
Positioning-Based Uplink Synchronization Method for NB-IoT in LEO Satellite Networks

Abstract
1. Introduction
1.1. Related Work
1.2. Contributions
- (1)
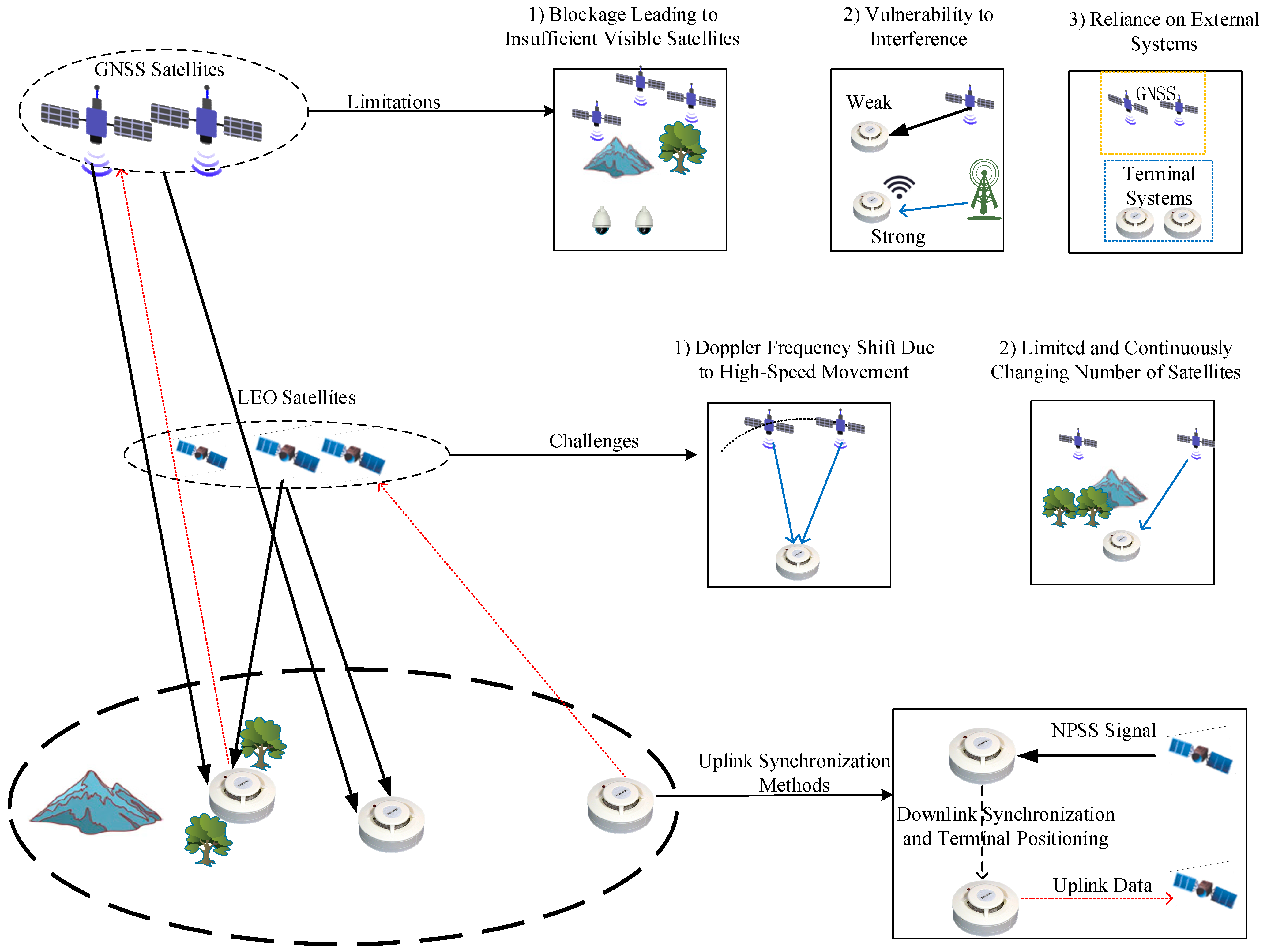
- Position-aided uplink synchronization for NB-IoT terminals: To address the challenges of large Doppler shifts and varying numbers of visible satellites in LEO satellite scenarios, we propose a position-aided uplink synchronization method. Observation values are obtained through NPSS detection, and a TDOA equation is constructed to estimate the terminal’s position, which is then combined with satellite ephemeris to complete uplink synchronization.
- (2)
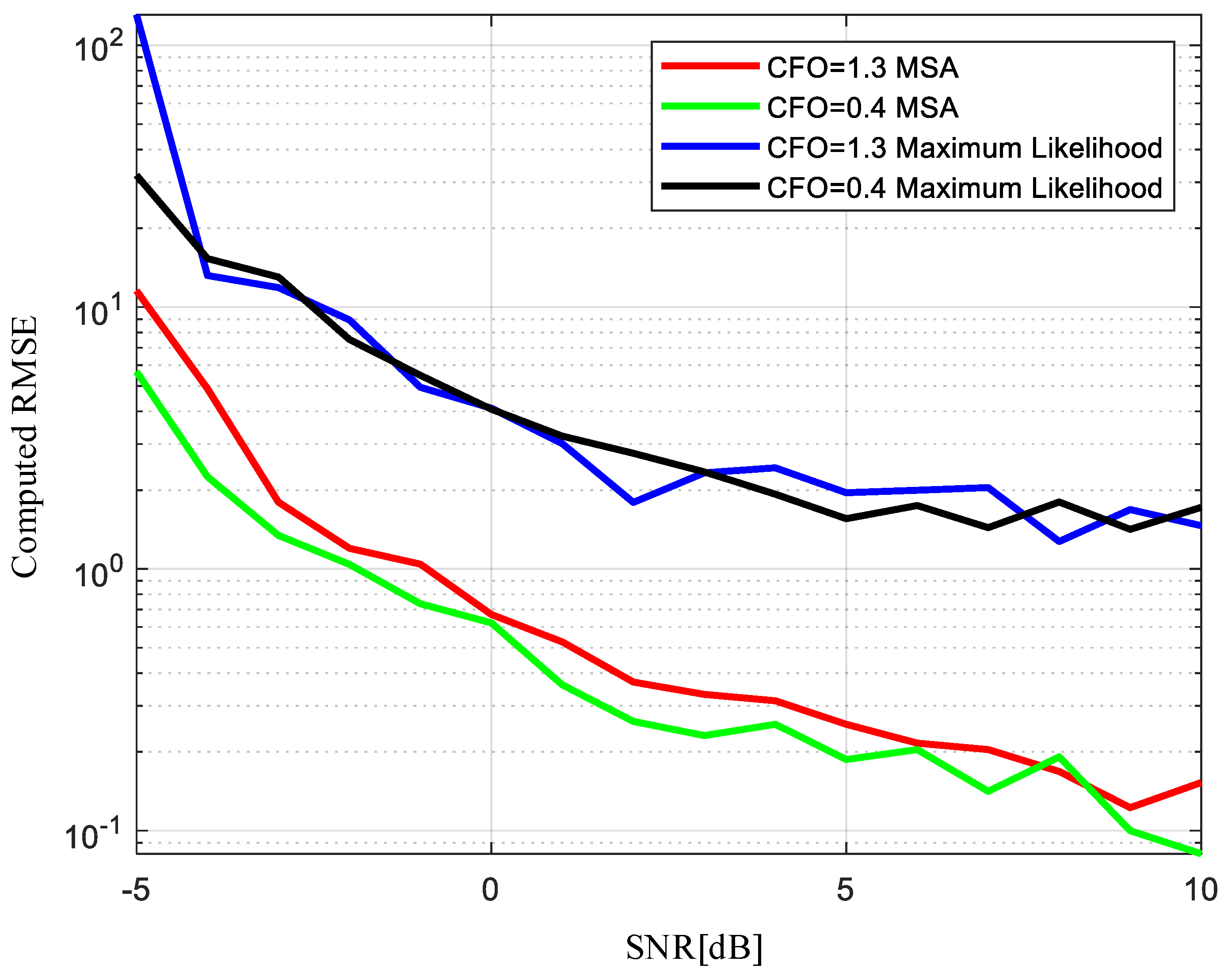
- Multiple Segment Auto-correlation (MSA) detection method for NPSS: To cope with the detection of NPSSs under the high-dynamics and large Doppler shift conditions of LEO satellites, we propose the MSA algorithm, which exploits the symmetry of NPSSs. This algorithm leverages the time-domain repetition property of the NPSS to achieve robust acquisition of timing and frequency observation values under severe Doppler conditions.
- (3)
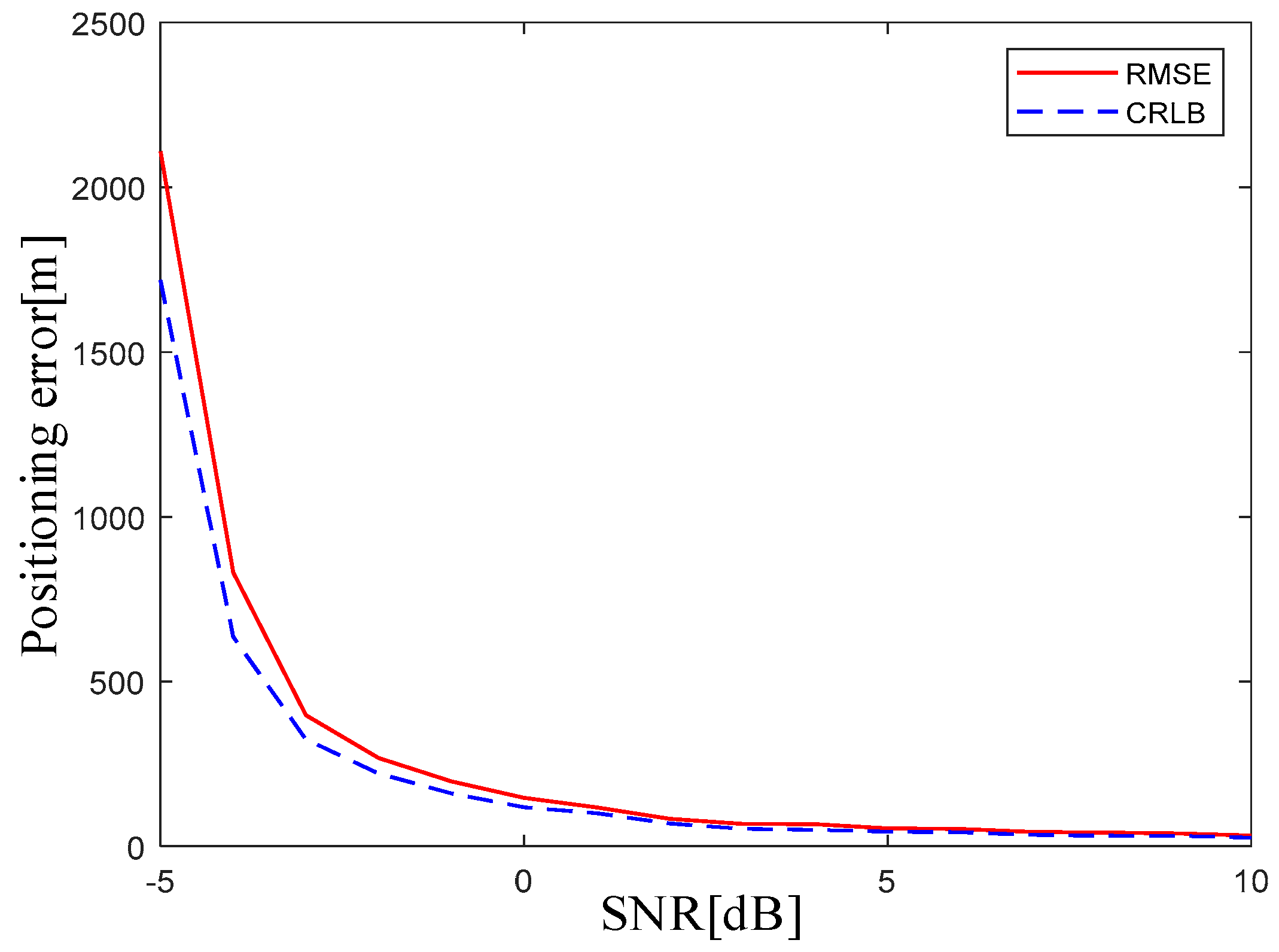
- Terminal positioning via NPSS-based delay observations: Based on the time delay observations from NPSSs, we establish TDOA equations under different numbers of visible satellites to estimate the terminal position. Furthermore, we derive the Cramér–Rao lower bound (CRLB) and analyze the power consumption characteristics of IoT terminals. Under an SNR ratio of −2 dB, the positioning error can be maintained at around 200 m.
- (4)
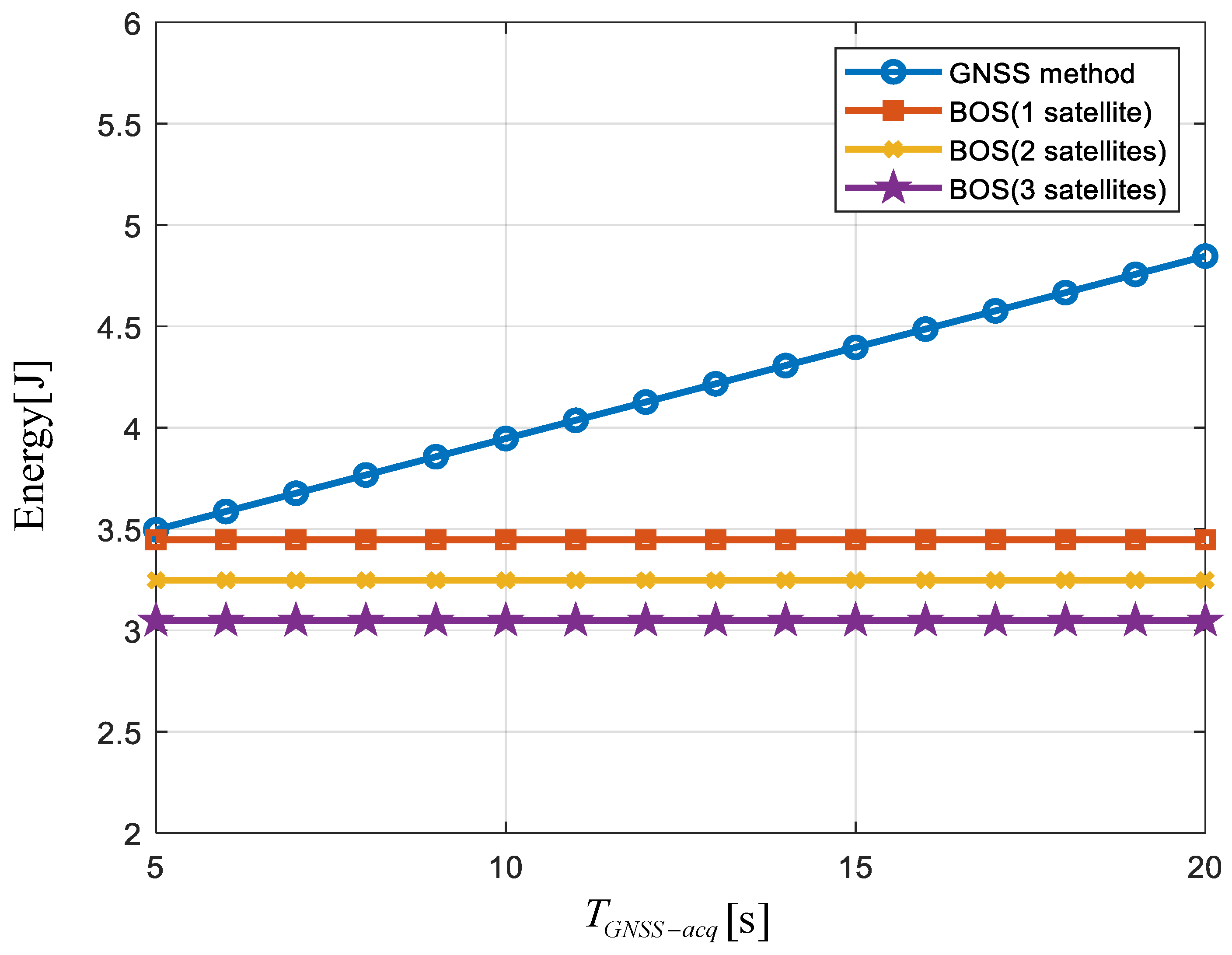
- Simulation under the Iridium constellation: We simulate the performance of the proposed algorithm under the Iridium satellite constellation configuration. The simulation results demonstrate that the approach proposed in this paper reduces terminal power consumption by 15–40% while still meeting the uplink synchronization requirements of the NB-IoT system.
2. System Model
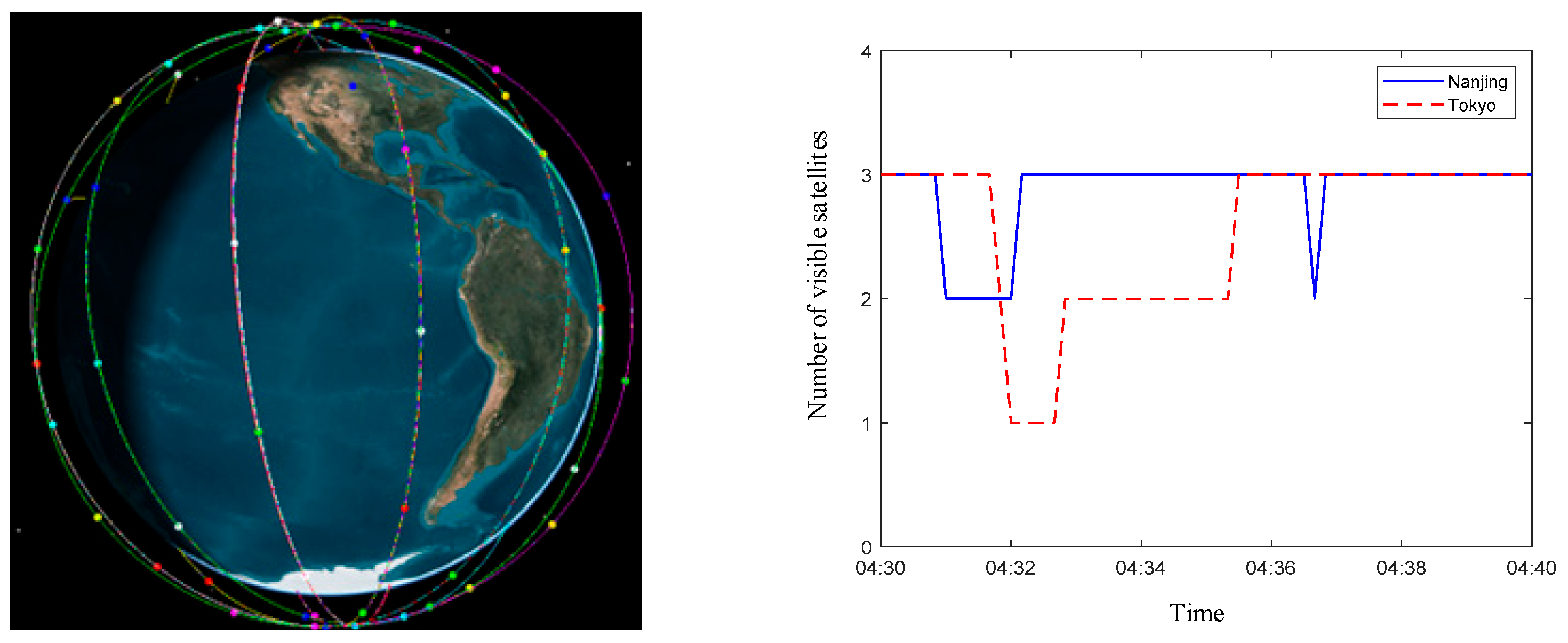
2.1. Problem Scenario and Technical Challenges
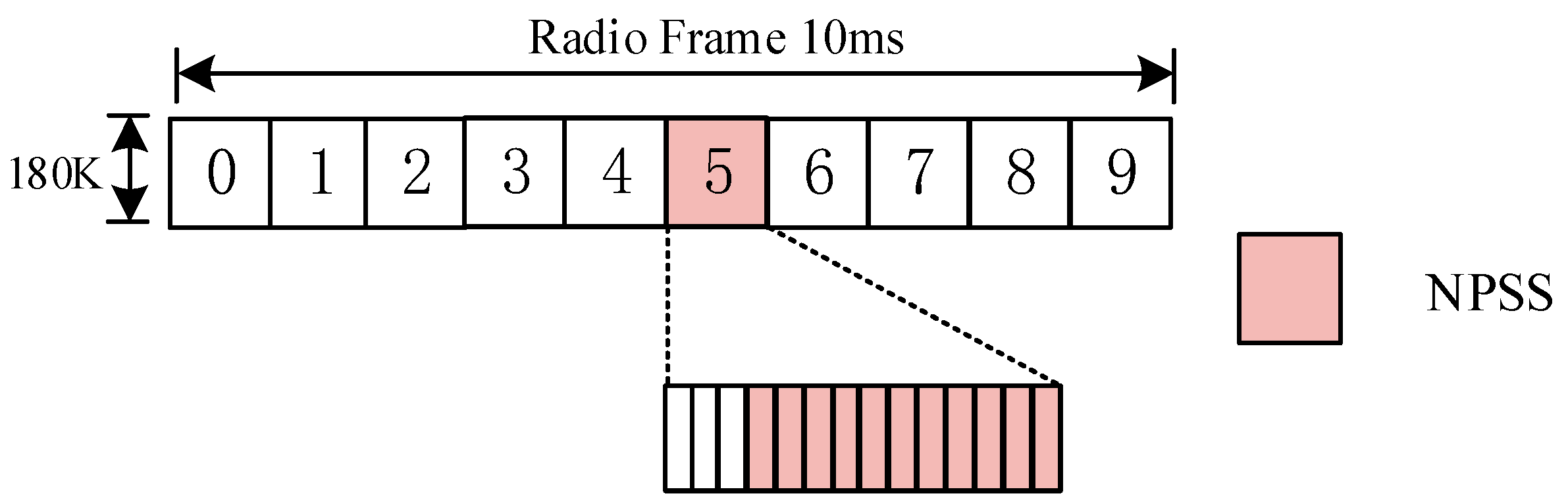
2.2. Downlink NPSS in NB-IoT
3. Position-Aided Uplink Synchronization Method
3.1. NPSS Detection
3.1.1. Coarse Estimation of Time Delay Observations
- (I)
- When the current sampling point is located in the middle of an OFDM symbol or outside the NPSS, the result is small due to the correlation properties of the ZC sequence.
- (II)
- ; When the current sampling point corresponds to the start position of the NPSS, a peak appears. Due to the time-domain repetition property of NPSS, the 11 OFDM symbols starting from the beginning are identical. Our algorithm fully exploits this characteristic, so we can get . The resulting metric is calculated as follows:In the final result, is a fixed constant, and is unaffected by carrier frequency offset . Therefore, the resulting peak is not influenced by Doppler shift. At this point, the values corresponding to different are similar, and the minimum among them is taken as the metric value at sampling point .
- (III)
- When the current sampling point is located at an integer multiple of the OFDM symbol interval adjacent to the actual synchronization point, a peak may also appear. However, the resulting values of vary significantly across different values. The minimum is approximately equivalent to the correlation value with uncorrelated noise , resulting in a small metric value at sampling point .
3.1.2. Fine Estimation of Time Delay Observations
3.1.3. Frequency Offset Estimation Algorithm
| Algorithm 1: NPSS Detection Algorithm |
| Input: System model parameters, received signal. |
| Output: Time synchronization point, doppler frequency offset. |
| 1: For all d, do |
| 2: Divide the 11N-length signal into . |
| 3: For m = 1 to 11, do |
| 4: Calculate ; |
| 5: Calculate and select the maximum value point as the coarse synchronization point ; |
| End for |
| 6: For n = to , do |
| 7: Compute the FFT of N-length signal ; |
| 8: Calculate ; select the maximum value point as the fine synchronization point ; |
| End for |
| 9: Compute the FFT of the N-length signal located at point , ; |
| 10: Perform the correlation operation on and ; |
| 11: Obtain by finding by the maximum value; |
| 12: Calculate by ; |
| 13: End |
3.2. TDOA Positioning
3.2.1. Scenario 1: Three Satellites Visible
3.2.2. Scenario 2: Dual Satellite Visibility
3.2.3. Scenario 3: Single-Satellite Visibility
| Algorithm 2: TDOA Localization Algorithm |
| Input: Satellite positions, NPSS detection time within 10 ms, detection interval time . |
| Output: Terminal location. |
| 1: Initialize |
| 2: Detect the number of NPSSs within 10 ms, record the arrival time |
| 3: While , do |
| 4: Calculate using Formula (19) and Obtain using Formula (23); |
| 5: While , do |
| 6: Record the arrival time , enter PSM mode for time then update ; |
| 7: Jump to step 3 if , record the first arrival time ; |
| 8: Calculate using Formula (25) and obtain using Formula (23); |
| 9: While , do |
| 10: Record the arrival time , enter PSM mode for time, then update ; |
| 11: Jump to step 3 if , calculate using Formula (27), and obtain using Formula (25) if ; |
| 12: Record the arrival time , enter PSM mode for time then update ; |
| 13: Jump to step 3 if , record the arrival time , calculate using Formula (28), and obtain using Formula (23); |
| 14: End |
3.3. Error Analysis
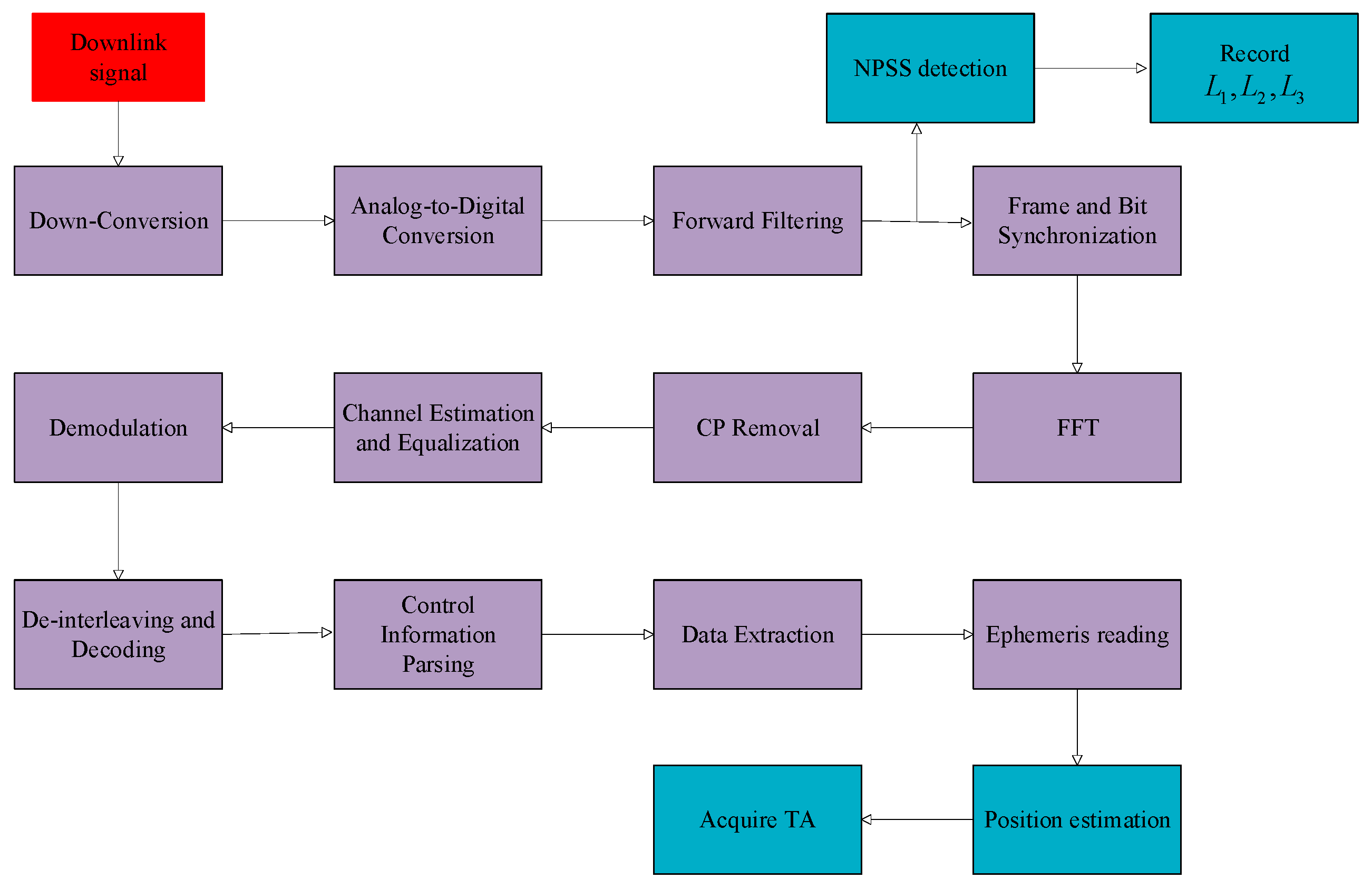
3.4. Receiver Architecture
3.5. Energy Consumption and Algorithm Complexity Analysis
4. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, M.; Dong, X.; Hu, M. Design and simulation for hybrid LEO communication and navigation constellation. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 1665–1669. [Google Scholar]
- Vaezi, M.; Azari, A.; Khosravirad, S.R.; Shirvanimoghaddam, M.; Azari, M.M.; Chasaki, D.; Popovski, P. Cellular, wide-area, and non-terrestrial IoT: A survey on 5G advances and the road toward 6G. IEEE Commun. Surv. Tutor. 2022, 24, 1117–1174. [Google Scholar] [CrossRef]
- Lin, J.; Hou, Z.; Zhou, Y.; Tian, L.; Shi, J. Map estimation based on Doppler characterization in broadband and mobile LEO satellite communications. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar]
- Hu, D.; Song, C. Design of the inter satellite link of low earth orbit mobile satellite communication systems. Radio Commun. Technol. 2017, 43, 11–15. [Google Scholar]
- Wang, A.; Wang, P.; Miao, X.; Li, X.; Ye, N.; Liu, Y. A review on non-terrestrial wireless technologies for smart city Internet of Things. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720936824. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.; Zhang, Q.; You, L.; Gao, X.Q.; Zheng, G. Robust multigroup multicast transmission for frame-based multi-beam satellite systems. IEEE Access 2018, 6, 46074–46083. [Google Scholar] [CrossRef]
- You, L.; Li, K.-X.; Wang, J.; Gao, X.Q.; Xia, X.-G.; Ottersten, B. Massive MIMO transmission for LEO satellite communications. IEEE J. Sel. Areas Commun. 2020, 38, 1851–1865. [Google Scholar] [CrossRef]
- Kapovits, A.; Corici, M.I.; Gheorghe-Pop, I.D.; Gavras, A.; Burkhardt, F.; Schlichter, T.; Covaci, S. Satellite communications integration with terrestrial networks. China Commun. 2018, 15, 22–38. [Google Scholar] [CrossRef]
- Pardhasaradhi, B.; Srinath, G.; Raghu, J.; Srihari, P. Position estimation in indoor using networked GNSS sensors and a range-azimuth sensor. Inf. Fusion. 2023, 89, 189–197. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, T.; Shin, H.-S. An efficient constrained weighted least squares method with bias reduction for TDOA-based localization. IEEE Sens. J. 2021, 21, 10122–10131. [Google Scholar] [CrossRef]
- Zhu, F.; Ba, T.; Zhang, Y.; Gao, X.; Wang, J. Terminal location method with NLOS exclusion based on unsupervised learning in 5G-LEO satellite communication systems. Int. J. Satell. Commun. Netw. 2020, 38, 425–436. [Google Scholar] [CrossRef]
- Lin, X.; Lin, Z.; Löwenmark, S.E.; Rune, J.; Karlsson, R. Doppler shift estimation in 5G new radio non-terrestrial networks. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar]
- Kodheli, O.; Astro, A.; Querol, J.; Gholamian, M.; Kumar, S.; Maturo, N.; Chatzinotas, S. Random access procedure over non-terrestrial networks: From theory to practice. IEEE Access 2021, 9, 109130–109143. [Google Scholar] [CrossRef]
- Janssen, T.; Koppert, A.; Berkvens, R.; Weyn, M. A survey on IoT positioning leveraging LPWAN, GNSS, and LEO-PNT. IEEE Internet Things J. 2023, 10, 11135–11159. [Google Scholar] [CrossRef]
- Wang, W.; Chen, T.; Ding, R.; Seco-Granados, G.; You, L.; Gao, X. Location-based timing advance estimation for 5G integrated LEO satellite communications. IEEE Trans. Veh. Technol. 2021, 70, 6002–6017. [Google Scholar] [CrossRef]
- Chandrika, V.R.; Chen, J.; Lampe, L.; Vos, G.; Dost, S. SPIN: Synchronization signal-based positioning algorithm for IoT nonterrestrial networks. IEEE Internet Things J. 2023, 10, 20846–20867. [Google Scholar] [CrossRef]
- Wei, Q.; Chen, X.; Ni, Z.; Jiang, C.; Huang, Z.; Zhang, S. Integrated Doppler positioning in a narrowband satellite system: Performance bound, parameter estimation, and receiver architecture. IEEE Internet Things J. 2024, 11, 10893–10910. [Google Scholar] [CrossRef]
- Xv, H.; Sun, Y.; Zhao, Y.; Peng, M.; Zhang, S. Joint beam scheduling and beamforming design for cooperative positioning in multi-beam LEO satellite networks. IEEE Trans. Veh. Technol. 2024, 73, 5276–5287. [Google Scholar] [CrossRef]
- Tao, T. Research on Positioning and Downlink Synchronization Technology of Low Earth Orbit Satellite Mobile Communication. Master’s Thesis, Southeast University, Nanjing, China, 2019. [Google Scholar]
- Tong, Y. Design of Time-Frequency Synchronization Technology for 5G Integrated Low Earth Orbit Satellite Mobile Communication Systems. Master’s Thesis, Southeast University, Nanjing, China, 2019. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Meaning | Value |
|---|---|---|
| Transmission power | 545 mW | |
| Reception power | 90 mW | |
| Power consumption during light sleep | 3 mW | |
| Power consumption during deep sleep | 0.015 mW | |
| Msg1 duration | 0.01 s | |
| Msg2 duration | 0.01 s | |
| Msg3 duration | 0.01 s | |
| Msg4 duration | 0.01 s | |
| RTT between UE and satellite | 0.03 s | |
| UL date duration | 0.5 s | |
| DRX cycle | 1 s | |
| PSM cycle | 100 s | |
| Power consumption of elevation sensor | 1 mW | |
| The number of GNSS satellites | 4 | |
| GNSS acquisition duration | 5–20 s | |
| GNSS tracking duration | 1 s |
| Algorithm | Complexity |
|---|---|
| MSA | |
| Maximum Likelihood |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, Q.; Hong, T.; Zhang, G. Positioning-Based Uplink Synchronization Method for NB-IoT in LEO Satellite Networks. Symmetry 2025, 17, 984. https://doi.org/10.3390/sym17070984
Qi Q, Hong T, Zhang G. Positioning-Based Uplink Synchronization Method for NB-IoT in LEO Satellite Networks. Symmetry. 2025; 17(7):984. https://doi.org/10.3390/sym17070984
Chicago/Turabian StyleQi, Qiang, Tao Hong, and Gengxin Zhang. 2025. "Positioning-Based Uplink Synchronization Method for NB-IoT in LEO Satellite Networks" Symmetry 17, no. 7: 984. https://doi.org/10.3390/sym17070984
APA StyleQi, Q., Hong, T., & Zhang, G. (2025). Positioning-Based Uplink Synchronization Method for NB-IoT in LEO Satellite Networks. Symmetry, 17(7), 984. https://doi.org/10.3390/sym17070984