Abstract
During the Coronavirus Disease 2019 (COVID-19) pandemic, global awareness of infectious diseases increased markedly. Many infectious diseases are transmitted through direct or indirect contact with biological fluids containing pathogens such as viruses and bacteria. This risk is particularly pronounced in environments used by large numbers of unspecified individuals. Public restrooms, therefore, raise significant hygienic concerns, as toilet seats may serve as vectors for indirect transmission. To mitigate this risk, this study proposes a novel toilet seat equipped with an automatic cleaning function. Specifically, after use, the seat surface is automatically wiped by a cleaning cloth, eliminating the need for manual cleaning by staff. A fundamental operational concept is established, emphasizing the determination of an appropriate cleaning initiation timing that allows the cleaning sequence to be completed without compromising user convenience. Based on this concept, a belt–pulley type prototype is developed, and the effectiveness of the proposed cleaning sequence is verified. Subsequently, the prototype is further improved through the introduction of a flexible-rack mechanism. The control methodology, including the design of the electronic circuitry, is described in detail. Using the improved prototype, extensive simulations and experimental evaluations were conducted. The results showed that battery capacity declined at an approximately constant rate of 3% per 10 cycles, with about 70% remaining after 100 cycles. In addition, a single reciprocating cleaning cycle removed over 95% of artificially applied stains across the entire toilet seat. Additional evaluation results are presented in detail.
1. Introduction
Nearly six years have passed since the emergence of the novel strain of COVID-19. The pandemic has heightened public awareness of infectious diseases, particularly those caused by coronaviruses, which continue to pose significant global challenges. This heightened awareness has also drawn increased attention to public health issues. Recent studies have identified contact transmission as a major infection pathway for these diseases [1]. Such transmission occurs through direct contact with saliva, bodily fluids, secretions, or excretions containing pathogens, and can also spread indirectly via surfaces or objects contaminated by infectious agents. Environments with a high risk of contact-based transmission include public facilities, public transportation systems, educational institutions, and commercial spaces where large numbers of people congregate [2]. Among these, public toilets represent a notable hygiene concern, as they are shared by an unspecified and ever-changing population [3]. In particular, toilet seats present an unavoidable concern of indirect contact with others, contributing to widespread discomfort and reluctance to use such facilities [4].
Meanwhile, along with advances in sensor and internet-of-things (IoT) technologies, cutting-edge developments in smart restrooms [5,6,7] and IoT-based hygiene [8,9,10] approaches have been actively reported. Representative studies include IoT-enabled hygiene management for public restrooms, smart toilets for health monitoring in residential settings, and monitoring systems for elderly care. Related research can be largely categorized into two main areas. The first area addresses smart restrooms for public health and facility management, focusing on optimized cleaning schedules, consumable inventory management (e.g., toilet paper and soap), and improved energy and water efficiency. The second area involves smart toilets for health monitoring, which assume deployment in homes and care facilities and seek to enable continuous health assessment based on excreta and vital signs for early disease detection.
Cleaning robots encompass a wide range of platforms designed to address diverse tasks and operational environments, spanning applications from residential floor maintenance [11,12,13] to industrial cleaning [14,15,16]. Major categories include robotic vacuum cleaners, robotic mopping systems, and specialized robotic cleaners for windows and industrial facilities. Specifically, to prevent such infections [17], the development of toilet-cleaning systems and/or robots has been steadily progressing in [18]. For example, a system capable of cleaning both the interior of the toilet bowl and the bathroom floor is introduced in [19]. However, implementing this system requires replacing the existing toilet fixture with a newly designed unit, which entails large-scale construction work and raises significant practical concerns. Another study [20] proposes a neural network approach for generating robot trajectories within the confined toilet environment. Although the approach was tested for automated toilet cleaning, it is still limited to cleaning the inside of the bowl. Similarly, an articulated robotic arm equipped with a toilet-cleaning tool based on kinematic modeling and control algorithms is reported in [21]. Despite referencing COVID-19 prevention as motivation, the study focuses exclusively on floor cleaning. A review of these related works suggests that robotic systems can, in principle, contribute to maintaining toilet hygiene and provide some benefit in reducing infection transmission. However, these systems do not incorporate mechanisms for cleaning the toilet seat, which constitutes a primary surface for unavoidable indirect contact and heightened contact-infection risk. Therefore, they do not mitigate the discomfort reported by users.
To overcome these limitations, this study proposes a toilet seat equipped with an automatic cleaning function [22,23]. The primary objective of this system is to keep the toilet seat hygienic while maintaining user comfort and practicality. Further details on the design goals are summarized in Table 1. A fundamental design policy of the proposed seat-cleaning system is to establish a cleaning sequence that does not cause stress or inconvenience to the user. To implement this policy, particular attention is given to determining the appropriate timing for initiating the cleaning process. After use, the toilet lid closes in response to flushing, and sensors detect this closure to activate the cleaning sequence.

Table 1.
Details on design parameters and target values for the seat-cleaning system.
Next, a cleaning sequence for the seat-cleaning system starts with the delivery of cleaning fluid to washing tools such as sponges, enabling thorough and uniform cleaning of the seat. Upon completion, the tool returns to its initial positions. To realize this sequence, the first prototype utilizing a belt–pulley mechanism is developed. Operational evaluations verify the feasibility of the concept. The prototype also reveals key challenges, including belt elongation and slackening during repeated operations. In addition, mechanical interference is observed between the enlarged lid structure and the toilet tank when the prototype is installed on an actual toilet unit.
To address these challenges, another enhanced prototype employing a flexible-rack mechanism is proposed. In contrast to soft belts, rigid rail structures provide superior durability and substantially reduce slack. Additionally, the electronic control circuit and the cleaning-fluid delivery unit are relocated from the toilet lid to the side of the toilet to mitigate the interference issue. Using this refined flexible-rack mechanism, a series of evaluations is carried out. Numerical simulations are performed to determine key parameters such as sponge orientation, contact area, pressure distribution, and other critical indices. Based on these results, the sponge angle is adjusted to improve cleaning efficiency. Extensive experiments are then conducted to validate the performance of the proposed automatic seat-cleaning device. The results are analyzed, and directions for future development are discussed. Finally, the main contributions of this paper are summarized as follows:
- A seat-cleaning system is proposed for curved, elliptical toilet seats that require under-lid cleaning.
- A contact model incorporating the elastic deformation of a sponge is developed to analyze the contact area and pressure distribution.
- An image-based evaluation metric is employed to experimentally and quantitatively assess cleaning performance.
The remainder of this paper is organized as follows: Section 2 describes the concept of the proposed automatic seat-cleaning system. Section 3 details the development of the prototype, including its electronic control circuit. Section 4 presents the evaluation results and provides corresponding discussions. Finally, Section 5 concludes the paper.
2. Design Policy of Automatic Seat-Cleaning System
This section outlines the cleaning process that underpins the design of the automatic toilet seat-cleaning system. The fundamental concept of the system is to enable automatic seat cleaning, thereby eliminating the need for manual intervention. This requires careful consideration of the appropriate timing for initiating the cleaning process. In general, the toilet lid remains open during use and closed at other times. As the toilet state changes depending on user presence and usage, the determination of the appropriate timing for starting the cleaning process is a key factor in both mechanism design and control implementation.
The cleaning sequence for the proposed seat-cleaning system is illustrated in Figure 1. In this sequence, cleaning is initiated immediately after the user has finished using the toilet. Specifically, the cleaning is automatically initiated when the lid-mounted sensor detects that the toilet lid has closed. Depending on the circumstances, the previous user may exit and the subsequent user may enter the restroom while the cleaning is ongoing. Once the cleaning is completed, the next user simply opens the lid to use the toilet. After use, the lid is closed again, which triggers the subsequent cleaning sequence. The sequence should be configured to eliminate the need for users to wait until the cleaning process finishes, improving user convenience. Meanwhile, the sequence requires only opening and closing the toilet lid, ensuring ease of use and preserving user comfort. Since cleaning begins when the lid is closed, the seat-cleaning device naturally encourages users to close the lid. According to [24], closing the lid before flushing reduces the dispersion of pathogens compared with leaving it open. Therefore, this cleaning process makes a meaningful contribution to infection prevention.

Figure 1.
Conceptual illustration for the cleaning sequence of the automatic seat-cleaning system.
Based on the cleaning sequence, a seat-cleaning mechanism and a detailed operational flow are developed. The geometry of the toilet seat has a complex, nearly elliptical shape. Furthermore, after the cleaning fluid is dispensed onto the cleaning cloth (e.g., a sponge), the sponge needs to perform a reciprocating motion along both the anterior and posterior surfaces of the seat. To accommodate these complex motions, a belt–pulley mechanism and its corresponding operational flow are designed.
The developed mechanism and operational flow are illustrated in Figure 2. Regarding the mechanism, a belt–pulley unit is initially employed to accommodate the complex geometry of the toilet seat, as shown in Figure 2a. This unit enables the motor mounted on the outer surface of the toilet lid to drive the belt, thereby transporting the sponge from the exterior surface of the lid to its underside and subsequently guiding it along the contour of the seat. Next, Figure 2b presents the cleaning operational flow. The sponge initially rests beneath the cleaning-fluid inlet located on the anterior surface of the lid. When the lid is closed, a sensor is activated, triggering the injection of cleaning fluid into the sponge. The motor on the anterior surface of the lid then rotates, guiding the sponge toward the inner side of the lid. Finally, the sponge traverses along the toilet seat, performing the cleaning operation.
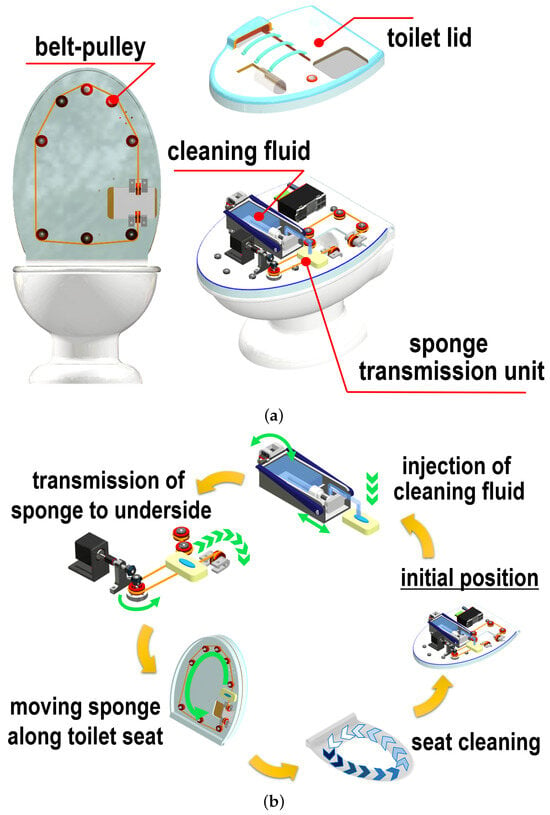
Figure 2.
Illustration of the mechanism and operational flow: (a) mechanism and hardware configuration; (b) cleaning operation flow.
3. Prototype Development of Toilet Seat-Cleaning
3.1. Configuration of Belt–Pulley Type Prototype
Based on the mechanism and operational flow described in Section 2, a prototype is developed. The developed prototype is shown in Figure 3. It is composed of two main components: an external cover module and an internal drive module. The drive module integrates the proposed belt–pulley unit together with the cleaning-fluid injection unit. The cover module features a transparent access container that allows visual inspection of the remaining cleaning-fluid level and facilitates easy refilling or replacement. In addition, viewing windows are positioned above both the motor and the sponge-movement area, enabling users to visually confirm the operational status of the device.
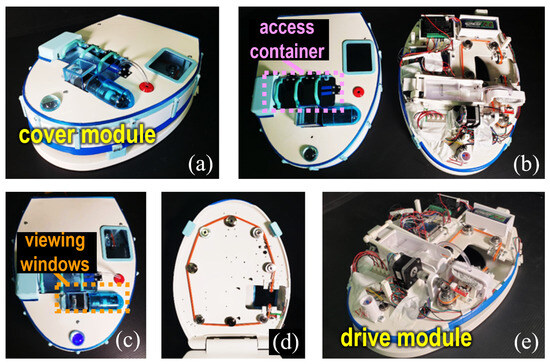
Figure 3.
Configuration of belt-pulley type prototype: (a) overall view of prototype; (b) external cover (left) and internal drive (right) modules; (c) details on seat cover; (d) belt–pulley unit of seat cover; (e) details on electronic circuitry.
However, several practical challenges arise when considering the implementation of this seat-cleaning system in real toilet environments. The first issue concerns the durability of the belt–pulley unit used in the drive module. The seat-cleaning system is designed to automatically perform cleaning operations by accommodating the contour of the seat, moving beneath the toilet lid, and reaching the cleaning-fluid injection unit located on the lid surface. To achieve this, a belt–pulley unit capable of transmitting motor power in three dimensions (3D) is adopted. However, repeated operations cause the belt to gradually elongate and loosen, ultimately degrading the unit’s performance. When this occurs, maintenance personnel have to either replace the belt or manually adjust its tension. Addressing this issue requires developing an alternative mechanism to replace the belt–pulley unit. Although the required durability varies with usage conditions, a mechanism capable of withstanding several thousand cleaning cycles is necessary for the proposed prototype to be considered suitable for practical deployment.
The second issue concerns the structural configuration of the cover module, which leads to interference with the toilet tank and surrounding components. All essential elements including the motor and its driver for the belt–pulley unit, the cleaning-fluid injection unit, electronic circuits, additional control components, and the battery, are positioned on the anterior side of the toilet lid. As a standalone device, this arrangement enables a vertically integrated and compact design with minimal overall volume. However, in an actual toilet environment, installation of the belt–pulley type prototype results in interference between the enlarged lid structure and the toilet tank, which hinders smooth lid operation. This limitation poses a significant barrier to the practical implementation of the smart toilet seat.
3.2. Configuration of Flexible-Rack Type Prototype
To overcome these limitations, the design improvements required for reliable operation are thoroughly investigated. To begin, in terms of the durability of the drive module, a new mechanism is designed (see Figure 4). In contrast to the soft belt used in the belt–pulley unit, the new design incorporates rigid plastic rails. Multiple spur gears are mounted along these rails and driven by a motor, allowing for the precise movement of the cleaning cloth. Next, the structural configuration of the prototype is reconfigured. The cleaning-fluid injection unit and the controller are relocated from the anterior side of the toilet seat lid. As shown on the right side of Figure 4, these components are operated by extending the rails of the drive module beyond the lid and connecting them externally. This modification reduces structural interference and enhances overall compatibility with the toilet environment.

Figure 4.
Design concept for enhanced flexible-rack prototype. Here, the left and the right sides indicate the drive and control modules, and the cleaning operation flow of the flexible-rack type prototype, respectively.
Based on these solutions, the components required for actual operation are determined, and the corresponding mechanisms are designed to accommodate them. Polylactic acid (PLA) is used as the primary material for fabricating the mechanisms. All parts are manufactured using a Creality Ender-3 3D printer (Shenzhen Creality 3D Technology Co., Ltd., Shenzhen, China). The redesigned prototype consists of three distinct modules: drive, cleaning, and control modules (see Figure 5).
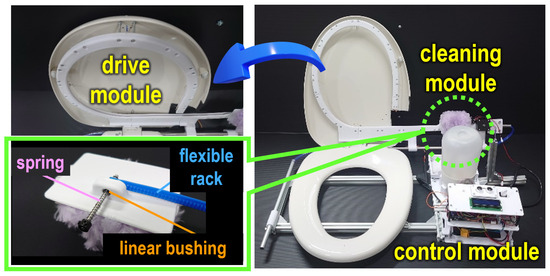
Figure 5.
Details on flexible-rack type prototype.
Details on these modules are described below. First, the drive module consists of 3D-printed rails shaped to match the contour of the toilet seat, a plastic flexible rack, a spur gear, and a stepper motor. Specifically, as a key selection rationale, stepper motors generally operate without encoders, allowing the simplification of both the circuit configuration and control architecture. The primary functionality of the enhanced prototype lies in the mechanism used to actuate the rails. As shown in the upper-left portion of Figure 5, the rail is configured with an increasing offset from the toilet lid toward the end opposite the hinge, thereby allowing the cleaning trajectory to follow the seat’s geometry accurately. A guide is also placed near the hinge, where space is highly constrained, to prevent undesired tilting of the cleaning module. The flexible rack is routed through the rail, and a stepper motor is mounted at the front of the drive module. The motor’s rotation is transmitted to the flexible rack through a spur gear, thereby driving the cleaning module attached to the rack. In the developed prototype, the cleaning unit repeatedly travels along a predefined rail, and the motor rotation direction is reversed when contact switches at both ends of the rail are triggered. Consequently, high-speed operation, high torque, absolute positioning accuracy, and immediate disturbance compensation are not required; instead, smooth and stable motion is prioritized.
Next, as shown in the bottom-left portion of Figure 5, the cleaning module is composed of a rigid attachment used to mount the sponge and the sponge itself, which functions as the cleaning medium. The attachment is fabricated from a PLA material, whereas the sponge is made of a soft, compliant material. In addition, the attachment incorporates both a spring and a linear bushing. These components enable adjustment of both the contact area and the applied pressure between the sponge and the toilet seat. As a result, the cleaning motion effectively conforms to the curved surface of the seat.
3.3. Electronic Components for Control Module
To control the operation of the drive and cleaning modules described above, an electronic control circuit for the control module is implemented. As shown in Figure 6, the control module consists of an Arduino Uno microcontroller (Arduino Co., Ltd., Lombardia, Italy), an Usongshine stepper motor 17HS3401S-15B (Shenzhen Youshengguangcai Electronics Co., Ltd., Shenzhen, China), an EasyDriver stepper motor driver ROB-12779 (SparkFun Electronics, CO, Niwot, CO, USA), and an ultra-compact D2F-FL basic switch. The microcontroller regulates the motor driver by generating pulse-width modulation (PWM) signals and controlling digital input/output (I/O) interfaces. The clock pulses and the direction (DIR) signals are supplied to the motor driver, allowing for the control of the motor’s rotation direction, speed, and timing. A gear is mounted on the output shaft of the stepper motor, enabling direct actuation of the cleaning module attached to the flexible rack within the drive module.
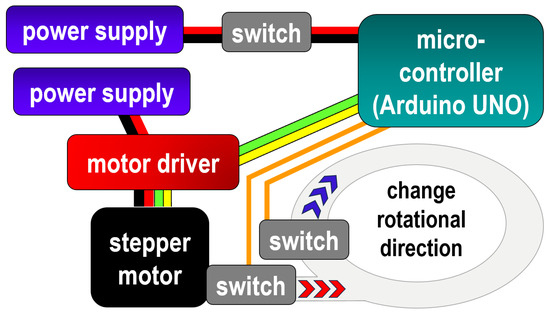
Figure 6.
Control flow in the control module.
Specifically, the control module employs a fixed-delay method to intentionally introduce a brief temporal offset between input signal detection and output control execution, thereby ensuring stable and reliable operation. This delay fulfills three roles. The first objective is to suppress chattering in mechanical contact switches. Upon actuation, contact vibrations may produce rapid ON/OFF transitions on the order of several milliseconds; if processed immediately, these signals can cause malfunction. To prevent this issue, a short delay is introduced after input detection so that signal processing is performed only once the input has stabilized. The second objective is to provide sufficient physical response time for the inertia of the motor and drive mechanism. Instantaneous switching of control signals during motor direction reversal or immediately after stopping can induce back electromotive force (EMF) or inrush current. To prevent excessive loading on the motor driver and mechanical components, an appropriate delay is introduced prior to reversal. By ensuring that the motor comes to a complete stop before new commands are issued, safe and stable operation is achieved. The third objective is to enhance the temporal stability of the control module. By appropriately regulating the interval between input acquisition and output execution, interference among control stages is effectively suppressed, thereby stabilizing the overall operation of the developed prototype.
The control timing flow for the aforementioned electronic components is illustrated in Figure 7. In the developed prototype, the cleaning module moves along the rail described in the previous section. When the toilet lid is closed, a contact switch detects the lid state and sends a digital input signal to the microcontroller. Upon receiving this signal, the controller initiates the cleaning sequence by driving the stepper motor in the forward direction. The cleaning module then travels toward the position of the cleaning-fluid injection unit, where the operation is temporarily paused to allow the sponge to absorb the cleaning fluid. Afterward, the motor resumes rotation, enabling the cleaning module to traverse the seat surface. When the module reaches the end of its predefined travel range, another contact switch is triggered, prompting the controller to reverse the motor direction. Through this sequence, the cleaning module performs a stable reciprocating motion along the rail, allowing the toilet seat to be cleaned automatically within a predetermined range.
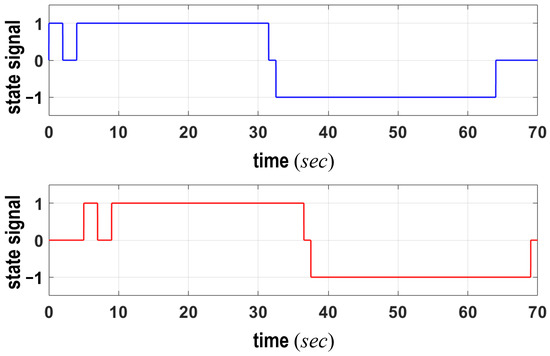
Figure 7.
Illustration of control timing flow (top: input signal, bottom: output signal).
4. Evaluation Results & Discussion
This section presents the evaluation results of the developed prototype, with the objective of enhancing its practical applicability through comprehensive simulations and experimental investigations.
4.1. Simulation Results
To begin, extensive simulations were performed using MATLAB R2025b (The MathWorks, Inc., Natick, MA, USA) on an LG Gram laptop (LG Electronics Co., Ltd., Seoul, South Korea) equipped with an Intel® Core™ i7-1260P CPU and running Microsoft Windows 11 Home. The coordinate system used in these simulations is defined as follows. The toilet seat is assumed to lie on the -plane, with the gravitational direction oriented perpendicular to this plane. The origin O is defined as the intersection of the and . Specifically, and pass through the center of the toilet seat as O, and are aligned with its long and short sides, respectively. Finally, is oriented opposite to .
The simulations described below were performed to investigate and obtain quantitative data necessary for achieving effective cleaning. As a fundamental requirement for sponge-based cleaning, direct contact between the sponge and the toilet seat was necessary, and maximizing the contact area was critical for enhancing cleaning performance. Accordingly, the simulations focused on analyzing the contact area between the sponge and the seat.
In our simulations, a linear elastic material model was adopted for both the sponge and the toilet seat to evaluate relative contact patterns and trends in pressure distribution. The sponge was modeled as soft polyurethane foam with a Young’s modulus of 30 kPa and a Poisson’s ratio of 0.3, while the toilet seat was modeled as a rigid plastic with a Young’s modulus of 1.5 GPa and a Poisson’s ratio of 0.38, representative of typical polymer-based seats. These material properties were selected not to reproduce absolute stress values, but to enable consistent comparison of contact area and pressure distributions under different inclination angles.
First, simulations were conducted to investigate how the angle between the attachment (the base to which the sponge is mounted) and the toilet seat affects the resulting contact area. This angle is hereafter referred to as attachment angle. The simulation results are presented in Figure 8. This graph indicates that the contact area increases sharply from 0° to 8°, reaching a maximum of approximately 950 mm2, and then gradually decreases as the angle increases from 8° to 30°.
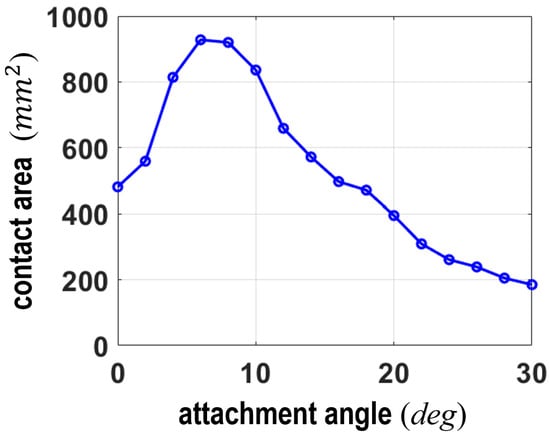
Figure 8.
Simulation results showing variations in contact area with respect to attachment angle.
The 3D chart in Figure 9 further illustrates the contact interface between the attachment, represented by the purple square, and the toilet seat, represented by the colored curved surface. Simultaneously, these graphs visualize in 3D how variations in attachment angle influence the expansion and contraction of the contact area. These results could be attributed to the rigidity of the attachment material. As previously mentioned, the attachment was fabricated from PLA, a rigid material that retained its shape without deformation. This rigidity restricted its ability to conform to the curved surface of the toilet seat. Consequently, as attachment angle increased, the contact area expanded until approximately 8°, where the attachment surface most closely approached the seat geometry. Beyond this angle, further conformity was limited by the mismatch between the rigid attachment and the curved seat surface. As a result, further increases in the attachment angle did not lead to a meaningful expansion of the contact area. These results indicated that rigid materials alone were insufficient for achieving effective seat cleaning. In contrast, flexible materials could deform to better conform to the curved geometry of the toilet seat, thereby enabling a substantially larger contact area. Accordingly, these simulation results provided essential quantitative insight for identifying suitable material properties and geometrical parameters when designing the cleaning unit, and they established a baseline for subsequent analyses involving flexible cleaning elements such as sponges.
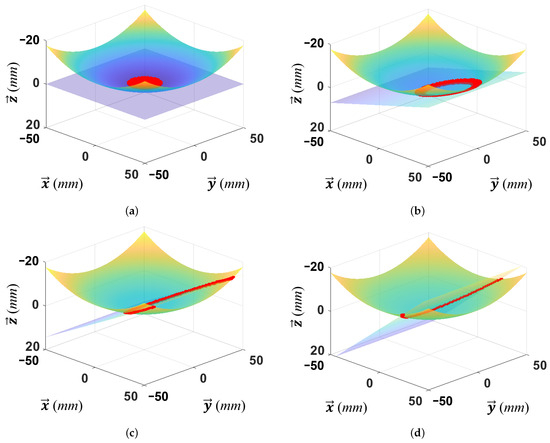
Figure 9.
3D chart showing the contact area between the attachment and the toilet seat: (a) attachment angle: 0°; (b) attachment angle: 8°; (c) attachment angle: 16°; (d) attachment angle: 24°.
Next, informed by the preceding simulation analysis, additional simulations were performed to investigate how the angle between the sponge on the attachment and the toilet seat influences the contact area. This angle, referred to as sponge angle, is treated separately from the previously defined attachment angle. The corresponding results are shown in Figure 10. This graph shows that the contact area increased monotonically with the sponge angle, reaching a maximum at approximately 26°. This pattern was markedly different from the trend observed in Figure 8. The minimum contact area was approximately 3000 mm2, while the maximum reached about 5200 mm2, which was more than three times larger than the values obtained for the attachment-only case. This noticeable difference could be attributed to the distinct material properties of the sponge compared with the rigid attachment. Unlike the rigid attachment, the sponge was a compliant material that deformed when pressed against the toilet seat. This deformability allowed the sponge to conform closely to the curved geometry of the seat, thereby eliminating the edge-lifting state observed in the previous simulation. Consequently, the contact area increased as the sponge angle became larger. These results indicate that employing a soft sponge material could substantially expand the effective contact area and, as a result, enhance overall cleaning performance.
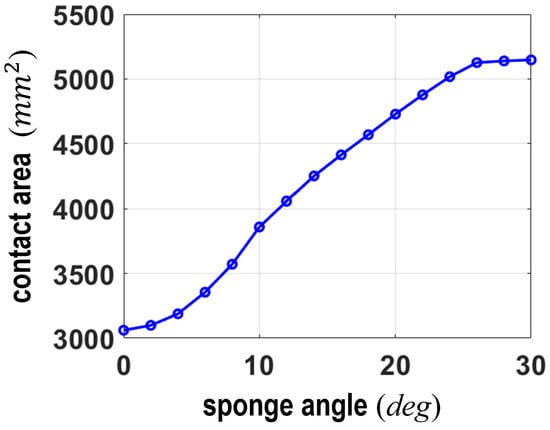
Figure 10.
Simulation results showing variations in contact area with respect to sponge angle.
Moreover, the deformation of the sponge generated pressure on the seat surface (see Figure 11). Specifically, at sponge angles of 0°, 8°, 16°, and 24°, the simulated pressures were approximately 20, 30, 40, and 50 kPa, respectively. The factors contributing to this pressure increase with larger sponge angles were examined. Flexible materials such as sponges underwent localized compression under the applied force and conformed to curved surfaces, thereby improving pressure distribution across the toilet seat. This pressure generated stable friction suitable for cleaning over a wide area. Consequently, the sponge was able to scrub the toilet seat surface effectively, indicating a high potential for efficient cleaning.
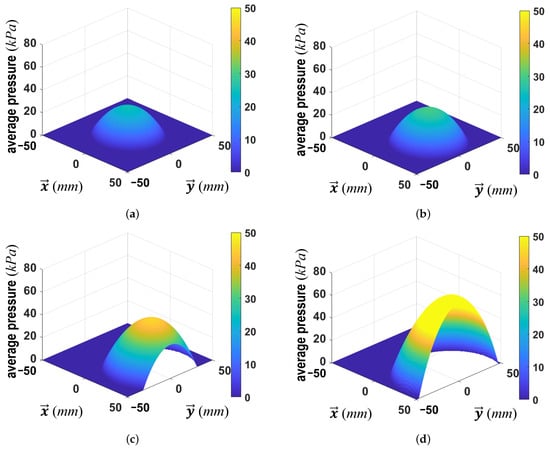
Figure 11.
Simulation results of pressure distribution on the seat surface according to sponge angle: (a) sponge angle: 0°; (b) sponge angle: 8°; (c) sponge angle: 16°; (d) sponge angle: 24°.
Next, Figure 12 illustrates the analytic relationship between contact area and pressure. The results showed that pressure generally increased as the contact area expanded. While the contact area reached a saturation point at approximately 5200 mm2 and exhibited no further growth, the pressure continued to rise beyond this point. This trend indicated that, once the sponge had sufficiently expanded its contact area, additional applied force led to increased compression within the same region, thereby elevating the local pressure. This tendency reflected the inherent compression characteristics of the sponge material. Flexible and porous materials such as sponges initially underwent substantial deformation under relatively small applied forces. However, after exceeding a certain deformation threshold, the internal cellular structure became increasingly compacted, resulting in a marked increase in stiffness. This mechanical trend explained why pressure continued to increase even after the contact area had ceased to expand. As discussed previously, the friction generated by the applied pressure contributed to enhanced cleaning effectiveness. Conversely, excessive compression was found to potentially accelerate sponge wear and reduce the durability of the cleaning module, including the attachment. Accordingly, the insights obtained from these simulations enabled the identification of operating conditions that maximized the contact area while preventing excessive pressure. These results demonstrated the feasibility of optimizing the trade-off between cleaning performance and long-term durability.
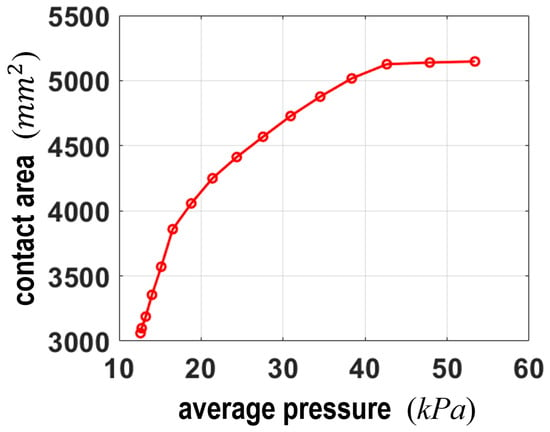
Figure 12.
Simulation analysis of contact area variation with pressure distribution.
Furthermore, 3D graphs were used to visualize the pressure distribution by representing the sponge, the toilet seat, and the pressure magnitude with corresponding color bars (see Figure 13). In these graphs, the sponge was depicted as a green square, while the toilet seat was represented as a dark blue circular shape with a central opening. The results demonstrated a clear correlation between increasing sponge angle and rising pressure. In addition, the spatial extent of the pressure distribution was observed to expand as the sponge angle increased. Notably, as the sponge deformed to conform to the curved surface of the toilet seat, pressure was transmitted toward the outer edges of the contact region, resulting in a highly uniform pressure distribution over a wide area. This expansion of the pressure distribution was attributed to the deformation characteristics of flexible materials such as sponges. Moreover, the results indicated that pressure was not only locally intensified, as observed in previous simulations, but also propagated to surrounding regions. These findings highlighted a characteristic unique to flexible materials like sponges—their ability to expand the effective cleaning range.
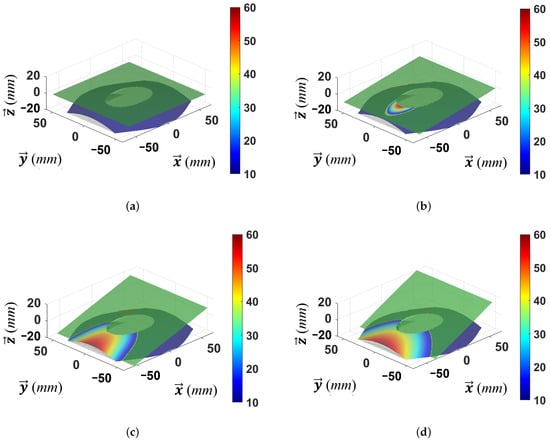
Figure 13.
Simulation results for the pressure distribution of sponge on the seat surface according to sponge angle: (a) sponge angle: 0°; (b) sponge angle: 8°; (c) sponge angle: 16°; (d) sponge angle: 24°.
These simulation results indicated that maximizing the cleaning performance of the developed seat-cleaning device required appropriate adjustment of both attachment angle and sponge angle. In particular, angle conditions that allowed the pressure distribution to spread without generating excessively high local pressures were found to offer the potential for achieving high cleaning efficiency while suppressing sponge wear. Furthermore, the simulation model was parameterized by the toilet seat surface geometry and the relative angle between the cleaning unit and the seat, rather than by fixed dimensions. Consequently, variations in seat size or shape did not require fundamental changes to the control timing flow; adaptation could be achieved by tuning the parameters to match the target geometry. This flexibility enabled it to be readily applied to a wide range of toilet seats used in both residential and public facilities, demonstrating high scalability and adaptability. Accordingly, this series of simulations demonstrated that enhanced cleaning performance could be achieved through optimized angle design. Moreover, these findings were expected to provide valuable guidance for the subsequent evaluation experiments conducted using the developed prototype.
In this study, several simplifying assumptions were introduced in the simulations regarding the toilet seat geometry, the material characteristics of the cleaning unit, and the contact conditions between the toilet seat and the cleaning unit. In practice, toilet seats exhibit geometric imperfections such as minor surface irregularities, and the sponge material may display nonlinear elastic and rate-dependent characteristics. Moreover, dynamic effects, including inertia and vibration of the developed prototype, may arise during operation. These factors can influence local contact conditions and pressure distributions, potentially limiting quantitative accuracy. Nevertheless, the adopted assumptions facilitate a systematic investigation of relative trends in contact area and pressure distribution. Accordingly, the proposed simulated model is well suited for guiding the design and parameter tuning of the prototype. Future work will incorporate more detailed material models and experimental validation under realistic operating conditions.
4.2. Experimental Results
Based on the insights obtained from the simulation results, the flexible-rack type prototype was further refined. Specifically, both attachment angle and sponge angle were set to their respective optimal values, thereby achieving a balanced condition between contact area and pressure distribution. To evaluate the effectiveness of the enhanced prototype, a series of performance tests was conducted. First, experiments were performed to determine whether the entire toilet seat surface could be covered within a single cleaning cycle. Two distinct motion trajectories were recorded using only the attachment and using the sponge mounted on the attachment.
The results of these experiments are presented in Figure 14. This graph indicates that, although the attachment alone was able to cover a large portion of the seat surface, as shown in Figure 14a, it could not achieve complete coverage. In contrast, when a sponge was mounted on the attachment (see Figure 14b), its deformation characteristics expanded the cleaning range, enabling full coverage of the seat surface. These results confirmed that the flexibility of the sponge and the conformity to curved surfaces substantially improved the effective cleaning area. These experimental results were consistent with the simulation results, demonstrating that the improvements based on the optimized angle were effective in extending the cleaning range and suggesting strong potential for high performance under actual operating conditions.
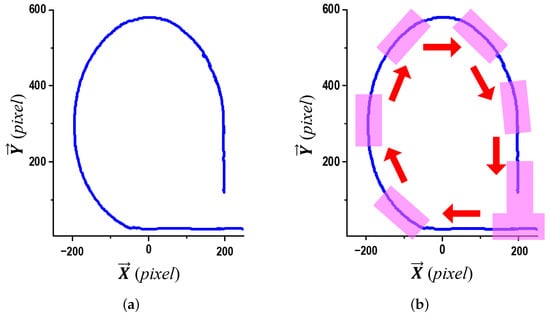
Figure 14.
Experimental results for cleaning trajectories by the drive module, where the pink box and the red arrow indicate the sponge trajectory and the movement direction, respectively. (a) only attachment; (b) sponge mounted on attachment.
Next, a performance comparison was conducted between the belt-pulley and the flexible-rack type prototypes during the cleaning operation. Specifically, the time required to complete one cleaning cycle was measured. These experiments were performed 50 times for each prototype. The statistical data were presented in the box-and-whisker plots shown in Figure 15, where the interquartile range (25–75%), mean values, and standard deviations are indicated by the boxes, X-marks, and error bars, respectively.
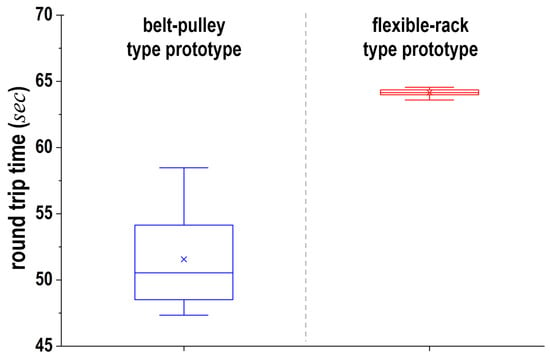
Figure 15.
Experimental comparison of round-trip operating time of drive module for belt–pulley and flexible-rack type prototypes.
A clear contrast was observed between the two prototypes. The belt–pulley type prototype exhibited a large variability in cleaning-completion time, whereas the flexible-rack type prototype showed almost no variation. These results indicated that the belt–pulley type provided unstable cleaning performance, primarily due to its limited durability. As mentioned in Section 3, this instability was mainly caused by gradual belt elongation and the resulting loss of tension during repeated cleaning cycles. Such deformation reduced the accuracy of sponge-position control and increased backlash during drive-direction reversals. Consequently, the belt–pulley type frequently deviated from the intended cleaning trajectory, making it difficult to maintain consistent performance. In contrast, the enhanced flexible-rack type prototype employed rigid structural elements, which allowed the cleaning module to maintain high positional accuracy and stable operation even under repetitive use. These results suggested that this prototype reduced user burden and mitigated concerns regarding operational instability in real-world toilet environments, thereby improving overall comfort and usability.
Although the cleaning time of the flexible-rack type prototype was slightly longer than that of the belt–pulley type prototype, this difference did not indicate a degradation in performance. As described in Section 3, the prototype intentionally incorporated a delay at each operation-switching point to ensure reliable execution of all cleaning actions. This delay functioned as a deliberate design feature to protect the mechanical components and stabilize overall operation. Consequently, the increased cleaning time was effectively utilized rather than being detrimental. Overall, the flexible-rack type prototype exhibited more stable cleaning performance compared with the belt–pulley type prototype.
Next, the sustainability of the flexible-rack type prototype during the cleaning operation was evaluated through a capacity assessment based on the remaining battery level. For these experiments, a Turnigy nano-tech 12 V lithium polymer (LiPo) battery (HobbyKing Co., Ltd., Hong Kong, China) was employed. Restrooms in public facilities such as airports and shopping malls are typically equipped with standard alternating current (AC) power outlets; therefore, the proposed prototype is designed to operate primarily on AC power rather than battery power in high-usage environments. A LiPo battery employed in this study was introduced mainly for prototype evaluation and as a backup power source in situations where AC power is unavailable, such as during emergencies or disasters. Furthermore, to ensure safety in wet environments, the entire control module, including all electrical cable connections, was encapsulated in epoxy resin to achieve waterproofing.
The assessment was conducted in intervals of 10 cycles, with the remaining battery level measured and recorded at the end of each interval. This procedure was repeated for a total of 400 cleaning cycles to analyze the long-term power consumption characteristics. The results are presented in Figure 16. Although the remaining battery capacity gradually decreased with increasing cycle count, the reduction rate remained approximately 3% per 10-cycle interval. Furthermore, about 70% of the initial battery capacity remained after 100 cycles, indicating that the developed seat-cleaning system exhibited stable operation due to a constant reduction rate.
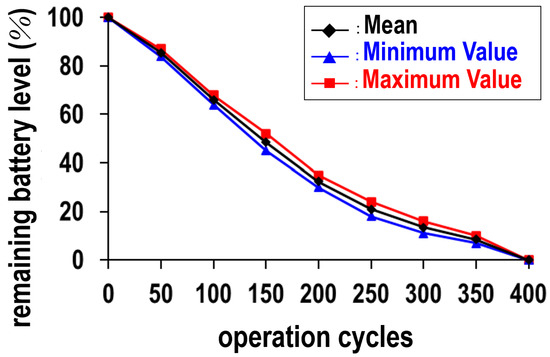
Figure 16.
Experimental results for the remaining battery level during repeated round-trip operations.
This constant power consumption was attributed to the minimal mechanical losses inherent in the flexible-rack type prototype. Unlike the previous belt–pulley design, this mechanism did not require additional torque to compensate for belt stretching or slippage, allowing stable operation with minimal energy consumption. These results further confirm that the flexible-rack prototype provides stable operating time for routine cleaning tasks, with a single battery charge supporting a predictable number of cleaning cycles and thereby eliminating the need for frequent recharging. Consequently, user burden is reduced, which is an important factor for practical implementation. Overall, compared with the belt–pulley design, the flexible-rack type prototype demonstrates superior cleaning performance and more stable power consumption, indicating clear advantages for practical deployment.
Although these experiments employed a LiPo battery to evaluate the sustainability of the seat-cleaning system, it was also confirmed that the prototype could be powered by an AC power outlet. In such a configuration, the prototype was operated by regulating the voltage and current using an AC adapter or by incorporating a voltage step-down module as required. These results indicated that, even when deployed in public facilities, the prototype was capable of supporting a large number of cleaning cycles while maintaining high power efficiency.
Finally, experiments for cleaning performance were conducted using the developed flexible-rack type prototype (see Figure 17). These experiments assessed the effectiveness of the seat-cleaning system in removing blue dried stains that had been artificially applied to the seat surface. The left side of Figure 17 shows the initial state before cleaning, while the right side shows the state after one cleaning operation. To evaluate cleaning performance, the proportion of blue pixels on the white seat was calculated before cleaning and recalculated after each cleaning operation. This procedure was repeated for the first through fourth cleaning cycles. A total of 30 different initial conditions were prepared, and the statistical results obtained from these trials are presented in Figure 18.

Figure 17.
Experimental scenes for the cleaning performance of the developed toilet seat-cleaning system.
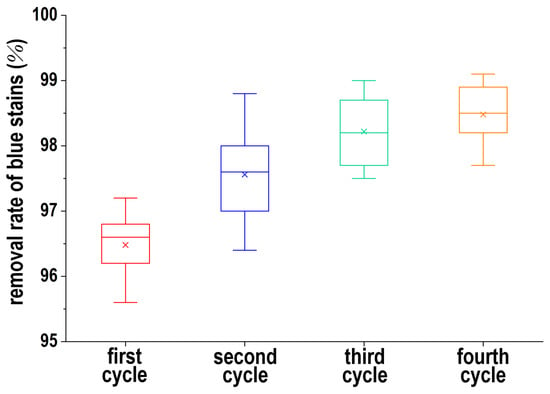
Figure 18.
Experimental results of removal rates demonstrating the cleaning performance of the developed toilet seat-cleaning system over the first through fourth cleaning cycles.
These results demonstrated that a single reciprocating cleaning cycle was sufficient to clean the entire toilet seat, with over 95% removal rate. As expected, the removal rate increased with the number of cleaning cycles; however, the incremental improvement saturated after the third cycle. These results were achieved through the stable operation of the flexible-rack mechanism in combination with the optimized attachment and sponge angles, which enabled efficient cleaning motion along the curved geometry of the seat. Furthermore, blue dried stains were observed to fall naturally into the toilet bowl during the cleaning process (see the right side in Figure 17), due to the effective use of the seat’s curved surface rather than simple surface scraping. These results confirmed the effectiveness of the proposed cleaning mechanism, which leveraged the seat geometry to guide contaminants away from the surface. Consequently, the experimental results in Figure 18 indicated that the prototype achieved a level of cleaning uniformity that had been difficult to realize with conventional toilet-cleaning robots.
Based on these evaluation experiments, the developed prototype demonstrated consistently stable cleaning performance and excellent power efficiency. These results established a solid technological foundation for practical implementation. Consequently, the effectiveness of the seat-cleaning system equipped with an automatic cleaning function was successfully validated.
4.3. Discussion
This study focused on the development of a toilet seat equipped with an automatic cleaning function. The overall concept was established around a cleaning sequence designed to minimize user burden. Based on this concept, a flexible-rack type prototype was developed. Through a series of numerical simulations and evaluation experiments, the effectiveness of the proposed prototype was verified, and it was confirmed that the prototype provided sufficient cleaning performance.
This proposed prototype is composed of commercially available stepper motors and 3D-printed components, without requiring specialized high-precision parts, resulting in low development cost. Next, the prototype mounts onto the toilet seat lid and existing seat structure without permanent modifications or additional plumbing, enabling easy deployment in existing restrooms. Finally, the sponge is treated as a consumable, and the drive module employs simple repetitive linear motion, reducing maintenance complexity and routine maintenance burden. Nevertheless, several issues remained to be addressed in order to further advance the prototype toward full practical implementation.
The primary concern is related to sponge replacement. Experimental results confirmed that the sponge maintained both its structural integrity and cleaning effectiveness even after cleaning cycles, demonstrating considerable durability. Nevertheless, periodic replacement remained necessary due to wear and hygiene considerations. In the current prototype, the sponge is reusable and thus poses a residual risk of cross-contamination; however, it is treated as a consumable and designed for easy replacement during routine maintenance to mitigate this risk. In this study, this replacement procedure was performed manually by cleaning staff. To overcome this limitation, ongoing research focuses on the development of an automatic toilet paper-based cleaning mechanism. In this idea, toilet paper is automatically cut, mounted, and used as the cleaning medium, after which the used paper is disposed of directly into the toilet bowl. Unlike a reusable sponge, the cleaning medium is replaced after each cleaning sequence, enabling the continuous maintenance of hygienic conditions. However, using the toilet paper as a cleaning medium requires precise control of winding force and speed, and its strength may degrade under wet outdoor conditions.
The second concern is related to the type of cleaning fluid used. Previous studies had shown that various bacteria and viruses could be present on toilet seat surfaces [25]. However, since the developed prototype employed only a single cleaning fluid, it was incapable of sterilizing all such microorganisms. To overcome this limitation, ongoing research focuses on developing a cleaning mechanism that utilizes a combination of cleaning fluids. By integrating multiple sensors, the system could identify the type of contamination and select the most appropriate cleaning fluid accordingly. For microorganisms and contaminants that are too fine to be detected by the sensors, a potential future approach is the integration of biological testing devices; however, this is constrained by the substantial cost increase associated with such equipment. The implementation of these two enhancements was expected to enable more advanced cleaning capabilities and substantially improve the practical applicability of the smart toilet seat.
5. Conclusions
This paper proposed a toilet seat equipped with an automatic cleaning function to realize a more hygienic toilet environment. As a first step, a cleaning-sequence concept was established with a primary emphasis on practical usability for toilet users. To implement this concept, a belt–pulley type prototype was developed. However, issues such as belt degradation and mechanical constraints related to opening and closing the toilet lid necessitated the development of a flexible-rack type prototype. The control methodology, including the electronic control circuit integrated into the prototype, was also described in detail. Using the enhanced prototype, comprehensive performance evaluations were conducted. Simulation results identified the optimal design parameters of the cleaning module, including attachment angle, sponge angle, and pressure distribution. Furthermore, extensive experiments were performed, yielding several important findings. These experiments demonstrated that the upgraded prototype achieved high durability, stable cleaning performance, and excellent power efficiency. Consequently, the effectiveness and practical feasibility of the proposed toilet seat-cleaning system were successfully validated. At present, the developed system is being integrated into an existing toilet, and user testing and evaluation are planned following completion of safety inspections. In the near future, the proposed toilet seat is expected to be installed in a wide range of public facilities where large numbers of users congregate. Furthermore, by integrating additional devices capable of detecting and recording medical information during toilet use, the application of this technology could be expanded to hospitals and elderly care facilities. Ultimately, this seat-cleaning system has the potential to contribute to the prevention of infectious diseases and to support the realization of a more hygienic and health-conscious society.
Author Contributions
Conceptualization, G.L. and K.T.; methodology, K.T. and K.O.; software, K.T., K.S. and K.O.; validation, G.L., K.T., K.S., K.O. and T.J.; formal analysis, G.L., K.T., K.O. and T.J.; investigation, G.L. and K.O.; resources, K.T., K.S. and K.O.; data curation, G.L., K.T., K.S. and K.O.; writing—original draft preparation, G.L. and K.T.; writing—review and editing, G.L., K.T., K.S., K.O. and T.J.; visualization, K.T. and K.S.; supervision, G.L. and T.J.; project administration, G.L.; funding acquisition, G.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| COVID-19 | Coronavirus Disease 2019 |
| 3D | Three-dimensional |
| PLA | Polylactic acid |
| AC | Alternating current |
| LiPo | Lithium polymer |
References
- Chu, D.K.; Akl, E.A.; Duda, S.; Solo, K.; Yaacoub, S.; Schunemann, H.J. COVID-19 Systematic Urgent Review Group Effort (SURGE) study authors. Physical distancing, face masks, and eye protection to prevent person-to-person transmission of SARS-CoV-2 and COVID-19: A systematic review and meta-analysis. Lancet 2020, 27, 1973–1987. [Google Scholar] [CrossRef] [PubMed]
- Tirachini, A.; Cats, O. COVID-19 and public transportation: Current assessment, prospects, and research needs. J. Public Transp. 2020, 22, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Ong, S.W.X.; Tan, Y.K.; Chia, P.Y.; Lee, T.H.; Ng, O.T.; Wong, M.S.Y.; Marimuthu, K. Air, surface environmental, and personal protective equipment contamination by severe acute respiratory syndrome Coronavirus 2 (SARS-CoV-2). JAMA 2020, 323, 1610–1612. [Google Scholar] [CrossRef] [PubMed]
- Abney, S.E.; Bright, K.R.; McKinney, J.; Ijaz, M.K.; Gerba, C.P. Toilet hygiene-review and research needs. J. Appl. Microbiol. 2021, 131, 2705–2714. [Google Scholar] [CrossRef] [PubMed]
- Song, Z.; Kwon, T.; Lee, J.; Won, D.D.; Lee, B.J.; Choi, H.S.; Liao, J.C.; Park, W.G.; Sonu, I.; Rogalla, S.; et al. AI-driven defecation analysis by smart healthcare toilet: Exploring biometric patterns and Eu-Tenesmus. Adv. Sci. 2025, 12, 2503247. [Google Scholar] [CrossRef] [PubMed]
- Azman, F.I.; Fazdli, M.S.F.M.; Saleh, N.L.; Noor, A.S.M.; Ali, A.M. Residential college’s smart restroom monitoring system. In Proceedings of the 2023 International Conference on Smart Applications, Communications and Networking (SmartNets), Istanbul, Turkiye, 25–27 July 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Rahman, M.M.; Hossain, G.; Challoo, R.; Rizkalla, M. iRestroom: A smart restroom cyberinfrastructure for elderly people. Internet Things 2025, 19, 100573. [Google Scholar] [CrossRef]
- Wu, J.-Y.; Lin, Y.-C.; Lee, S.-Y.; Chen, C.-P.; Cheng, S.-H.; Cheng, C.Y.; Ching, C.T.S.; Wang, H.D.; Yeh, C.C.; Chen, W.J.; et al. IoT-based hand hygiene compliance monitoring system and validation of its effectiveness in hospital environments. Glob. Chall. 2024, 8, 2400124. [Google Scholar] [CrossRef] [PubMed]
- Abdulmalek, S.; Nasir, A.; Jabbar, W.A.; Almuhaya, M.A.M.; Bairagi, A.K.; Khan, M.A.-M.; Kee, S.-H. IoT-based healthcare-monitoring system towards improving quality of life: A review. Healthcare 2022, 10, 1993. [Google Scholar] [CrossRef] [PubMed]
- Senadeera, S.D.A.P.; Kyi, S.; Sirisung, T.; Pongsupan, W.; Taparugssanagorn, A.; Dailey, M.N.; Wai, T.A. Cost-effective and low power IoT-based paper supply monitoring system: An application modeling approach. J. Low Power Electron. Appl. 2021, 11, 46. [Google Scholar] [CrossRef]
- Arjun, M.; Oliver, C.A.; Joseph, A.M. Robot vacuum cleaner using SLAM and ROS. In Proceedings of the 2024 International Conference on Knowledge Engineering and Communication Systems (ICKECS), Chikkaballapur, India, 18–19 April 2024; pp. 1–5. [Google Scholar] [CrossRef]
- Nemoto, T.; Nansai, S.; Iizuka, S.; Iwase, M.; Itoh, H. Window shape estimation for glass facade-cleaning robot. Machines 2023, 11, 175. [Google Scholar] [CrossRef]
- Chen, Y.-H. Control design and implementation of autonomous robotic lawnmower. Mathematics 2024, 12, 3324. [Google Scholar] [CrossRef]
- Mousavi, S.; Farahani, G. Introducing a new method of automatic cleaning of the PV array surface using a suction robot. Mechatronics 2022, 85, 102845. [Google Scholar] [CrossRef]
- Ren, Y.; Dong, Z. Development and research of the MOCVD cleaning robot. Machines 2025, 13, 202. [Google Scholar] [CrossRef]
- Azcarate, R.F.G.; Jayadeep, A.; Zin, A.K.; Lee, J.W.S.; Muthugala, M.A.V.J.; Elara, M.R. Adaptive outdoor cleaning robot with real-time terrain perception and fuzzy control. Machines 2025, 13, 2245. [Google Scholar] [CrossRef]
- Onyeaka, H.; Anumudu, C.K.; Al-Sharify, Z.T.; Egele-Godswill, E.; Mbaegbu, P. COVID-19 pandemic: A review of the global lockdown and its far-reaching effects. Sci. Prog. 2021, 104, 368504211019854. [Google Scholar] [CrossRef] [PubMed]
- Krishnan, R.H. A brief review on lavatory cleaning devices and their feasibility in public toilets in developing countries. Int. J. Intell. Robot. Appl. 2020, 4, 354–369. [Google Scholar] [CrossRef] [PubMed]
- Tezuka, S.; Wada, K.; Hori, A.; Shinoki, N.; Kariya, T.; Ohi, K.; Tomizawa, T.; Suzuki, T. Development of a restroom cleaning system for convenience stores. Adv. Robot. 2022, 36, 1230–1240. [Google Scholar] [CrossRef]
- Yang, P.C.; Koganti, N.; Garcia Ricardez, G.A.; Yamamoto, M.; Takamatsu, J.; Ogasawara, T. Context dependent trajectory generation using sequence-to-sequence models for robotic toilet cleaning. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; pp. 932–937. [Google Scholar] [CrossRef]
- Yeshmukhametov, A.; Baratova, A.; Salemkhan, A.; Buribayev, Z.; Ozhikenov, K.; Amirgaliyev, Y. Design and modeling of self-sustainable bathroom floor cleaning robot system. In Proceedings of the 2021 21st International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 12–15 October 2021; pp. 1860–1865. [Google Scholar] [CrossRef]
- Manikandan, S.; Afreen, H.; Vijayakanthan, G.; Harshini, M.; Ramanan, A.; Rajendran, A. Smart sanitizing toilet: A touchless, UV-disinfected and self cleaning hygiene solution. In Proceedings of the 2025 6th International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 25–27 June 2025; pp. 368–373. [Google Scholar] [CrossRef]
- Vidyalakshmi, R.; Sridharan, D.; Hariprasath, J.; Hritheekkumar, R. Automated toilet cleaning system. In Proceedings of the 2024 International Conference on IoT, Communication and Automation Technology (ICICAT), Gorakhpur, India, 23–24 November 2024. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, B.; Lai, A.C.K. Study on the air gap effect when closing toilet lid on droplet and pathogen escaping from flushing. Am. J. Infect. Control 2025. [Google Scholar] [CrossRef] [PubMed]
- Abney, S.E.; Higham, C.A.; Wilson, A.M.; Ijaz, M.K.; McKinney, J.; Reynolds, K.A.; Gerba, C.P. Transmission of viruses from restroom use: A quantitative microbial risk assessment. Food Environ. Virol. 2024, 16, 65–78. [Google Scholar] [CrossRef] [PubMed]


















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.