1. Introduction
The use of quadrotors has become remarkable nowadays [
1,
2,
3], because of their capability to fly in both small indoor areas and rough outdoor environments which, for example, helps to perform rescue missions in case of disasters or for agricultural monitoring.
Since quadrotors are characterized by under-actuated dynamics [
4] and their models show nonlinear coupling between the different degrees of freedom, the literature presents nonlinear control approaches that deal with such models with parameter uncertainties as in [
5,
6,
7], where in the latest, the authors have used an adaptive barrier function to ensure fast convergence in the presence of uncertainties in the model. From the nonlinear control theory, the authors in [
8] have considered an attitude representation given by Modified Rodrigues Parameters (MRPs) exploited by a passivity-based scheme to stabilize the attitude dynamics that is combined with a differential flatness-based approach for the position dynamics to linearize the system via feedforward control.
The robustification against disturbances has also been studied in the literature [
9]. In addition, the authors of [
10] have proposed a backstepping method interfaced with sliding mode control for position and attitude control in the presence of external disturbances, while the estimation of controller parameters was assured by using adaptive laws. In addition, the upper limits of the attitude perturbations were estimated with the same approach. For the same purpose, the authors in [
11] have considered a nonlinear Proportional Integral Derivative (PID) controller where its parameters have been tuned using a Genetic Algorithm to minimize a multi-objective output performance index. Compared to the Linear PID, the attitude loop has shown better robustness against measurement noise and disturbance in contrast to the position loop.
Another challenge that has been tackled in the literature is dealing with actuator faults, as in [
12], where the authors have combined model predictive control and reinforcement learning to detect and compensate faults of a quadrotor during trajectory tracking. The same objective has been treated with the help of linear control theory in [
13,
14,
15], where the authors exploited the linear matrix inequalities (LMIs) tool to solve
problems for different purposes such as fault diagnosis or state estimation, while the authors in [
16] have exploited a Kalman filter to propose a fault detection and diagnosis scheme to detect and isolate actuator faults in presence of external disturbances. In contrast to this, the authors of the reference [
17] have exploited an extended Kalman filter. In [
18,
19], the authors have exploited a zonotopic unknown input observer and the zonotopic extended Kalman filter for state estimation, respectively.
The state estimation is required if there is no possibility to measure a physical quantity. The estimate then serves as a substitute for non-measured signals, and it is then used by the control law as in [
20] where the authors have addressed the trajectory tracking problem using saturated proportional–derivative (PD) control laws and disturbance compensation, in addition to an observer-based attitude tracking control that has been established in a separate design phase. The same procedure has been exploited in [
21], where the authors have used the solution of a type of generalized Sylvester equation to parameterize a full-order observer-based controller for a quasi-linear system. Moreover, the authors have demonstrated the validity of the separation theorem since they have considered perfectly known time-varying parameters and state values.
Although several papers have been published that tackle the design of controllers and observers separately, little attention has been paid to a joint design if the modeled systems are nonlinear or depend on uncertain parameters. To the best of the authors’ knowledge, an example of such kind of research can be found in [
22] where the authors have considered time delays and input disturbances in their design phase. In [
23,
24], the authors have exploited the LMI framework in order to simultaneously design a controller and observer that guarantee stability and robust performance despite the occurrence of actuator faults, model uncertainty, nonlinearities, and measurement noise and that only require the tuning of two parameters. This joint design of control and observer gains is justified by the illustrating example given in the 2nd section in [
24]. It illustrates the fact that the separation principle of control and observer design no longer holds for linear systems with bounded parameter uncertainty. This is equally true for the case of nonlinear systems. To keep the control design as simple as possible, we investigate the following design procedure in the current article: The control architecture is divided into two parts so that a robust LMI-based approach is employed for the inner loop, whilst optimized proportional and proportional–integral controllers are used for the cascaded outer loops. Hence, the purpose is to evaluate the time-domain performance of the mutual impact between the cascaded control loops while enhancing flight accuracy despite measurement noise and external disturbances such as wind or component wear. Moreover, it is shown that the proposed design procedure clearly outperforms the control accuracy achievable by a standard tuning approach for this type of control structure, both in the unperturbed case and in a setting in which large actuator disturbances act on the closed-loop system dynamics.
This paper is organized as follows. In
Section 2, the quadrotor model is introduced. In
Section 3, the control methods and the parametrization of the state trajectories are described. In
Section 4, simulation results are presented. Finally, the paper is concluded in
Section 5 with a discussion of the obtained results and an outlook on future work.
2. Quadrotor Modeling
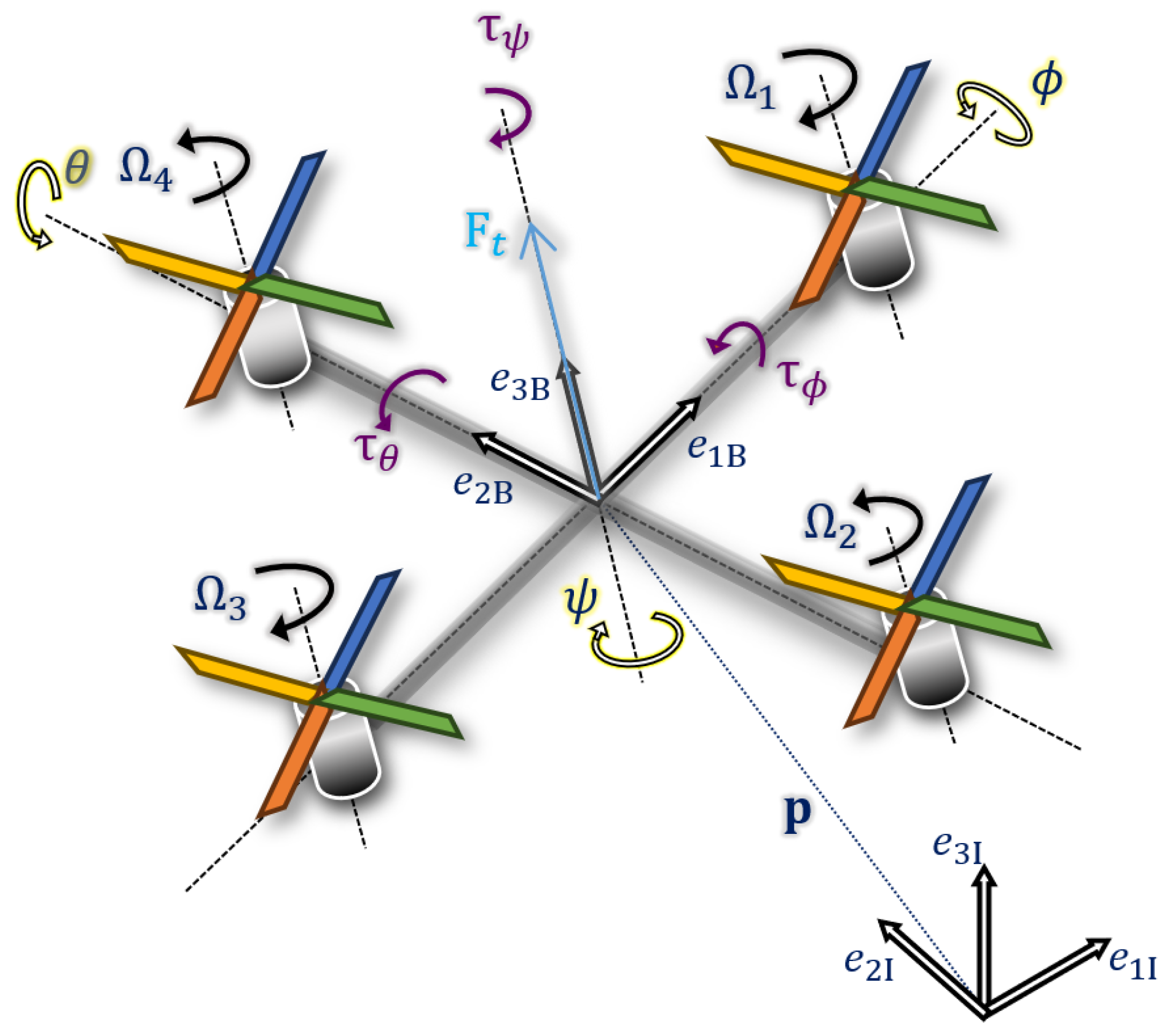
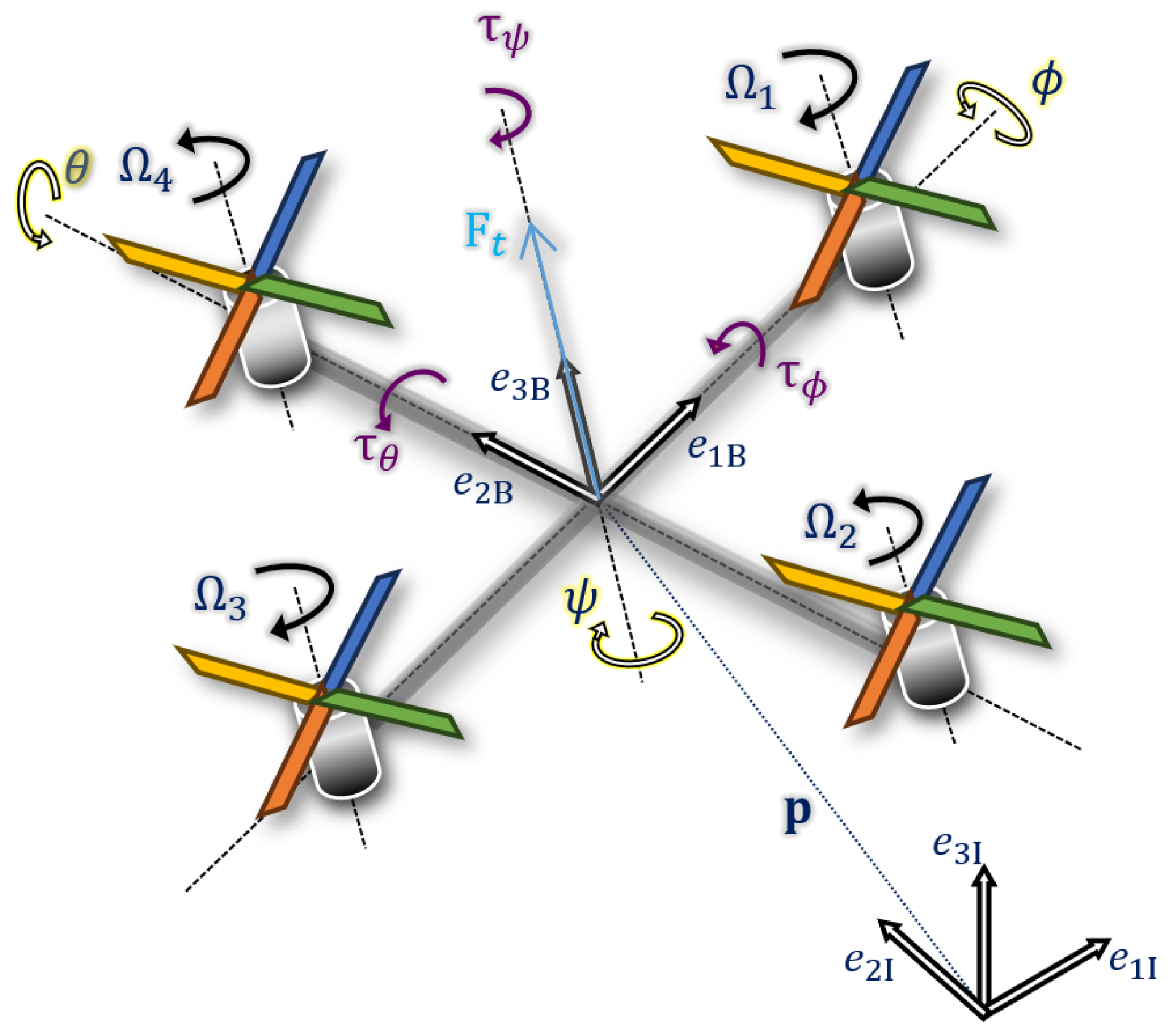
To be able to derive the nonlinear dynamic equations of the quadrotor, the rotation from earth’s inertial frame (
) to the body fixed-frame (
) is considered as described in
Figure 1 with the use of the ZYX convention [
25].
According to [
26], the Newton–Euler formalism is employed which is less complex and less difficult to compute compared to the Euler–Lagrangian approach [
27]. For modeling and control purposes, the general dynamic model of a quadrotor is subdivided into two parts. The first one is the attitude sub-model represented by
and the second is the velocity sub-model represented by
with
denoting, respectively, the roll, pitch, and yaw angles. The position of the quadrotor in the earth-fixed coordinate frame is described by the vector
denoting, respectively, the longitudinal, lateral, and vertical axes. The parameter
is the rotor inertia, while
,
, and
are the diagonal entries of the quadrotor’s inertia matrix. The parameter
l is the length of the lever, while
m and
g are, respectively, the mass and the Earth’s gravity.
The total thrust
is the sum of the thrusts of each of the rotors, where
represent, respectively, the roll, pitch, and yaw torques, all depending on the rotor speeds
, according to
Additionally, the variable
is considered during the parametrization of the inner loop as a fictitious stochastic disturbance. However, when optimizing the outer control loops, and when performing the system simulation, the dependence of
on the speeds of the four rotors is accounted for by the relation
with the constants
b and
d being, respectively, the thrust factor and the drag factor.
3. Quadrotor Control System
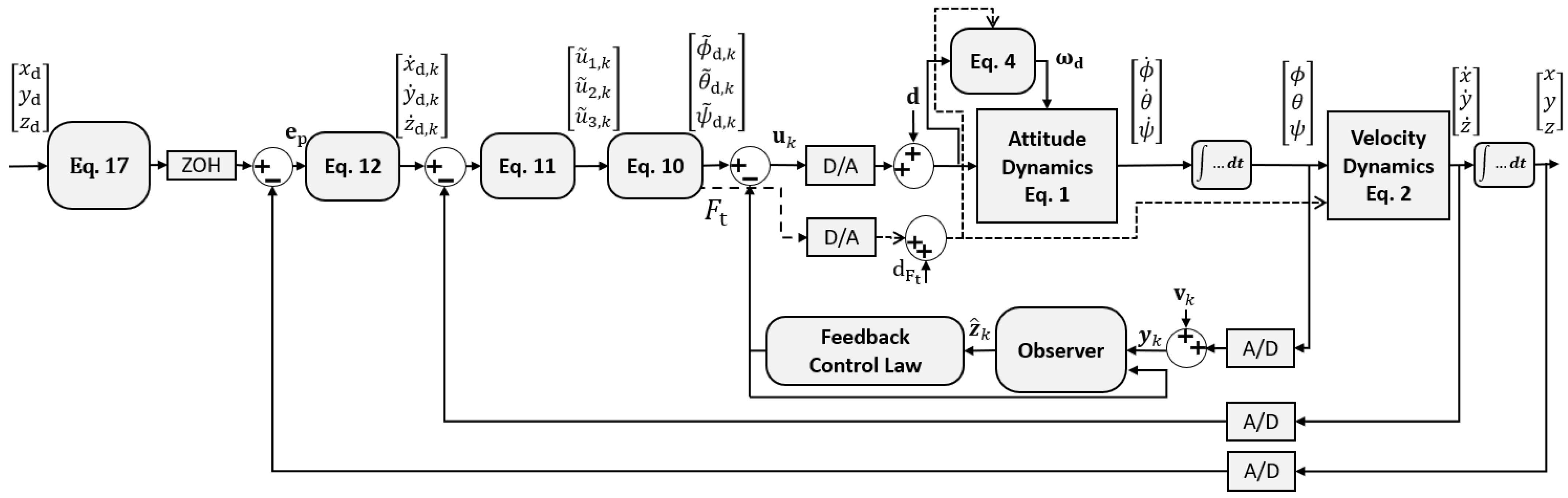
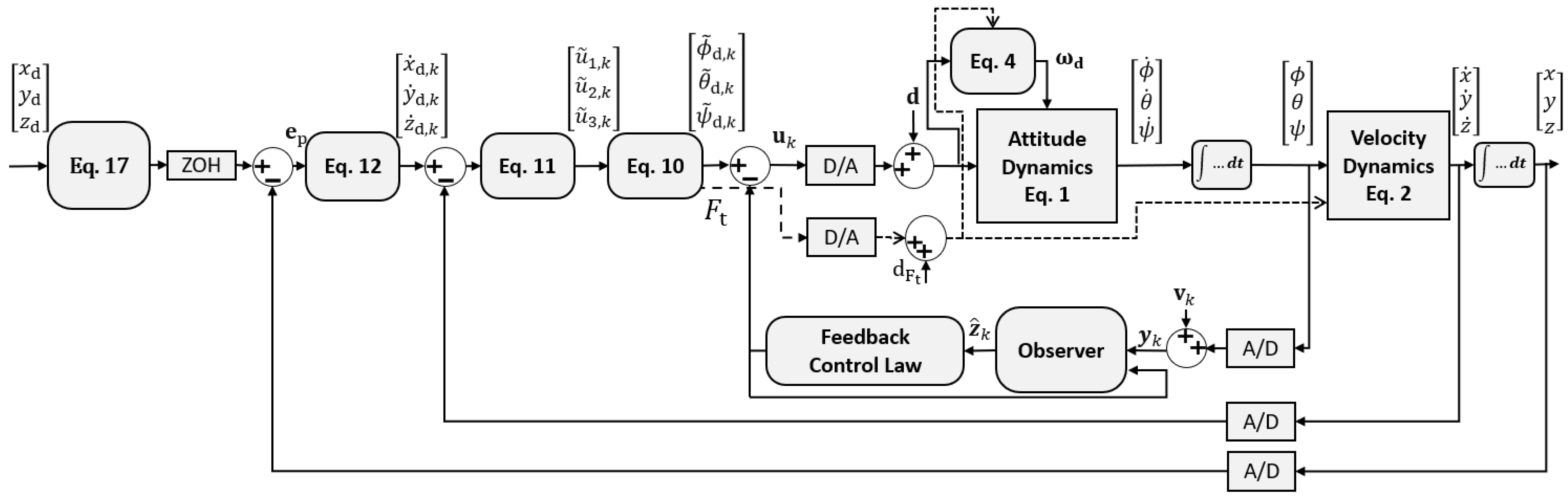
To design the control system for the quadrotor, two main control loops have been constructed as cascaded outer and inner loops, as shown in
Figure 2. The two outer ones encompass the position and velocity control loops that ensure the fulfillment of the position tracking mission, whilst the inner-most is responsible for attitude tracking.
Remark 1. This structure ensures that the outer position and velocity control loops do not negatively impact the overall system stability as long as the quadrotor is operated with reference trajectories that lead to system states that are compatible with the state constraints resulting from the polytopic uncertainty model derived in Section 3.1. If this property is satisfied, the combination of the underlying LMI-based state feedback in the inner loop with the P/PI outer feedback loops ensures asymptotic stability of the overall control system. This statement is equally true for a nominal system behavior without actuator faults and for scenarios in which actuator faults are present as long as the latter do not lead to a loss of controllability. 3.1. Parametrization of the Attitude Control Loop Using an LMI-Based Method
To guarantee robust performance despite actuator faults, model uncertainty, nonlinearities, and measurement noise, the authors of [
23] have employed a novel iterative LMI approach to design a discrete-time observer-based state-feedback controller in the presence of both bounded parameter uncertainty and stochastic noise.
Reformulating (
1) as a discrete-time quasi-linear state-space representation yields
where the explicit Euler method with a sampling time
ms is used in this paper. Moreover, the state vector is
which is assumed to be bounded by a priori known intervals, which are compatible with the reference trajectory to be tracked. The input vector of the inner loop is denoted by
. Additionally,
and
are, respectively, the output vector and actuator fault vector acting additively on
. Finally,
is the state-dependent system matrix,
is the input matrix,
is the disturbance input matrix, coupling the process noise with the system dynamics, and
is the output matrix. A standard normally distributed random output noise
is taken into consideration with its standard deviation specified by the matrix
.
In a practical application, the actuator faults could manifest themselves in different manners like a blocking, saturation, or efficiency loss of the physical actuators. Hence, a discrete-time integrator actuator fault model is taken into account to be able to estimate such faults , while these estimates are used for the compensation.
The occurrence of actuator faults influences the total thrust and the deviation is represented with . This deviation is transmitted to the attitude dynamics through . This deviation is neither estimated nor compensated in the closed inner loop. However, the influence of such faults is assumed to be sufficiently small due to its multiplication with the small drag factor.
Compared to what has been addressed in [
28,
29], the variable
is taken into consideration in the algorithm of the proposed iterative LMI-based controller design as a fictitious (random) disturbance instead of an alternative compensation of its influence in the control law formula that would be possible in a least-squares sense.
For the sake of state and disturbance estimation, consider a linear time-invariant full-state observer that is designed on the basis of the discrete-time state-space representation
where
and
are the nominal system matrices evaluated in the hovering state.
This observer provides the required information to realize the inner control loop with the estimated vector
in the form
where the matrix
replaces a pre-filter which could be used as an alternative to the following outer loop optimization to reduce tracking errors during transient phases. The vector
is determined in
Section 3.4 by an approximation around the hovering state (assuming sufficiently small angles in roll, pitch, and yaw).
Considering the estimation error model
and combining it with the discrete-time model of the observer-based inner control loop leads to the augmented state- space representation
with
,
. This augmented system model takes into consideration both process and output noise, where the latter was not explicitly considered in the previous work [
23].
Thereafter, a selection of interval bounds for the states included in
and
forms the basis for building a polytopic domain with
extremal vertices that are involved in an optimization task that exploits the Lyapunov stability method as described in [
23], generalized by both a placement of poles into the desired regions and a robustification against noise. Therefore, the design algorithm starts by choosing a radius
r and a center
of a circle in the
z-plane corresponding to the desired closed-loop eigenvalue domain. The design provides the controller gain
and the observer gain
that are optimized jointly. Thus, the stabilization of the nonlinear system in a predefined operating range is ensured. The computation effort of this algorithm is not critical from a real-time perspective since it is executed offline.
3.2. Extended Kalman Filter-Based Linear Quadratic Regulator Design
An alternative control method to parametrize the inner loop is to employ an extended Kalman filter (EKF) to estimate the states and actuator faults, so that this information can be used by the linear quadratic regulator (LQR).
As shown in the paper [
23], additive Gaussian process noise is considered in Equation (
5) as well as in the integrator disturbance model employed for actuator fault detection characterized by their corresponding mean values (being zero) and their covariance matrices.
The EKF approach consists of two parts, where all computations are performed online. In the prediction step, the expected value and the covariance of the states and actuator faults are propagated up to the point in time where the next measurement data become available. Then, the innovation step is employed to update the expected value and covariance.
The mean values and covariance matrices are estimated recursively by an alternating sequence of prediction and innovation steps. These estimates are fed back using the same structure of the control law as shown in Equation (
7). Note that the controller gain is computed by a minimization of an integral quadratic cost function for which the weighting matrices are the available tuning factors.
This method does not provide a guaranteed proof of stability for nonlinear systems since the computation of the controller and observer gains are made separately, and the separation principle of control and observer design is no longer valid in this case.
Note that the use of an online gain scheduling [
30] or solutions on the basis of state-dependent Riccati equations could be used to enhance the reliability of this approach [
31]; however, it comes with the price of a significantly higher implementation and computational effort than the proposed methodology presented in the previous section.
3.3. Velocity and Position Control Systems
The velocity control loop provides set-point information for the output (i.e., the angles) of the inner-most sub-model which themselves are the inputs of the velocity sub-model according to Equation (
2). For the implementation of the velocity controller, the expressions (
2) are approximated around the operating point (hovering state) by using small angle approximations of the trigonometric functions, i.e.,
,
, where
denotes either the roll, pitch, or yaw angles. In addition, the yaw angle is set to zero since it is not necessary to achieve the desired velocity profile. Finally, this leads to the virtual controls
which can then be used to determine the set-points
as described in [
26].
In the equations above, the virtual controls
,
, and
are calculated by using the proportional control laws
where the subscript “
” refers to the corresponding desired signals.
The outer-most position control loop makes use of the discrete-time PI controllers
which are implemented with the help of a forward Euler discretization with
as the sampling time.
Since the quadrotor is considered to be symmetric, the desired dynamics for each Cartesian position coordinate are assumed to be the same. This justifies the use of identical control parameters for each of the coordinates in (
11) and (
12), where the actual values are obtained numerically by minimizing the square cost function
Here, the constant is the index of the final simulation time. The variable is the number of all components of the vectors. The total input is . The variables and are strictly positive weighting coefficients chosen equal to one in this study; is the position error and is the attitude error.
The
function in Matlab [
32] is used in this article to obtain suitable P/PI parameters by an iterative simulation in Simulink. Using the Nelder–Mead simplex algorithm, it returns a local minimizer of the cost function
J near the initial values of
,
, and
which are typically predetermined by a few iterations in an trial-and-error approach. Note that this optimization is firstly used for a fault-free system model. In such cases, the minimization reduces the deviation between the actual system behavior and the desired reference trajectories. In addition, it is possible to include certain fault scenarios in the simulation model used for this model-based optimization. Then, the outcome is a selection of the P/PI gains that does not only enhance the nominal system behavior but equally reduces the sensitivity of the closed-loop dynamics against actuator faults.
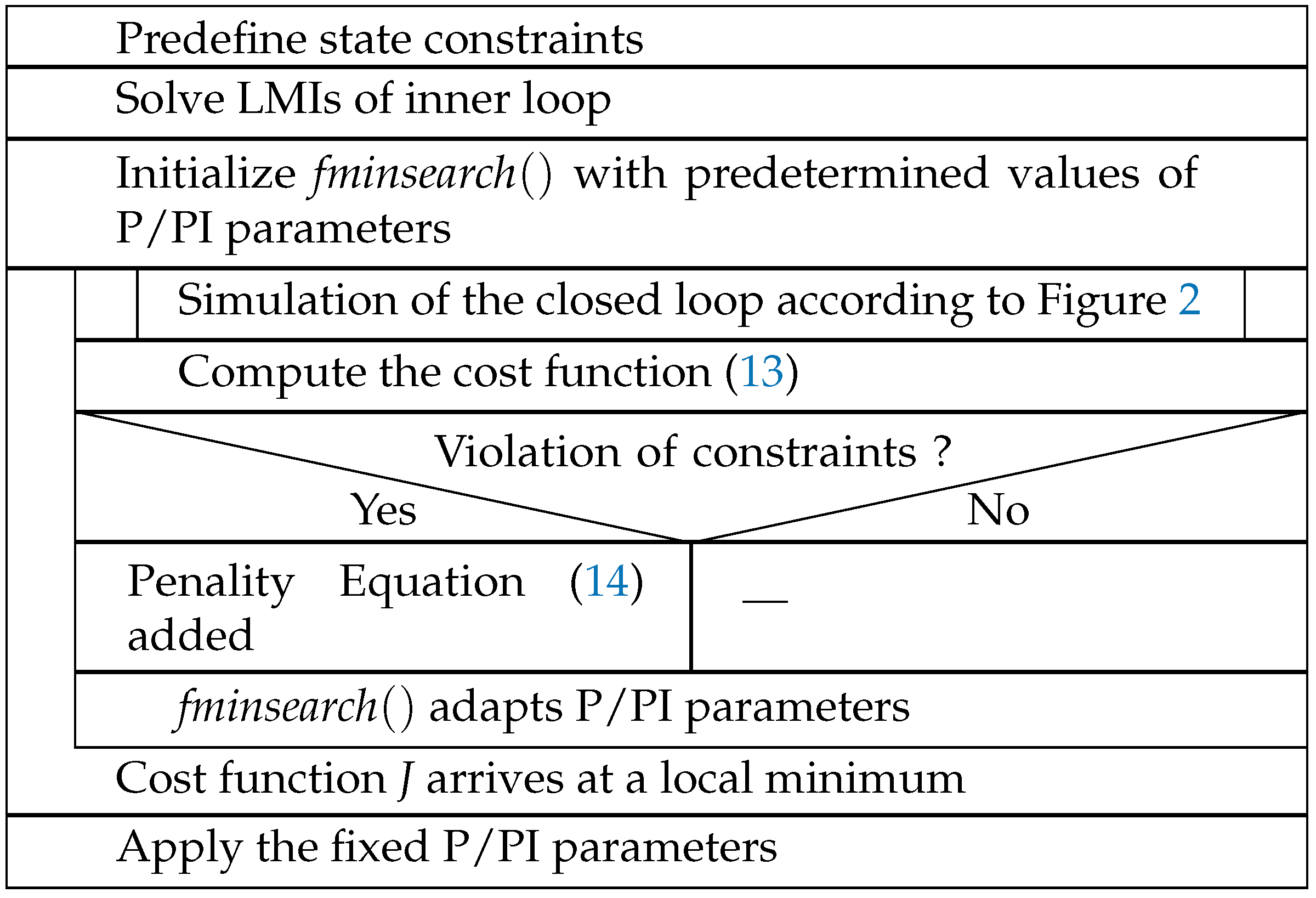
Note that a further penalty could be added within the summation of the cost function (
13) in cases in which the state bounds included in (
8) are violated due to inappropriate P/PI parameters. For instance, the angular velocities
could be penalized by choosing a higher value of the corresponding weighting coefficient
at all times outside the bounds from which the polytopic model of the LMI-based synthesis was derived. The index
l means the components of the angular velocities vector. The algorithm in
Figure 3 shows the procedure, and it is described using Nassi–Shneiderman diagram.
3.4. Trajectory Planning
In order to specify smooth position responses, and to avoid a specification of unrealistic steps as the desired output signals, a trajectory planning procedure is used. It is based on a product of time-dependent Bernstein polynomials of degree
defined on each time interval
, with
and a vector of constant coefficients
According to [
33], the coefficients (
17) are chosen so that the time derivatives of the desired state trajectories
are at least three times continuously differentiable at the points
. In this way, smooth point-to-point trajectories can be specified, while the choice of
allows for a limitation of the desired velocities and accelerations.
As a second type of desired trajectory used in the following section, ∞-shaped curves are employed. They are represented in the form of the lemniscate of Bernoulli, where the parametric equation is given by
with
as the half-width of the lemniscate.
3.5. Structural Comparison of the Performance with Nonlinear Methods from the Literature
To evaluate the fundamental properties of the developed approach, it is compared to other nonlinear methods from the literature as collected in
Table 1. As a general nonlinear alternative, an observer-based adaptive sliding mode control approach has been selected. The advantage of the proposed methodology can be found in the simplicity of its implementation on the target system (i.e., it keeps a standard linear state feedback in the underlying control loop with an optimally tuned P/PI feedback in the external loops). It should be pointed out that we do not claim at this point to outperform arbitrary nonlinear control procedures in the tracking capability with this linear feedback strategy. In contrast, we would like to emphasize that the robustified design of a linear control approach is significantly more efficient than applying state-of-the-art design principles such as a linear quadratic regulator design in combination with extended Kalman filters. It has to be noted further that our implementation is even less demanding from an online computational point of view than the aforementioned alternative due to the fact that both control and observer gains can be kept constant for the entire trajectory.
4. Simulation Results
In this section, numerical simulation results using Matlab/Simulink, with ODE1 as the solver and a step size of 1 ms which is set for
also, are presented. The inner loop is running at 1 khz, and the outer loops are running at
s. The parameter values used for the model are shown in
Table 2.
Consider firstly a surveillance mission, where the scenario is to take off vertically, go slowly horizontally, and then vertically land. After 22 s, an actuator fault occurs, which leads at the same time to deviations in the yaw torque of Nm, Nm in the roll torque , and N in the total thrust . Those values were chosen to reflect severe faults in this simulation analysis to validate the control procedure for worst-case operating conditions.
To configure the trajectory planning, the degree parameter in Equation (
15) is chosen as
. So, in the time intervals
s,
s, and
s, the first five vector entries in Equation (
17) are chosen equal to the desired initial Cartesian coordinates, and the last five entries are set to the desired final Cartesian coordinates.
Different optimizations of the outer-loop controller parameters are carried out with respect to the control method used in the inner loop. The weighting parameter in the first simulation is . For the LMI-based simulation, the parameters of the PI position controller are obtained as for the proportional gain, and for the integral gain while the value of the P velocity controller is obtained as . For the EKF-based LQR simulation, the values of the PI position controller are obtained with for the proportional gain and for the integral gain, while the value of the P velocity controller is obtained as . The values of the P/PI for the LMI-based method were obtained while testing large initial values for compared to those obtained for the EKF-LQR method, where if far from the initial values, the responses diverge.
The inner-most state feedback is parametrized by using the same values as used in [
23], except for the bounds of the angular velocities, specified in rad/s,
,
,
. For the variance of the Gaussian output noise
, the value
was chosen for all three components, with the matrix
in the synthesis phase.
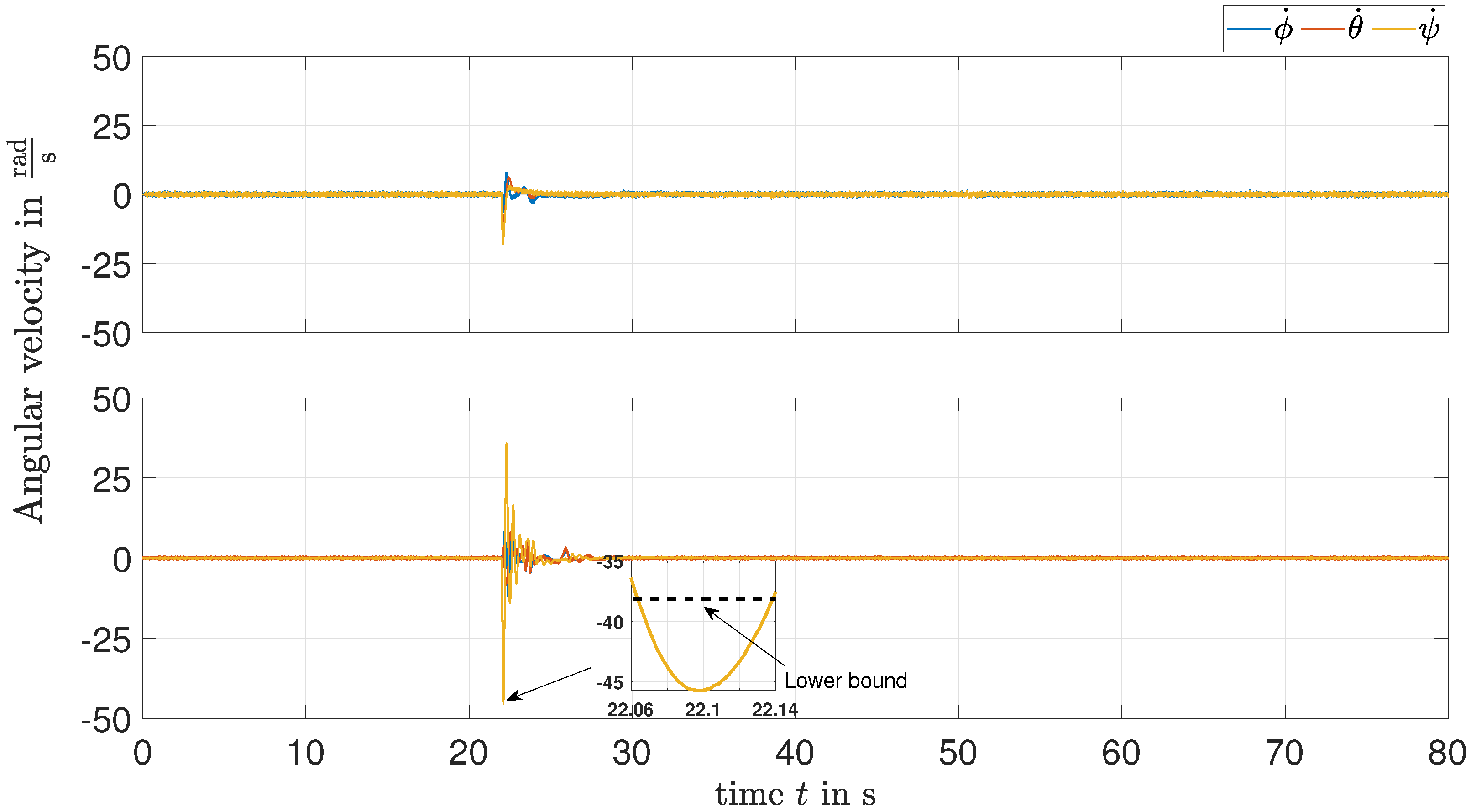
Figure 4 shows the attitude responses. It can be seen that the curves return to a steady state quickly with both methods. In the LMI-based response, throughout
s, the yaw angular velocity violates the polytopic model bounds used to represent the state dependencies in Equation (
5). The inputs applied to the quadrotor model are shown in
Figure 5.
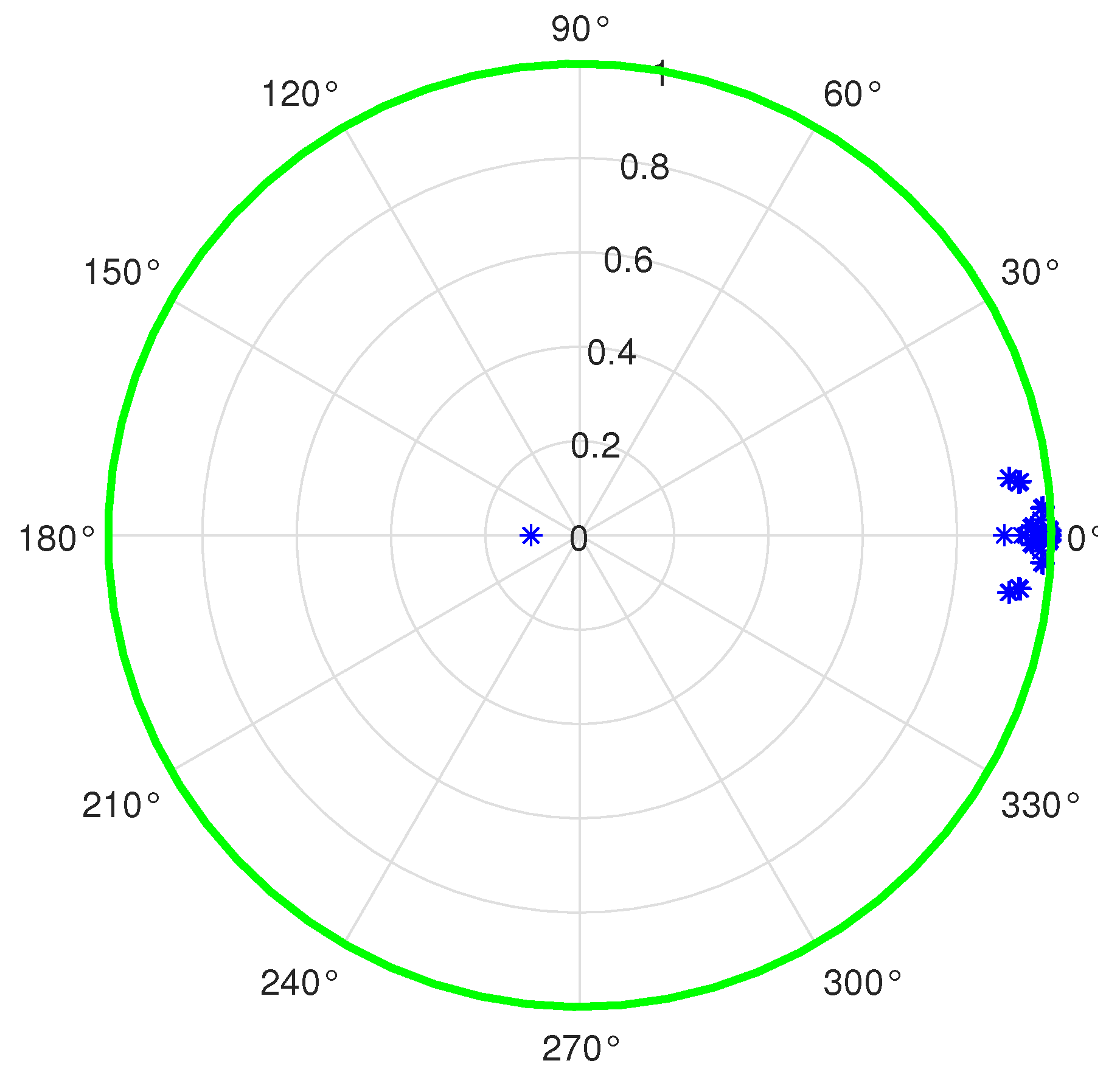
Since the stability condition established in the LMI framework may be conservative, the eigenvalues of the matrix
at the times
s are checked to be inside the unit circle. By taking the input of the inner-loop, which corresponds the output of the prefilter and the output of the attitude model which are the angles in
Figure 2, a linearized model of the inner observer-based control loop is obtained with the help of Matlab’s
function. The resulting eigenvalues of the discretized inner control loop are shown in
Figure 6, where all eigenvalues are inside the unit circle of the complex
z-plane
Although this analysis is still not a strict stability proof due to the time variance of the linearized model, it serves as an indicator for the reliability of the obtained result even in the worst case.
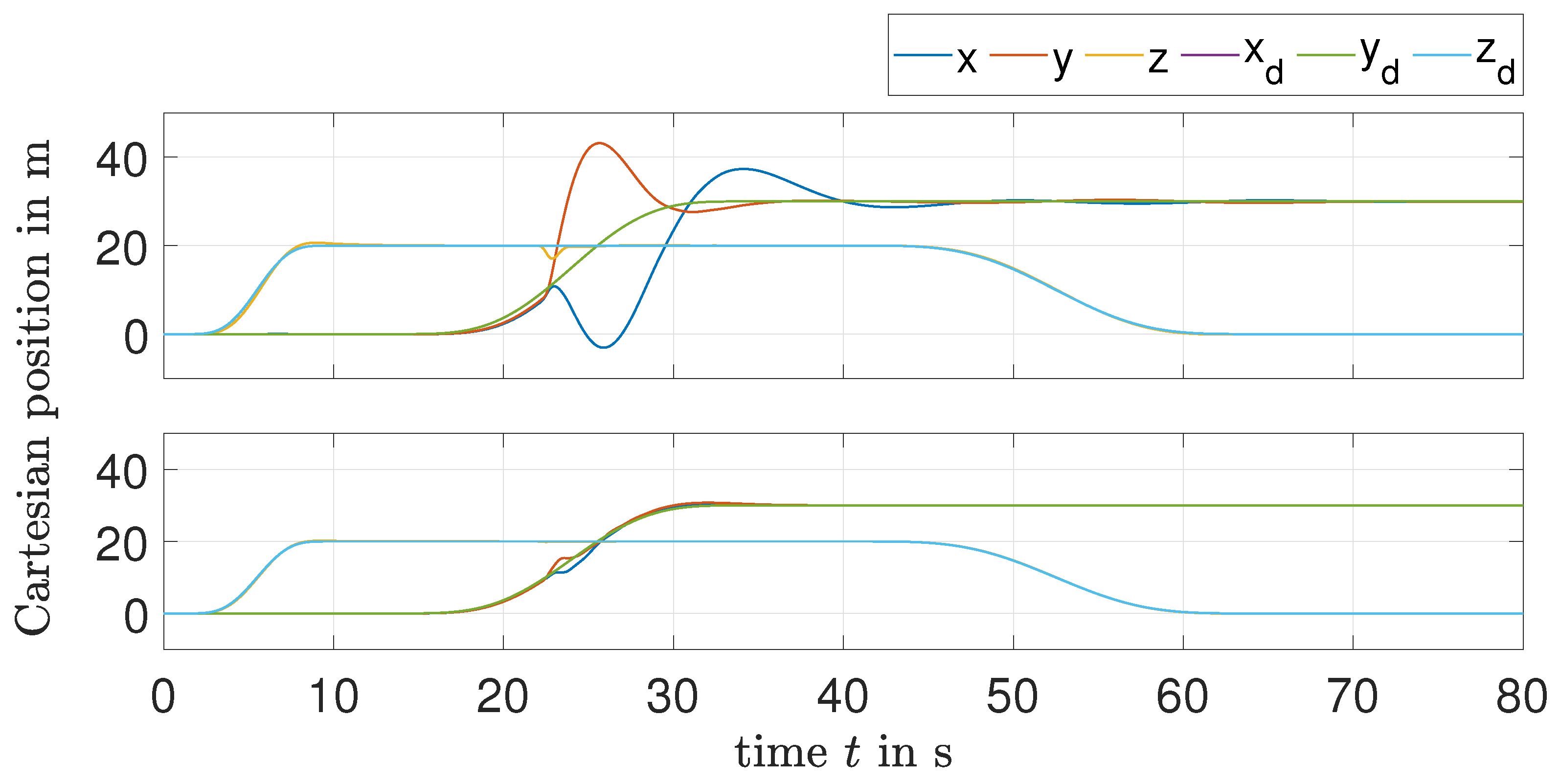
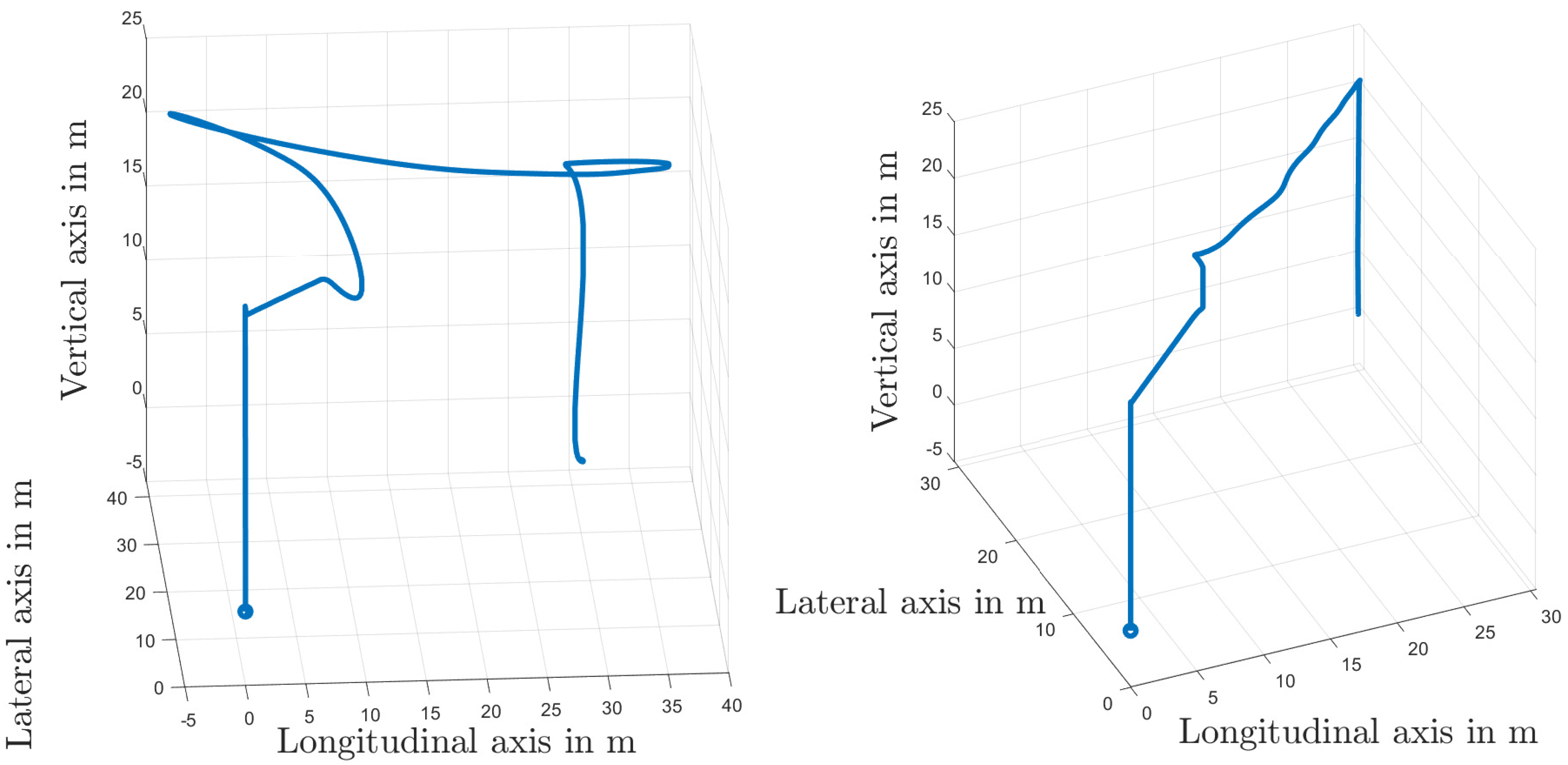
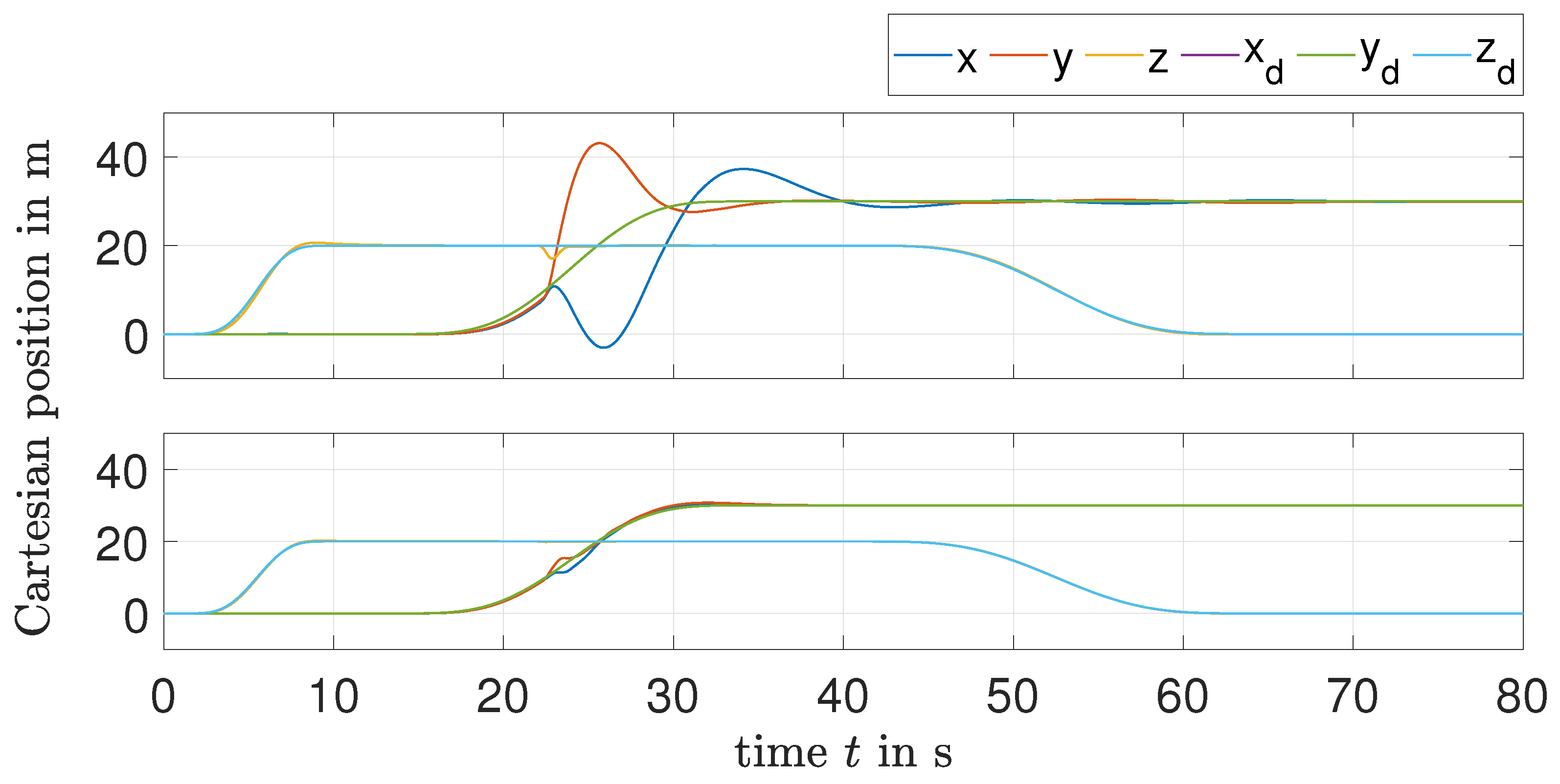
Figure 7 shows the curves of the Cartesian position, where the influence of the actuator faults significantly appears when using the EKF-based method in the inner loop, which leads to huge deviations for the longitudinal and lateral coordinates from the desired trajectories. This behavior is removed in the case of the LMI-based method. The behavior of the simulated quadrotor system in 3 dimensions is shown in
Figure 8.
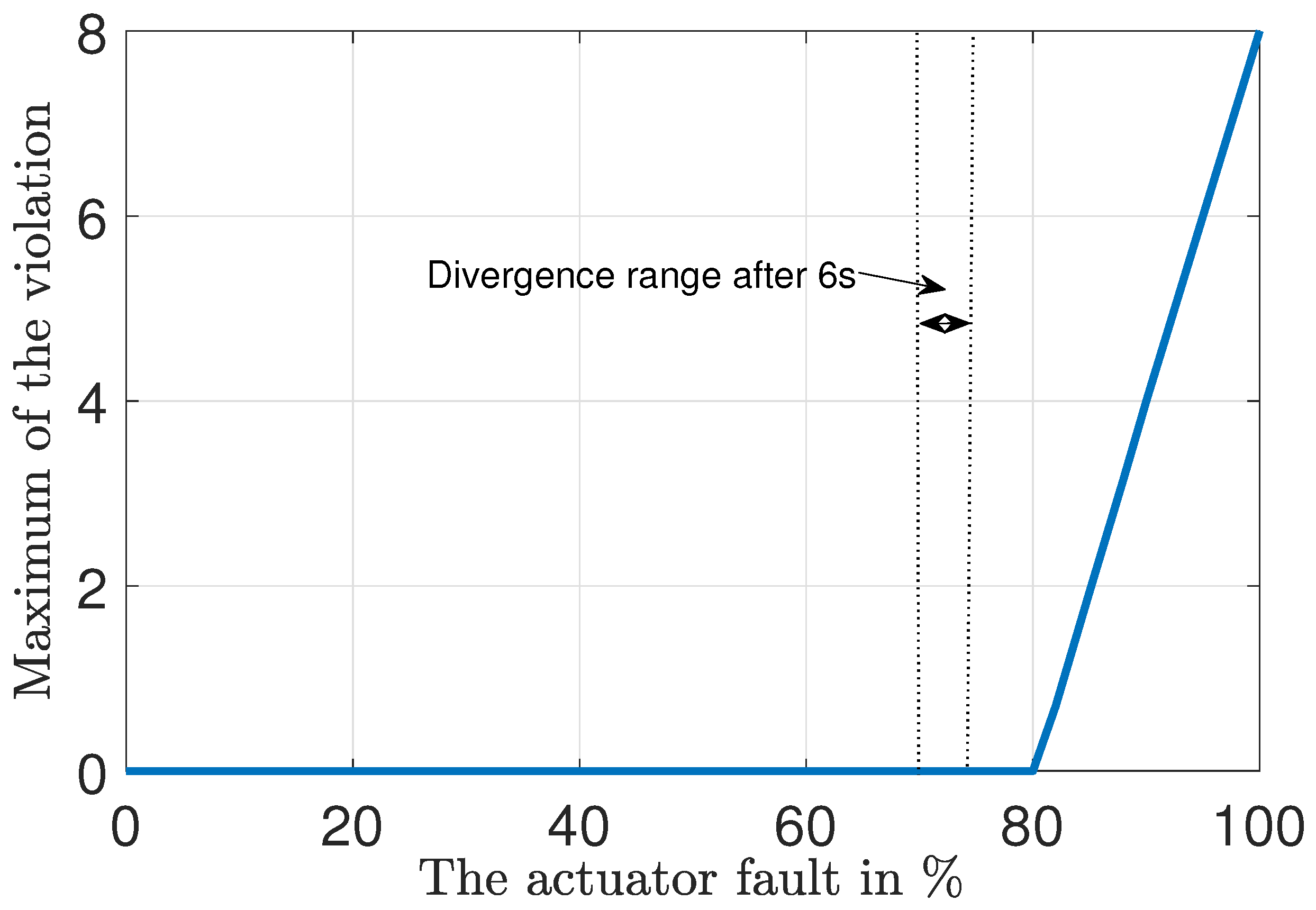
To evaluate the influence of the actuator fault magnitude on the system dynamics,
Figure 9 visualizes the maximum violation of the angular velocity intervals of the polytopic model right after the appearance of the actuator fault. The visualization is performed by scaling all fault components simultaneously within the range of [0;100]%.
Figure 9 Illustrates three different operating regimes:
Faults with a magnitude between 0 and 70%. The closed-loop system is asymptotically stable as the ensemble of all trajectories remains within the polytopic domain specified in
Section 3.1.
Within a short time frame after the fault appearance, the trajectories remain in the polytope mentioned above. However, the simplification acc. to Equation (
10) is no longer valid, so that a long-term stabilization is no longer possible in a reliable manner (70–74%). To allow for such large disturbances, a consideration of the nonlinearities is inevitable during the feedforward control design.
In (80–100%), the trajectories diverge right after the fault appearance because the polytopic domain acc. to
Section 3.1. In such cases, the linear control design is no longer valid, and nonlinear conterparts are inevitable to ensure stability.
To date, the results have been obtained without penalizing the responses outside the bounds. By choosing
, the values of the PI position controller are obtained with
for the proportional gain and
for the integral gain, while the value of the P velocity controller is obtained as
.
Figure 10 shows a reduction in the amplitude of the yaw rate compared with that obtained before. However, the precision of the pitch axis tracking became a little bit worse. This behavior is caused by the huge actuator fault which was chosen intentionally to violate the boundaries of the polytopic domain. Hence, a combined search for maximum admissible actuator faults, with iteratively tuning the bounds of the polytopic domain, could be a subject for future work. Alternatively, further means for robustification of the control performance against disturbances, such as
design criteria, can be combined in the future with the procedure for the specification of eigenvalue domains.
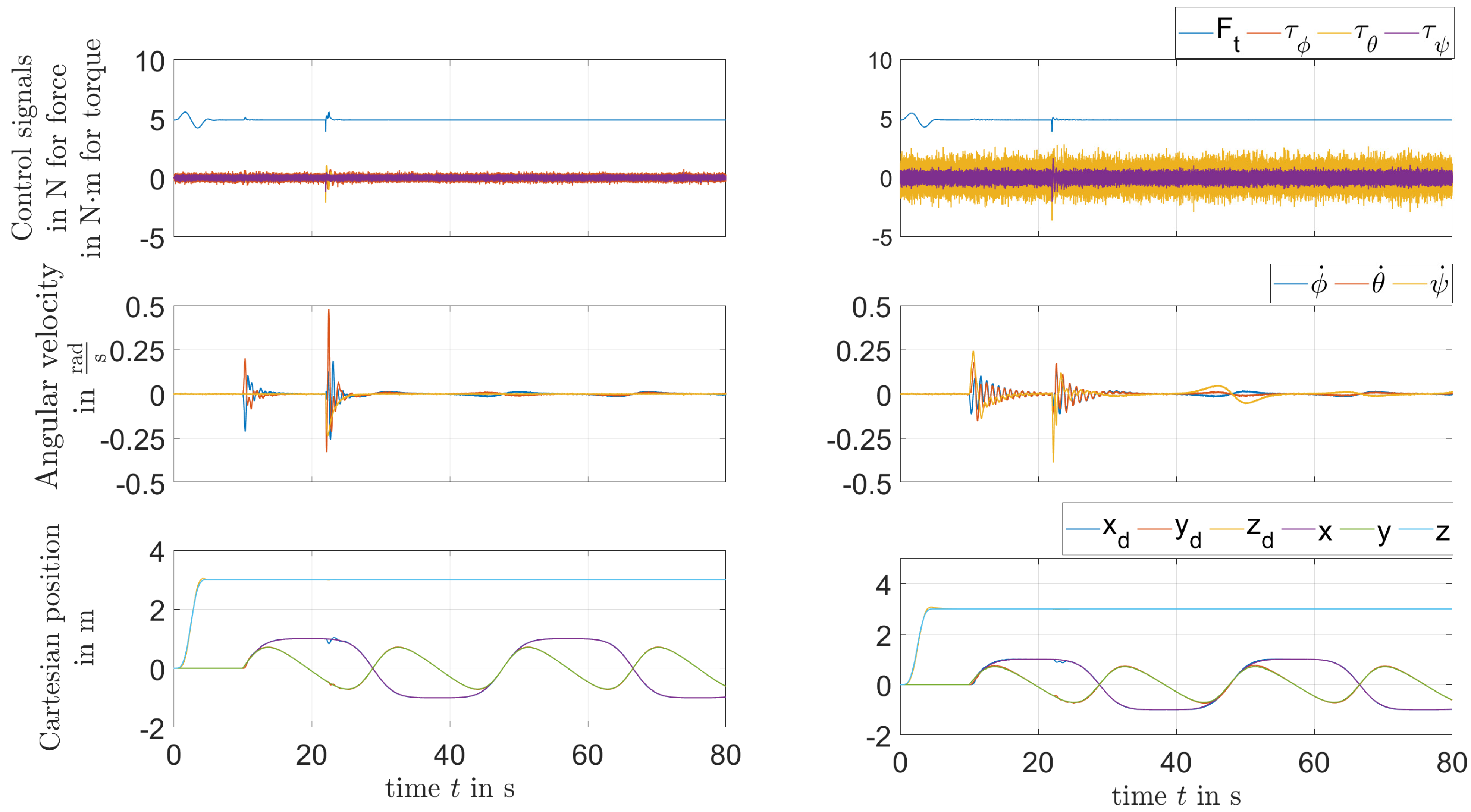
To validate the behavior of the quadrotor model further, a second trajectory is chosen that does not violate the predefined range of angular velocities. An actuator fault is additionally assumed to occur, which leads at the same time to deviations in the yaw torque of Nm, Nm in the roll torque , and N in the total thrust . The gains for the PI/P controllers were optimized for each of the two design methods with the weighting parameter . For the LMI-based simulation, the parameter values of the PI position controller are obtained as for the proportional gain, and for the integral gain, while the value of the P velocity controller is obtained as . For the EKF-based LQR simulation, the values of the PI position controller are obtained with for the proportional gain and for the integral gain, while the value of the velocity P controller is obtained as . For the variance in the Gaussian output noise , the value was chosen for all three components.
From
Figure 11, it can be seen that the desired position values are small enough and chosen to be close to the hovering state. The closer the chosen values are to the vicinity of the hovering state, the better the performance of the LMI-based approach becomes. It outperforms the EKF-LQR results shown on the left side while dealing with actuator faults at
s that are more reliably compensated with less overshoot in the trajectory tracking as shown on the right-hand side.
From the figures above, another time-performance analysis is shown in
Table 3 for a comparison between the LMI-based method on the left side of the vertical bar symbol and the EKF-based LQR method on the right side.
5. Conclusions and Future Work
The results obtained above show the impact of the control method of the inner loop on the outer loop, where the attitude obtained from the first sub-model acts as the input for the second sub-model. With both LMI and EKF-based LQR methods, the convergence of the position coordinate was assured; however, the outer-loop control system could not deal well with the actuator fault in the case of the EKF-based LQR method even with optimized P/PI controllers. In contrast to the LMI-based counterpart, it does not inherit a proof of stability for nonlinear systems.
The stability of the EKF-based LQR control approach can only be guaranteed for sufficiently small attitude values. However, the detection of the corresponding stability domain is hard to perform and would require an a posteriori application of Lyapunov techniques. This is avoided by the proposed LMI technique, which performs the stability proof of the inner control loop directly during its design. This stability property is preserved as long as the outer velocity and position controllers lead to inputs for the inner control loop that do not violate the a priori specified state constraints. For a nominal operation, i.e., for a system without actuator faults, this can be achieved by appropriate trajectory planning. Finally, it should be pointed out that the LMI-based procedure has the significant advantage of a smaller computational effort during the online application and that it requires only the selection of two scalar tuning parameters in contrast to the weights for each of the states and control inputs in the LQR design.
Future work will deal with an experimental validation of the novel LMI-based joint control and observer parameterization for numerous application scenarios such as a laboratory-scale twin rotor aerodynamic system.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}