Highlights
What are the main findings?
- Precision forestry has grown substantially since the early 2010s, driven by advances in UAV and LiDAR technologies.
- Nearly half of the reviewed studies focus on forest management and planning, with remote sensing platforms and sensors being the dominant tools.
What are the implications of the main findings?
- Although data collection and analysis in forestry have advanced significantly, the translation of these tools into fully automated, integrated, and widely adopted practices is lagging.
- Geographic disparities and an aging, undertrained workforce continue to limit adoption, underscoring the need for updated forestry curricula and stronger industry–academia collaboration.
Abstract
This review presents a synthesis of global research on precision forestry, a field that integrates advanced technologies to enhance—rather than replace—established tools and methods used in the operational forest management and the wood products industry. By evaluating 210 peer-reviewed publications indexed in Web of Science (up to 2025), the study identifies six main categories and eight components of precision forestry. The findings indicate that “forest management and planning” is the most common category, with nearly half of the studies focusing on this topic. “Remote sensing platforms and sensors” emerged as the most frequently used component, with unmanned aerial vehicle (UAV) and light detection and ranging (LiDAR) systems being the most widely adopted tools. The analysis also reveals a notable increase in precision forestry research since the early 2010s, coinciding with rapid developments in small UAVs and mobile sensor technologies. Despite growing interest, robotics and real-time process control systems remain underutilized, mainly due to challenging forest conditions and high implementation costs. The research highlights geographical disparities, with Europe, Asia, and North America hosting the majority of studies. Italy, China, Finland, and the United States stand out as the most active countries in terms of research output. Notably, the review emphasizes the need to integrate precision forestry into academic curricula and support industry adoption through dedicated information and technology specialists. As the forestry workforce ages and technology advances rapidly, a growing skills gap exists between industry needs and traditional forestry education. Equipping the next generation with hands-on experience in big data analysis, geospatial technologies, automation, and Artificial Intelligence (AI) is critical for ensuring the effective adoption and application of precision forestry.
1. Introduction
1.1. Background and Conceptual Framework for Precision Forestry
The exponential growth of data and associated analytical tools, increasing public interest in forest conservation problems, economic pressures, and rising demand for wood have transformed approaches to forest management planning worldwide. This has resulted in an increased demand for information about forests. Traditional forest management and supply chain systems have evolved into more comprehensive and integrated approaches, leveraging modern tools, technologies, and information and communication technologies (ICTs) at phenomenal scales. In this era, the precision forestry concept emerged around the millennia, primarily to enhance the productivity of actively managed forests [,,]. These research projects demonstrate the potential benefits for the adoption of precision forestry techniques in forest management organization.
Precision forestry has several definitions, each reflecting an individual’s perspective and area of expertise. Taylor et al. [] defined precision forestry as “planning and conducting site-specific forest management activities and operations to improve wood product quality and utilization, reduce waste, and increase profits, and maintain the quality of the environment”. Similarly, Kovacsova and Antalova [] described it as “the use of modern tools and techniques to get as much real information as it is possible to improve the decision-making process and to ensure that current targets of forest management are met”. Regardless of the specific definition, precision forestry typically employs advanced sensing technologies and analytical tools to provide highly repeatable measurements, actions, and processes for growing and harvesting trees, as well as monitoring other ecosystem goods and services [,]. These technologies and tools include remote sensing platforms and sensors, global navigation satellite systems (GNSSs) and wireless systems, mobile mapping using smartphones and tablets, geographic information systems (GISs) and computer-assisted design (CAD) or GIS/CAD, real-time process control scanners, visualization tools, robotics, and extensive knowledge bases. These capabilities are expected to improve forest management results through at least one of the following ways: (i) an improved control of operations with enhanced data collection, (ii) increased selectivity of prescriptions to match site and needs, for instance, soil nutrients and the genetic material of seedlings planted, (iii) automation of operations, from nurseries to wood logistics, and (iv) optimized decision-making with advanced analytics [].
Given its definition and associated tools, one might assume that the term “precision forestry” is analogous to “precision agriculture”, from which it likely originated. Indeed, several aspects of precision agriculture are directly applicable to forestry, especially during the reforestation stage when weed control is being applied. While the concept and practice of precision agriculture precedes that of precision forestry [], significant differences exist between the two concepts []. Perhaps the most important difference lies in the spatiotemporal scales of precision forestry, where measurements can range from the millimeter scale (e.g., analysis of soil organic matter) to the thousands of kilometers scale (e.g., global C stock maps) and span short timeframes (e.g., stomatal aperture analysis) to extended periods (e.g., monitoring C sequestration rates under future climate scenarios). Another key difference is the system-level heterogeneity and high variability inherent in forested landscapes []. Many forestlands are located in remote and rugged terrains that present challenges for the adoption of new technologies []. Repeated measurements of the same phenomenon in a forest environment can yield inconsistent results depending on spatial and temporal factors. Lastly, fine-scale observations or measurements are often aggregated into coarser scales in forestry to align with the requirements of models or decision support systems []. These differences, combined with the relatively slow uptake of modern technologies in local scale forest and wood processing industries [], underscore the need for a deeper understanding of the precision forestry concept, its advantages and disadvantages, and its practical implementation.
In this context, we develop a conceptual framework for precision forestry that identifies key drivers, tools, and gaps. As shown in Figure 1, precision forestry operates at the intersection of technological innovation, environmental stewardship, and socio-economic demands. Its adoption is influenced by three interrelated factors: technological advancements, environmental pressures, and workforce transitions. The proliferation of unmanned aerial vehicles (UAVs), light detection and ranging (LiDAR), and Artificial Intelligence (AI) has enabled high-resolution data collection and digital modeling. However, integration into operational workflows remains fragmented. Climate change and biodiversity loss necessitate adaptive forest management, yet precision tools are often siloed—for example, remote sensing for inventory versus robotics for conservation. Moreover, aging labor forces and skill gaps, particularly in data analytics, hinder the widespread adoption of precision forestry, despite increasing demand for automation in the industry. These three factors highlight the need to bridge the gap between research priorities (e.g., the dominance of remote sensing) and operational challenges (e.g., real-time decision-making). The analyses and assessments presented in the following sections elaborate on the elements illustrated in the conceptual framework (Figure 1).
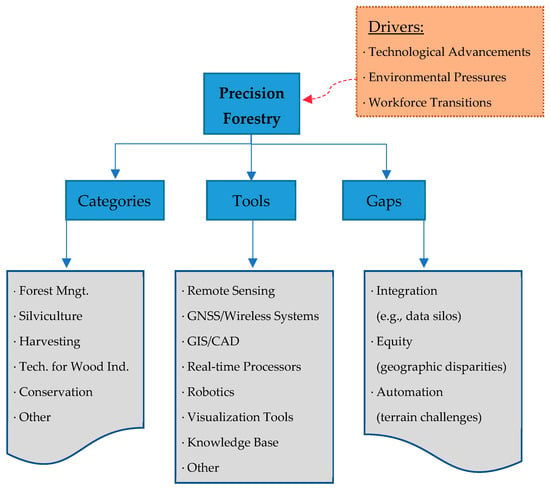
Figure 1.
A conceptual framework illustrating the key drivers, components, and gaps in precision forestry.
1.2. Main Categories of Precision Forestry
Several categorization systems for precision forestry exist in the literature, reflecting the evolution of the field as technology advances and the body of research grows. The number of categories has increased over time. For example, Taylor et al. [] initially defined two broad categories of precision forestry: (i) using geospatial information in forest management and planning, and (ii) supporting site-specific silvicultural operations. Later, Taylor et al. [] expanded their classification by adding a third category: (iii) advanced site-specific technology to meet market demands.
Similarly, the organizers of the first International Precision Forestry Cooperative Symposium [] structured the event into three distinct sessions: (i) remote sensing of forest land and vegetation, (ii) sensing, measuring, and tagging trees, and (iii) decision support systems. The second session garnered the most attention, with nearly half of the oral presentations delivered in this category. Two years later, the organizers held a second symposium [] with a modified session structure: (i) precision operations and equipment, (ii) remote sensing and measurement of forest lands and vegetation, (iii) terrestrial sensing, measurement, and monitoring, and (iv) design tools and decision support systems. This time, the fourth session drew considerable interest, with 9 out of 25 presentations focused on decision support systems.
Based on our experience and a review of the latest literature, we identify the following six categories of precision forestry:
- Forest management and planning: Example applications include collecting site-specific performance indicators on a timber tract (similar to an agricultural yield map) and using this information to develop site-specific management plans [], enhanced forest inventories where LiDAR is used to detect tree and stand attributes, characterizing non-timber ecosystem services, forest cover mapping including automated stand delineation, plant production modeling such as tree growth and yield, harvest scheduling with or without spatial constraints, and assessing the spatial accuracy of GNSSs under varying forest conditions. The purpose of this category is to improve planning efficiency by better describing the variability in the units, for example, in Wing et al. [] that uses LiDAR to support the creation of harvesting units using group selection silvicultural prescriptions. Thus, the goal of precision forestry is reducing the cost of data collection while improving the quality and transparency of the data used in forest planning.
- Silvicultural operations: Example applications include using GNSSs and variable-rate technology to improve the efficiency of herbicide spraying or fertilizer application, employing control systems and field computers to provide real-time guidance to machine operators like minimizing overspray or optimizing thinning intensity, utilizing temperature-recording radio frequency identification (RFID) tags to monitor the conditions under which tree seedlings are lifted, processed, transported, and stored before planting, advanced genetic improvements for gene mapping and marker-based breed selection [], and automated nurseries. The data can be used to improve the quality of the silvicultural options and allowing the optimization of the operations.
- Harvesting operations and transportation: Example applications include using information technology to optimize transportation routes for wood products from the forest to the most appropriate processing location, enabling wireless communication between harvesting machines, transportation dispatching services and manufacturing facilities, spatially optimizing skidding and forwarding processes, employing vehicle management systems for truck scheduling, assessing road surface deformation with UAV imaging or mobile laser scanners, planning forest road network using virtual reality (VR) or other visualization tools, and implementing precise log-making technologies. These technologies can also improve the characterization of logs, supporting increased value recovery during log-making operations. Overall, such advancements can lead to increase efficiency of the supply chain though improved tracking and reconciliation of data used to manage the forestry logistics network.
- Technologies to meet forest industry demand: Example applications include using sensors at the time of harvest to evaluate tree or log quality, determine its best future use, and schedule shipping directly to the most suitable manufacturing plant [], separating high-value products such as veneer logs or high-stiffness lumber to maximize landowner investment returns, assessing wood quality and internal properties using computed tomography or ultrasound, employing RFID and other tagging systems for an integrated wood supply (logistics) chain, and automating sawmills with log scanners and sawing pattern optimizers. This may have significant impact on chain-of-custody operations required by regulations such as the EU Regulation on Deforestation-free Products (EUDR) or by forest certification systems.
- Forest conservation: Example applications include assessing soil compaction caused by harvesting operations, detecting root system damage from heavy machinery, identifying damage to remaining tree stems, mapping habitat quality for key wildlife species, and monitoring ecological integrity. These applications can provide valuable insights into overall forest health.
- Other: This category includes precision forestry applications that do not fit into one of the aforementioned categories. For example, Seifer et al. [] determined optimum value ranges for flight parameter selection in overcanopy data collection using UAVs but did not associate their application with a specific forestry task. As a result, their study does not fall under any of the five categories described above. Other precision forestry applications spanned multiple categories. Kukko et al. [] produced 3D terrain and tree maps to optimize harvester operations and forest inventory at the individual tree level, therefore fitting in categories 1 and 3.
1.3. Tools and Techniques Used for Precision Forestry
Similarly to main categories, it is challenging to group tools and techniques used for precision forestry due, in part, to rapid technological advancements in a relatively short period. Considering the state-of-the-art and an up-to-date literature review, we have identified the following eight components of precision forestry:
- Remote sensing platforms and sensors: These include both active and passive remote sensing systems, such as optical cameras, LiDAR, terrestrial laser scanning (TLS), and radar. This data is collected from spaceborne, airborne, or ground-based platforms. Recently, UAVs and other mobile scanning devices (e.g., backpack LiDAR and smartphones) have gained popularity as close-range remote sensing tools within the forestry community []. In particular, with the development of simultaneous localization and mapping (SLAM) technology, the use of mobile laser scanners has increased significantly in forest inventories []. SLAM-based scanners can collect spatially explicit data in a local coordinate system without relying on GNSS signals, which are often difficult to receive under forest canopies. Similarly, autonomous UAV swarms is another cutting-edge development attracting foresters’ attention, as these cooperative groups of UAVs can execute dangerous tasks such as the detection and mitigation of forest fires [].
- GNSS and wireless systems: GNSS and wireless systems are used in a variety of applications in precision forestry from handheld GPS and UAV imaging to autonomous outdoor navigation and locomotion systems. FieldMap (IFER, Jílové u Prahy, Czech Republic) is one of the in-forest inventory tools comprising a GPS and several wireless systems [].
- GIS and CAD software: Since management and operational decisions are often spatially explicit in forestry, daily use of GIS is common not only for precision forestry but also for many other forestry tasks. CAD packages, on the other hand, are still in use in forest enterprises of certain countries for road design tools and/or ownership databases.
- Real-time process control scanners: These devices differ from typical remote sensing tools, encompassing devices such as RFID tags, soil sensors, computed tomography (CT), and ultrasound decay detectors. While soil sensors are used to remotely collect data for site-specific drainage and fertilization applications [], X-ray CT is used to measure ring width, wood density, and other anatomic features of trees []. RFID tags can be attached to individual trees to store pertinent data such as location, species, diameter at breast height (dbh), and health [].
- Robotic technologies: While significant advancements have been made in robotics, machine learning and artificial perception, applications in forestry remain in their infancy due to challenging forest conditions. These include rugged terrain, extreme weather, the visual homogeneity of treed landscapes, and the impact of vibration–factors that contrast with human-modified landscapes or controlled environments []. According to Oliveira et al. [], robots are currently being used in forestry for inventory operations (32%), environmental preservation and monitoring (27%), forest planting, pruning, and harvesting (22%), and wildfire firefighting (19%). As their functionality increases and labor shortages continue, their use is expected to grow.
- Visualization tools: These tools range from e-dashboards visualizing performance data based on a central electronic data repository to forestry simulators for safe and cost-effective operator training. Other examples include design tools, digital twins, and virtual/augmented reality (VR/AR) solutions []. More recently, virtual laser scanning has emerged as a new approach for visualization in forestry by generating synthetic point clouds (also known as simulated point clouds) from 3D forest scenes using software such as Blender v4.x and HELIOS++. This approach allows researchers to test different sensors and data collection modes under a wide range of forest conditions, without the need for time-consuming and costly field surveys. Research has also shown that deep learning models can be effectively trained using virtual laser scanning data, achieving accuracies comparable to those of models trained on real-world data [].
- Extensive knowledge bases: Decision support and integrated data systems are key components of the information base used in precision forestry. While the system functionality can vary significantly, common examples include scenario analyses that project natural forest development under different management strategies. As such, stand simulators and growth and yield models are cornerstones of decision support systems []. eYield is a recent example of a forest decision support system [] (Source: eYield Webpage, https://eyield.sref.info/ (accessed on 2 September 2025)). It is designed to support small- and medium-sized private landowners in the southeastern U.S. by providing stand-level simulations of harvest activities and financial outcomes. The reports generated by eYield offer both biophysical and financial insights into the outcomes of each forest management scenario. For example, bark beetle risk can be assessed for natural pine forests, while annual cash flow and net present value can be documented for each period of the planning horizon [].
- Other: Studies that utilized more than one component.
1.4. Motivation
As financial and environmental pressures on forest management activities increase, there is a growing expectation that improved data will yield additional insights to meet society’s demands for the multiple goods and services provided by forests. However, deploying new technology in the forestry and wood products industry is often challenging [,,]. It can introduce additional complexity to already intricate job processes. Tasks that once relied on basic field skills–fundamental to most forestry curricula–now require advanced technical expertise in areas, such as digital image processing and data management. These skill barriers may hinder the adoption of newer technology or prevent users from fully benefiting from innovations such as precision forestry tools.
Beyond technological development, these tools must also be implemented by the logging workforce, which has historically shown a low rate of technology adoption [,]. For example, a survey of the U.S. forest industry found that only a small fraction of firms integrates robots into their production systems. Survey responses indicated that expertise in robotic technologies remains very low, potentially limiting the adoption of robotics in production. In addition, the survey revealed that 77% of primary wood products manufacturers were unfamiliar with the terms “Industry 4.0” or “Smart Manufacturing” [].
A similar lack of awareness applies to “precision forestry”, particularly when compared to “precision agriculture”. Our analysis of Google Trends indicates that “precision forestry” is rarely used as a search term, whereas “precision agriculture” has shown an increasing trend since 2010 (Figure 2). Figure 2 further illustrates the considerable difference in the usage frequencies of these terms.
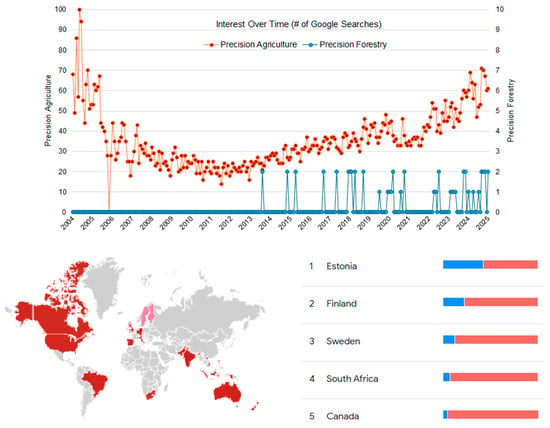
Figure 2.
Google Trends comparison of search interest in “precision forestry” (blue) and “precision agriculture” (red). Percentages by country represent the share of searches for each term relative to the total searches for both terms within that country. The pink color on the map indicates the relative popularity of the term “precision forestry” in the top-ranking countries, red represents top-ranking countries with higher interest in “precision agriculture”, and gray indicates countries where both terms are relatively unpopular. Data were retrieved in January 2025 (Source: Google Trends, https://trends.google.com/trends/ (accessed on 13 September 2025)).
To address the challenge of awareness, precision forestry technologies and their on-the-ground applications should be integrated into undergraduate forestry and wood science curricula. However, introducing new technologies is not an easy task for curriculum developers. For instance, GIS technology became widely available in the 1990s, but it was nearly 20 years before GIS skills were incorporated into forestry curricula. This required the development of software operational on low cost computers that could be supported by educational institutions [,].
On the other hand, there is a pressing need within the forestry community for a comprehensive understanding of precision forestry with its all aspects. This paper aims to provide an up-to-date introduction to the concept of precision forestry and to develop a conceptual framework that outlines its drivers, key categories, and components, while also identifying gaps in this field. This may offer researchers and developers the possibility to review opportunities for developing precision forestry tools and techniques in both the forestry and forest industry sectors.
Although previous reviews exist in the literature, many are either outdated [,] or limited in scope. For example, Ferreira et al. [] reviewed the state of the art in artificial perception and sensing for robots in precision forestry, identifying key challenges such as the lack of training data, real-time operation constraints, and computational resources limitations. While valuable, this work focused solely on robotic technologies—just one of the eight components of precision forestry. Similarly, Hoffmann et al. [] analyzed European studies that employed trafficability maps to minimize soil disturbances during harvesting operations. Their review found that the topographic wetness index (TWI) and depth-to-water algorithm (DTW) were the most commonly used indicators for this purpose, with Sweden leading in this domain. However, this study only addressed the harvesting operations and transportation category of precision forestry, leaving other aspects unexamined. We believe that our work will offer a more recent and inclusive review by covering several key aspects of precision forestry.
2. Methods
A literature search was conducted using Web of Science, recognized as one of the most selective and scientifically rigorous databases for bibliometric analyses []. We based our search solely on Web of Science because its initial results appeared more reliable than those from other search engines, such as Scopus and Google Scholar. For example, all of the publications retrieved in the initial search were contextually relevant to precision forestry, which was not the case with the other search engines.
Initially, we searched for the term “precision forestry” in the title field, which includes journal articles, proceedings papers, books, or book chapters. This search yielded only 24 publications, with no temporal restrictions applied (as of January, 2025). Given the limited results, we expanded the search to include the topic field, which scans titles, abstracts, keywords, and author keywords. This broader search returned 224 publications, including 12 review articles. Once again, no temporal restrictions were applied to ensure coverage of all relevant publications up to 2025. To maintain quality and relevance, 14 publications were excluded as we focused solely on peer-reviewed articles written in English with full-text availability (Figure 3). Consequently, 210 publications were selected for evaluation using a structured review template (see Supplementary Materials). Since we believe that this dataset is sufficient to characterize the research being conducted in the field, no additional search terms were employed. While we acknowledge that some relevant papers may not have been captured by our search criteria, we are confident that the overall trends in precision forestry research can be reliably described based on this extensive sample.
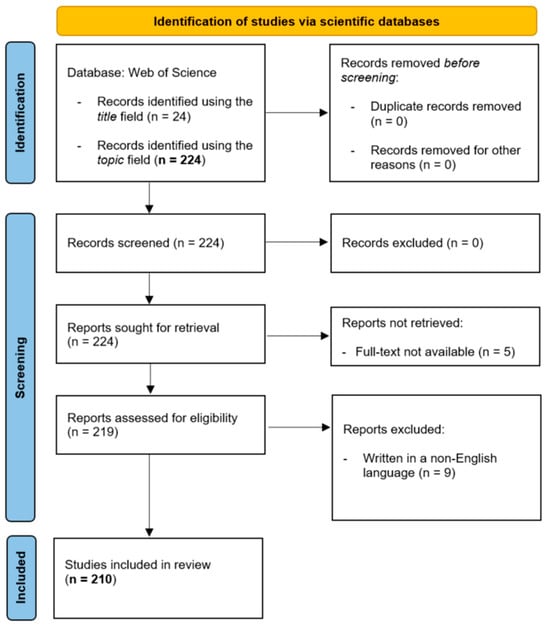
Figure 3.
PRISMA 2020 flow diagram for the systematic review, illustrating the identification, screening, and inclusion of records from the database search. The literature search was conducted in January 2025, and the diagram was generated in September 2025 (Source: https://www.prisma-statement.org/prisma-2020-flow-diagram (accessed on 1 September 2025)).
The review template included key queries such as publication year, type of publication (i.e., original research, review, conference proceedings), study area (country of the first author and research location), study area size (in hectares), primary category of precision forestry (six categories, as described in Section 1.2), specific precision forestry components used (eight components, as described in Section 1.3), number of citations, and reviewer comments (if applicable). To minimize bias between newly published and older studies, the number of citations was averaged yearly rather than using raw citation counts. Google Scholar was used to retrieve citation counts, as it is less selective than Web of Science, allowing for a better reflection of the potential popularity of the studies.
Frequency tables and pie charts were used to analyze key queries from the review template, and temporal trends were examined to assess the evolution of precision forestry research over time. Additionally, the spatial distribution of the reviewed studies was visualized on a world map at the country level using symbology tools in ArcGIS Pro 3.0 []. The Jenks natural breaks classification method was applied to group the data into six classes based on the number of studies conducted in each country.
3. Results
3.1. Descriptive Analysis
This study used a final list of 210 publications that focused on various aspects of precision forestry up to 2025. The first study was published in 2001, and only a few studies were published annually until 2011 (Figure 4). After 2011, the annual number of publications generally increased. A notable rise occurred in 2019, and the increased trend has continued since then. The peak in our sample was recorded in 2024, with 30 studies published that year (Figure 4). We expect that the increase in precision forestry research will continue to grow as sensor and robotic technologies advance.
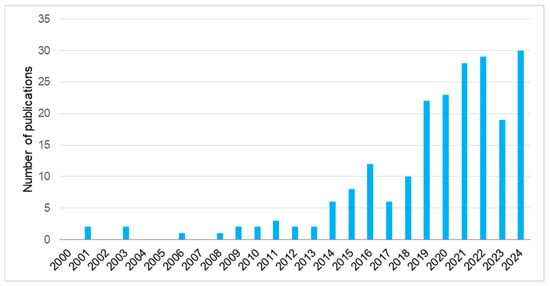
Figure 4.
Annual number of studies published between 2000 and 2025. No studies were found prior to 2001. Although the literature search was conducted in January 2025, a few publications from 2024 may not yet have been indexed in Web of Science (Source: Supplementary Materials).
Out of 210 studies, 125 provided information on the size of their study areas. The sizes ranged from a skid trail as small as 0.04 ha in Slovenia [] to a multinational region covering 53.9 million ha in Northeast Asia []. However, most studies were conducted in relatively limited areas, with a median size of 26.1 ha. This figure is considered small compared to typical study areas in the broader field of forestry.
Italy was the most frequently affiliated country for first authors (Figure 5). China, Finland, and the United States followed Italy, contributing 28 and 19 studies, respectively. These four countries were also ranked highest when considering the locations of the study areas. Approximately 12.4% of all studies were conducted in Italy, while China and Finland accounted for 9.5% and 8.1%. Interestingly, Finland and the United States had the same number of studies for both author affiliation and study area location. Figure 5 also highlights that several studies were conducted outside the country of the first author’s affiliation. For example, seven studies were carried out in New Zealand, although none of the first authors were affiliated with institutions based there. In contrast, nine first authors in the sample were affiliated with Norwegian institutions but only six studies were conducted in Norway. Turkey was the only country in Figure 5 where the number of studies matched both in terms of study area location and the first author’s country of affiliation.
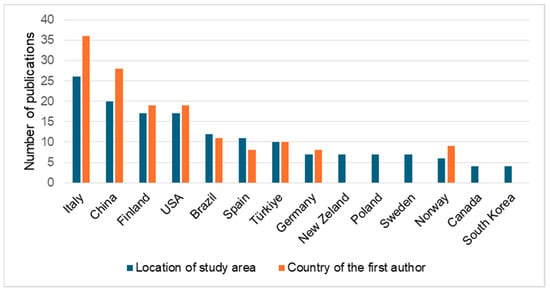
Figure 5.
Total number of studies by study area location and first author’s country of affiliation, as of January 2025 (Source: Supplementary Materials).
The country-wise distribution of the reviewed studies by research location was also visualized on a world map (Figure 6). A total of 31 studies did not specify a research location due to various reasons (e.g., global reviews, editorials, and conceptual papers). Excluding these, nearly half of the reviewed studies were conducted in Europe, followed by Asia (23.9%), North America (14.1%), South America (8.2%), and Oceania (4.9%). Only one study was conducted in Africa, specifically South Africa. The map highlights that precision forestry studies are unevenly distributed across the five continents, with Europe, Asia, and North America hosting the highest number of studies, respectively.
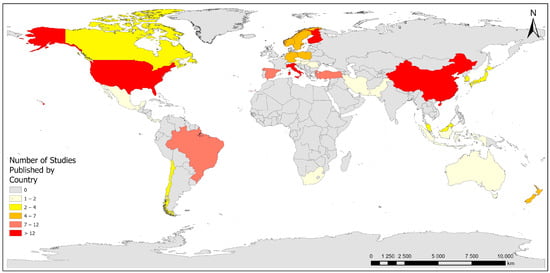
Figure 6.
Geographic distribution of precision forestry research based on study area locations, as of January 2025 (Source: Supplementary Materials, shapefile source: Esri).
3.2. Thematic Analysis
All studies were grouped into six main categories, as previously identified in Section 1.2. The bar graph in Figure 7 shows that the “forest management and planning” category had the highest number of studies in precision forestry research, with nearly half of the publication focusing on this area. It was followed by “harvesting operations and transportation” (19.5%), “other” (12.9%), “silvicultural operations” (8.6%), “forest conservation” (6.6%), and “technologies to meet forest industry demand” (2.9%). The relatively high share for the first category can be attributed to the broad scope of forest management and planning, which spans topics such as terrestrial-based ecosystem inventories, satellite-based forest cover mapping, and computerized optimization systems.
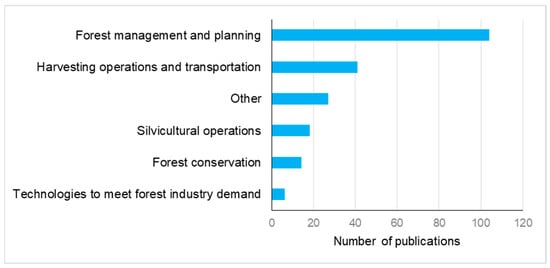
Figure 7.
Total number of studies by main categories of precision forestry research, as of January 2025 (Source: Supplementary Materials).
The number of studies grouped under the “other” category was notable in our thematic analysis (Figure 7). Upon closer examination, it was observed that most of these studies addressed more than one category simultaneously. For example, in a review paper on UAV-based forest remote sensing, Dainelli et al. [] touched all categories except “technologies to meet forest industry demand”. Such studies highlight the interdisciplinary nature and multifaceted goals of precision forestry research. Additionally, a few studies did not fit well into any of the five defined categories. For instance, Win et al. [], modeled and mapped surface soil moisture using multi-source remote sensing data and machine learning techniques in Japanese forests. While this research provides valuable insights into ecological processes and the hydrologic regime of forest ecosystems, it is difficult to assign it to any of the identified precision forestry categories. With the continued advancement of digital technologies, it is likely that the number of studies falling into the “other” category will increase.
We also analyzed our sample based on the components utilized in the reviewed studies. Among the eight components identified in Section 1.3, “remote sensing platforms and sensors” emerged as the most commonly used tool in precision forestry research, with slightly more than half of the studies incorporating it (Table 1). This was followed by “other” (18.6%), “GNSS and wireless systems” (10.0%), “extensive knowledge bases” (7.1%), “GIS and CAD software” (5.7%), “real-time process control scanners” (3.3%), and “robotic technologies” (1.4%). “Visualization tools” were used in only two studies (<1.0%), both of which focused on landscape management models. The relatively high share of the “other” category suggests that a considerable number of studies employed a combination of multiple components.

Table 1.
Distribution of studies across the technological components and main categories of precision forestry (Source: Supplementary Materials).
Analyzing the components of precision forestry by main categories may enhance our understanding of which tools and techniques are prevalent in specific fields. Figure 8 shows the percent shares of each component across the six categories. The categories “forest management and planning”, “forest conservation”, and “technologies to meet forest industry demand” differed from the others, as they primarily relied on remote sensing tools and techniques in their research efforts. In contrast, studies grouped under “harvesting operations and transportation” more frequently utilized GNSSs and wireless systems than other components (Figure 8). This finding is likely due to the need for wireless location services onboard harvesters and trucks, particularly for tracking and potentially for autonomous outdoor operations. Meanwhile, studies in the “silvicultural operations” category often employed extensive knowledge bases alongside remote sensing. The widespread use of knowledge bases to support silviculture-related precision forestry research can be attributed to the critical role of growth and yield models, as well as decision support systems, in projecting tree and stand development under various silvicultural regimes.
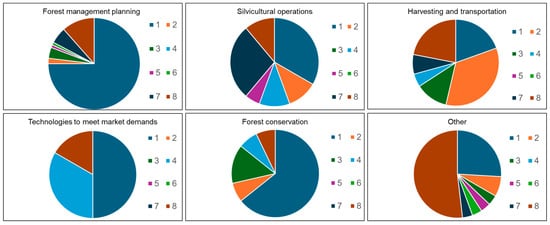
Figure 8.
Pie charts illustrating the distribution of precision forestry components by main categories, as of January 2025. 1: remote sensing platforms and sensors; 2: GNSSs and wireless systems; 3: GIS and CAD software, 4: real-time process control scanners; 5: robotic technologies; 6: visualization tools; 7: extensive knowledge bases; 8: other (studies that utilized more than one component). Source: Supplementary Materials.
It is worth noting that certain components of precision forestry were underutilized or absent in specific categories. For example, none of the 104 studies grouped under “forest management and planning” used real-time process control scanners (Figure 8). Similarly, GIS/CAD software and visualization tools were not employed in any studies related to “silvicultural operations”. Although robotics did not appear to be used exclusively in “harvesting operations and transportation”, it was applied in combination with other components several times within this category.
Most precision forestry research attracted the attention of the scientific community, as 193 out of 210 studies in the sample had at least one citation. Citation counts per year ranged from 0 and 41.4, with a median value of 3.0. As expected, the most academically impactful studies tended to address more than one category of precision forestry. Studies focusing solely on “forest management and planning” also garnered considerable attention compared to other categories. In contrast, “silvicultural operations”, “technologies to meet forest industry demand”, and to a lesser extent, “harvesting operations and transportation” were among the less popular categories. Regarding precision forestry components, studies that utilized remote sensing tools and techniques received significant attention from the scientific community. The most cited papers in our sample were almost always related to certain aspects of remote sensing. We did not observe any consistent patterns indicating the unpopularity of particular components.
4. Discussion
Technology is often found on multiple levels. First there is research, which explores its capability and potential benefits. Often following research is the curriculum, where technology is introduced, and postgraduate education, where a broad range of professionals are trained in the use and application of the technology. This study highlights research developments across the broad spectrum of projects that demonstrate the benefits of precise technologies. Furthermore, these projects demonstrate the wide variety of technologies used in forestry that facilitate the automatic capture of data from multiple sensory platforms.
The technology described in these studies involves data capture using remote sensing, including optical [,], LiDAR [,,], radar [,], and various other parts [] of the electromagnetic spectrum. The literature review describes how the sensors collect new data at scales to support the broad fields of forestry and the wood products industry. The sensors can be mounted on satellites [,], traditional aircraft [,], and now on UAVs [,] and smartphones [,], which increases the accessibility of the data to a broader audience, as the cost of certain satellites and traditional aircraft is high and may not support timely data needs.
Data collection is one of the early stages of precision forestry. The next step is data transfer and data management systems. The creation of advanced wireless technologies allows the data to move from collection to data analysis platforms [,]. These data analysis platforms are primarily CAD or GIS platforms that allow for data manipulation and display [,]. These are occasionally linked to data visualization tools to display the data in formats other than traditional maps [,]. Visualization is often a powerful tool that allows human interaction with the data to support improved decision-making [].
As in all fields, robotics is beginning to appear in precision forestry, gradually replacing human labor in certain tasks [,,]. There is great appeal in much of forestry in replacing dangerous jobs, such as fire suppression, or mundane jobs, such as tree planting, with machines. The adoption of robotics may have huge impacts as the forestry workforce is aging and not being replaced.
The research reviewed in our study demonstrates the broad range of precision forestry technologies that are beginning the process of widespread adoption by the industry. One question that remains unanswered is whether the technological skills often required for this adoption are present in many forestry curricula. The forestry community may need dedicated information and technology specialists to support the adoption of these tools, especially considering its historically low rate of technology adoption [,]. Forestry programs would benefit from recruiting technology specialists to be part of their departments, and/or encouraging students to seek courses and training in technological skills that might be available in related departments, such as geography and engineering.
4.1. The Current Scientific Landscape
An analysis of 210 publications shows how research and applications on precision forestry have grown significantly over a relatively short period of two and a half decades. The increasing trend in the number of publications, particularly after the 2010s, can be attributed to the rapid growth of general UAV research and sensor technologies during that time [,,], as 111 of the reviewed publications utilized the “remote sensing platforms and sensors” component of precision forestry. Indeed, UAV and close-range LiDAR sensors were the most widely used tools in our sample for various tasks, including individual tree detection and mapping [,,,,,,,,], forest structure characterization [,,,,,,,], site assessment before planting [], stem profile modeling [], tree species classification [], aboveground biomass estimation [], and forest health monitoring [,]. As seen from this collection of studies, most are recent, and when their content is analyzed, the trending topics appear to be individual tree detection, crown delineation, canopy height modeling, and stem volume estimation—topics that fall primarily under the category of forest management and planning. Earlier publications in this category did not address such topics, mainly due to the coarse resolution of remotely sensed data. For example, Kellndorfer et al. [] struggled to retrieve plot-level inventory parameters from JPL AirSAR images collected in 1998, even though their study focused on homogeneous pine plantations located on relatively flat terrain. The nominal azimuth resolution of their dataset was 21.6 m, which limited individual-tree-level analysis. Similar data quality constraints also applied to LiDAR point clouds during that period. LiDAR-based forest inventories conducted in the early 2000s typically had data densities of less than 1 point/m2, whereas current point cloud densities often exceed 40 points/m2 []. Thus, it is reasonable to state that the emergence and development of precision forestry are closely tied to improvements in remotely sensed data, with the different stages of technological development shaping the trending topics in precision forestry publications over time.
On a different note, UAVs equipped with true-color, multispectral, hyperspectral or LiDAR sensors are also among the most widely used tools in precision agriculture research, with 150 out of 259 precision agriculture-related publications employing these technologies []. Hernandez et al. [] and Matiza et al. [] associated the popularity of these tools with their clear advantages over other precision technologies, such as high spatial accuracy and the ability to retrieve information on multiple elements (e.g., vertical biophysical structure, land extent, spectral features) at different scales. With the ability to provide high-precision forest structural information, UAV-based LiDAR systems can facilitate bridging spatial gaps between localized or limited field data and spatially incontiguous, large-area spaceborne LiDAR samples. Such an approach enables large-area forest assessments with limited challenges related to cost and coverage due to free and open data policies of current systems (e.g., ICESat-2 and GEDI), and near-global coverage []. We anticipate that the adoption of UAV platforms will continue to grow as the cost of data collection decreases.
As in many other fields, robotics is starting to make its way into precision forestry, assisting with or even taking over certain tasks traditionally performed by humans. For example, Chirici et al. [] introduced a legged robot, named SPOT (Boston Dynamics, Waltham, MA, USA), to support forest inventories. Equipped with optical cameras and a LiDAR sensor, SPOT can navigate through forest stands and autonomously avoid obstacles. It was tasked with stem mapping, individual tree detection, and diameter measurement. While SPOT was able to detect and measure the diameters of large trees (>20 cm) with acceptable accuracy, it struggled to identify smaller trees due to the presence of noise in the LiDAR point cloud. In addition, measuring tree height was nearly impossible, as the point cloud had a vertical limit of only 3 m above ground level. In a review focused on robotics in precision forestry, Ferreira et al. [] noted that forest operations are among the most challenging areas of research in robotics due to the inherent difficulties of forest environments. Robots must contend with rugged terrain, stones, fallen deadwood, and dense undergrowth. Moreover, the visual homogeneity of forest landscapes—where trees often appear similar—limits robots’ navigation capabilities. External factors such as vibration, dust, wind, and rain also present technical challenges. This is why ground-based robotic applications in forest environments lag behind other sectors like automotive, agriculture, and construction. However, robotics and artificial perception technologies are rapidly advancing, and there is significant interest in the forestry sector that aims to automate hazardous and/or time-consuming tasks including tree planting, timber harvesting, stand delineation, and prescribed burning.
The geographical distribution of precision forestry research suggests that Italy, China, and Finland are the countries with the highest number of published studies (Figure 5). Several factors may explain this pattern. Finland has a long-standing tradition in forestry research, supported by strong academic institutions and a national dependence on the forest sector, which fosters the development of advanced technologies for sustainable management. China, with its vast and diverse forest resources, has prioritized precision forestry to support large-scale reforestation, ecological restoration, and sustainable timber production, reinforced by significant government investment in smart forestry initiatives. Italy’s prominence is linked to its active participation in EU-funded research programs, strong academic expertise in geospatial and environmental sciences, and the need to address Mediterranean-specific challenges such as monitoring wildfire risk and forest fragmentation. Collectively, these factors help explain why these countries have become central contributors to the advancement of precision forestry research.
At the same time, the findings on the geographical distribution of precision forestry research may appear somewhat surprising, as they contrast with the country-specific results from Google Trends (Figure 2). This discrepancy likely stems from the different methodologies used by Web of Science and Google Trends. While Web of Science indexes published scientific papers, Google Trends measures the popularity of online search queries. Thus, certain countries may demonstrate strong interest in precision forestry technologies without a corresponding depth of published research, possibly due to pressing industrial needs. A fuller understanding of why precision forestry research is concentrated in specific countries would require further investigation into research funding mechanisms, technology accessibility, and national forest management traditions. For instance, the Natural Sciences and Engineering Research Council of Canada (NSERC) provides researchers with greater flexibility in choosing topics than the National Science Foundation (NSF) in the U.S. Similarly, while Horizon Europe’s expected contribution per forestry-related research project is approximately €6 million in 2025, the Scientific and Technological Research Council of Türkiye (TUBITAK) currently provides approximately €50,000 for a typical project under its Scientific and Technological Research Projects Funding (1001) program.
4.2. Selected Use Cases
UAVs and LiDAR systems emerged as the most commonly employed technologies in our review template (see Supplementary Materials). Accordingly, the following paragraphs present two use cases from selected publications, focusing on LiDAR-based forest inventories [] and automated harvest planning []. These cases demonstrate how emerging LiDAR technologies, when combined with innovative algorithmic and GIS-based approaches, can substantially improve key aspects of forest management, ranging from individual tree-level inventory assessments to stand-scale operational planning.
Terrestrial-based laser scanning is widely recognized as the most accurate data collection method for LiDAR-based forest inventories—sometimes referred to as enhanced forest inventories (EFI) []. However, its performance may be hindered by several factors during under-canopy scanning. In particular, tree tops are often underrepresented in dense forest point clouds due to occlusion or the limited scanning range (e.g., 20 m in certain handheld mobile laser scanners), resulting in inaccurate total tree height estimates. Airborne laser scanning (ALS), on the other hand, can overcome this issue by capturing the first laser returns from the top of the canopy. However, this capability comes at the expense of reduced accuracy in characterizing near-ground attributes, such as tree dbh. To address these limitations, the first use case by Lee et al. [] investigated a hybrid LiDAR strategy aimed at enhancing forest inventory assessments by combining terrestrial-based mobile scanning with ALS systems. Their goal was to improve the estimation of dbh and tree height in high-density forest stands.
The study was conducted in a Pinus koraiensis plantation in South Korea. A Matrice M300 UAV (DJI, Shenzhen, China) equipped with a GeoSLAM Horizon LiDAR sensor (GeoSLAM Ltd., Ruddington, UK) was used to collect ALS data, and the same sensor was used in backpack mode for mobile laser scanning (Figure 9). The two point cloud datasets were merged using the Iterative Closest Point algorithm by aligning them along a forest road feature. A key methodological innovation involved testing three circular fitting algorithms (i.e., circle fitting, minimum enclosing circle, and ellipse fitting) to achieve optimal dbh estimates based on segmented individual tree point clouds at breast height. Tree heights were derived from a canopy height model (CHM).
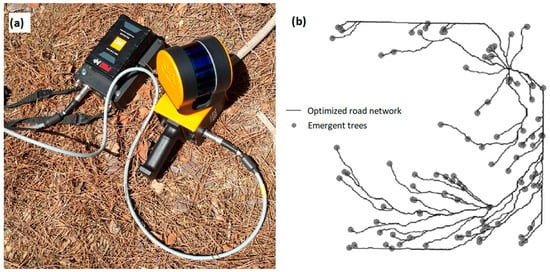
Figure 9.
(a) The mobile laser scanning system used for forest reconstruction in the first use case [] (Photo: Can Vatandaslar), and (b) the final map showing the optimal logging path for harvest planning in the second use case (modified from Görgens et al. []).
The findings indicated that the ellipse fitting algorithm yielded the most accurate dbh estimates (RMSE: 0.69 cm, R2: 0.99). Tree height estimation was less precise (RMSE: 2.0 m, R2: 0.60), primarily due to the presence of suppressed trees affected by overlapping crowns of dominant neighbors—a common issue in structurally complex forests also reported by Vatandaslar et al. [].
The hybrid LiDAR strategy proved effective in addressing ALS’s limitations in under-canopy environments and significantly improved dbh estimation accuracy. However, UAV-based ALS data collecting using the GeoSLAM Horizon sensor showed limited effectiveness in capturing precise tree height information. Mounting more tailored LiDAR sensors on UAVs (e.g., Zenmuse L2 (DJI, Shenzhen, China) or Qube 240 (Quantum-Systems GmbH, Gilching/Munich, Germany)) or utilizing traditional ALS data acquired through airborne missions may yield more accurate canopy height information, given the relatively limited performance of mobile systems like the GeoSLAM Horizon when deployed on UAV platforms. Another reason for the imprecise height estimation may stem from the quality of the reference data, as tree height measurements in this study were conducted using a hypsometer. Direct measurements from felled trees are generally more reliable than indirect measurements taken from standing trees; however, this approach is often considered destructive and may not be a feasible option in many cases.
In the second use case, Görgens et al. [] proposed a spatially explicit multi-criteria optimization approach to develop automated harvesting plans by integrating ALS data with GIS methods. The main objective was to explore how automated tools could support low-impact and cost-effective timber harvesting operations while ensuring compliance with forest management regulations in Brazil. Three planning scenarios were simulated to reflect varying management intensities, regulatory criteria, and economic goals: (i) business-as-usual scenario (slope surface cost + law restriction), (ii) forest conservation scenario (law restriction + canopy height + relative density model-related costs), (iii) soil conservation scenario (law restriction + topographic wetness index-related costs), and (iv) all scenarios combined (all cost surfaces). The automated system evaluated each scenario in terms of aboveground biomass, number of extracted trees, economic return, and the spatial configuration of skid trails. A CHM was used both to estimate harvestable biomass (as a proxy) and to detect individual trees, while topographic models informed skidding and transportation feasibility. For example, two operational raster surfaces representing technical machine limitations were generated based on slope thresholds derived from the digital terrain model. According to national regulations, slope limits for skidder and loaded truck operations were set at 20° and 9°, respectively.
In another step, the individual surfaces were combined to generate a total cost surface. This cost did not represent a monetary value but rather the relative resistance of each cell to movement. For example, the cost surface based on the slope model associated the high cost to the greater slopes. The optimization process then identified least-cost paths from the start cell (logging yard) to each endpoint (tree location) by calculating the accumulated resistance across the surface. This was achieved using a node-link raster representation, in which nodes corresponded to cell centers and links connected adjacent cells. The cost distance was defined as the resistance encountered along these links. Ultimately, GIS tools were used to compute the least accumulative cost paths between the logging yard and the target trees. The final maps were road networks with the least cost path for each scenario.
This study showed that adding more criteria to the optimization model resulted in increased logging paths (and cost) and the cost surface maps varied significantly among the planning scenarios. ALS-derived metrics improved the accuracy of aboveground biomass estimates and enabled the generation of detailed, spatially explicit logging plans. Moreover, the automated approach reduced planning time and ensured consistent adherence to national regulatory criteria. As such, this use case highlights the potential of combining ALS data, geospatial technologies, and algorithm-driven decision support tools to create transparent, repeatable, and economically or ecologically optimized harvesting plans—marking a step forward in the automation of precision forestry operations.
4.3. Limitations of the Review
Despite significant findings regarding global research on precision forestry, this study also has several limitations in its methods and the assessment of publications. Only one search term (i.e., “precision forestry”) was used in the literature search, potentially resulting in the exclusion of certain relevant publications, as the search using the topic field, titles, abstracts, and keywords may not be complete, especially if we consider that the field of precision forestry affects a number of other related applications and this concept may not always be completely identifiable in scientific databases. A range of works also exists in the so-called “white” or “grey” literature, including materials produced within academia, government or non-government organizations, departmental research centers, and companies. These may take the form of student theses, workshops proceedings, or technical reports. Even some authors of the present study had previously published research papers that can be considered within the scope of our review. Either the term “precision forestry” was absent from the paper [,] or it was present only in the main text, not in the title, abstract, and/or keywords []. On the other hand, there is indeed considerable overlap in the literature among forest remote sensing, smart forestry, digital forestry and precision forestry. We regard precision forestry, smart forestry, and digital forestry as distinct concepts, despite areas of intersection. The key differences lie in their focal objectives and technological foundations. For example, smart forestry emphasizes adaptive management and intelligent decision support, with frequent application of the Internet of Things (IoT), blockchain, and big data platforms. Digital forestry, by contrast, is more closely associated with digital twins and virtual models that mirror real-world forest dynamics, typically employing cloud platforms, digital twins, and integrated databases. In practice, however, it can be difficult—and often subjective—to determine the extent to which a given study also falls within the scope of precision forestry. Moreover, not all studies in forest remote sensing, smart forestry, or digital forestry should be classified under precision forestry research merely because they employ similar tools or sensors with high precision. For these reasons, we deliberately restricted our literature search to the term “precision forestry”.
The use of one search engine during the literature search may be considered another limitation of the present study. Although Web of Science is a major academic research platform, many other search engines are available to users, such as Scopus, Google Scholar, and ScienceDirect. Including these databases might have yielded slightly different results due to their varying temporal coverages and inclusion criteria. We based our literature search solely on Web of Science, as it provides a large, multidisciplinary database and is considered more selective and quality-controlled than general search engines []. In our case, all of the retrieved publications (n = 224) during the initial search were contextually relevant. The reason for filtering out 14 publications (resulting in 210 items in Supplementary Materials) was related to the non-English language of the manuscript and lack of access to full texts. While we believe that more than two hundred publications from a recognized scientific database provide a solid foundation for analyses and the formulation of some conclusions, it is important to note that our results are valid only for the input data sample (n = 224).
Finally, we calculated the number of citations for each reviewed publication and averaged them yearly based on the years since online publication. This information was then used as an indicator of the popularity of the given main categories and components of precision forestry. While using citation counts per year seems more objective than using raw citation counts, it may still be biased toward favoring earlier publications. For example, some reviewed studies, such as Roiha et al. [] and Romano et al. [], had yet to be cited as of the end of 2024, even though they were published in prestigious scientific journals in the field of forestry. It is expected that recently published studies will receive considerable attention from the scientific community over the coming years.
4.4. Identified Gaps, Future Directions, and New Research Questions
The main objectives of this study were to (i) compile a publication database that can serve as a resource for future scientific research, (ii) examine temporal and geographical trends in precision forestry applications, and (iii) identify gaps within precision forestry research where further investigation or development is needed. The literature review supported the achievement of these objectives and contributed to a better understanding of the breadth and trends in global precision forestry research.
Based on the analyses and assessments conducted, precision forestry research has mostly addressed operational forest management needs so far, with an emphasis on forest ecosystem inventory. The predominance of remote sensing (52% of studies) reflects its cost-effectiveness and scalability, but also reveals a reliance on passive data collection rather than actionable interventions (e.g., robotics, real-time control). For instance, while UAVs excel at canopy mapping [], only 1.4% of studies addressed robotic applications—a critical gap given labor shortages in hazardous tasks like firefighting []. Similarly, GNSS adoption in harvester systems (19.5% of studies) aligns with industry needs for route optimization, yet its limited use in silviculture (8.6%) suggests untapped potential for precision planting and successful seedling recruitment.
This study also indicates that precision forestry is mature in data collection and mapping (e.g., small UAVs, personal laser scanners, open-source GIS tools) but stagnates in three key areas: integration, equity, and automation (see the conceptual framework in Figure 1). Few studies (3.3%) combine real-time sensors (e.g., RFID) with decision support systems, despite their potential to close the loop between data collection and actionable decision-making []. Geographic disparities (i.e., 48% of studies were conducted in Europe) also risk exacerbating global inequalities in forest resilience [].
UAVs and LiDAR systems appear to be the backbone of current research, compared to other components of precision forestry. While integration of robotic systems has gained some attention in recent years, significant challenges remain—mainly due to terrain complexity []—highlighting a need for expanded research in this component. The use of coordinated robotic systems (e.g., swarm robotics) could revolutionize forestry operations, particularly if the “one-robot-does-all-tasks” approach is reconsidered. Future studies should also explore underexamined topics such as automated under-canopy UAV flights, potentially using in-house developed platforms and more detailed CHM from a ground-level perspective. In parallel, researchers could apply established methodologies to less-studied environments, such as structurally complex, multi-species tropical forests or high conservation value forests globally. To date, most precision forestry research has been conducted in plantations and intensively managed forest systems—likely not only due to the economic benefits of improved wood product quality but also due to relative ease of implementation in human-modified landscapes.
Based on the gaps identified above, the following research questions are proposed to guide future investigations:
- In what ways can coordinated robotic systems, such as swarm robotics, be employed to optimize forestry operations, and what technical and analytical requirements are necessary for their effective adoption across different forest types (e.g., plantations, tropical forests)?
- What are the technical and operational requirements for extending UAV capabilities from canopy mapping to LiDAR-based forest inventory applications in operational forest management? In particular, how can autonomous below-canopy flight planning be achieved?
- How can real-time sensors, such as RFID, be integrated with decision support systems to generate actionable information and enable fully automated forestry operations?
- How can GNSS technology be leveraged to optimize precision silviculture, including improved seedling recruitment, and automated planting and harvesting? In particular, how do inherent GNSS positional errors affect on-the-ground applications in different forest environments?
Beyond technological development, workforce dynamics present an additional challenge. The global forestry workforce is aging and is not being replaced at a sustainable rate. Addressing this issue requires both interoperable systems (e.g., UAV-to-harvester data pipelines) and workforce training tailored to new digital and robotic tools. To support the adoption of new technologies, the forestry community may benefit from integrating information and technology specialists into forest operations. A more forward-looking approach involves embedding precision forestry tools and their practical applications into undergraduate forestry and wood science curricula. This integration would equip future professionals with the necessary skill sets to fully leverage precision forestry technologies.
5. Conclusions
Precision forestry has emerged as a growing field driven through advances in remote sensing, geospatial technologies, and automation. Our review of 210 studies shows that research has centered on forest management and planning, with UAV- and LiDAR-based remote sensing dominating applications, while robotics, visualization tools, and real-time control systems remain underutilized. Geographic and educational gaps continue to limit adoption, underscoring the need for broader regional coverage, stronger industry–academia collaboration, and updated curricula that equip future foresters with digital and analytical skills. Addressing these challenges will be key to realizing the full potential of precision forestry for sustainable and adaptive forest management.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/rs17203465/s1. The review template and a full list of the reviewed studies.
Author Contributions
Conceptualization, C.V. and K.B.; methodology, C.V., K.B., Z.U., L.L.N., A.E.A. and M.M.; validation, C.V.; formal analysis, C.V. and Z.U.; data curation, C.V.; writing—original draft preparation, C.V. and K.B.; writing—review and editing, C.V., K.B., Z.U., L.L.N., A.E.A. and M.M.; visualization, C.V. and Z.U. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
The detailed comments and suggestions from the reviewers’ are appreciated, as they have helped improve the quality of the paper.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Becker, G. Precision Forestry in Central Europe—New Perspectives for a Classical Management Concept. In Proceedings of the First International Precision Forestry Cooperative Symposium, Washington, DC, USA, 17–20 June 2001. [Google Scholar]
- Dyck, B. Precision Forestry—The Path to Increased Profitability. In Proceedings of the Second International Precision Forestry Symposium, Washington, DC, USA, 15–17 June 2003. [Google Scholar]
- Dash, J.; Pont, D.; Brownlie, R.; Dunningham, A.; Watt, M.; Pearse, G. Remote sensing for precision forestry. N. Z. J. For. 2016, 60, 15–24. [Google Scholar]
- Taylor, S.E.; McDonald, T.P.; Fulton, J.P.; Shaw, J.N.; Corley, F.W.; Brodbeck, C.J. Precision Forestry in the Southeast U.S. In Proceedings of the International Precision Forestry Symposium, Stellenbosch, South Africa, 5–10 March 2006. [Google Scholar]
- Kovacsova, P.; Antalova, M. Precision forestry—Definition and technologies. Šumar. List 2010, 11–12, 603–611. [Google Scholar]
- Bare, B.B. Opening Remarks and Welcome to the First International Precision Forestry Symposium. In Proceedings of the First International Precision Forestry Cooperative Symposium, Washington, DC, USA, 17–20 June 2001. [Google Scholar]
- Ferreira, J.F.; Portugal, D.; Andrada, M.E.; Machado, P.; Rocha, R.P.; Peixoto, P. Sensing and artificial perception for robots in precision forestry: A survey. Robotics 2023, 12, 139. [Google Scholar] [CrossRef]
- Choudhry, H.; O’Kelly, G. Precision Forestry: A Revolution in the Woods. 2018. Available online: https://www.mckinsey.com/industries/paper-and-forest-products/our-insights/precision-forestry-a-revolution-in-the-woods (accessed on 31 December 2024).
- Fardusi, M.J.; Chianucci, F.; Barbati, A. Concept to practice of geospatial-information tools to assist forest management and planning under precision forestry framework: A review. Ann. Silvic. Res. 2017, 41, 3–14. [Google Scholar] [CrossRef]
- Schmoldt, D.L.; Thomson, A.J. Precision Technologies: Data Availability, Past and Future. In Proceedings of the Second International Precision Forestry Symposium, Washington, DC, USA, 15–17 June 2003. [Google Scholar]
- Taylor, S.E.; Veal, M.W.; Grift, T.E.; McDonald, T.P.; Corley, F.W. Precision Forestry: Operational Tactics for Today and Tomorrow. In Proceedings of the International Meeting of the Council on Forest Engineering, Schaegl, Austria, 5–9 October 2002. [Google Scholar]
- IPFCS. In Proceedings of the First International Precision Forestry Cooperative Symposium, Washington, DC, USA, 17–20 June 2001.
- IPFCS. In Proceedings of the Second International Precision Forestry Symposium, Washington, DC, USA, 15–17 June 2003.
- Wing, B.M.; Boston, K.; Ritchie, M.W. A technique for implementing group selection treatments with multiple objectives using an airborne lidar-derived stem map in a heuristic environment. For. Sci. 2019, 65, 211–222. [Google Scholar] [CrossRef]
- Murphy, G. Early Experiences with Aroma Tagging and Electronic Nose Technology for Log and Forest Product Tracking. In Proceedings of the Second International Precision Forestry Symposium, Washington, DC, USA, 15–17 June 2003. [Google Scholar]
- Seifert, E.; Seifert, S.; Vogt, H.; Drew, D.; van Aardt, J.; Kunneke, A.; Seifert, T. Influence of drone altitude, image overlap, and optical sensor resolution on multi-view reconstruction of forest images. Remote Sens. 2019, 11, 1252. [Google Scholar] [CrossRef]
- Kukko, A.; Kaijaluoto, R.; Kaartinen, H.; Lehtola, V.V.; Jaakkola, A.; Hyyppä, J. Graph SLAM correction for single scanner MLS forest data under boreal forest canopy. ISPRS J. Photogramm. Remote Sens. 2017, 132, 199–209. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; White, J.C.; Wulder, M.A.; Næsset, E. Remote sensing in forestry: Current challenges, considerations and directions. Forestry 2024, 97, 11–37. [Google Scholar] [CrossRef]
- Wu, Y.; Zhong, S.; Ma, Y.; Zhang, Y.; Liu, M. Application of SLAM-based mobile laser scanning in forest inventory: Methods, progress, challenges, and perspectives. Forests 2025, 16, 920. [Google Scholar] [CrossRef]
- John, J.; Harikumar, K.; Senthilnath, J.; Sundaram, S. An efficient approach with dynamic multiswarm of UAVs for forest firefighting. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 2860–2871. [Google Scholar] [CrossRef]
- De Mil, T.; Van den Bulcke, J. Tree core analysis with X-ray computed tomography. J. Vis. Exp. 2023, 22, e65208. [Google Scholar] [CrossRef] [PubMed]
- Oliveira, L.F.P.; Moreira, A.P.; Silva, M.F. Advances in forest robotics: A state-of-the-art survey. Robotics 2021, 10, 53. [Google Scholar] [CrossRef]
- Petrasova, A.; Harmon, B.; Petras, V.; Mitasova, H. Tangible Modeling with Open Source GIS, 2nd ed.; Springer: New York, NY, USA, 2018; p. 202. [Google Scholar]
- Esmorís, A.M.; Weiser, H.; Winiwarter, L.; Cabaleiro, J.C.; Höfle, B. Deep learning with simulated laser scanning data for 3D point cloud classification. ISPRS J. Photogramm. Remote Sens. 2024, 215, 192–213. [Google Scholar] [CrossRef]
- Nordström, E.M.; Nieuwenhuis, M.; Başkent, E.Z.; Biber, P.; Black, K.; Borges, J.G.; Bugalho, M.N.; Corradini, G.; Corrigan, E.; Eriksson, L.O.; et al. Forest decision support systems for the analysis of ecosystem services provisioning at the landscape scale under global climate and market change scenarios. Eur. J. Forest Res. 2019, 138, 561–581. [Google Scholar] [CrossRef]
- Bettinger, P.; Lee, T.; Merry, K.; Drummond, D. A forest management evaluation system for small private forest landowners. J. Ext. 2024, 62, 19. [Google Scholar] [CrossRef]
- Legg, B.; Dorfner, B.; Leavengood, S.; Hansen, E. Industry 4.0 implementation in US primary wood products industry. Wood Ind. 2021, 72, 143–153. [Google Scholar] [CrossRef]
- Weiss, G.; Hansen, E.; Ludvig, A.; Nybakk, E.; Toppinen, A. Innovation governance in the forest sector: Reviewing concepts, trends, and gaps. For. Policy Econ. 2021, 130, 102506. [Google Scholar] [CrossRef]
- Merry, K.; Bettinger, P.; Clutter, M.; Hepinstall, J.; Nibbelink, N.P. An assessment of geographic information system skills used by field-level natural resource managers. J. For. 2007, 105, 364–370. [Google Scholar] [CrossRef]
- Merry, K.; Bettinger, P.; Crosby, M.; Boston, K. Geographic Information System Skills for Foresters and Natural Resource Managers; Elsevier: Amsterdam, The Netherlands, 2022; p. 414. [Google Scholar]
- Talbot, B.; Pierzchała, M.; Astrup, R. Applications of remote and proximal sensing for improved precision in forest operations. Croat. J. For. Eng. 2017, 38, 327–336. [Google Scholar]
- Hoffmann, S.; Schönauer, M.; Heppelmann, J.; Asikainen, A.; Cacot, E.; Eberhard, B.; Hasenauer, H.; Ivanovs, J.; Jaeger, D.; Lazdins, A.; et al. Trafficability prediction using depth-to-water maps: The status of application in northern and central European forestry. Curr. For. Rep. 2022, 8, 55–71. [Google Scholar] [CrossRef]
- Singh, V.K.; Singh, P.; Karmakar, M.; Leta, J.; Mayr, P. The journal coverage of Web of Science, Scopus and Dimensions: A comparative analysis. Scientometrics 2021, 126, 5113–5142. [Google Scholar] [CrossRef]
- ESRI. ArcGIS Pro 3.0; Environmental Systems Research Institute Inc.: Redlands, CA, USA, 2022. [Google Scholar]
- Koren, M.; Slančík, M.; Suchomel, J.; Dubina, J. Use of terrestrial laser scanning to evaluate the spatial distribution of soil disturbance by skidding operations. iForest 2015, 8, 386–393. [Google Scholar] [CrossRef]
- Luo, W.; Kim, H.S.; Zhao, X.; Ryu, D.; Jung, I.; Cho, H.; Harris, N.; Ghosh, S.; Zhang, C.; Liang, J. New forest biomass carbon stock estimates in northeast Asia based on multisource data. Glob. Change Biol. 2020, 26, 7045–7066. [Google Scholar] [CrossRef]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent advances in unmanned aerial vehicle forest remote sensing—A systematic review. Part I: A general framework. Forests 2021, 12, 327. [Google Scholar] [CrossRef]
- Win, K.; Sato, T.; Tsuyuki, S. Application of multi-source remote sensing data and machine learning for surface soil moisture mapping in temperate forests of central Japan. Information 2024, 15, 485. [Google Scholar] [CrossRef]
- Hassaan, O.; Nasir, A.K.; Roth, H.; Khan, M.F. Precision forestry: Trees counting in urban areas using visible imagery based on an unmanned aerial vehicle. IFAC Pap. Online 2016, 49, 16–21. [Google Scholar] [CrossRef]
- Putra, B.T.W.; Ramadhani, N.J.; Soedibyo, D.W.; Marhaenanto, B.; Indarto, I.; Yualianto, Y. The use of computer vision to estimate tree diameter and circumference in homogeneous and production forests using a non-contact method. Forest Sci. Technol. 2021, 17, 32–38. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Slavík, M. Assessment of stem volume on plots using terrestrial laser scanner: A precision forestry application. Sensors 2021, 21, 301. [Google Scholar] [CrossRef]
- Pascual, A.; Tóth, S.F. Using mixed integer programming and airborne laser scanning to generate forest management units. J. For. Res. 2022, 33, 217–226. [Google Scholar] [CrossRef]
- Vatandaslar, C.; Lee, T.; Bettinger, P.; Ucar, Z.; Stober, J.; Peduzzi, A. Mapping percent canopy cover using individual tree- and area-based procedures that are based on airborne LiDAR data: Case study from an oak-hickory-pine forest in the USA. Ecol. Indic. 2024, 167, 112710. [Google Scholar] [CrossRef]
- Kellndorfer, J.M.; Dobson, M.C.; Vona, J.D.; Clutter, M. Toward precision forestry: Plot-level parameter retrieval for slash pine plantations with JPL AIRSAR. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1571–1582. [Google Scholar] [CrossRef]
- Chen, Y.; Feng, Z.; Li, F.; Zhou, H.; Hakala, T.; Karjalainen, M.; Hyyppä, J. Lidar-aided analysis of boreal forest backscatter at Ku band. Int. J. Appl. Earth Obs. Geoinf. 2020, 91, 102133. [Google Scholar] [CrossRef]
- Tsioras, P.A.; Karaszewski, Z. RFID implementations in the wood supply chains: State of the art and the way to the future. Drewno 2022, 65, 072022. [Google Scholar] [CrossRef]
- Narin, O.G.; Abdikan, S.; Gullu, M.; Lindenbergh, R.; Sanli, F.B.; Yilmaz, I. Improving global digital elevation models using space-borne GEDI and ICESat-2 LiDAR altimetry data. Int. J. Digit. Earth 2024, 17, 2316113. [Google Scholar] [CrossRef]
- Romano, E.; Brambilla, M.; Chianucci, F.; Tattoni, C.; Puletti, N.; Chirici, G.; Travaglini, D.; Giannetti, F. Estimating canopy and stand structure in hybrid poplar plantations from multispectral UAV imagery. Ann. For. Res. 2024, 67, 143–154. [Google Scholar] [CrossRef]
- Gülci, S.; Yurtseven, H.; Akay, A.O.; Akgul, M. Measuring tree diameter using a LiDAR-equipped smartphone: A comparison of smartphone- and caliper-based DBH. Environ. Monit. Assess. 2023, 195, 678. [Google Scholar] [CrossRef]
- Keefe, R.F.; Wempe, A.M.; Becker, R.M.; Zimbelman, E.G.; Nagler, E.S.; Gilbert, S.L.; Caudill, C.C. Positioning methods and the use of location and activity data in forests. Forests 2019, 10, 458. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Li, W.; Han, D.; He, Y.; Li, Q.; Bai, X.; Xu, D. Wireless wave attenuation in forests: An overview of models. Forests 2024, 15, 1587. [Google Scholar] [CrossRef]
- Picchio, R.; Pignatti, G.; Marchi, E.; Latterini, F.; Benanchi, M.; Foderi, C.; Venanzi, R.; Verani, S. The application of two approaches using GIS technology implementation in forest road network planning in an Italian mountain setting. Forests 2018, 9, 277. [Google Scholar] [CrossRef]
- Bugday, E.; Ozel, H.B. Modeling of landslide sensitive areas using GIS in semi-arid forests and evaluation in terms of forest rehabilitation. Rev. Chapingo Ser. Cienc. For. Ambiente 2020, 26, 241–255. [Google Scholar] [CrossRef]
- Akay, A.E.; Sessions, J. Applying the decision support system, TRACER, to forest road design. West. J. Appl. For. 2005, 20, 184–191. [Google Scholar] [CrossRef]
- Cattaneo, N.; Astrup, R.; Antón-Fernández, C. PixSim: Enhancing high-resolution large-scale forest simulations. Softw. Impacts 2024, 21, 100695. [Google Scholar] [CrossRef]
- Chirici, G.; Giannetti, F.; D’Amico, G.; Vangi, E.; Francini, S.; Borghi, C.; Corona, P.; Travaglini, D. Robotics in forest inventories: SPOT’s first steps. Forests 2023, 14, 2170. [Google Scholar] [CrossRef]
- Tylek, P.; Kiełbasa, P.; Szulc, T.; Szychta, M.; Szczepaniak, J.; Wojciechowski, J.; Danielak, M.; Adamczyk, F.; Tadeusiewicz, R.; Juliszewski, T.; et al. Design of a planting module for an automatic device for forest regeneration. Croat. J. For. Eng. 2023, 44, 203–215. [Google Scholar] [CrossRef]
- Chabot, D. Trends in drone research and applications as the Journal of Unmanned Vehicle Systems turns five. J. Unmanned Veh. Syst. 2018, 6, vi–xv. [Google Scholar] [CrossRef]
- Matiza, C.; Mutanga, O.; Peerbhay, K.; Odindi, J.; Lottering, R. A systematic review of remote sensing and machine learning approaches for accurate carbon storage estimation in natural forests. South. For. 2023, 85, 123–141. [Google Scholar] [CrossRef]
- Pierzchala, M.; Giguere, P.; Astrup, R. Mapping forests using an unmanned ground vehicle with 3D LiDAR and graph-SLAM. Comput. Electron. Agric. 2018, 145, 217–225. [Google Scholar] [CrossRef]
- Gallardo-Salazar, J.L.; Pompa-García, M. Detecting individual tree attributes and multispectral indices using unmanned aerial vehicles: Applications in a pine clonal orchard. Remote Sens. 2020, 12, 4144. [Google Scholar] [CrossRef]
- Gu, J.; Grybas, H.; Congalton, R.G. Individual tree crown delineation from UAS imagery based on region growing and growth space considerations. Remote Sens. 2020, 12, 2363. [Google Scholar] [CrossRef]
- Gu, J.; Congalton, R.G. Individual tree crown delineation from UAS imagery based on region growing by over-segments with a competitive mechanism. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4402411. [Google Scholar] [CrossRef]
- Picos, J.; Bastos, G.; Míguez, D.; Alonso, L.; Armesto, J. Individual tree detection in a Eucalyptus plantation using unmanned aerial vehicle (UAV)-LiDAR. Remote Sens. 2020, 12, 885. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Zhang, L.; Fan, X.; Ye, Q.; Fu, L. Individual tree segmentation and tree-counting using supervised clustering. Comput. Electron. Agric. 2023, 205, 107629. [Google Scholar] [CrossRef]
- Deng, S.; Xu, Q.; Yue, Y.; Jing, S.; Wang, Y. Individual tree detection and segmentation from unmanned aerial vehicle-LiDAR data based on a trunk point distribution indicator. Comput. Electron. Agric. 2024, 218, 108717. [Google Scholar] [CrossRef]
- Tupinambá-Simões, F.; Pascual, A.; Guerra-Hernández, J.; Ordóñez, C.; de Conto, T.; Bravo, F. Accuracy of tree mapping based on hand-held laser scanning comparing leaf-on and leaf-off conditions in mixed forests. J. For. Res. 2024, 35, 93. [Google Scholar] [CrossRef]
- Forsman, M.; Holmgren, J.; Olofsson, K. Tree stem diameter estimation from mobile laser scanning using line-wise intensity-based clustering. Forests 2016, 7, 206. [Google Scholar] [CrossRef]
- Giannetti, F.; Puletti, N.; Quatrini, V.; Travaglini, D.; Bottalico, F.; Corona, P.; Chirici, G. Integrating terrestrial and airborne laser scanning for the assessment of single-tree attributes in Mediterranean forest stands. Eur. J. Remote Sens. 2018, 51, 795–807. [Google Scholar] [CrossRef]
- Gülci, S. The determination of some stand parameters using SfM-based spatial 3D point cloud in forestry studies: An analysis of data production in pure coniferous young forest stands. Environ. Monit. Assess. 2019, 191, 495. [Google Scholar] [CrossRef]
- Gülci, S.; Akay, A.E.; Gülci, N.; Taş, İ. An assessment of conventional and drone-based measurements for tree attributes in timber volume estimation: A case study on stone pine plantation. Ecol. Inform. 2021, 63, 101303. [Google Scholar] [CrossRef]
- Molina-Valero, J.A.; Martínez-Calvo, A.; Villamayor, M.J.G.; Pérez, M.A.N.; Álvarez-González, J.G.; Montes, F.; Pérez-Cruzado, C. Operationalizing the use of TLS in forest inventories: The R package FORTLS. Environ. Model. Softw. 2022, 150, 105337. [Google Scholar] [CrossRef]
- Zhang, J.; Liang, H.; Tong, S.; Zhou, Y.; Kan, J. An advanced software platform and algorithmic framework for mobile dbh data acquisition. Forests 2023, 14, 2334. [Google Scholar] [CrossRef]
- Zgaren, A.; Bouachir, W.; Bouguila, N. Automatic counting of planting microsites via local visual detection and global count estimation. IEEE Trans. Emerg. Top. Comput. Intell. 2023, 7, 1746–1760. [Google Scholar] [CrossRef]
- Olofsson, K.; Holmgren, J. Single tree stem profile detection using terrestrial laser scanner data, flatness saliency features and curvature properties. Forests 2016, 7, 207. [Google Scholar] [CrossRef]
- Lisein, J.; Michez, A.; Claessens, H.; Lejeune, P. Discrimination of deciduous tree species from time series of unmanned aerial system imagery. PLoS ONE 2015, 10, e0141006. [Google Scholar] [CrossRef] [PubMed]
- Lian, X.; Zhang, H.; Xiao, W.; Lei, Y.; Ge, L.; Qin, K.; He, Y.; Dong, Q.; Li, L.; Han, Y.; et al. Biomass calculations of individual trees based on unmanned aerial vehicle multispectral imagery and laser scanning combined with terrestrial laser scanning in complex stands. Remote Sens. 2022, 14, 4715. [Google Scholar] [CrossRef]
- Dash, J.P.; Pearse, G.D.; Watt, M.S. UAV multispectral imagery can complement satellite data for monitoring forest health. Remote Sens. 2018, 10, 1216. [Google Scholar] [CrossRef]
- Fraser, B.T.; Congalton, R.G. Monitoring fine-scale forest health using unmanned aerial systems (UAS) multispectral models. Remote Sens. 2021, 13, 4873. [Google Scholar] [CrossRef]
- Penner, M.; Woods, M.; Bilyk, A. Assessing site productivity via remote sensing—Age-independent site index estimation in even-aged forests. Forests 2023, 14, 1541. [Google Scholar] [CrossRef]
- Cisternas, I.; Velásquez, I.; Caro, A.; Rodríguez, A. Systematic literature review of implementations of precision agriculture. Comput. Electron. Agric. 2020, 176, 105626. [Google Scholar] [CrossRef]
- Hernandez, A.; Murcia, H.; Copot, C.; De Keyser, R. Towards the development of a smart flying sensor: Illustration in the field of precision agriculture. Sensors 2015, 15, 16688–16709. [Google Scholar] [CrossRef]
- Jiang, W.; Yan, G.; Jiang, H.; Li, Y.; Ni, R.; Mu, X.; Xie, D.; Tang, H.; Ni-Meister, W. Accuracy assessment of GEDI and ICESat-2 canopy height products by excluding geolocation error based on virtual sampling units. IEEE Trans. Geosci. Remote Sens. 2025, 63, 5705021. [Google Scholar] [CrossRef]
- Lee, Y.; Woo, H.; Lee, J.-S. Forest inventory assessment using integrated light detection and ranging (LiDAR) systems: Merged point cloud of airborne and mobile laser scanning systems. Sens. Mater. 2022, 34, 4583–4597. [Google Scholar] [CrossRef]
- Görgens, E.B.; Mund, J.-P.; Cremer, T.; de Conto, T.; Krause, S.; Valbuena, R.; Rodriguez, L.C.E. Automated operational logging plan considering multi-criteria optimization. Comput. Electron. Agric. 2020, 170, 105253. [Google Scholar] [CrossRef]
- Akay, A.E.; Wing, M.G.; Sessions, J. Estimating sediment reduction cost for low-volume forest roads using a lidar-derived high-resolution DEM. Balt. J. Road Bridge Eng. 2014, 9, 52–57. [Google Scholar] [CrossRef]
- Roiha, J.; Tanhuanpää, T.; Hyyppä, J.; Holopainen, M. Precision forestry versus non-precision archaeology—Integrating forest management and archaeological site protection. Forests 2024, 15, 918. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).