
Approximations of an Equilibrium Problem without Prior Knowledge of Lipschitz Constants in Hilbert Spaces with Applications




Abstract
1. Introduction
2. Preliminaries
- (c1).
- (c2).
- A bifunction is said to be Lipschitz-type continuous [36] on if there exist constants such that
- (c3).
- for all and satisfy
- (c4).
- is convex and subdifferentiable on for each
- (i)
- (ii)
- if and only if
- (iii)
- (i)
- (ii)
- .
3. Main Results
| Algorithm 1 (Explicit Accelerated Strong Convergence Iterative Scheme) |
|
4. Applications to Solve Fixed-Point Problems
- (c1*)
- (c2*)
- A mapping that is weakly sequentially continuous on if
5. Applications to Solve Variational-Inequality Problems
- (1)
- The solution set of problem (VIP) denoted by is nonempty.
- (2)
- An operator is said to be pseudomonotone if
- (3)
- An operator is said to be Lipschitz continuous through , such that
- (4)
- for all and satisfy
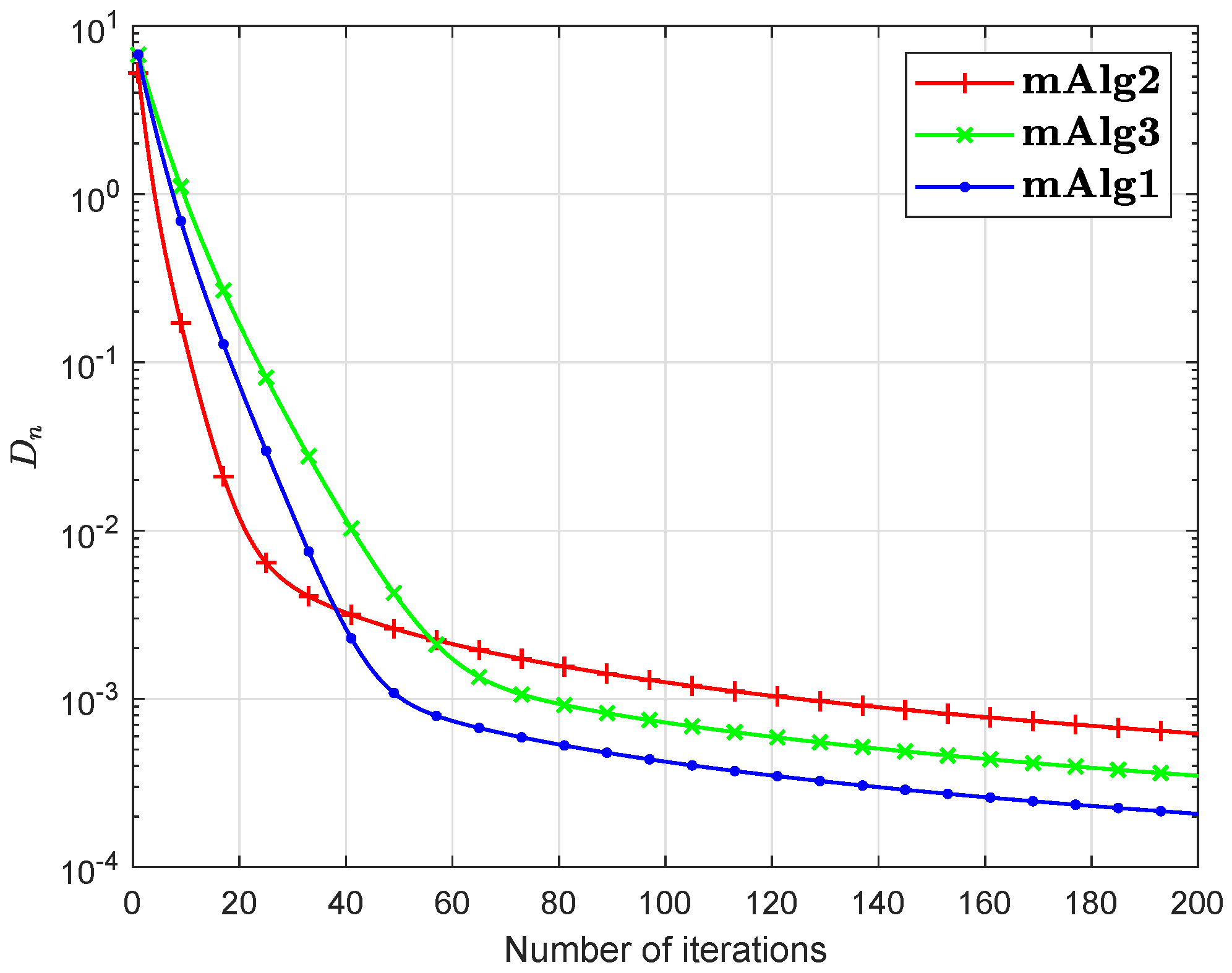
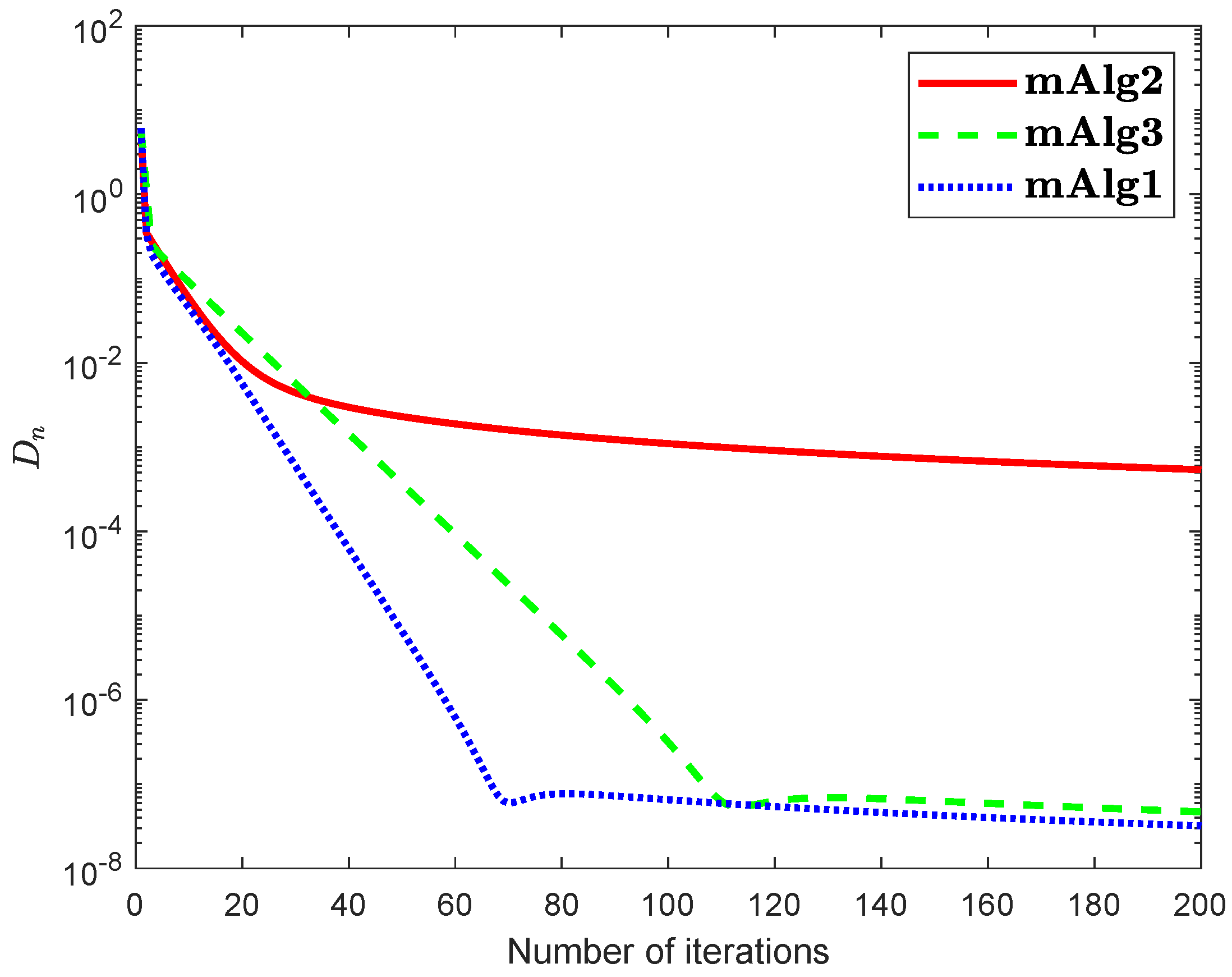
6. Numerical Illustrations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Fan, K. A Minimax Inequality and Applications, Inequalities III; Shisha, O., Ed.; Academic Press: New York, NY, USA, 1972. [Google Scholar]
- Muu, L.; Oettli, W. Convergence of an adaptive penalty scheme for finding constrained equilibria. Nonlinear Anal. Theory Methods Appl. 1992, 18, 1159–1166. [Google Scholar] [CrossRef]
- Blum, E. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Bigi, G.; Castellani, M.; Pappalardo, M.; Passacantando, M. Existence and solution methods for equilibria. Eur. J. Oper. Res. 2013, 227, 1–11. [Google Scholar] [CrossRef]
- Antipin, A. Equilibrium programming: Proximal methods. Comput. Math. Math. Phys. 1997, 37, 1285–1296. [Google Scholar]
- Giannessi, F.; Maugeri, A.; Pardalos, P.M. Equilibrium Problems: Nonsmooth Optimization and Variational Inequality Models; Kluwer Academic Publisher: Dordrecht, The Netherlands, 2006; Volume 58. [Google Scholar]
- Dafermos, S. Traffic Equilibrium and Variational Inequalities. Transp. Sci. 1980, 14, 42–54. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Cho, Y.J.; Yordsorn, P. Weak convergence of explicit extragradient algorithms for solving equilibirum problems. J. Inequalities Appl. 2019, 2019. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Pakkaranang, N.; Kumam, P.; Cho, Y.J. Modified subgradient extragradient method for a family of pseudomonotone equilibrium problems in real a Hilbert space. J. Nonlinear Convex Anal. 2020, 21, 2011–2025. [Google Scholar]
- Ur Rehman, H.; Kumam, P.; Dong, Q.L.; Cho, Y.J. A modified self-adaptive extragradient method for pseudomonotone equilibrium problem in a real Hilbert space with applications. Math. Methods Appl. Sci. 2020, 44, 3527–3547. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Sitthithakerngkiet, K. Viscosity-type method for solving pseudomonotone equilibrium problems in a real Hilbert space with applications. AIMS Math. 2021, 6, 1538–1560. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Gibali, A.; Kumam, W. Convergence analysis of a general inertial projection-type method for solving pseudomonotone equilibrium problems with applications. J. Inequalities Appl. 2021, 2021. [Google Scholar] [CrossRef]
- Rehman, H.U.; Kumam, P.; Dong, Q.L.; Peng, Y.; Deebani, W. A new Popov’s subgradient extragradient method for two classes of equilibrium programming in a real Hilbert space. Optimization 2020, 1–36. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Shutaywi, M.; Alreshidi, N.A.; Kumam, W. Inertial Optimization Based Two-Step Methods for Solving Equilibrium Problems with Applications in Variational Inequality Problems and Growth Control Equilibrium Models. Energies 2020, 13, 3292. [Google Scholar] [CrossRef]
- Ferris, M.C.; Pang, J.S. Engineering and Economic Applications of Complementarity Problems. Siam Rev. 1997, 39, 669–713. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Cho, Y.J.; Suleiman, Y.I.; Kumam, W. Modified Popov’s explicit iterative algorithms for solving pseudomonotone equilibrium problems. Optim. Methods Softw. 2020, 36, 82–113. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Abubakar, A.B.; Cho, Y.J. The extragradient algorithm with inertial effects extended to equilibrium problems. Comput. Appl. Math. 2020, 39. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Pakkaranang, N.; Hussain, A.; Wairojjana, N. A modified extra-gradient method for a family of strongly pseudomonotone equilibrium problems in real Hilbert spaces. J. Math. Comput. Sci. 2020, 22, 38–48. [Google Scholar] [CrossRef]
- Wairojjana, N.; ur Rehman, H.; Argyros, I.K.; Pakkaranang, N. An Accelerated Extragradient Method for Solving Pseudomonotone Equilibrium Problems with Applications. Axioms 2020, 9, 99. [Google Scholar] [CrossRef]
- Wairojjana, N.; ur Rehman, H.; la Sen, M.D.; Pakkaranang, N. A General Inertial Projection-Type Algorithm for Solving Equilibrium Problem in Hilbert Spaces with Applications in Fixed-Point Problems. Axioms 2020, 9, 101. [Google Scholar] [CrossRef]
- Wairojjana, N.; Pakkaranang, N.; Ur Rehman, H.; Pholasa, N.; Khanpanuk, T. Strong Convergence of Extragradient-Type Method to Solve Pseudomonotone Variational Inequalities Problems. Axioms 2020, 9, 115. [Google Scholar] [CrossRef]
- Wairojjana, N.; Younis, M.; Ur Rehman, H.; Pakkaranang, N.; Pholasa, N. Modified Viscosity Subgradient Extragradient-Like Algorithms for Solving Monotone Variational Inequalities Problems. Axioms 2020, 9, 118. [Google Scholar] [CrossRef]
- Tran, D.Q.; Dung, M.L.; Nguyen, V.H. Extragradient algorithms extended to equilibrium problems. Optimization 2008, 57, 749–776. [Google Scholar] [CrossRef]
- Korpelevich, G. The extragradient method for finding saddle points and other problems. Matecon 1976, 12, 747–756. [Google Scholar]
- Hieu, D.V.; Quy, P.K.; Vy, L.V. Explicit iterative algorithms for solving equilibrium problems. Calcolo 2019, 56. [Google Scholar] [CrossRef]
- Polyak, B. Some methods of speeding up the convergence of iteration methods. USSR Comput. Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A Fast Iterative Shrinkage-Thresholding Algorithm for Linear Inverse Problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Hung, P.G.; Muu, L.D. The Tikhonov regularization extended to equilibrium problems involving pseudomonotone bifunctions. Nonlinear Anal. Theory Methods Appl. 2011, 74, 6121–6129. [Google Scholar] [CrossRef]
- Konnov, I. Application of the Proximal Point Method to Nonmonotone Equilibrium Problems. J. Optim. Theory Appl. 2003, 119, 317–333. [Google Scholar] [CrossRef]
- Moudafi, A. Proximal point algorithm extended to equilibrium problems. J. Nat. Geom. 1999, 15, 91–100. [Google Scholar]
- Oliveira, P.; Santos, P.; Silva, A. A Tikhonov-type regularization for equilibrium problems in Hilbert spaces. J. Math. Anal. Appl. 2013, 401, 336–342. [Google Scholar] [CrossRef]
- Mann, W.R. Mean value methods in iteration. Proc. Am. Math. Soc. 1953, 4, 506. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. The Subgradient Extragradient Method for Solving Variational Inequalities in Hilbert Space. J. Optim. Theory Appl. 2010, 148, 318–335. [Google Scholar] [CrossRef]
- Hieu, D.V. Halpern subgradient extragradient method extended to equilibrium problems. Rev. Real Acad. Cienc. Exactas FÍSicas Nat. Ser. Matemíticas 2016, 111, 823–840. [Google Scholar] [CrossRef]
- Bianchi, M.; Schaible, S. Generalized monotone bifunctions and equilibrium problems. J. Optim. Theory Appl. 1996, 90, 31–43. [Google Scholar] [CrossRef]
- Mastroeni, G. On Auxiliary Principle for Equilibrium Problems. In Nonconvex Optimization and Its Applications; Springer: New York, NY, USA, 2003; pp. 289–298. [Google Scholar] [CrossRef]
- Tiel, J.V. Convex Analysis: An Introductory Text, 1st ed.; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Kreyszig, E. Introductory Functional Analysis with Applications, 1st ed.; Wiley: New York, NY, USA, 1989. [Google Scholar]
- Xu, H.K. Another control condition in an iterative method for nonexpansive mappings. Bull. Aust. Math. Soc. 2002, 65, 109–113. [Google Scholar] [CrossRef]
- Maingé, P.E. Strong Convergence of Projected Subgradient Methods for Nonsmooth and Nonstrictly Convex Minimization. Set Valued Anal. 2008, 16, 899–912. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces, 2nd ed.; CMS Books in Mathematics; Springer International Publishing: New York, NY, USA, 2017. [Google Scholar]
- Browder, F.; Petryshyn, W. Construction of fixed points of nonlinear mappings in Hilbert space. J. Math. Anal. Appl. 1967, 20, 197–228. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.; Ping, P.; Cho, Y.; Guo, H. New extragradient methods with non-convex combination for pseudomonotone equilibrium problems with applications in Hilbert spaces. Filomat 2019, 33, 1677–1693. [Google Scholar] [CrossRef]
- Stampacchia, G. Formes bilinéaires coercitives sur les ensembles convexes. Comptes Rendus Hebd. Seances Acad. Sci. 1964, 258, 4413. [Google Scholar]
- Konnov, I.V. On systems of variational inequalities. Russ. Math. C/C Izv. Vyss. Uchebnye Zaved. Mat. 1997, 41, 77–86. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Execution Time in Seconds | |||
|---|---|---|---|
| mAlg2 | mAlg3 | mAlg1 | |
| 5 | 2.55846812 | 2.73622248 | 2.923849848 |
| 10 | 2.89823133 | 2.99853685 | 3.341848537 |
| 20 | 3.23847254 | 3.51835212 | 3.332562246 |
| 50 | 3.93645046 | 4.05462157 | 4.084188882 |
| 100 | 4.57837436 | 5.32873548 | 5.723835682 |
| 200 | 5.86241836 | 6.28194713 | 6.825465869 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khanpanuk, C.; Pakkaranang, N.; Wairojjana, N.; Pholasa, N. Approximations of an Equilibrium Problem without Prior Knowledge of Lipschitz Constants in Hilbert Spaces with Applications. Axioms 2021, 10, 76. https://doi.org/10.3390/axioms10020076
Khanpanuk C, Pakkaranang N, Wairojjana N, Pholasa N. Approximations of an Equilibrium Problem without Prior Knowledge of Lipschitz Constants in Hilbert Spaces with Applications. Axioms. 2021; 10(2):76. https://doi.org/10.3390/axioms10020076
Chicago/Turabian StyleKhanpanuk, Chainarong, Nuttapol Pakkaranang, Nopparat Wairojjana, and Nattawut Pholasa. 2021. "Approximations of an Equilibrium Problem without Prior Knowledge of Lipschitz Constants in Hilbert Spaces with Applications" Axioms 10, no. 2: 76. https://doi.org/10.3390/axioms10020076
APA StyleKhanpanuk, C., Pakkaranang, N., Wairojjana, N., & Pholasa, N. (2021). Approximations of an Equilibrium Problem without Prior Knowledge of Lipschitz Constants in Hilbert Spaces with Applications. Axioms, 10(2), 76. https://doi.org/10.3390/axioms10020076