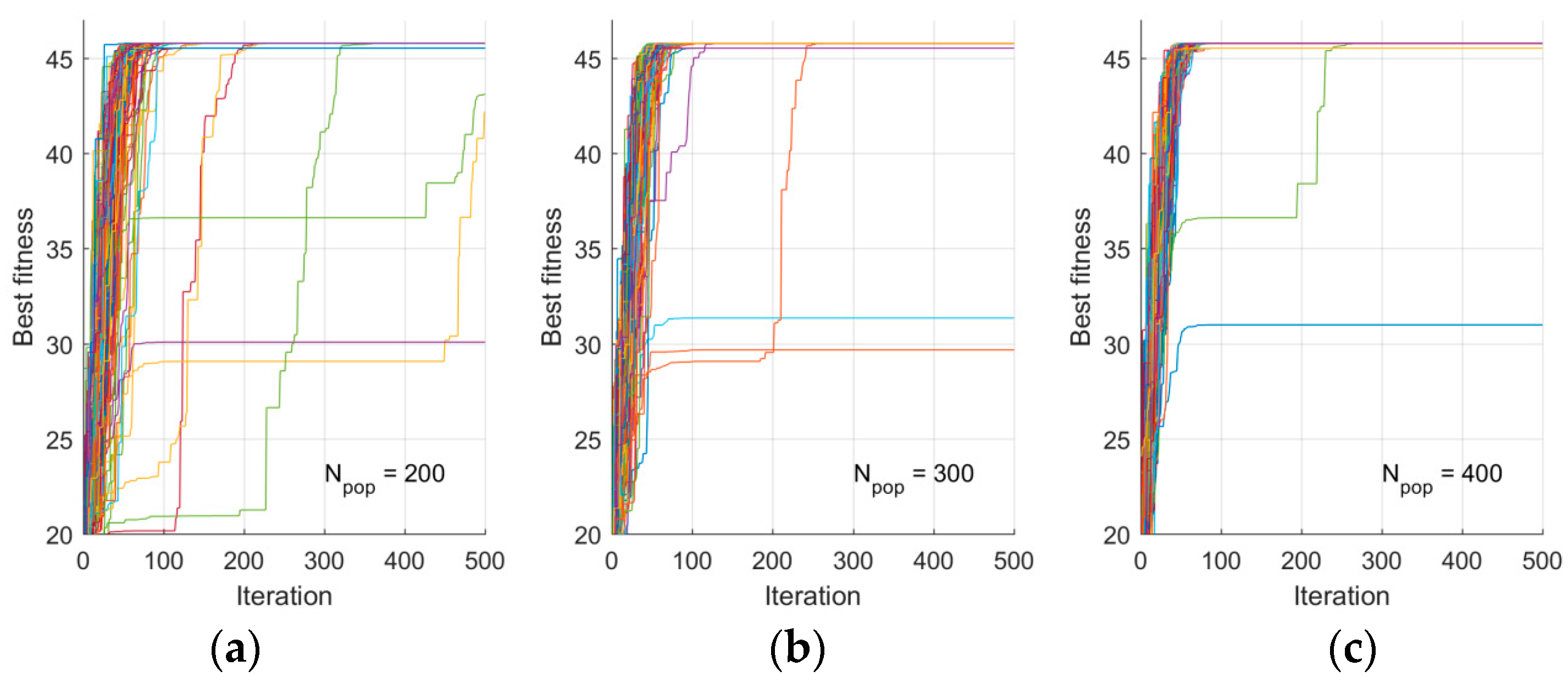
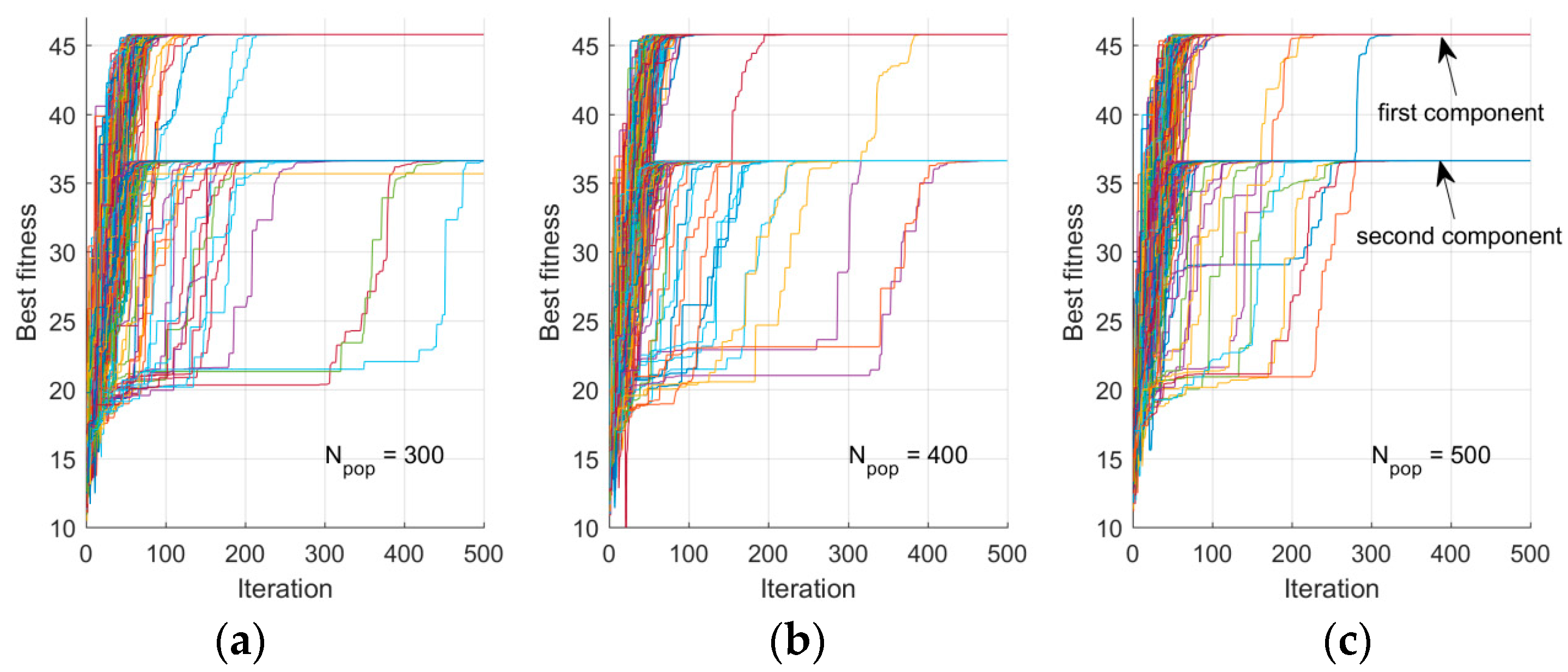
To get the statistical characteristics of the four optimal algorithms, a Monte Carlo test was carried out in each simulation for 500 times. The convergences of the four optimal algorithms can be expressed by the change curves of the best fitness in the population. When the first component was extracted, the four algorithms’ change curves of the best fitness with the iteration were as shown in
Figure 7,
Figure 8,
Figure 9 and
Figure 10.
As shown in
Figure 7,
Figure 8,
Figure 9 and
Figure 10, the best fitness values of the four algorithms converge to one or two values with increasing iterations, and the converging speed becomes faster with the increasing number of individuals. In
Figure 7, it is evident that some solutions of the GA algorithm fall into a local optimal solution and, in
Figure 9, the PSO has the fastest convergence speed and a few solutions fall into a local optimal solution, while in
Figure 8, the DE algorithm has the best convergence, but the slowest speed. As shown in
Figure 10, two solutions are obtained in the mc-PSO algorithm with good convergence, so even though its convergence speed is slower than the standard PSO, the searching times are reduced by half compared to the standard PSO.
Furthermore, in the worst case, the convergence of the mc-PSO is as the same as the standard PSO because of former one’s procedure in
Figure 4. Moreover, the lower convergence of the standard PSO is mainly caused by its local optimal solution, while in mc-PSO, when a local optimal solution is obtained by the Opt-group, the Sub-group has to search another solution out of the neighborhood of the local optimal solution, so the suboptimal solution would be the global optimal solution of the whole population. Then, in step (i) of the processing procedure, the roles of the two groups will be exchanged, finally the global optimal solution is obtained. As a result of that, the probability of correctly extracting the global optimal solution is increased by the two divided groups in the mc-PSO, and its convergence is enhanced as shown in
Figure 9 and
Figure 10.
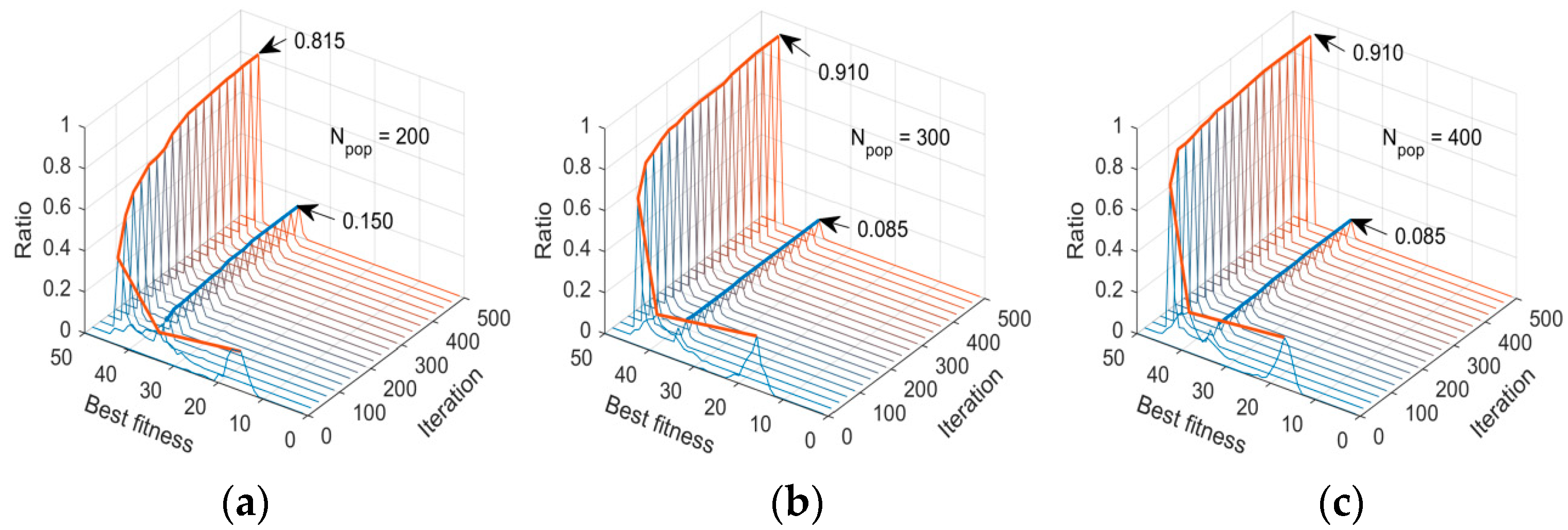
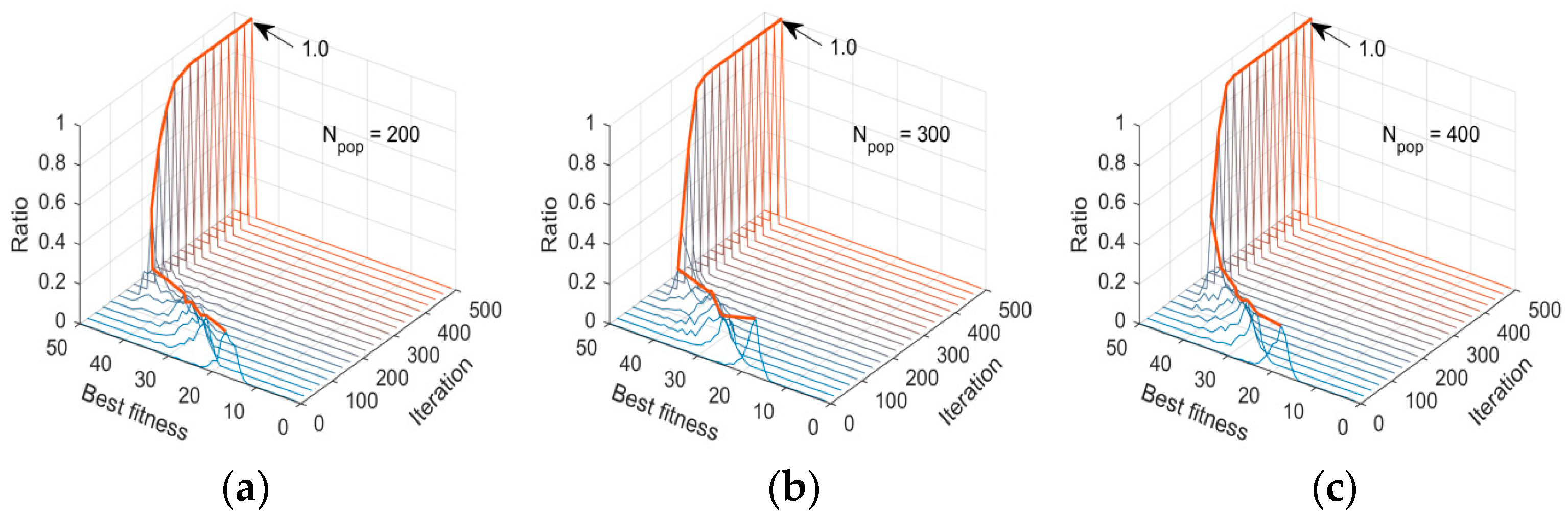
4.2. Accuracy
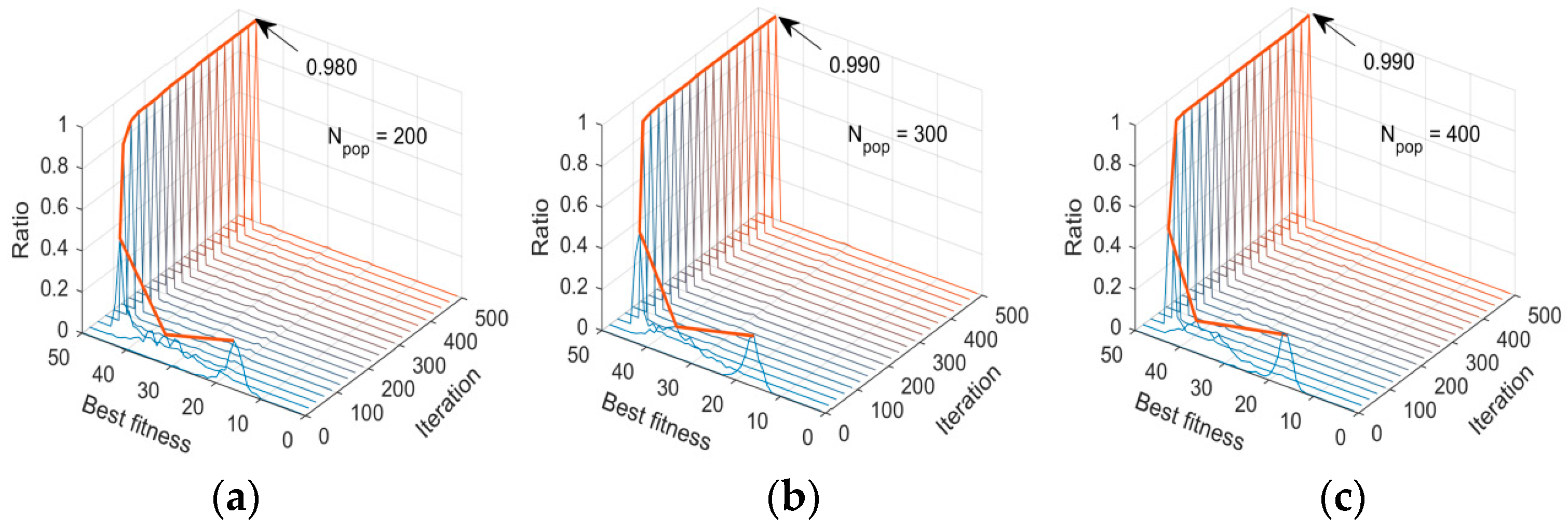
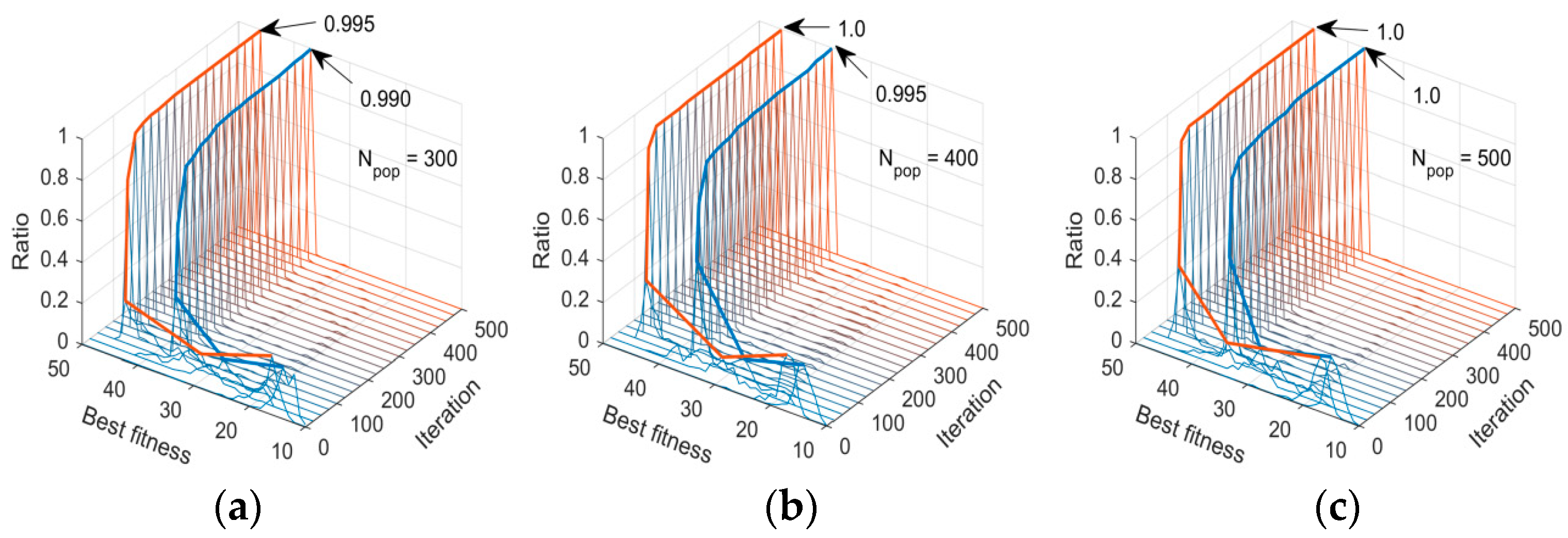
The accuracies of the four algorithms can be expressed by the probability of correctly extracting the first component, which can be expressed by the ratio of the individuals with the best fitness of the whole population. The accuracies of the four algorithms are shown in
Figure 11,
Figure 12,
Figure 13 and
Figure 14 and
Table 3.
As shown in
Table 3 and
Figure 11, when 400 individuals are present, the GA’s probability of correctly extracting the first component is 91%, and in
Figure 13, the PSO’s is 99%, and when only 200 individuals are present, the DE’s accuracy is already 100%. It is evident that the DE algorithm has the best accuracy and stability, those of the PSO are worse than the DE, and the GA has the worst. As shown in
Figure 14, when 500 individuals are present in the mc-PSO algorithm, the probabilities of correctly extracting the first and the second components are both 100%, which indicates that its accuracy is better than the standard PSO and its stability is improved.
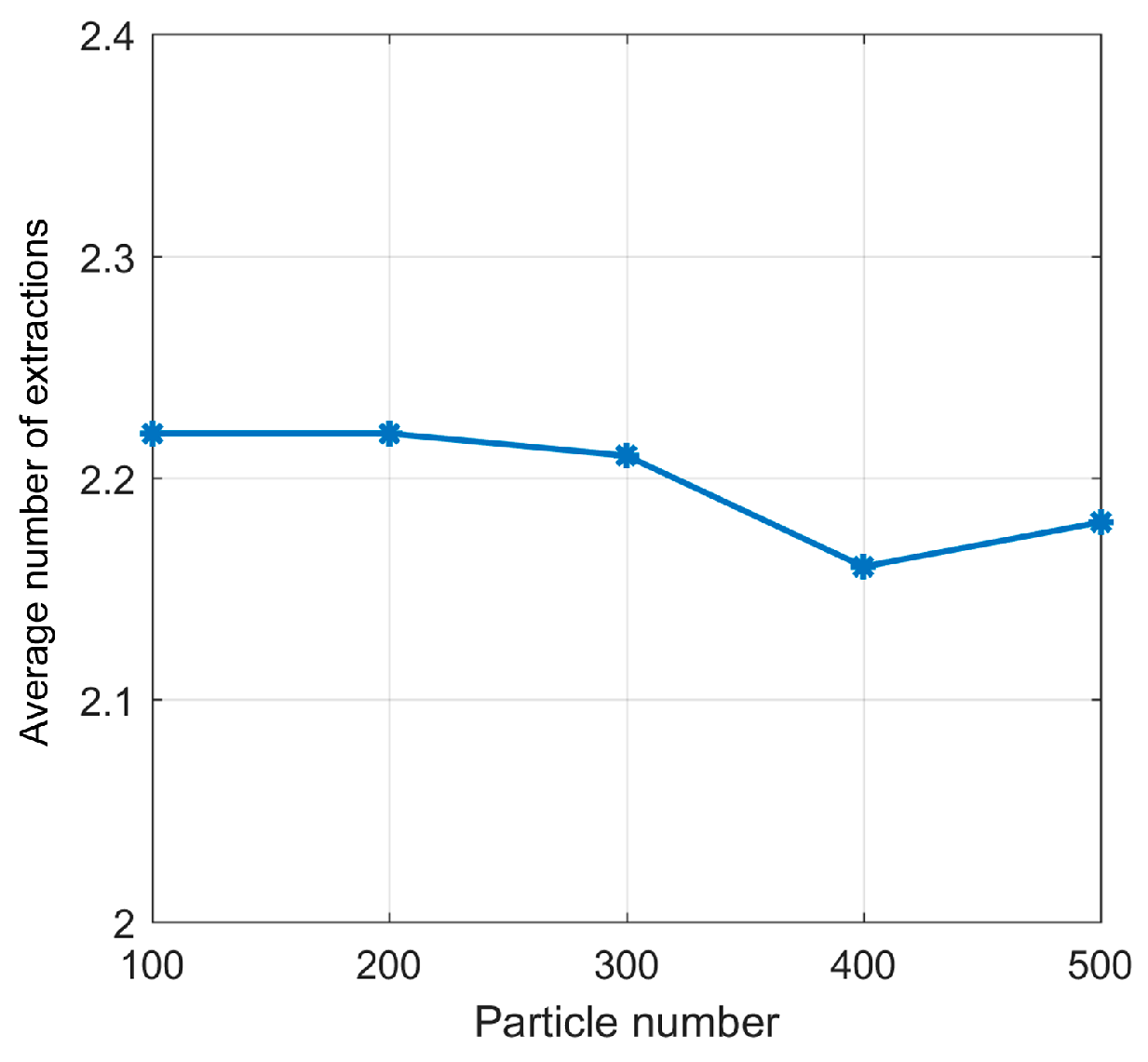
4.3. Computation
Due to the extraction error in the mc-PSO algorithm, having two components in one extraction may be not both effective, and more than two extractions may be needed to extract four components. The average number of extractions it needs to search for and extract four components is shown in
Figure 15.
As shown in
Figure 15, the average number of extractions is about 2.2, which indicates that the effectiveness judgment condition detailed in
Section 3.3 is effective and the components’ effectiveness is ensured.
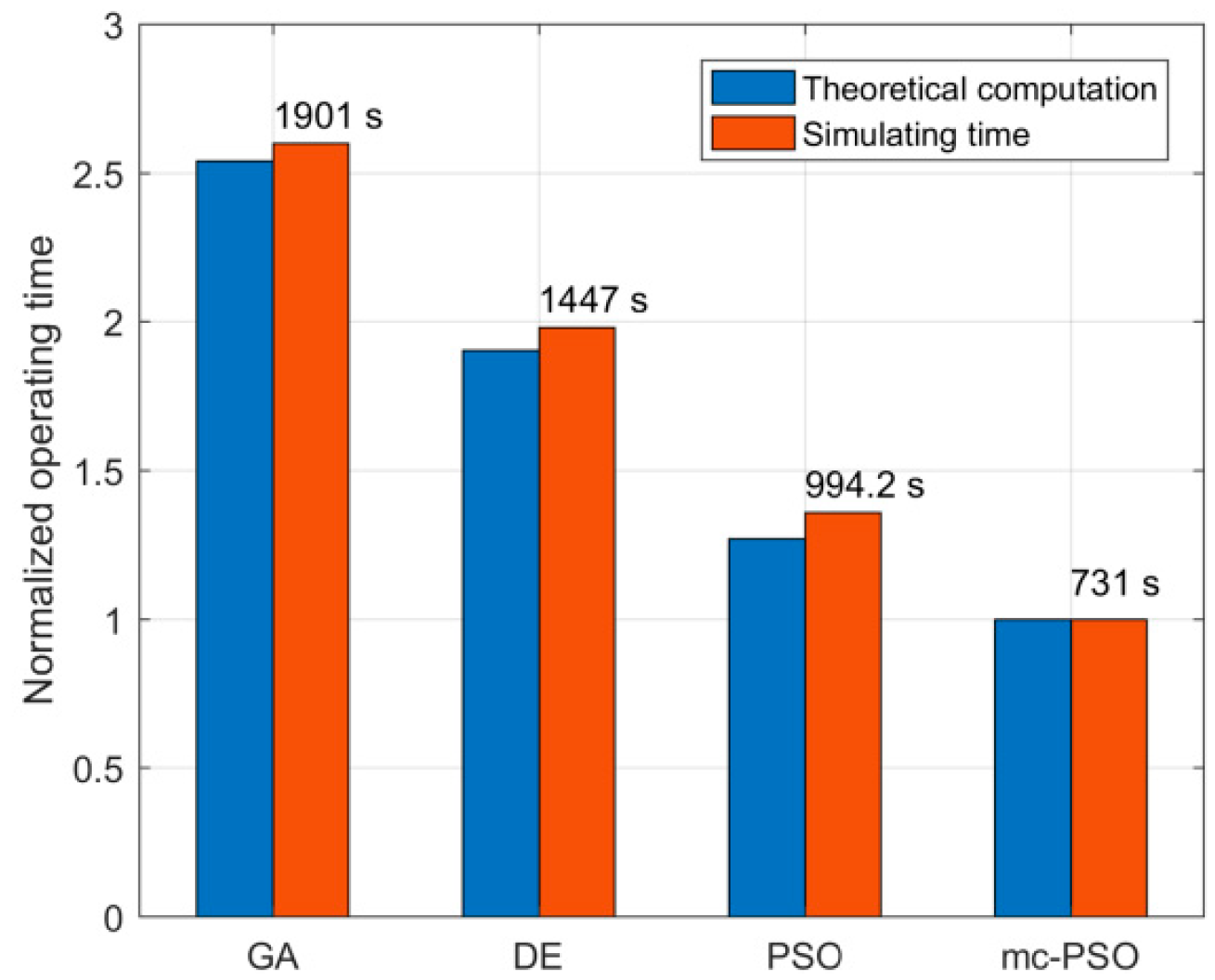
According to the detailed procedures of the four algorithms, the computations in every iteration are mainly from the individuals’ fitness update, which requires the Fourier transform. Therefore, the whole computation of the four algorithms can be expressed by their FFT operation times, which are shown in
Table 4. The simulation environment is shown in
Table 5, and the normalized computing time is shown in
Figure 16.
As shown in
Table 4, the mc-PSO has the least fitness update times of the four algorithms, which corresponds to the normalized theoretical value in
Figure 16, and the simulation time conforms to the theoretical value. It is evident that the mc-PSO has the lowest computational requirements and the shortest operation time, which confers about 30% improvement compared to the standard PSO algorithm.
5. Conclusions
The echo of maneuvering targets can be expressed as a multicomponent polynomial phase signal (mc-PPS), which should be processed by time frequency analysis methods. The FDE–AJTF decomposition is an effective method to correctly search for and extract the components of the mc-PPS signal. However, a difficult problem of the FDE–AJTF decomposition is searching for the optimal parameters in the solution space, which is essentially a multidimensional optimization problem with different extremal solutions. Although the PSO is an efficient and widely-used optimal algorithm, on one hand, it has disadvantages that easily fall into the local optimal solution; on the other hand, its feature makes extracting several components simultaneously possible.
In this paper, based on the feature of the standard PSO, a novel mc-PSO algorithm is presented to solve the multidimensional optimization problem, which has the new characteristic that can extract several components simultaneously. To achieve the purpose, the population of the mc-PSO is divided into three groups, i.e., optimal, suboptimal, and random groups, while the neighborhood of the best particle in the Opt-group is set as the forbidden area for the Sub-group, and then two different independent components can be extracted in one extraction by the Opt- and Sub-group, respectively.
Three simulation tests are carried out and compared with the standard PSO, GA, and DE algorithms, the performances in convergence, accuracy, and computation of the mc-PSO are analyzed. According to the test results, the GA has the worst performance in all three aspects; the DE algorithm has the best convergence and accuracy, but the slower speed; the standard PSO has the faster speed but worse convergence and accuracy than DE; the presented mc-PSO algorithm has the fastest speed and comparable convergence and accuracy with DE. As concluded, it is verified that the mc-PSO has the best performance and that the convergence, accuracy, and stability are improved, while its searching times and computation are reduced.
The real-time application is the eventual goal of an optimal algorithm; however, although the computation is reduced and the convergence speed is improved, the mc-PSO is hardly used in real-time applications yet, especially in high-resolution signal processing with large data. In the follow-up research, the real-time processing application of the mc-PSO or other optimal algorithms will be the direction and focus.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}