Natural Motion for Energy Saving in Robotic and Mechatronic Systems

 ,
,  ,
,  ,
, 

Abstract
1. Introduction
2. Mechanical Design for Natural Motion
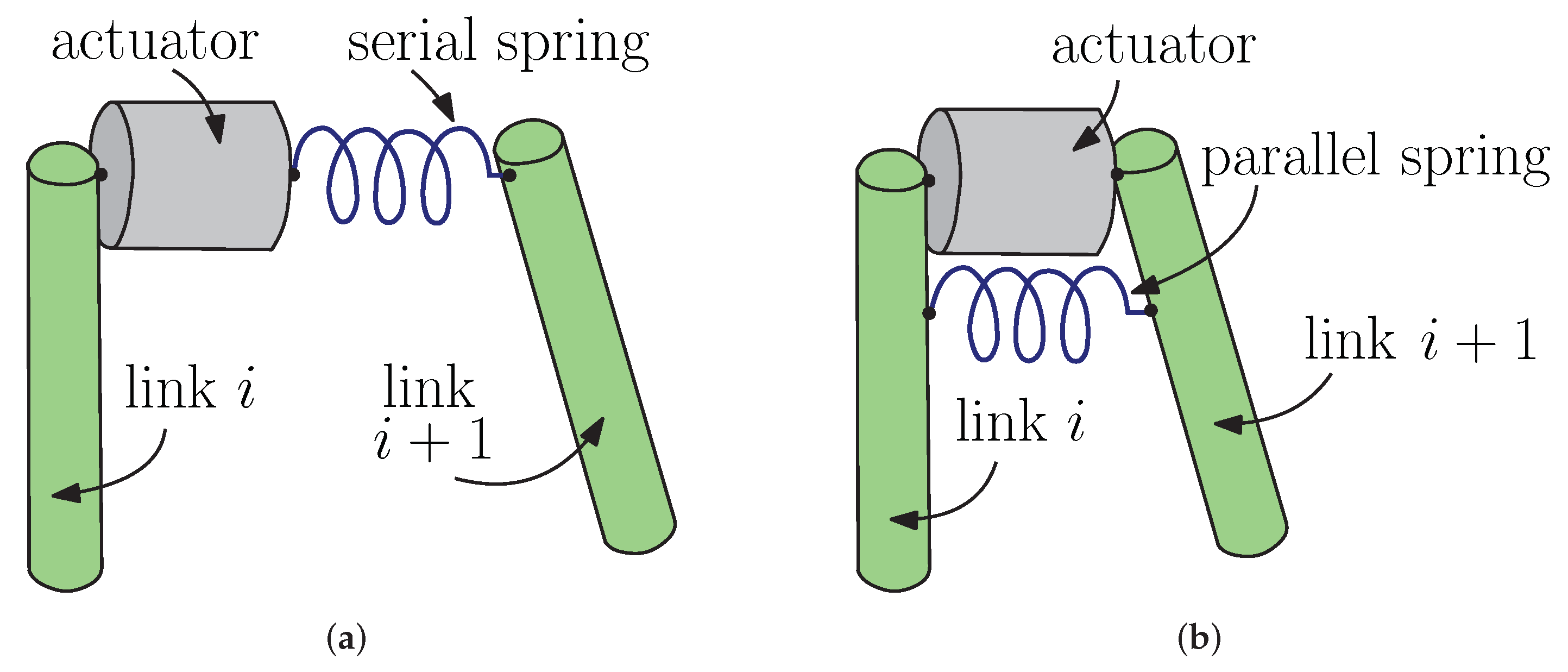
2.1. Serial Compliance Elements
2.2. Parallel Compliance Elements
2.3. Serial and Parallel Compliance Elements
2.4. Discussion of Elastic Elements Configurations
3. Design of Desired Natural Dynamics
- Defined trajectory. A feasible trajectory for the desired task (typically harmonic) is imposed and the spring parameters are optimized to minimize a given objective function related to energy consumption;
- Optimized trajectory. The spring parameters and the system trajectories are concurrently optimized thanks to a parametric representation of both or by adopting the optimal control theory;
- Free-vibration response. The trajectory is not imposed. The optimal spring parameters are identified so that the free response of the system fulfills task requirements. Such a result can be obtained by means of linearized dynamic models or multibody simulators;
- Periodic trajectory learning. The robotic system is not modified. The forced response at resonance of the system is learned by means of proper tools and used as reference trajectory.
3.1. Defined Trajectory
3.1.1. Control-Based Methods
3.1.2. Methods Based on Force-Displacement Graphs
3.1.3. Methods Based on Offline Optimization
3.2. Optimized Trajectory
3.2.1. Methods Based on the Optimal Control Theory
3.2.2. Methods Based on Parametrization through Basis Functions
3.3. Free-Vibration Response
3.4. Periodic Trajectory Learning
4. Design Optimization with Natural Motion
5. Discussion
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Brossog, M.; Bornschlegl, M.; Franke, J. Reducing the energy consumption of industrial robots in manufacturing systems. Int. J. Adv. Manuf. Technol. 2015, 78, 1315–1328. [Google Scholar]
- European Comission. Proposal for a Directive of the European Parliament and of the Council Amending Directive 2012/27/EU on Energy Efficiency (52016PC0761). 2012. Available online: https://eur-lex.europa.eu/homepage.html (accessed on 19 August 2019).
- International Federation of Robotics. Executive Summary World Robotics 2018 Industrial Robots. 2018. Available online: https://ifr.org/free-downloads/ (accessed on 19 August 2019).
- Carabin, G.; Wehrle, E.; Vidoni, R. A review on energy-saving optimization methods for robotic and automatic systems. Robotics 2017, 6, 39. [Google Scholar] [CrossRef]
- Inoue, K.; Ogata, K.; Kato, T. An effcient induction motor drive method with a regenerative power storage system driven by an optimal torque. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 359–364. [Google Scholar]
- Albu-Schäffer, A.; Haddadin, S.; Ott, C.; Stemmer, A.; Wimböck, T.; Hirzinger, G. The DLR lightweight robot: Design and control concepts for robots in human environments. Ind. Robot Int. J. 2007, 34, 376–385. [Google Scholar] [CrossRef]
- Boscariol, P.; Gallina, P.; Gasparetto, A.; Giovagnoni, M.; Scalera, L.; Vidoni, R. Evolution of a dynamic model for flexible multibody systems. In Advances in Italian Mechanism Science; Springer: Berlin, Germany, 2017; pp. 533–541. [Google Scholar]
- Vidoni, R.; Scalera, L.; Gasparetto, A.; Giovagnoni, M. Comparison of Model Order Reduction Techniques for Flexible Multibody Dynamics using an Equivalent Rigid-Link System Approach. In Proceedings of the 8th ECCOMAS Thematic Conference on Multibody Dynamics, Prague, Czech Republic, 19–22 June 2017; National Technical University of Athens: Athens, Greece, 2017. [Google Scholar]
- Lorenz, M.; Paris, J.; Schöler, F.; Barreto, J.P.; Mannheim, T.; Hüsing, M.; Corves, B. Energy-efficient trajectory planning for robot manipulators. In Proceedings of the ASME 2017 International Design Engineering Technical Conference and Computers and Information in Engineering Conference American Society of Mechanical Engineers, Cleveland, OH, USA, 6–9 August 2017. [Google Scholar]
- Carabin, G.; Vidoni, R.; Wehrle, E. Energy Saving in Mechatronic Systems Through Optimal Point-to-Point Trajectory Generation via Standard Primitives. In Proceedings of the International Conference of IFToMM ITALY, Cassino, Italy, 29–30 November 2018; Springer: Berlin, Germany, 2018; pp. 20–28. [Google Scholar]
- Boscariol, P.; Richiedei, D. Energy Saving in Redundant Robotic Cells: Optimal Trajectory Planning. In IFToMM Symposium on Mechanism Design for Robotics; Springer: Berlin, Germany, 2018; pp. 268–275. [Google Scholar]
- Trigatti, G.; Boscariol, P.; Scalera, L.; Pillan, D.; Gasparetto, A. A new path-constrained trajectory planning strategy for spray painting robots-rev. 1. Int. J. Adv. Manuf. Technol. 2018, 98, 2287–2296. [Google Scholar] [CrossRef]
- Boscariol, P.; Scalera, L.; Gasparetto, A. Task-Dependent Energetic Analysis of a 3 d.o.f. Industrial Manipulator. In Proceedings of the Advances in Service and Industrial Robotics, 28th Conference on Robotics in Alpe-Adria-Danube Region, RAAD, Kaiserslautern, Germany, 19–21 June 2019; Springer: Berlin, Germany, 2020; pp. 162–169. [Google Scholar]
- Koditschek, D. Natural motion for robot arms. In Proceedings of the The 23rd IEEE Conference on Decision and Control, Las Vegas, NV, USA, 12–14 December 1984; pp. 733–735. [Google Scholar]
- Koditschek, D.E. Adaptive strategies for the control of natural motion. In Proceedings of the 24th IEEE Conference on Decision and Control, Fort Lauderdale, FL, USA, 11–13 Decmber 1985; pp. 1405–1409. [Google Scholar]
- Goya, H.; Matsusaka, K.; Uemura, M.; Nishioka, Y.; Kawamura, S. Realization of high-energy efficient pick-and-place tasks of scara robots by resonance. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012; pp. 2730–2735. [Google Scholar]
- Boschetti, G. A picking strategy for circular conveyor tracking. J. Intell. Robot. Syst. 2016, 81, 241–255. [Google Scholar] [CrossRef]
- Bauer, F.; Fidlin, A.; Seemann, W. Energy efficient bipedal robots walking in resonance. ZAMM J. Appl. Math. Mech. Z. Für Angew. Math. Und Mech. 2014, 94, 968–973. [Google Scholar] [CrossRef]
- Della Santina, C.; Lakatos, D.; Bicchi, A.; Albu-Schäffer, A. Using nonlinear normal modes for execution of efficient cyclic motions in soft robots. arXiv 2018, arXiv:1806.08389. [Google Scholar]
- Despotovic, Z.V.; Urukalo, D.; Lecic, M.R.; Cosic, A. Mathematical modeling of resonant linear vibratory conveyor with electromagnetic excitation: simulations and experimental results. Appl. Math. Model. 2017, 41, 1–24. [Google Scholar] [CrossRef]
- Comand, N.; Boschetti, G.; Rosati, G. Vibratory Feeding of Cylindrical Parts: A Dynamic Model. In Proceedings of the International Conference of IFToMM ITALY, Cassino, Italy, 29–30 November 2018; Springer: Berlin, Germany, 2018; pp. 203–210. [Google Scholar]
- Kim, S.; Lee, J.; Yoo, C.; Song, J.; Lee, S. Design of highly uniform spool and bar horns for ultrasonic bonding. IEEE Trans. Ultrason., Ferroelectr. Freq. Control 2011, 58, 2194–2201. [Google Scholar]
- Palomba, I.; Richiedei, D.; Trevisani, A. Mode selection for reduced order modeling of mechanical systems excited at resonance. Int. J. Mech. Sci. 2016, 114, 268–276. [Google Scholar] [CrossRef]
- Belotti, R.; Richiedei, D.; Trevisani, A. Optimal Design of Vibrating Systems Through Partial Eigenstructure Assignment. J. Mech. Des. Trans. ASME 2016, 138, 071402. [Google Scholar] [CrossRef]
- Wehrle, E.; Palomba, I.; Vidoni, R. In-operation structural modification of planetary gear sets using design optimization methods. Mech. Mach. Sci. 2019, 66, 395–405. [Google Scholar]
- Babitsky, V.; Chitayev, M. Adaptive high-speed resonant robot. Mechatronics 1996, 6, 897–913. [Google Scholar] [CrossRef]
- Vidoni, R.; Scalera, L.; Gasparetto, A. 3-D ERLS based dynamic formulation for flexible-link robots: Theoretical and numerical comparison between the finite element method and the component mode synthesis approaches. Int. J. Mech. Control 2018, 19, 39–50. [Google Scholar]
- Wang, J.; Gosselin, C.M. Static balancing of spatial three-degree-of-freedom parallel mechanisms. Mech. Mach. Theory 1999, 34, 437–452. [Google Scholar] [CrossRef]
- Herder, J.L. Energy-Free Systems. Theory, Conception and Design of Statically Balanced Spring Mechanisms; Mechanical Maritime and Materials Engineering: Delft, The Netherlands, 2001; Volume 2. [Google Scholar]
- Agrawal, S.K.; Fattah, A. Reactionless space and ground robots: Novel designs and concept studies. Mech. Mach. Theory 2004, 39, 25–40. [Google Scholar] [CrossRef]
- Agrawal, A.; Agrawal, S.K. Design of gravity balancing leg orthosis using non-zero free length springs. Mech. Mach. Theory 2005, 40, 693–709. [Google Scholar] [CrossRef]
- Briot, S.; Baradat, C.; Guégan, S.; Arakelian, V. Contribution to the mechanical behavior improvement of the robotic navigation device Surgiscope. In Proceedings of the ASME 2007 International Design Engineering Technical Conference and Computers and Information in Engineering Conference American Society of Mechanical Engineers, Las Vegas, NV, USA, 4–7 September 2007; pp. 653–661. [Google Scholar]
- Baradat, C.; Arakelian, V.; Briot, S.; Guegan, S. Design and prototyping of a new balancing mechanism for spatial parallel manipulators. J. Mech. Des. 2008, 130, 072305. [Google Scholar] [CrossRef]
- Briot, S.; Arakelian, V. A new energy-free gravity-compensation adaptive system for balancing of 4-DOF robot manipulators with variable payloads. In Proceedings of the 14th International Federation for the Promotion of Mechanism and Machine Science World Congress (2015 IFToMM World Congress), Taipei, Taiwan, 25–30 October 2015. [Google Scholar]
- Veer, S.; Sujatha, S. Approximate spring balancing of linkages to reduce actuator requirements. Mech. Mach. Theory 2015, 86, 108–124. [Google Scholar] [CrossRef]
- Pratt, G.A.; Williamson, M.M. Series elastic actuators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Pittsburgh, PA, USA, 5–9 August 1995; Volume 1, pp. 399–406. [Google Scholar]
- Pratt, J.; Chew, C.M.; Torres, A.; Dilworth, P.; Pratt, G. Virtual model control: An intuitive approach for bipedal locomotion. Int. J. Robot. Res. 2001, 20, 129–143. [Google Scholar] [CrossRef]
- Bolívar, E.; Rezazadeh, S.; Gregg, R. A General Framework for Minimizing Energy Consumption of Series Elastic Actuators with Regeneration. In Proceedings of the ASME Dynamic Systems and Control Conference American Society of Mechanical Engineers, Tysons, VA, USA, 11–13 October 2017. [Google Scholar]
- Bolívar, E.; Rezazadeh, S.; Gregg, R. Minimizing Energy Consumption and Peak Power of Series Elastic Actuators: A Convex Optimization Framework for Elastic Element Design. IEEE/ASME Trans. Mechatron. 2019, 23, 1334–1345. [Google Scholar] [CrossRef]
- Jimenez-Fabian, R.; Weckx, M.; Rodriguez-Cianca, D.; Lefeber, D.; Vanderborght, B. Online Reconfiguration of a Variable-Stiffness Actuator. IEEE/ASME Trans. Mechatron. 2018, 23, 1866–1876. [Google Scholar] [CrossRef]
- Ham, R.V.; Sugar, T.G.; Vanderborght, B.; Hollander, K.W.; Lefeber, D. Compliant actuator designs. IEEE Robot. Autom. Mag. 2009, 16, 81–94. [Google Scholar] [CrossRef]
- Vanderborght, B.; Albu-Schäffer, A.; Bicchi, A.; Burdet, E.; Caldwell, D.G.; Carloni, R.; Catalano, M.; Eiberger, O.; Friedl, W.; Ganesh, G.; et al. Variable impedance actuators: A review. Robot. Auton. Syst. 2013, 61, 1601–1614. [Google Scholar] [CrossRef]
- Beckerle, P.; Wojtusch, J.; Rinderknecht, S.; von Stryk, O. Analysis of system dynamic influences in robotic actuators with variable stiffness. Smart Struct. Syst. 2014, 13, 711–730. [Google Scholar] [CrossRef]
- Wolf, S.; Grioli, G.; Eiberger, O.; Friedl, W.; Grebenstein, M.; Höppner, H.; Burdet, E.; Caldwell, D.G.; Carloni, R.; Catalano, M.G.; et al. Variable stiffness actuators: Review on design and components. IEEE/ASME Trans. Mechatron. 2016, 21, 2418–2430. [Google Scholar] [CrossRef]
- Guo, J.; Tian, G. Conceptual design and analysis of four types of variable stiffness actuators based on spring pretension. Int. J. Adv. Robot. Syst. 2015, 12, 62. [Google Scholar] [CrossRef]
- Tsagarakis, N.G.; Laffranchi, M.; Vanderborght, B.; Caldwell, D.G. A compact soft actuator unit for small scale human friendly robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 4356–4362. [Google Scholar]
- Beckerle, P.; Stuhlenmiller, F.; Rinderknecht, S. Stiffness Control of Variable Serial Elastic Actuators: Energy Efficiency through Exploitation of Natural Dynamics. Actuators 2017, 6, 282017. [Google Scholar]
- Van Ham, R.; Vanderborght, B.; Van Damme, M.; Verrelst, B.; Lefeber, D. MACCEPA, the mechanically adjustable compliance and controllable equilibrium position actuator: Design and implementation in a biped robot. Robot. Auton. Syst. 2007, 55, 761–768. [Google Scholar] [CrossRef]
- Vanderborght, B.; Van Ham, R.; Verrelst, B.; Van Damme, M.; Lefeber, D. Overview of the lucy project: Dynamic stabilization of a biped powered by pneumatic artificial muscles. Adv. Robot. 2008, 22, 1027–1051. [Google Scholar] [CrossRef]
- Jafari, A.; Tsagarakis, N.G.; Caldwell, D.G. Exploiting natural dynamics for energy minimization using an Actuator with Adjustable Stiffness (AwAS). In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 4632–4637. [Google Scholar]
- Jafari, A.; Tsagarakis, N.G.; Caldwell, D.G. AwAS-II: A new actuator with adjustable stiffness based on the novel principle of adaptable pivot point and variable lever ratio. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 4638–4643. [Google Scholar]
- Jafari, A.; Tsagarakis, N.G.; Caldwell, D.G. A novel intrinsically energy efficient actuator with adjustable stiffness (AwAS). IEEE/ASME Trans. Mechatron. 2013, 18, 355–365. [Google Scholar] [CrossRef]
- Haeufle, D.F.B.; Taylor, M.D.; Schmitt, S.; Geyer, H. A clutched parallel elastic actuator concept: Towards energy efficient powered legs in prosthetics and robotics. In Proceedings of the 4th IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 1614–1619. [Google Scholar]
- Toxiri, S.; Calanca, A.; Ortiz, J.; Fiorini, P.; Caldwell, D.G. A Parallel-Elastic Actuator for a Torque-Controlled Back-Support Exoskeleton. IEEE Robot. Autom. Lett. 2018, 3, 492–499. [Google Scholar] [CrossRef]
- Batts, Z.; Kim, J.; Yamane, K. Design of a hopping mechanism using a voice coil actuator: Linear elastic actuator in parallel (LEAP). In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 655–660. [Google Scholar]
- Iwamura, M.; Schiehlen, W. Minimum control energy in multibody systems using gravity and springs. J. Syst. Des. Dyn. 2011, 5, 474–485. [Google Scholar] [CrossRef]
- Uemura, M.; Matsusaka, K.; Takagi, Y.; Kawamura, S. A stiffness adjustment mechanism maximally utilizing elastic energy of a linear spring for a robot joint. Adv. Robot. 2015, 29, 1331–1337. [Google Scholar] [CrossRef]
- Nasiri, R.; Khoramshahi, M.; Shushtari, M.; Ahmadabadi, M.N. Adaptation in variable parallel compliance: Towards energy efficiency in cyclic tasks. IEEE/ASME Trans. Mechatron. 2017, 22, 1059–1070. [Google Scholar] [CrossRef]
- Wolf, S.; Hirzinger, G. A new variable stiffness design: Matching requirements of the next robot generation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 19–23 May 2008; pp. 1741–1746. [Google Scholar]
- Schmit, N.; Okada, M. Synthesis of a non-circular cable spool to realize a nonlinear rotational spring. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 762–767. [Google Scholar]
- Schmit, N.; Okada, M. Optimal design of nonlinear springs in robot mechanism: Simultaneous design of trajectory and spring force profiles. Adv. Robot. 2013, 27, 33–46. [Google Scholar] [CrossRef]
- Plooij, M.; Wisse, M. A novel spring mechanism to reduce energy consumption of robotic arms. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012; pp. 2901–2908. [Google Scholar]
- Jalaly Bidgoly, H.; Nili Ahmadabadi, M.; Zakerzadeh, M.R. Design and modeling of a compact rotational nonlinear spring. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, South Korea, 9–14 October 2016; pp. 4356–4361. [Google Scholar]
- Schiehlen, W.; Guse, N. Control of Limit Cycle Oscillations. In IUTAM Symposium on Chaotic Dynamics and Control of Systems and Processes in Mechanics; Springer: Berlin, Germany, 2005; pp. 429–439. [Google Scholar]
- Khoramshahi, M.; Parsa, A.; Ijspeert, A.; Ahmadabadi, M.N. Natural dynamics modification for energy efficiency: A data-driven parallel compliance design method. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2412–2417. [Google Scholar]
- Scalera, L.; Gallina, P.; Seriani, S.; Gasparetto, A. Cable-Based Robotic Crane (CBRC): Design and Implementation of Overhead Traveling Cranes Based on Variable Radius Drums. IEEE Trans. Robot. 2018, 34, 474–485. [Google Scholar] [CrossRef]
- Kim, B.; Deshpande, A.D. Design of Nonlinear Rotational Stiffness Using a Noncircular Pulley-Spring Mechanism. J. Mech. Robot. 2014, 6. [Google Scholar] [CrossRef]
- Kumamoto, M.; Oshima, T.; Fujikawa, T. Bi-articular muscle as a principle keyword for biomimetic motor link system. In Proceedings of the 2nd Annual International IEEE-EMBS Special Topic Conference on Microtechnologies in Medicine and Biology, Madison, WI, USA, 2–4 May 2002; pp. 346–351. [Google Scholar]
- Bipedal walking and running with spring-like biarticular muscles. J. Biomech. 2008, 41, 656–667. [CrossRef]
- Hosoda, K.; Takayama, H.; Takuma, T. Bouncing monopod with bio-mimetic muscular-skeleton system. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, 22–26 September 2008; pp. 3083–3088. [Google Scholar]
- Eslamy, M.; Grimmer, M.; Seyfarth, A. Adding passive biarticular spring to active mono-articular foot prosthesis: Effects on power and energy requirement. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 677–684. [Google Scholar]
- Lu, G.; Kawamura, S.; Uemura, M. Proposal of an energy saving control method for SCARA robots. J. Robot. Mechatron. 2012, 24, 115–122. [Google Scholar] [CrossRef]
- Bidgoly, H.J.; Parsa, A.; Yazdanpanah, M.J.; Ahmadabadi, M.N. Benefiting From Kinematic Redundancy Alongside Mono-and Biarticular Parallel Compliances for Energy Efficiency in Cyclic Tasks. IEEE Trans. Robot. 2017, 33, 1088–1102. [Google Scholar] [CrossRef]
- Mathijssen, G.; Lefeber, D.; Vanderborght, B. Variable recruitment of parallel elastic elements: Series–parallel elastic actuators (SPEA) with dephased mutilated gears. IEEE/ASME Trans. Mechatron. 2015, 20, 594–602. [Google Scholar] [CrossRef]
- Tsagarakis, N.G.; Dallali, H.; Negrello, F.; Roozing, W.; Medrano-Cerda, G.A.; Caldwell, D.G. Compliant antagonistic joint tuning for gravitational load cancellation and improved efficient mobility. In Proceedings of the 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Madrid, Spain, 18–20 November 2014; pp. 924–929. [Google Scholar]
- Roozing, W.; Li, Z.; Medrano-Cerda, G.A.; Caldwell, D.G.; Tsagarakis, N.G. Development and control of a compliant asymmetric antagonistic actuator for energy efficient mobility. IEEE/ASME Trans. Mechatron. 2016, 21, 1080–1091. [Google Scholar] [CrossRef]
- Uemura, M.; Kanaoka, K.; Kawamura, S. A new control method utilizing stiffness adjustment of mechanical elastic elements for serial link systems. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Roma, Italy, 10–14 April 2007; pp. 1437–1442. [Google Scholar]
- Uemura, M.; Goya, H.; Kawamura, S. Motion control with stiffness adaptation for torque minimization in multijoint robots. IEEE Trans. Robot. 2014, 30, 352–364. [Google Scholar] [CrossRef]
- Velasco, A.; Garabini, M.; Catalano, M.G.; Bicchi, A. Soft actuation in cyclic motions: Stiffness profile optimization for energy efficiency. In Proceedings of the IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Korea, 3–5 November 2015; pp. 107–113. [Google Scholar]
- Hill, R.B.; Briot, S.; Chriette, A.; Martinet, P. Increasing Energy Efficiency of High-Speed Parallel Robots by Using Variable Stiffness Springs and Optimal Motion Generation. In Proceedings of the ASME 2018 International Design Engineering Technical Conference and Computers and Information in Engineering Conference American Society of Mechanical Engineers, Quebec City, Canada, 26–29 August 2018. [Google Scholar]
- Barreto, J.P.; Corves, B. Matching the Free-Vibration Response of a Delta Robot with Pick-and-Place Tasks Using Multi-Body Simulation. In Proceedings of the 14th International Conference on Automation Science and Engineering (CASE), Munich, Germany, 20–24 August 2018; pp. 1487–1492. [Google Scholar]
- Mirz, C.; Schöler, F.; Barreto, J.P.; Corves, B. Optimal Control Based Path Planning for Parallel Kinematic Manipulators Utilising Natural Motion. In Proceedings of the IEEE 14th International Conference on Automation Science and Engineering (CASE), Munich, Germany, 20–24 August 2018; pp. 223–228. [Google Scholar]
- Nasiri, R.; Khoramshahi, M.; Ahmadabadi, M.N. Design of a nonlinear adaptive natural oscillator: Towards natural dynamics exploitation in cyclic tasks. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 3653–3658. [Google Scholar]
- Grimmer, M.; Eslamy, M.; Gliech, S.; Seyfarth, A. A comparison of parallel-and series elastic elements in an actuator for mimicking human ankle joint in walking and running. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 2463–2470. [Google Scholar]
- Tagliamonte, N.L.; Sergi, F.; Accoto, D.; Carpino, G.; Guglielmelli, E. Double actuation architectures for rendering variable impedance in compliant robots: A review. Mechatronics 2012, 22, 1187–1203. [Google Scholar] [CrossRef]
- Velasco, A.; Gasparri, G.M.; Garabini, M.; Malagia, L.; Salaris, P.; Bicchi, A. Soft-actuators in cyclic motion: Analytical optimization of stiffness and pre-load. In Proceedings of the 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Atlanta, GA, USA, 15–17 October 2013; pp. 354–361. [Google Scholar]
- Verstraten, T.; Beckerle, P.; Furnémont, R.; Mathijssen, G.; Vanderborght, B.; Lefeber, D. Series and parallel elastic actuation: Impact of natural dynamics on power and energy consumption. Mech. Mach. Theory 2016, 102, 232–246. [Google Scholar] [CrossRef]
- Beckerle, P.; Verstraten, T.; Mathijssen, G.; Furnémont, R.; Vanderborght, B.; Lefeber, D. Series and parallel elastic actuation: Influence of operating positions on design and control. IEEE/ASME Trans. Mechatron. 2017, 22, 521–529. [Google Scholar] [CrossRef]
- Boscariol, P.; Boschetti, G.; Gallina, P.; Passarini, C. Spring Design for Motor Torque Reduction in Articulated Mechanisms. In Proceedings of the International Conference on Robotics in Alpe-Adria Danube Region, Turin, Italy, 21–23 June 2017; Springer: Berlin, Germany, 2017; pp. 557–564. [Google Scholar]
- Carabin, G.; Palomba, I.; Wehrle, E.; Vidoni, R. Energy Expenditure Minimization for a Delta-2 Robot Through a Mixed Approach. Comput. Methods Appl. Sci. 2020, 53, 383–390. [Google Scholar] [CrossRef]
- Hill, R.B.; Briot, S.; Chriette, A.; Martinet, P. Minimizing Input Torques of a High-Speed Five-Bar Mechanism by Using Variable Stiffness Springs. In ROMANSY 22, Robot Design, Dynamics and Control; Springer: Berlin, Germany, 2019; pp. 61–68. [Google Scholar]
- Lu, G.; Kawamura, S.; Uemura, M. Inertia Adaptive Control Based on Resonance for Energy Saving of Mechanical Systems. SICE J. Control Meas. Syst. Integr. 2012, 5, 109–114. [Google Scholar] [CrossRef]
- Matsusaka, K.; Uemura, M.; Kawamura, S. Realization of highly energy efficient pick-and-place tasks using resonance-based robot motion control. Adv. Robot. 2016, 30, 608–620. [Google Scholar] [CrossRef]
- Matsusaka, K.; Uemura, M.; Kawamura, S. Highly Energy-Efficient Palletizing Tasks Using Resonance-Based Robot Motion Control. J. Mech. Eng. Autom. 2016, 6, 8–17. [Google Scholar]
- Schiehlen, W.; Guse, N. Powersaving Control of Mechanisms. In Proceedings of the IUTAM Symposium on Vibration Control of Nonlinear Mechanisms and Structures, Munich, Germany, 18–22 July 2005; Springer: Berlin, Germany, 2005; pp. 277–286. [Google Scholar]
- Shushtari, M.; Nasiri, R.; Yazdanpanah, M.J.; Ahmadabadi, M.N. Compliance and frequency optimization for energy efficiency in cyclic tasks. Robotica 2017, 35, 2363–2380. [Google Scholar] [CrossRef]
- Uemura, M.; Lu, G.; Kawamura, S.; Ma, S. Passive periodic motions of multi-joint robots by stiffness adaptation and DFC for energy saving. In Proceedings of the SICE Annual Conference, Tokyo, Japan, 20–22 August 2008; pp. 2853–2858. [Google Scholar]
- Uemura, M.; Kawamura, S. An energy saving control method of robot motions based on adaptive stiffness optimization-cases of multi-frequency components. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, 22–26 September 2008; pp. 551–557. [Google Scholar]
- Uemura, M.; Kawamura, S. Resonance-based motion control method for multi-joint robot through combining stiffness adaptation and iterative learning control. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 1543–1548. [Google Scholar]
- Iwamura, M.; Imafuku, S.; Kawamoto, T.; Schiehlen, W. Design and Control of an Energy-Saving Robot Using Storage Elements and Reaction Wheels. In Multibody Dynamics; Springer: Berlin, Germany, 2016; pp. 277–297. [Google Scholar]
- Schiehlen, W.; Iwamura, M. Minimum energy control of multibody systems utilizing storage elements. In Proceedings of the ASME International Design Engineering Technical Conference and Computers and Information in Engineering Conference American Society of Mechanical Engineers, San Diego, CA, USA, 30 August–2 September 2009; pp. 1919–1926. [Google Scholar]
- Schmit, N.; Okada, M. Simultaneous optimization of robot trajectory and nonlinear springs to minimize actuator torque. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 2806–2811. [Google Scholar]
- Barreto, J.; Schöler, F.F.; Corves, B. The concept of natural motion for pick and place operations. In New Advances in Mechanisms, Mechanical Transmissions and Robotics; Springer: Berlin, Germany, 2017; pp. 89–98. [Google Scholar]
- Kashiri, N.; Spyrakos-Papastavridis, E.; Caldwell, D.G.; Tsagarakis, N.G. Exploiting the natural dynamics of compliant joint robots for cyclic motions. In Proceedings of the 22nd International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 28–31 August 2017; pp. 676–681. [Google Scholar]
- Khoramshahi, M.; Nasiri, R.; Shushtari, M.; Ijspeert, A.J.; Ahmadabadi, M.N. Adaptive Natural Oscillator to exploit natural dynamics for energy efficiency. Robot. Auton. Syst. 2017, 97, 51–60. [Google Scholar] [CrossRef]
- Noorani, M.S.; Ghanbari, A.; Jafarizadeh, M.A. Using the adaptive frequency nonlinear oscillator for earning an energy efficient motion pattern in a leg-like stretchable pendulum by exploiting the resonant mode. Amirkabir Int. J. Model. Identif. Simul. Control 2013, 45, 47–54. [Google Scholar]
- Ruder, S. An overview of gradient descent optimization algorithms. arXiv 2016, arXiv:1609.04747. [Google Scholar]
- Morrison, D.D.; Riley, J.D.; Zancanaro, J.F. Multiple Shooting Method for Two-point Boundary Value Problems. Commun. ACM 1962, 5, 613–614. [Google Scholar] [CrossRef]
- Buchli, J.; Righetti, L.; Ijspeert, A.J. A dynamical systems approach to learning: A frequency-adaptive hopper robot. In Proceedings of the European Conference on Artificial Life, Canterbury, UK, 5–9 September 2005; Springer: Berlin, Germany, 2005; pp. 210–220. [Google Scholar]
- Buchli, J.; Iida, F.; Ijspeert, A.J. Finding resonance: Adaptive frequency oscillators for dynamic legged locomotion. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Beijing, China, 9–15 October 2006; pp. 3903–3909. [Google Scholar]
- Ijspeert, A.J. Central pattern generators for locomotion control in animals and robots: A review. Neural Netw. 2008, 21, 642–653. [Google Scholar] [CrossRef]
- Righetti, L.; Buchli, J.; Ijspeert, A.J. Dynamic hebbian learning in adaptive frequency oscillators. Phys. D Nonlinear Phenom. 2006, 216, 269–281. [Google Scholar] [CrossRef]
- Righetti, L.; Buchli, J.; Ijspeert, A.J. Adaptive frequency oscillators and applications. Open Cybern. Syst. J. 2009, 3, 64–69. [Google Scholar] [CrossRef]
- Palomba, I.; Richiedei, D.; Trevisani, A. Reduced-order observers for nonlinear state estimation in flexible multibody systems. Shock Vib. 2018, 2018. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | 1st Author | Year | Path and Trajectory Planning | Compliance of Elastic Elements |
|---|---|---|---|---|
| Defined trajectory | ||||
| [89] | Boscariol | 2017 | cycloidal, 5-degree polynomial trajectory | linear parallel |
| [90] | Carabin | 2019 | double-S speed profile | linear parallel |
| [40] | Fabian | 2018 | harmonic trajectory | variable parallel |
| [16] | Goya | 2012 | harmonic trajectory | variable parallel (mono- and bi-articular) |
| [91] | Hill | 2019 | adjustment of limit cycle | variable parallel |
| [65] | Khoramshahi | 2014 | circular path in the operational space | non-linear variable parallel |
| [92] | Lu | 2012 | desired motion given | linear parallel |
| [72] | Lu | 2012 | harmonic trajectory | variable parallel |
| [93] | Matsusaka | 2016 | desired motion given | variable parallel |
| [94] | Matsusaka | 2016 | harmonic trajectory | variable parallel |
| [58] | Nasiri | 2017 | harmonic trajectory | linear and non-linear variable parallel |
| [64] | Scheilen | 2005 | harmonic trajectory | linear and non-linear parallel |
| [95] | Scheilen | 2005 | harmonic trajectory | linear parallel |
| [96] | Shushtari | 2017 | sinusoidal path given | non-linear parallel |
| [77] | Uemura | 2007 | harmonic trajectory | variable parallel |
| [97] | Uemura | 2008 | harmonic trajectory | variable parallel |
| [98] | Uemura | 2008 | harmonic trajectory | variable parallel |
| [99] | Uemura | 2009 | harmonic trajectory | variable parallel |
| [78] | Uemura | 2014 | harmonic trajectory | variable parallel |
| [86] | Velasco | 2013 | harmonic trajectory | linear serial/parallel |
| [79] | Velasco | 2015 | squared trajectory | linear and variable serial |
| Optimized trajectory | ||||
| [73] | Bidgoly | 2017 | cyclic end-effector path given | non-linear parallel (mono- and bi-articular) |
| [80] | Hill | 2018 | polynomial trajectories for robot and variable stiffness springs | variable parallel |
| [56] | Iwamura | 2011 | trajectory optimization | linear parallel |
| [100] | Iwamura | 2016 | trajectory optimization | linear parallel |
| [82] | Mirz | 2018 | optimal control theory path planning | linear parallel |
| [101] | Scheilen | 2009 | trajectory optimization | linear parallel |
| [102] | Schmit | 2012 | trajectory discretized in the joint space | non-linear parallel |
| [61] | Schmit | 2013 | trajectory discretized in the joint space | non-linear parallel |
| Free-vibration response | ||||
| [103] | Barreto | 2017 | defined by the multibody simulator | linear parallel |
| [81] | Barreto | 2018 | defined by the multibody simulator | linear parallel |
| [104] | Kashiri | 2017 | periodic motion defined by the natural frequency | variable serial |
| Periodic trajectory learning | ||||
| [105] | Khoramshahi | 2017 | harmonic trajectory | linear/variable parallel |
| [83] | Nasiri | 2016 | sinusoidal, polynomial and sign basis functions | linear parallel |
| [106] | Noorani | 2013 | motion defined by the pendulum | linear, applied at pendulum tip |
| Ref. | 1st Author | Year | Design Variables | Objective Function | Optimization Constraints | Algorithm | Results |
|---|---|---|---|---|---|---|---|
| Spring parameters | |||||||
| [81] | Barreto | 2018 | stiffness and equilibrium position | position and velocity errors | bounded unconstrained | trust-region-dogleg | 100% of torque reduction (numerical) |
| [89] | Boscariol | 2017 | stiffness and location of spring connecting points | torque norm | bounded unconstrained | MATLAB fmincon | 47% (numerical) and 32% (experimental) of peak torque reduction |
| [90] | Carabin | 2019 | stiffness and equilibrium position | electrical energy | bounded unconstrained | second-order NLPQLP | up to 70% of energy reduction (numerical) |
| [91] | Hill | 2019 | coordinates of variable stiffness spring | position and velocity errors | bounded unconstrained | shooting method | 53% of input torques reduction (numerical) |
| [40] | Fabian | 2018 | configuration of variable stiffness actuator | maximum absolute energy per cycle | bounded unconstrained | gradient descent | - |
| [65] | Khoramshahi | 2014 | stiffness and equilibrium position | absolute mechanical work | unbounded | analytical solution | 75% of energy reduction (numerical) |
| [98] | Uemura | 2008 | stiffness | torque norm | unbounded | control method | up to 55% of torque reduction (numerical) |
| [99] | Uemura | 2009 | stiffness | torque | unbounded | control method | 90% of torque reduction (numerical) |
| [86] | Velasco | 2013 | stiffness and equilibrium position | squared-power; squared-torque | task position, velocity and acceleration | analytical solution | up to 90% of cost function reduction (numerical) |
| [79] | Velasco | 2015 | stiffness profile | squared-torque and force needed for stiffness variation | task position, velocity and acceleration | analytical solution | 17% of cost function reduction (experimental) |
| Trajectory parameters | |||||||
| [73] | Bidgoly | 2017 | coefficients of torque profile | weighted sum of actuator torque and complexity of torque profiles | end-effector path, physical limitations on joints and motion periodicity | MATLAB interior-point | up to 99.9% of actuator cost reduction (numerical) |
| [82] | Mirz | 2018 | motion profile | energy | bounded unconstrained | optimal control theory | up to 84% of energy reduction (numerical) |
| [58] | Nasiri | 2017 | non-linear compliance parameters | actuation force | bounded unconstrained | Newton gradient descent | 100% (numerical) and 24% (experimental) of energy reduction |
| Spring and trajectory parameters | |||||||
| [103] | Barreto | 2017 | stiffness, equilibrium position and operating time | task time and position errors | bounded unconstrained | Nelder-Mead direct search | up to 68% of energy reduction (numerical) |
| [80] | Hill | 2018 | variable stiffness spring and trajectory parameters | power losses of joints and variable stiffness spring motors | bounded unconstrained | MATLAB fmincon | 48% of energy reduction (numerical) |
| [56] | Iwamura | 2011 | stiffness, equilibrium position and operating time | energy | bounded unconstrained | optimal control theory | up to 100% of energy reduction (numerical) |
| [100] | Iwamura | 2016 | stiffness, equilibrium position and operating time | energy | bounded unconstrained | optimal control theory | 94% of energy reduction (experimental) |
| [101] | Scheilen | 2009 | stiffness, equilibrium position and operating time | energy | bounded unconstrained | optimal control theory | up to 100% of energy reduction (numerical) |
| [102] | Schmit | 2012 | trajectory and torque profiles of non-linear springs | torque | function trajectory parameters at starting and ending time | SQP | up to 99% of actuators torque reduction (numerical) |
| [61] | Schmit | 2013 | trajectory and torque profiles of non-linear springs | torque | stiffness characteristic | SQP | up to 95% of actuators torque reduction (numerical) |
| [96] | Shushtari | 2017 | stiffness and task frequency | total energy | bounded unconstrained | analytical solution | - |
| Mechanical System | Gravity | Experimental Tests | Ref. | 1st Author | Year |
|---|---|---|---|---|---|
| 1-DOF revolute joint | [7] | Boscariol | 2017 | ||
| ✓ | [40] | Fabian | 2018 | ||
| ✓ | [105] | Khoramshahi | 2017 | ||
| ✓ | ✓ | [58] | Nasiri | 2017 | |
| ✓ | [56] | Iwamura | 2011 | ||
| ✓ | [77] | Uemura | 2007 | ||
| ✓ | [98] | Uemura | 2008 | ||
| ✓ | [86] | Velasco | 2013 | ||
| ✓ | ✓ | [79] | Velasco | 2015 | |
| 2-DOF planar robot (RR) | ✓ | [40] | Fabian | 2018 | |
| ✓ | [56] | Iwamura | 2011 | ||
| ✓ | [100] | Iwamura | 2016 | ||
| ✓ | [104] | Kashiri | 2017 | ||
| ✓ | ✓ | [94] | Matsusaka | 2016 | |
| ✓ | [93] | Matsusaka | 2016 | ||
| ✓ | [58] | Nasiri | 2017 | ||
| [64] | Schiehlen | 2005 | |||
| [95] | Schiehlen | 2005 | |||
| [101] | Schiehlen | 2009 | |||
| ✓ | [96] | Shushtari | 2017 | ||
| ✓ | [77] | Uemura | 2007 | ||
| ✓ | [97] | Uemura | 2008 | ||
| ✓ | ✓ | [99] | Uemura | 2009 | |
| [78] | Uemura | 2014 | |||
| ✓ | [86] | Velasco | 2013 | ||
| [79] | Velasco | 2015 | |||
| 2-DOF planar robot (PP) | ✓ | [96] | Shushtari | 2017 | |
| 3-DOF SCARA | ✓ | [16] | Goya | 2012 | |
| 3-DOF planar robot (RRR) | ✓ | [73] | Bidgoly | 2017 | |
| 3-DOF spatial robot (RRR) | ✓ | [102] | Schmit | 2012 | |
| ✓ | [61] | Schmit | 2013 | ||
| 3-DOF spherical robot (RRP) | ✓ | [96] | Shushtari | 2017 | |
| 4-DOF spatial robot (RRRR) | ✓ | [73] | Bidgoly | 2017 | |
| Slider-crank mechanism | [95] | Schielen | 2005 | ||
| Five-bar linkages | [103] | Barretto | 2017 | ||
| ✓ | [80] | Hill | 2018 | ||
| ✓ | [91] | Hill | 2019 | ||
| [82] | Mirz | 2018 | |||
| Delta-2 robot | ✓ | [90] | Carabin | 2019 | |
| Delta robot | ✓ | [81] | Barretto | 2018 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Scalera, L.; Palomba, I.; Wehrle, E.; Gasparetto, A.; Vidoni, R. Natural Motion for Energy Saving in Robotic and Mechatronic Systems. Appl. Sci. 2019, 9, 3516. https://doi.org/10.3390/app9173516
Scalera L, Palomba I, Wehrle E, Gasparetto A, Vidoni R. Natural Motion for Energy Saving in Robotic and Mechatronic Systems. Applied Sciences. 2019; 9(17):3516. https://doi.org/10.3390/app9173516
Chicago/Turabian StyleScalera, Lorenzo, Ilaria Palomba, Erich Wehrle, Alessandro Gasparetto, and Renato Vidoni. 2019. "Natural Motion for Energy Saving in Robotic and Mechatronic Systems" Applied Sciences 9, no. 17: 3516. https://doi.org/10.3390/app9173516
APA StyleScalera, L., Palomba, I., Wehrle, E., Gasparetto, A., & Vidoni, R. (2019). Natural Motion for Energy Saving in Robotic and Mechatronic Systems. Applied Sciences, 9(17), 3516. https://doi.org/10.3390/app9173516