Modeling the Accuracy of Estimating a Neighbor’s Evolving Position in VANET



Abstract
1. Introduction
- We establish the first analytic model for expressing an estimation error of a neighbor’s evolving position to evaluate the accuracy of the estimation.
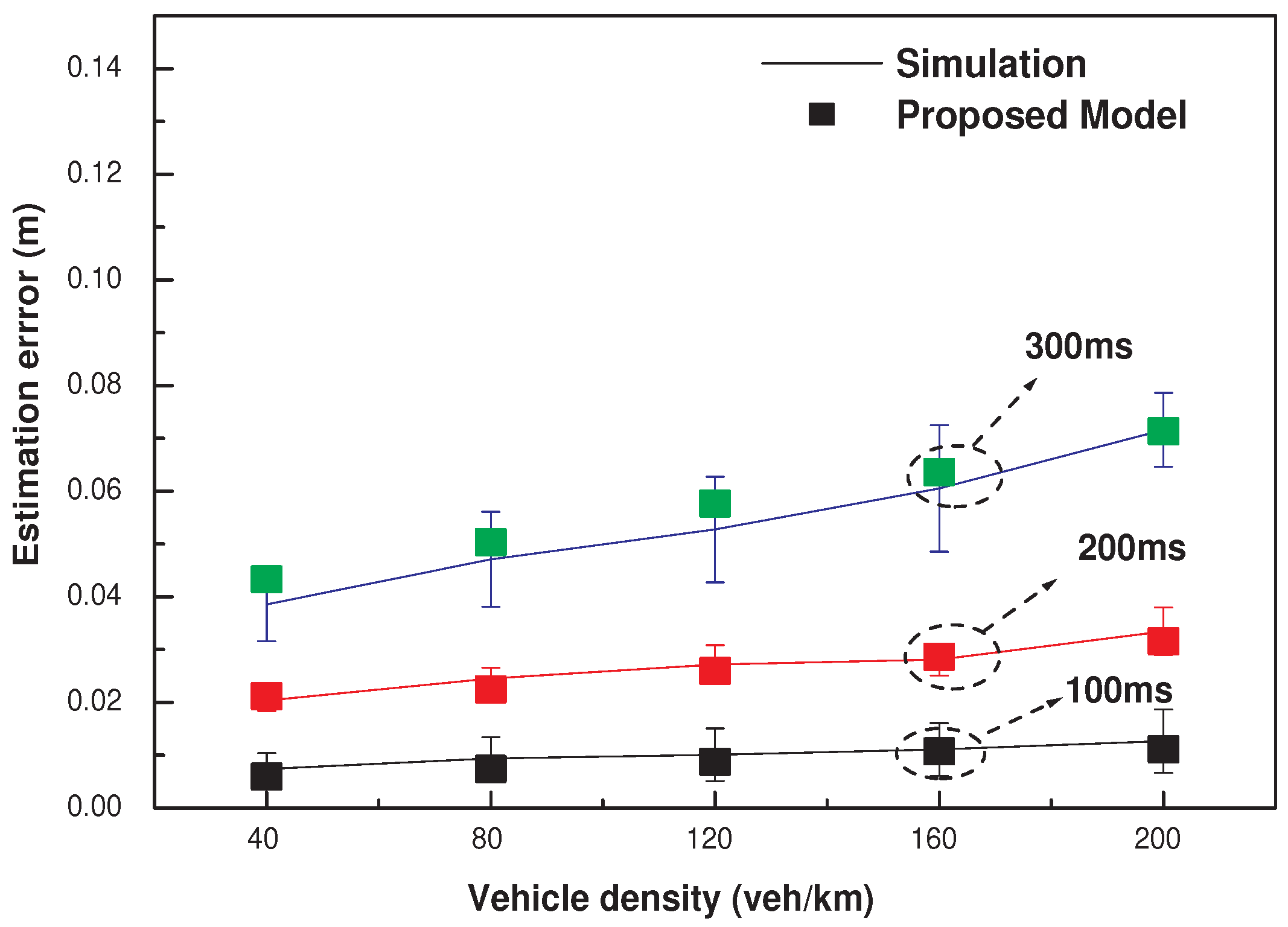
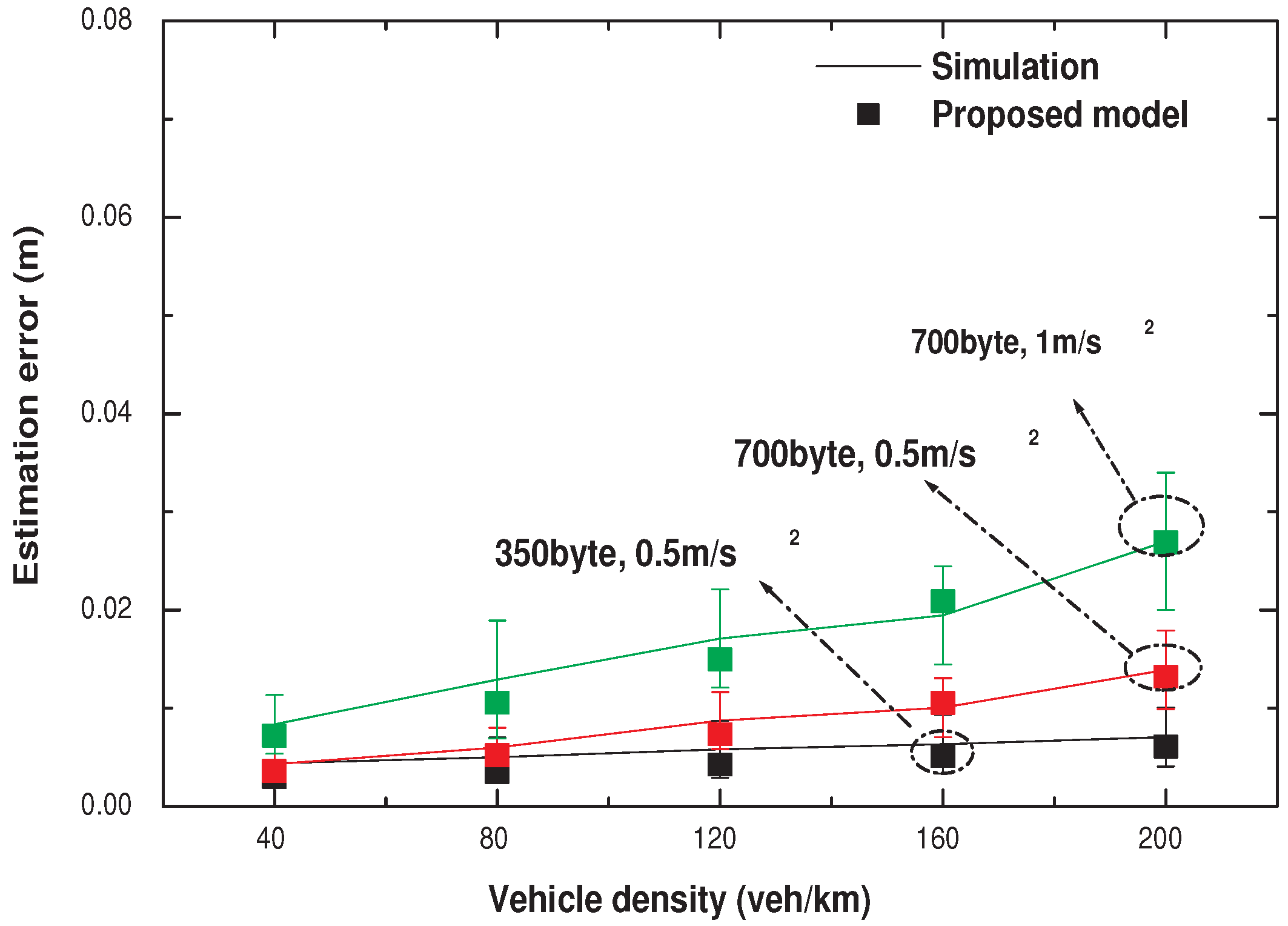
- We validate the proposed model by comparing the numerical results of the model with the NS-2 simulation results.
2. Analytic Model for the Estimation Error of a Neighbor’s Evolving Position
2.1. System Model
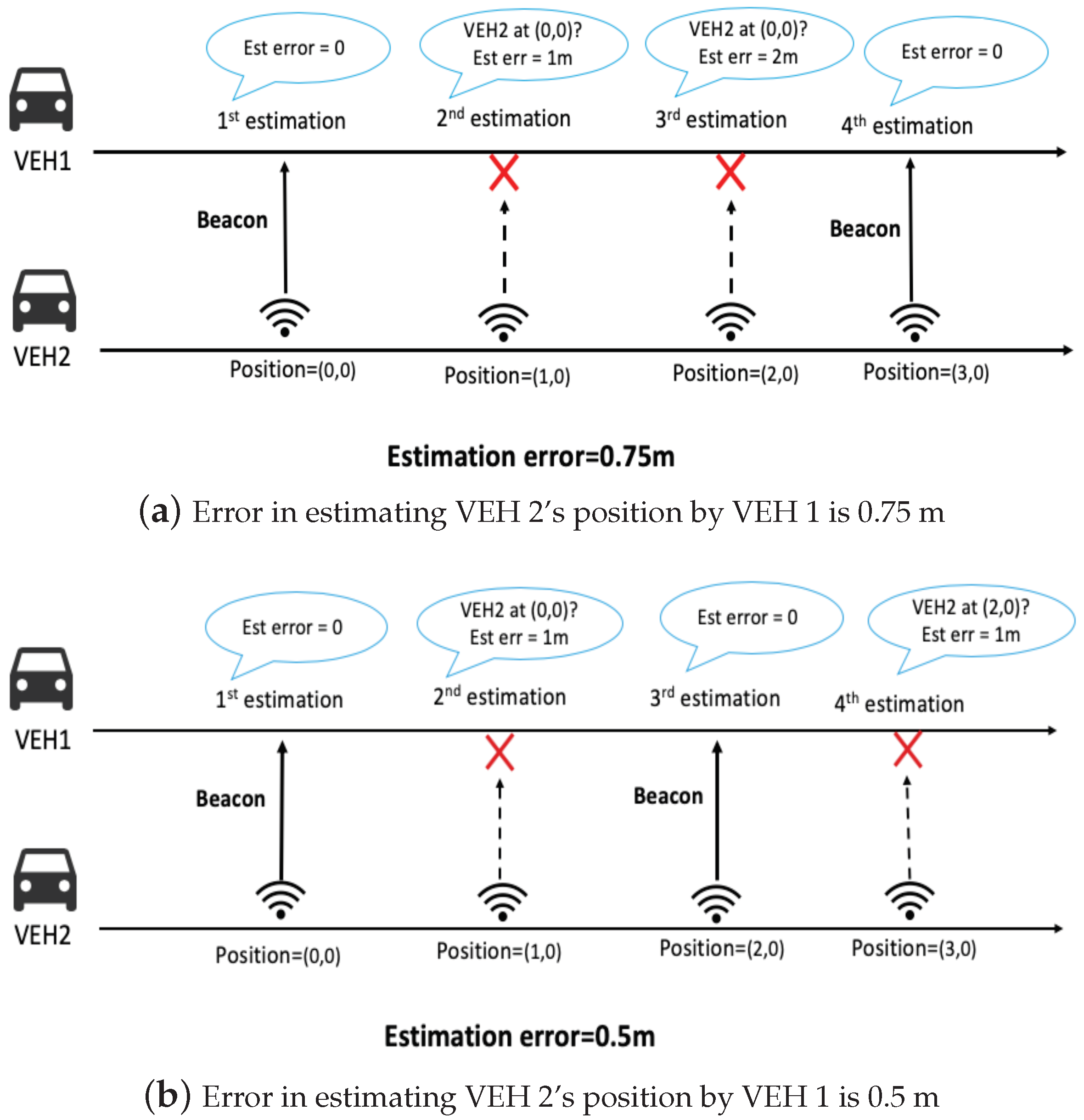
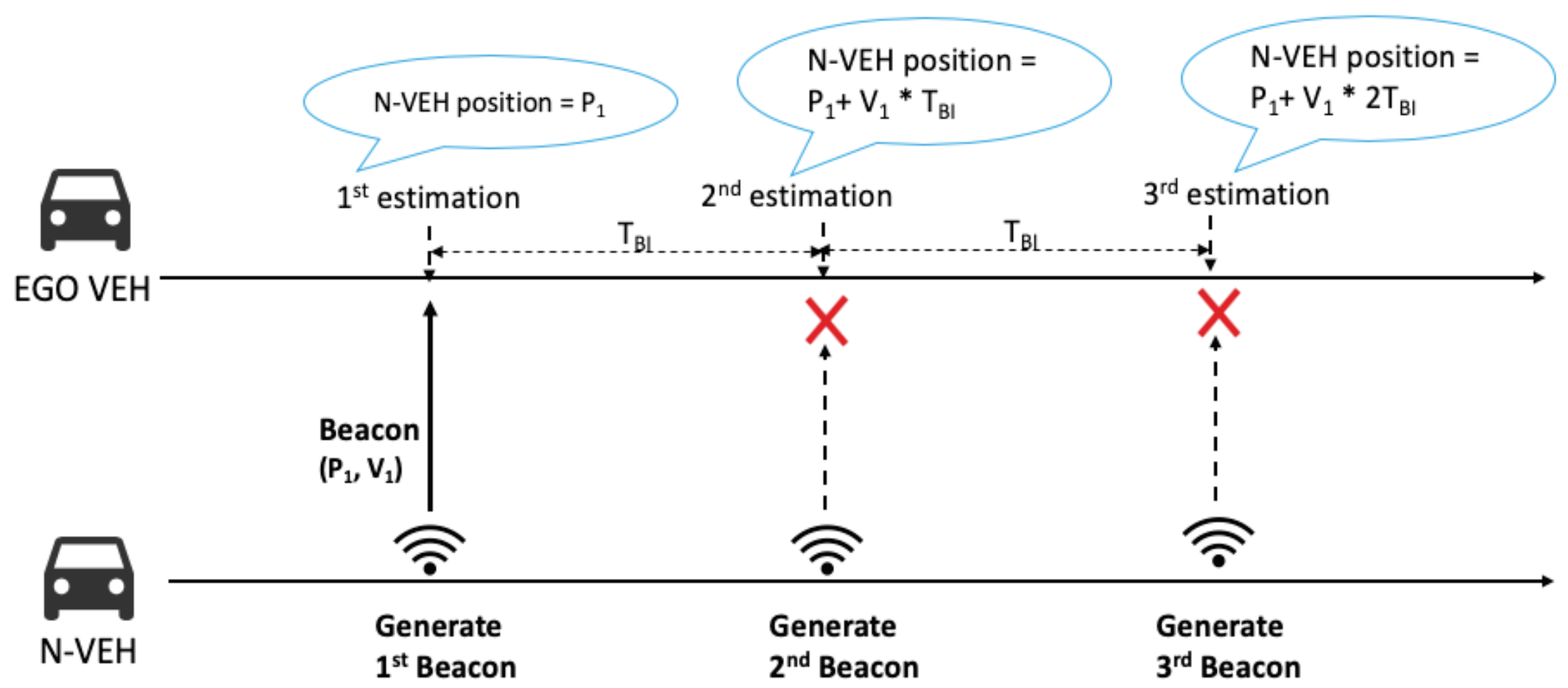
2.2. Estimation Error of a Neighbor’s Evolving Position
2.3. Derivation of the Probability of Successful Reception
3. Model Validation
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CSPE | Constant Speed and Position Estimator |
| VANET | Vehicular Ad-hoc NETwork |
| PDR | Packet Delivery Ratio |
| CSMA/CA | Carrier Sense Multiple Access with Collision Avoidance |
References
- Campolo, C.; Molinaro, A.; Vinel, A.; Zhang, Y. Modeling Prioritized Broadcasting in Multichannel Vehicular Networks. IEEE Trans. Veh. Technol. 2012, 61, 687–701. [Google Scholar] [CrossRef]
- Ghandour, A.J.; Di Felice, M.; Artail, H.; Bononi, L. Dissemination of Safety Message in IEEE 802.11p/WAVE Vehicular Network: Analytical Study and Protocol Enhancements. Pervasive Mob. Comput. 2014, 11, 3–18. [Google Scholar] [CrossRef]
- Hassan, M.I.; Vu, H.L.; Sakurai, T. Performance Analysis of the IEEE 802.11 MAC Protocol for DSRC Safety Applications. IEEE Trans. Veh. Technol. 2011, 60, 3882–3896. [Google Scholar] [CrossRef]
- Hafeez, K.A.; Zhao, L.; Ma, B.; Mark, J.W. Performance Analysis and Enhancement of the DSRC for VANET’s Safety Applications. IEEE Trans. Veh. Technol. 2013, 62, 3069–3083. [Google Scholar] [CrossRef]
- Lim, J.H.; Lee, E.K. Comments on Analytic Model of Vehicular Data Dissemination in Non-Deterministic Fading Channel. IEEE Commun. Lett. 2015, 19, 2242–2245. [Google Scholar] [CrossRef]
- Yao, Y.; Rao, L.; Liu, X.; Zhou, X. Delay Analysis and Study of IEEE 802.11p based DSRC Safety Communication in a Highway Environment. In Proceedings of the 2013 Proceedings IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 1591–1599. [Google Scholar]
- Zheng, J.; Wu, Q. Performance Modeling and Analysis of the IEEE 802.11p EDCA Mechanism for VANET. IEEE Trans. Veh. Technol. 2016, 65, 2673–2687. [Google Scholar] [CrossRef]
- Shah, A.S.; Mustari, N. Modeling and Performance Analysis of the IEEE 802.11P Enhanced Distributed Channel Access Function for Vehicular Network. In Proceedings of the IEEE Future Technologies Conference, San Francisco, CA, USA, 6–7 December 2016; pp. 173–178. [Google Scholar]
- Lim, J.H.; Naito, K.; Yun, J.H.; Gerla, M. Reliable Safety Message Dissemination in NLOS Intersections Using TV White Spectrum. IEEE Trans. Mob. Comput. 2018, 17, 169–182. [Google Scholar] [CrossRef]
- Nguyen, H.H.; Jeong, H.Y. Mobility-Adaptive Beacon Broadcast for Vehicular Cooperative Safety-Critical Applications. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1996–2010. [Google Scholar] [CrossRef]
- Bansal, G.; Lu, H.; Kenney, J.B.; Poellabauer, C. EMBARC: Error Model-based Adaptive Rate Control for Vehicle-to-Vehicle Communications. In Proceedings of the tenth ACM International Workshop on Vehicular Inter-Networking, Systems, and Applications, Taipei, Taiwan, 25 June 2013; pp. 41–50. [Google Scholar]
- The Network Simulator, ns-2. 2006. Available online: http://www.isi.edu/nsnam/ns (accessed on 12 August 2020).
- Khabazian, M.; Aissa, S. Modeling and Performance Analysis of Cooperative Communications in Cognitive Radio Networks. In Proceedings of the 2011 IEEE 22nd International Symposium on Personal, Indoor and Mobile Radio Communications, Toronto, ON, Canada, 11–14 September 2011. [Google Scholar]
- McShane, W.R.; Roess, R.P. Traffic Engineering, 3rd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 2004. [Google Scholar]
- Bianchi, G. Performance Analysis of the IEEE 802.11 Distributed Coordination Function. IEEE J. Sel. Area Commun. 2000, 18, 535–547. [Google Scholar] [CrossRef]
- Leonardo, K. Queueing Systems; John Wiley: Hoboken, NJ, USA, 1975; Volume I. [Google Scholar]
- IEEE Computer Society LAN/MAN Standards Committee. IEEE Standard for Information Technology Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks Specific Requirements; Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications; Amendment 6: Wireless Access in Vehicular Environments; IEEE Std.: New York, NY, USA, 2010; Volume 802. [Google Scholar]
- Mehar, A.; Chandra, S.; Velmurugan, S. Speed and Acceleration Characteristics of Different Types of Vehicles on Multi-Lane Highways. Eur. Transp. 2013, 55, 1–12. [Google Scholar]
- Abbas, T.; Sjöberg, K.; Karedal, J.; Tufvesson, F. A Measurement Based Shadow Fading Model for Vehicle-to-Vehicle Network Simulations. Int. J. Antennas Propag. 2015, 2015, 190607. [Google Scholar] [CrossRef]
- Olariu, S.; Weigle, M.C. Vehicular Networks: From Theory to Practice; Chapman and Hall/CRC: Boca Raton, FL, USA, 2009. [Google Scholar]
- Montemerlo, M.; Becker, J.; Bhat, S.; Dahlkamp, H.; Dolgov, D.; Ettinger, S.; Haehnel, D.; Hilden, T.; Hoffmann, G.; Huhnke, B.; et al. Junior: The Stanford Entry in the Urban Challenge. J. Field Robot. 2008, 25, 569–597. [Google Scholar] [CrossRef]
- Wang, L.; Groves, P.D.; Ziebart, M.K. GNSS Shadow Matching: Improving Urban Positioning Accuracy Using a 3D City Model with Optimized Visibility Prediction Scoring. J. Inst. Navig. 2013, 60, 195–207. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual current position of a neighbor | |
| Acceleration at time t | |
| Velocity of a neighbor at time t | |
| Vehicle density | |
| R | Transmission range |
| Beacon interval | |
| Packet arrival rate | |
| Probability that a buffer is not empty | |
| Transmission attempt probability | |
| Probability of busy channel | |
| Average service time | |
| Minimum contention window size | |
| Average slot time | |
| Transmission duration of a beacon | |
| Duration of an empty slot time |
| Data Rate | 3 Mbps |
|---|---|
| Duration of an empty slot time () | 16 μs |
| Minimum Contention Window () | 15 |
| Transmission range (R) | 450 m |
| Average acceleration (a) | 1 m/s |
| Number of iterations | 20 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, J.-H.; Lee, E.-K. Modeling the Accuracy of Estimating a Neighbor’s Evolving Position in VANET. Appl. Sci. 2020, 10, 6814. https://doi.org/10.3390/app10196814
Lim J-H, Lee E-K. Modeling the Accuracy of Estimating a Neighbor’s Evolving Position in VANET. Applied Sciences. 2020; 10(19):6814. https://doi.org/10.3390/app10196814
Chicago/Turabian StyleLim, Jae-Han, and Eun-Kyu Lee. 2020. "Modeling the Accuracy of Estimating a Neighbor’s Evolving Position in VANET" Applied Sciences 10, no. 19: 6814. https://doi.org/10.3390/app10196814
APA StyleLim, J.-H., & Lee, E.-K. (2020). Modeling the Accuracy of Estimating a Neighbor’s Evolving Position in VANET. Applied Sciences, 10(19), 6814. https://doi.org/10.3390/app10196814