1. Introduction
In 1970–1971, E.F. Keller and L.A. Segel published a remarkable papers [
1,
2], which they constructed the mathematical model for describing the chemotactic interaction of amoebae mediated by the chemical (acrasin) in. Nowadays their model is called the Keller–Segel model and used for modeling a wide range of processes in biology and medicine. The one-dimensional (with respect to the space variable) version of the Keller–Segel model reads as
where unknown functions
and
describe the densities of cells (species) and chemicals, respectively,
t and
x denote the time and space variables, respectively,
and
are the diffusivities of cells (species) and chemicals, while
and
are known non-negative smooth functions. The function
(usually a constant
) is called the chemotactic sensitivity. Nowadays a wide range of simplifications of the Keller–Segel model are used for modeling processes in biology and medicine. Here we restrict ourselves on the (1+2)-dimensional Keller–Segel system of the form [
3,
4,
5,
6]
where the parameters
and β are non-negative constants, moreover,
(otherwise the model loses its biological meaning). Nowadays, System (2), including the special case
, is extensively examined by means of different mathematical techniques, in particular, several talks were devoted to this model at a special session within 10th AIMS Conference [
7,
8].
However, to the best of our knowledge, there are no papers devoted to application of the Lie symmetry method for investigation of System (2), notably for construction of exact solutions. In this paper, we show that this nonlinear system with
is invariant with respect infinite-dimensional Lie algebra generated by the operators involving three arbitrary functions, which depend on the time variable. Moreover, the corresponding Neumann boundary-value problems also admit infinite-dimensional Lie algebras. Using these algebras we find exact solutions for (1+1) and (1+2)-dimensional BVPs. This research is a natural continuation of the recent paper [
9].
The paper is organized as follows: in
Section 2 maximal algebras of invariance (MAIs) of the Keller–Segel system and corresponding Neumann boundary-value problems are presented.
Section 3 is devoted to the application of the Lie symmetry operators for finding exact solutions of some Neumann boundary-value problems with correctly specified parameters. It is also proved that the boundary value problem for the (1+1)-dimensional Keller–Segel system with specific boundary conditions can be linearized and solved in an explicit form. The results are summarized in Conclusions.
2. Lie Symmetry of the Neumann Boundary-Value Problem
First of all, one notes that all the parameters, excepting β, can be dropped in System (2) if one introduces non-dimensional variables using the standard re-scaling procedure,
i.e., this simplified Keller–Segel system is equivalent to
where
. Obviously, one may set
provided
in (2), hence the nonlinear system
is obtained.
Theorem 1. Maximal algebra of invariance (MAI) of the (1+2) KS System (4) is the infinite-dimensional Lie algebra generated by the operatorswhere ,
and are arbitrary function, which possess derivatives of any order.
Proof of the theorem is obtained by straightforward calculations using the well-known technique created by Sophus Lie in 80s of 19 century. Nowadays this routine can be done using computer algebra packages therefore we used Maple 16.
Remark. Maximal algebra of invariance of System (3) with
is the trivial Lie algebra with the basic Lie symmetry operators
It should be noted that the infinite-dimensional Lie algebra generated by Operators (5) contains as a subalgebra the well-known Galilei algebra
(see, e.g., [
10]) with the basic operators
and its extension
with the additional operator
D. Here the operators
and
produce the celebrated Galilei transformations.
Commutators of the MAI (5) are presented in
Table 1.
Table 1.
Commutators of the maximal algebras of invariance (MAI) (5).
Table 1.
Commutators of the maximal algebras of invariance (MAI) (5).
| | | | | | | D |
|---|
| 0 | 0 | 0 | | | |
| | 0 | 0 | | | |
| | | 0 | | 0 | |
| | | | 0 | 0 | |
| | | | | 0 | 0 |
| D | | | | | | 0 |
It is well-known that a PDE (system of PDEs) cannot model any real process without additional condition(s) on unknown function(s). Thus, boundary-value problems (BVPs) based on the chemotaxis systems of the form (1) are usually studied (see [
2,
3,
11,
12] and papers cited therein). In most of these papers authors investigate Neumann problems with zero-flux boundary conditions. Here we examine the Neumann problem for System (4) in half-plane
where
and
are arbitrary functions, which possess derivatives of any order.
Obviously, Lie algebra (5) cannot be MAI of the BVP (6) for arbitrary functions
and
. Moreover, BVP (6) involves conditions at infinity, so one cannot apply the definition [
13,
14] in order to examine Lie invariance of this problem. Here we adapt for such purpose the definition proposed in [
15].
First, let us calculate the linear combination for all the operators listed in (5).
and its first prolongation
where
to be determined parameters.
Using Definition 2 [
15] we formulate the following invariance criteria.
Definition 1. BVP (6) is invariant w.r.t. the Lie operator (7) if:- (a)
Operator (7) is a Lie symmetry operator of System (4);
- (b)
when ;
- (c)
when and when ;
- (d)
there exists a smooth bijective transform T mapping into of the same dimensionality;
- (e)
when ;
- (f)
when , and when , , or . Where are new variables, is operator X expressed via the new variables and the functions and are defined by T.
Let us apply this definition to BVP (6).
Taking into account item (b) one immediately obtains the condition which means that .
Now we apply the operator
to the manifolds
and
(item (c))
Thus two conditions are obtained:
Let us consider the following change of variables, which was used in [
15] for the similar purposes, in order to examine items (d)–(f)
By direct calculations we have proved that Transform (9) maps
into
. Since both manifolds have the same dimensionality, item (d) is fulfilled. Transform (9) maps Operator X (7) (here we take into account that
) to the form
Now it is easy to check items (e)–(f)
Thus we only need to satisfy Conditions (8). It can be noted that these conditions lead to four different possibilities only:
if and are arbitrary function, which possess derivatives of any order, then , i.e., ;
if , , where , then (here and are no longer arbitrary);
if , then , i.e., ;
if then .
Let us formulate the result as follows (we set without losing a generality).
Theorem 2. All possible MAIs of the (1+2)-dimensional Neumann boundary-value problem (6) depending on the form of the functions and are presented in Table 2. In Table 2 and .
Table 2.
MAIs and restrictions for Neumann BVP (6).
Table 2.
MAIs and restrictions for Neumann BVP (6).
| | | | MAI |
|---|
| 1 | ∀ | ∀ | |
| 2 | | | |
| 3 | | | |
| 4 | 0 | 0 | |
3. Exact Solutions of Neumann Problems
This section is devoted to the applying of Lie symmetry operators obtained in Theorem 2 in order to reduce the Neumann BVP (6) to BVPs of lower dimensionality and find exact solutions.
In the most general case we apply a linear combination of operators
and
(case 1, Theorem 2):
This operator generates ansatz
Ansatz (10) reduces BVP (6) to the (1+1)-dimensional BVP
Let us consider special case of BVP (11):
and
,
. In this case the Nonlinear problem (11) can be presented as follows
In reality (12) and (13) is the (1+1)-dimensional analog of the (1+2)-dimensional BVP (6) with
. System (12) can be reduced to the 3-rd order PDE
where
is an arbitrary function. Setting
, using the Cole–Hopf substitution
and taking into account the Boundary conditions (13), we obtain BVP problem for the heat equation
In order to solve (15) by using the classical technique, we should specify an initial profile. Let us set for simplicity
. Now one may use Laplace transform
to reduce heat equation to the 2nd order ODE
with boundary conditions
The general solution of BVP (16) and (17) is
By using the inverse Laplace transform (see for example [
16]) and the relevant simplifications one obtains the general solution of the Linear BVP (15)
Now, by using Cole-Hopf substitution (14), one finds the exact solution for the Nonlinear problem (12) and (13)
where
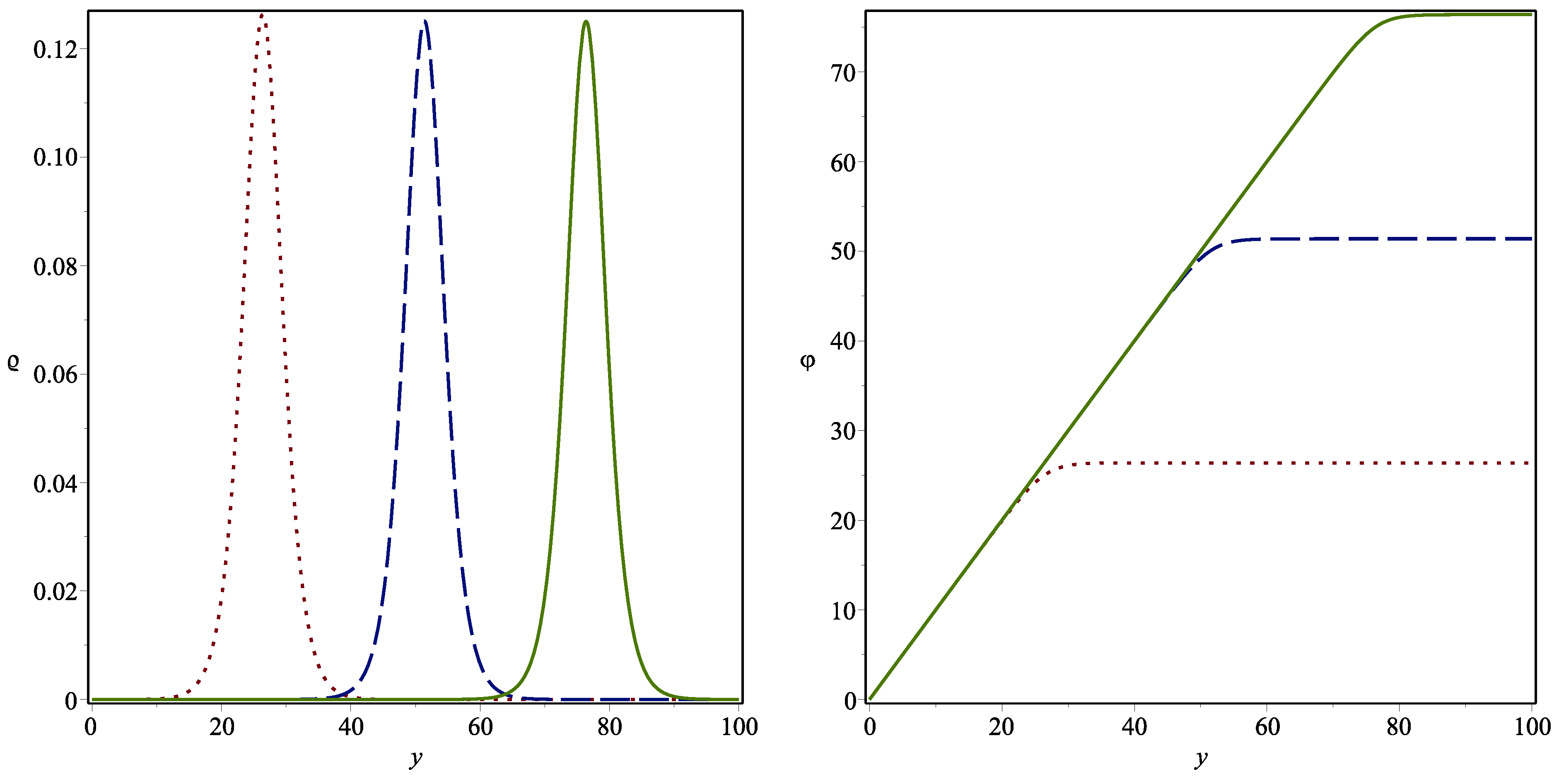
is an arbitrary smooth function. Plots of Solution (18) are presented on
Figure 1. It should be noted that the very similar profile of the function ρ which describes density of cells was presented in many papers (see, e.g., [
2,
17,
18,
19]). However, in papers [
2,
17,
18] the traveling wave solutions were found, and in [
19] the numerical ones. So the exact Solution (18) is new because it is neither traveling wave solution nor numerical. It possesses much more complicated structure. Nevertheless this profile of the function ρ represents the traveling band of cells. This phenomenon was studied by J. Adler in his experiments which were described in [
20].
Figure 1.
Plots of functions and with and (dot line), (dash line), (solid line).
Figure 1.
Plots of functions and with and (dot line), (dash line), (solid line).
Consider Case 2 in
Table 2. The linear combination of operators
produces the following ansatz
where
is an arbitrary smooth function.
This ansatz reduces BVP (6) to the elliptic BVP
It can be easily established that System (20) is invariant w.r.t. the 4-dimensional MAI generated by the operators
In quite a similar way as it was done for BVP (6) we have proved that only operators
and
are the Lie symmetry operators of BVP (20) and (21). The linear combination of these operators
produces ansatz:
which reduces the Elliptic BVP (20) and (21) to the problem for the second-order ODEs
Unfortunately we were unable to solve BVP (22) because the governing system of ODEs is non-integrable. Happily we noted that BVP (20) and (21) is invariant w.r.t. the Q-conditional symmetry operator
(in the sense of Definition 2 [
15]). The ansatz generated by the operator
has the form
In contrast to the previous ansatz, this one reduces BVP (20) and (21) to the simpler system of ODEs
with boundary conditions
System (24) can be reduced to the 4-th order ODE
By integrating this equation twice and then using substitution
, one can obtain the first order ODE
where
.
In order to construct the general solution of Equation (26), we apply the substitution (see, e.g., [
21])
Now the linear ODE
is obtained with the general solution:
where
and
is Kummer’s function
Because Kummer’s functions lead to a very cumbersome solution of BVP in question, we consider the special case
(let us note that more general case
leads to the same result because of the Boundary conditions (25). In this case Equation (26) has the general solution
From the Boundary condition (25) follows
, hence
Now one obtains the general solution of BVP (24) and (25)
Since
one can calculate that
. Thus, the exact solution of BVP (6) with
and
has the form
where
is an arbitrary smooth function. Solution (29) is continuous when
.
4. Conclusions
In this work we studied a simplified version of (1+2)-dimensional Keller–Segel model. It is well-known that Keller–Segel model is widely used for modeling a wide range of processes in biology and medicine (especially for the tumour growth modeling) therefore one is extensively examined by means of different mathematical techniques.
It was established that MAI of System (4) is the infinite-dimensional Lie algebra. Moreover we have proved that different Neumann BVPs for this system of the form (6) still admit infinite-dimensional Lie algebras depending on the form of fluxes
and
. Using the definition from [
15], all inequivalent problems of the form (6) were found, which admit different MAIs (see Theorem 2).
In order to construct the exact solutions of some Neumann problems, the Lie symmetry operators were applied. In particular, we have proved that the BVP for the one-dimensional (in space) Keller–Segel system in question can be linearized. As result, the exact solution of the BVP was constructed in explicit form (18). It should be stressed that this solution has a remarkable properties, which allow a biological interpretation.
Finally, the exact solution for the (1+2)-dimensional BVP with the correctly specified boundary conditions was found (see Formula (29)).



{kind=link}
