

A Review of Selected Applications of GNSS CORS and Related Experiences at the University of Palermo (Italy)





Abstract
:
1. Introduction
2. Literature Background
2.1. Systematic Review Process
2.2. Background Articles on GNSS-CORS Network Monitoring
2.3. Background Articles on Reference Frames and Structure Monitoring
2.4. Background Articles on CORS Accuracy
3. Discussion
3.1. The UNIPA GNSS CORS Network Monitoring
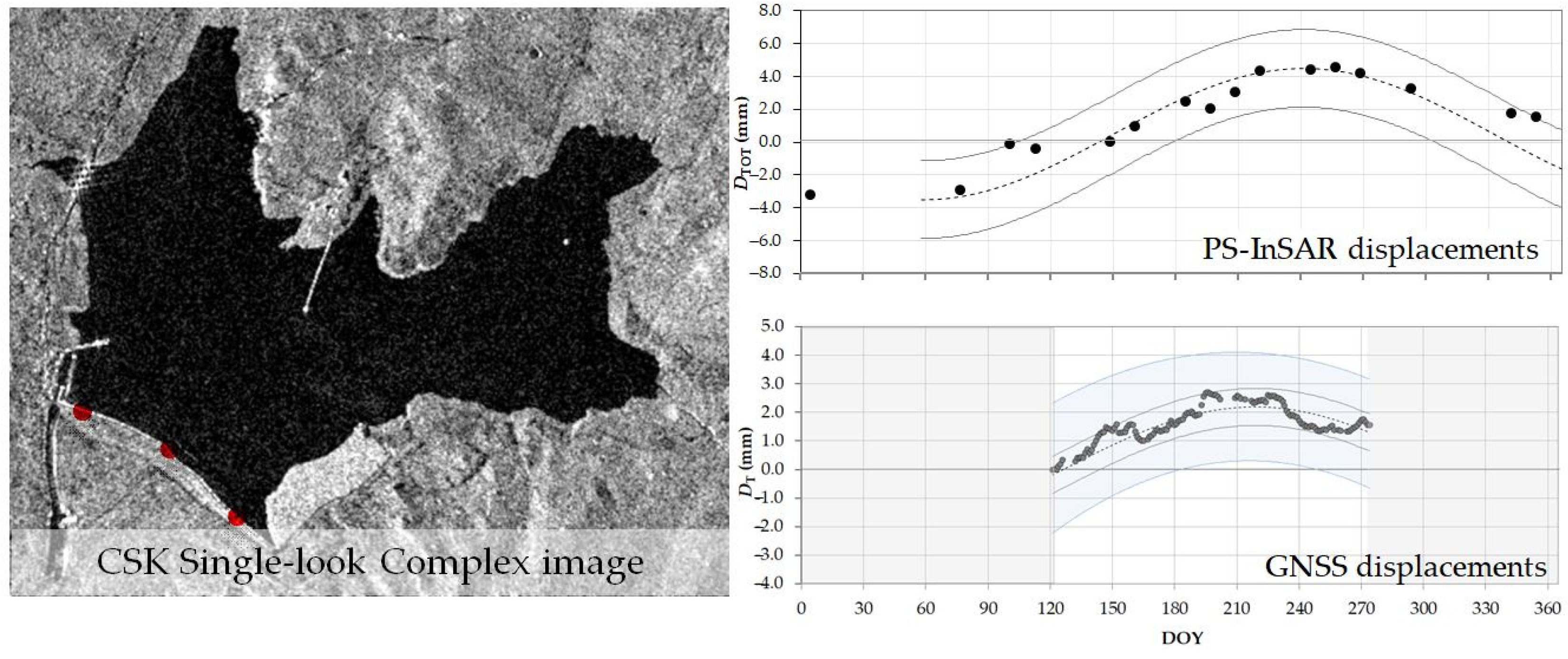
3.2. Monitoring and Displacements
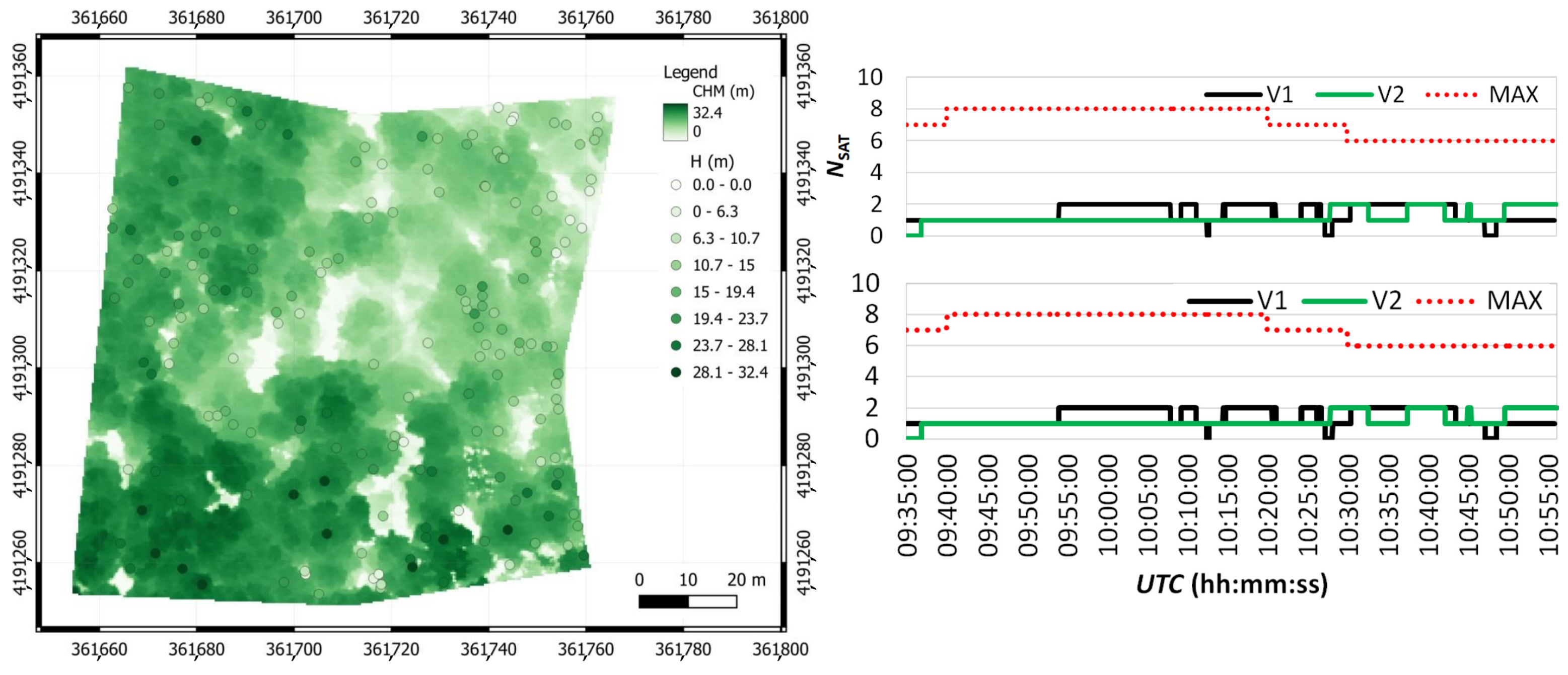
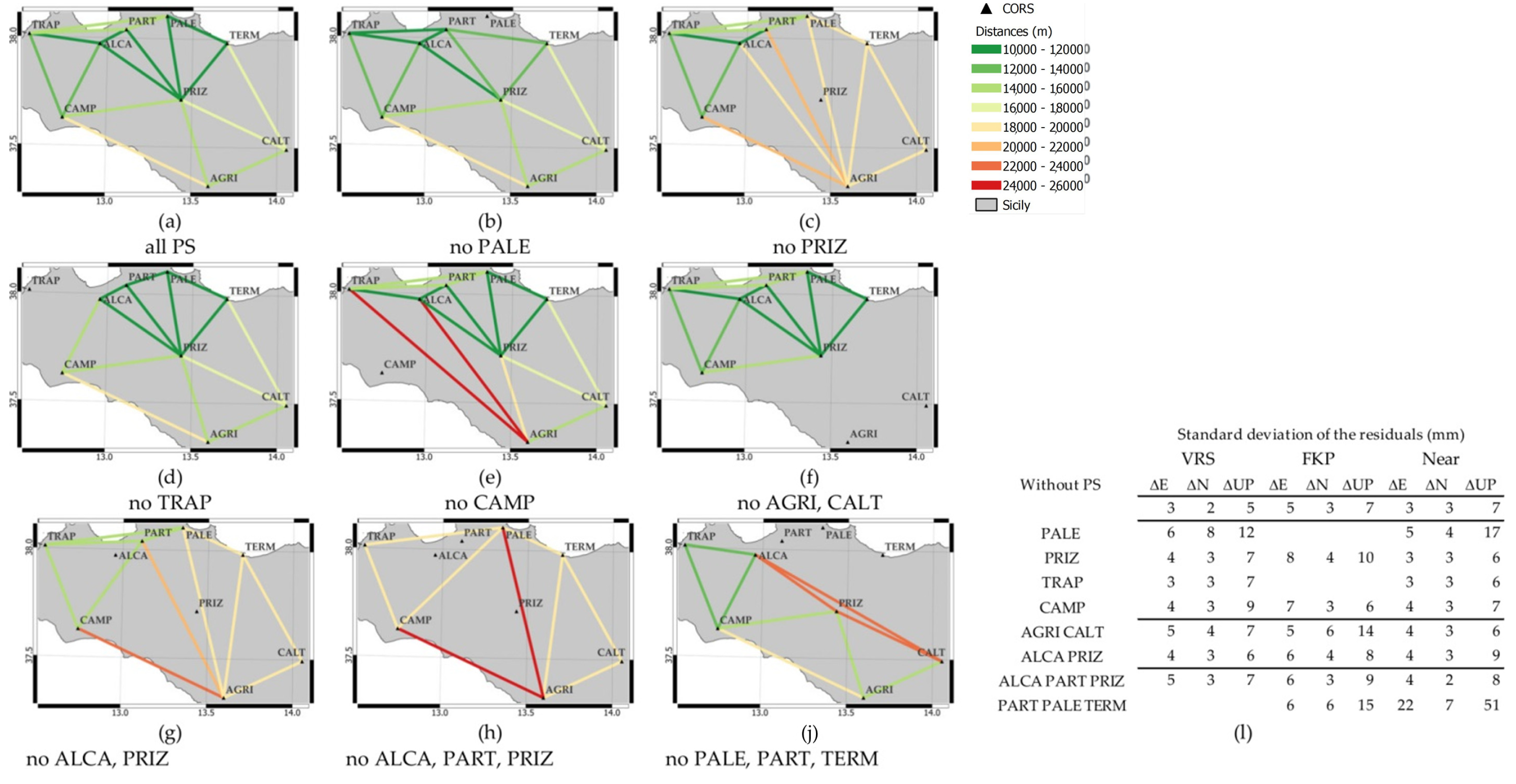
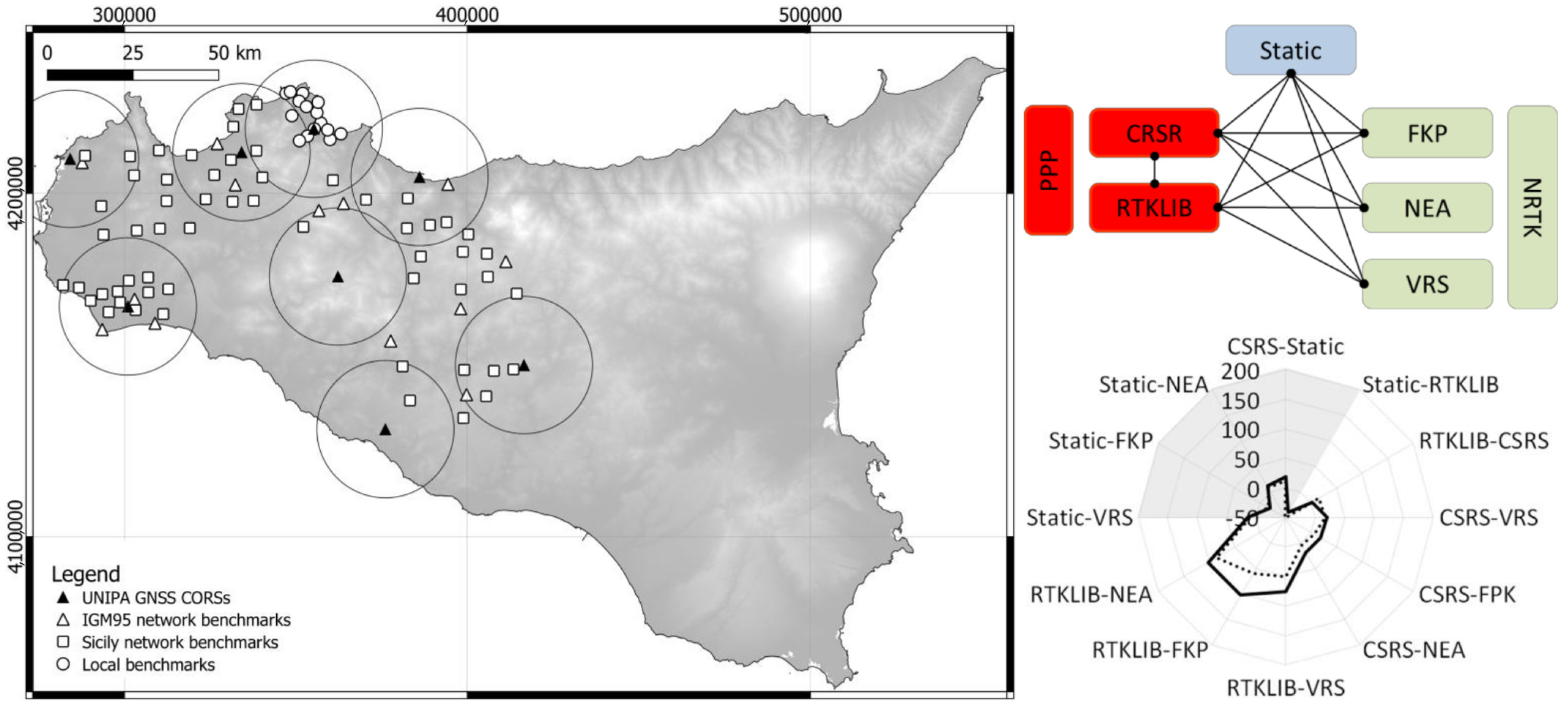
3.3. Application for Positioning Accuracy
4. Conclusions and Future Developments
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kissam, P. Surveying for Civil. Engineers; McGraw-Hill: New York, NY, USA, 1981; ISBN 978-0-07-034882-0. [Google Scholar]
- GPS. Available online: https://www.gps.gov/systems/gps/space (accessed on 22 September 2023).
- Galileo. Available online: https://www.gsc-europa.eu/system-service-status/constellation-information (accessed on 22 September 2023).
- GLONASS. Available online: https://www.glonass-iac.ru/en/sostavOG (accessed on 22 September 2023).
- BDS. Available online: http://www.csno-tarc.cn/en/system/constellation (accessed on 22 September 2023).
- QZSS. Available online: https://qzss.go.jp/en (accessed on 22 September 2023).
- KPS. Available online: https://www.gpsworld.com/korea-will-launch-its-own-satellite-positioning-system/ (accessed on 22 September 2023).
- IRNSS/NavIC. Available online: https://www.isro.gov.in/irnss-programme (accessed on 22 September 2023).
- Jin, S.; Wang, Q.; Dardanelli, G. A Review on Multi-GNSS for Earth Observation and Emerging Applications. Remote Sens. 2022, 14, 3930. [Google Scholar] [CrossRef]
- Anderson, R.; Chin, M.; Cline, M.; Hoar, D.; Murray, O.; Stone, W. National Continuously Operating Reference Station (National Cors) Site Monumentation. 2000. Available online: https://kb.unavco.org/kb/assets/285/CORS_Monumentation.pdf (accessed on 22 September 2023).
- ACIL Allen Consulting. The Value of Augmented GNSS in Australia. 2013. Available online: http://www.acilallen.com.au/cms_files/ACIL_GNSS_positioning.pdf (accessed on 22 September 2023).
- Siemuri, A.; Selvan, K.; Kuusniemi, H.; Valisuo, P.S.; Elmusrati, M.S. A Systematic Review of Machine Learning Techniques for GNSS Use Cases. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 5043–5077. [Google Scholar] [CrossRef]
- Kitchenham, B. Procedures for Performing Systematic Reviews. 2004. Available online: https://www.inf.ufsc.br/aldo.vw/kitchenham.pdf (accessed on 2 November 2023).
- Radočaj, D.; Plaščak, I.; Jurišić, M. Global Navigation Satellite Systems as State-of-the-Art Solutions in Precision Agriculture: A Review of Studies Indexed in the Web of Science. Agriculture 2023, 13, 1417. [Google Scholar] [CrossRef]
- Fortes, L.P.; Cannon, M.E.; Lachapelle, G.; Skone, S. Optimizing a network-based RTK method for OTF positioning. GPS Solut. 2003, 7, 61–73. [Google Scholar] [CrossRef]
- Pugliano, G.; Lachapelle, G. La collocazione nel posizionamento GPS network RTK [The least-squares collocation method applied to the network RTK GPS positioning]. Boll. Di Geod. E Sci. Affin. 2005, 64, 93–106. [Google Scholar]
- Grejner-Brzezinska, D.A.; Kashani, I.; Wielgosz, P. On accuracy and reliability of instantaneous network RTK as a function of network geometry, station separation, and data processing strategy. GPS Solut. 2005, 9, 212–225. [Google Scholar] [CrossRef]
- Grejner-Brzezinska, D.A.; Kashani, I.; Wielgosz, P.; Smith, D.A.; Spencer, P.S.J.; Robertson, D.S.; Mader, G.L. Efficiency and reliability of ambiguity resolution in network-based real-time kinematic GPS. J. Surv. Eng. 2007, 133, 56–65. [Google Scholar] [CrossRef]
- Kenyeres, A.; Bruyninx, C. EPN coordinate time series monitoring for reference frame maintenance. GPS Solut. 2004, 8, 200–209. [Google Scholar] [CrossRef]
- Soler, T.; Michalak, P.; Weston, N.D.; Snay, R.A.; Foote, R.H. Accuracy of OPUS solutions for 1- to 4-h observing sessions. GPS Solut. 2006, 10, 45–55. [Google Scholar] [CrossRef]
- Stone, W. The evolution of the national geodetic survey’s continuously operating reference station network and online positioning user service. In Proceedings of the 2006 IEEE/ION Position, Location, and Navigation Symposium, Coronado, CA, USA, 25–27 April 2006; Volume 1650658, pp. 653–663. [Google Scholar]
- Snay, R.A.; Soler, T. Continuously operating reference station (CORS): History, applications, and future enhancements. J. Surv. Eng. 2008, 134, 95–104. [Google Scholar] [CrossRef]
- Rizos, C.; Satirapod, C. Contribution of GNSS CORS infrastructure to the mission of modern geodesy and status of GNSS CORS in Thailand. Eng. J. 2011, 15, 25–42. [Google Scholar] [CrossRef]
- Mekik, C.; Yildirim, O.; Bakici, S. The Turkish real time kinematic GPS network (TUSAGA-Aktif) infrastructure. Sci. Res. Essays 2011, 6, 3986–3999. [Google Scholar]
- Odijk, D.; Teunissen, P.J.G.; Zhang, B. Single-frequency integer ambiguity resolution enabled GPS precise point positioning. J. Surv. Eng. 2012, 138, 193–202. [Google Scholar] [CrossRef]
- Li, B.; Teunissen, P.J.G. GNSS antenna array-aided CORS ambiguity resolution. J. Geod. 2014, 88, 363–376. [Google Scholar] [CrossRef]
- Liu, C.; Gao, W.; Jiang, L.; Zheng, F.; Lu, J.; Cai, H.; Chen, L. The Development and Performance Assessment of China’s CORS. J. Surv. Eng. 2023, 149, 04023007. [Google Scholar] [CrossRef]
- Gond, A.K.; Ohri, A.; Maurya, S.P.; Gaur, S. Accuracy Assessment of Relative GPS as a Function of Distance and Duration for CORS Network. J. Indian Soc. Remote Sens. 2023, 51, 1267–1277. [Google Scholar] [CrossRef]
- Abdallah, A.; Agag, T. Reliability of CSRS-PPP for Validating the Egyptian Geodetic Cors Networks. Artif. Satell. 2022, 57, 58–76. [Google Scholar] [CrossRef]
- Teferle, N.; Bingley, R.; Dodson, A.; Apostolidis, P.; Staton, G. RF Interference and Multipath Effects at Continuous GPS Installations for Long-Term Monitoring of Tide Gauges in UK Harbours. In Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, USA, 9–12 September 2003. [Google Scholar]
- Estey, L.H.; Meertens, C.M. TEQC: The Multi-Purpose Toolkit for GPS/GLONASS Data. GPS Solut. 1999, 3, 42–49. [Google Scholar] [CrossRef]
- Wessel, P.; Smith, W.H.F. A new Version of generic mapping tools released. EOS Trans. Am. Geophys. Union 1995, 79, 579. [Google Scholar] [CrossRef]
- Bhatti, J.A.; Humphreys, T.E.; Ledvina, B.M. Development and demonstration of a TDOA-based GNSS interference signal localization system. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 455–469. [Google Scholar] [CrossRef]
- Motella, B.; Pini, M.; Dovis, F. Investigation on the effect of strong out-of-band signals on global navigation satellite systems receivers. GPS Solut. 2008, 12, 77–86. [Google Scholar] [CrossRef]
- Akos, D.M. Who’s afraid of the spoofer? GPS/GNSS spoofing detection via automatic gain control (agc). Navig. J. Inst. Navig. 2012, 59, 281–290. [Google Scholar] [CrossRef]
- Jada, S.; Psiaki, M.; Landerkin, S.; Langel, S.; Scholz, A.; Joerger, M. Evaluation of PNT situational awareness algorithms and methods. In Proceedings of the 34th International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS+, St. Louis, MO, USA, 20–24 September 2021; pp. 816–833. [Google Scholar] [CrossRef]
- Hu, B.; Wu, C.; Li, J.; Li, X.; Liu, X. Communication Tower Based Experiment and Analysis of Differential Augmentation for Auto-Steering Guidance of Agricultural Machinery. Lect. Notes Electr. Eng. 2018, 497, 431–441. [Google Scholar] [CrossRef]
- Barr, S.P.; Swaszek, P.F.; Hartnett, R.J.; Johnson, G.W. Performance of multi-beacon DGPS. In Proceedings of the International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 28–30 January 2013; pp. 359–373. [Google Scholar]
- Morrison, A.; Sokolova, N.; Gerrard, N.; Rødningsby, A.; Rost, C.; Ruotsalainen, L. Radio-Frequency Interference Considerations for Utility of the Galileo E6 Signal Based on Long-Term Monitoring by ARFIDAAS. Navig. J. Inst. Navig. 2023, 70, navi.560. [Google Scholar] [CrossRef]
- Miguel, N.R.S.; Chen, Y.-H.; Lo, S.; Walter, T.; Akos, D. Calibration of RFI Detection Levels in a Low-Cost GNSS Monitor. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium—PLANS 2023, Monterey, CA, USA, 24–28 April 2023; pp. 520–535. [Google Scholar]
- Bock, Y.; Melgar, D. Physical applications of GPS geodesy: A review. Rep. Prog. Phys. 2016, 79, 106801. [Google Scholar] [CrossRef]
- He, X.; Montillet, J.-P.; Fernandes, R.; Bos, M.; Yu, K.; Hua, X.; Jiang, W. Review of current GPS methodologies for producing accurate time series and their error sources. J. Geodyn. 2017, 106, 12–29. [Google Scholar] [CrossRef]
- Soler, T.; Snay, R.A. Transforming positions and velocities between the international terrestrial reference frame of 2000 and North American datum of 1983. J. Surv. Eng. 2004, 130, 49–55. [Google Scholar] [CrossRef]
- Sánchez, L.; Brunini, C. Achievements and challenges of SIRGAS. Int. Assoc. Geod. Symp. 2009, 134, 161–166. [Google Scholar]
- Brunini, C.; Sanchez, L.; Drewes, H.; Costa, S.; Mackern, V.; Martínez, W.; Seemuller, W.; da Silva, A. Improved analysis strategy and accessibility of the SIRGAS reference frame. Int. Assoc. Geod. Symp. 2012, 136, 3–10. [Google Scholar]
- Wang, G.; Bao, Y.; Gan, W.; Geng, J.; Xiao, G.; Shen, J.S. NChina16: A stable geodetic reference frame for geological hazard studies in North China. J. Geodyn. 2018, 115, 10–22. [Google Scholar] [CrossRef]
- Yu, J.; Wang, G. Introduction to the GNSS geodetic infrastructure in the Gulf of Mexico Region. Surv. Rev. 2017, 49, 51–65. [Google Scholar] [CrossRef]
- Kearns, T.J.; Wang, G.; Turco, M.; Welch, J.; Tsibanos, V.; Liu, H. Houston16: A stable geodetic reference frame for subsidence and faulting study in the Houston metropolitan area, Texas, U.S. Geod. Geodyn. 2019, 10, 382–393. [Google Scholar] [CrossRef]
- Vestøl, O.; Ågren, J.; Steffen, H.; Kierulf, H.; Tarasov, L. NKG2016LU: A new land uplift model for Fennoscandia and the Baltic Region. J. Geod. 2019, 93, 1759–1779. [Google Scholar] [CrossRef]
- Sánchez, L.; Seemüller, W.; Drewes, H.; Mateo, L.; González, G.; da Silva, A.; Pampilló, J.; Martínez, W.; Cioce, V.; Cisneros, D.; et al. Long-Term Stability of the SIRGAS Reference Frame and Episodic Station Movements Caused by the Seismic Activity in the SIRGAS Region. Int. Assoc. Geod. Symp. 2013, 138, 153–161. [Google Scholar]
- Sánchez, L.; Drewes, H. Crustal deformation and surface kinematics after the 2010 earthquakes in Latin America. J. Geodyn. 2016, 102, 1–23. [Google Scholar] [CrossRef]
- Uzel, T.; Eren, K.; Gulal, E.; Tiryakioglu, I.; Dindar, A.A.; Yilmaz, H. Monitoring the tectonic plate movements in Turkey based on the national continuous GNSS network. Arab. J. Geosci. 2013, 6, 3573–3580. [Google Scholar] [CrossRef]
- Tiryakioglu, I.; Yigit, C.O.; Yavasoglu, H.; Saka, M.H.; Alkan, R.M. The determination of interseismic, coseismic and postseismic deformations caused by the Gökçeada-Samothraki earthquake (2014, Mw: 6.9) based on GNSS data. J. Afr. Earth Sci. 2017, 133, 86–94. [Google Scholar] [CrossRef]
- Tiryakioğlu, I. Geodetic aspects of the 19 May 2011 Simav earthquake in Turkey. Geomat. Nat. Hazards Risk 2015, 6, 76–89. [Google Scholar] [CrossRef]
- Murray, J.R.; Svarc, J. Global positioning system data collection, processing, and analysis conducted by the U.S. Geological Survey earthquake hazards program. Seismol. Res. Lett. 2017, 88, 916–925. [Google Scholar] [CrossRef]
- Herring, T.A.; Melbourne, T.I.; Murray, M.H.; Floyd, M.A.; Szeliga, W.M.; King, R.W.; Phillips, D.A.; Puskas, C.M.; Santillan, M.; Wang, L. Plate Boundary Observatory and related networks: GPS data analysis methods and geodetic products. Rev. Geophys. 2016, 54, 759–808. [Google Scholar] [CrossRef]
- Fay, N.P.; Bennett, R.A.; Hreinsdóttir, S. Contemporary vertical velocity of the central Basin and Range and uplift of the southern Sierra Nevada. Geophys. Res. Lett. 2008, 35, L20309. [Google Scholar] [CrossRef]
- Mora-Páez, H.; Kellogg, J.N.; Freymueller, J.T.; Mencin, D.; Fernandes, R.M.S.; Diederix, H.; LaFemina, P.; Cardona-Piedrahita, L.; Lizarazo, S.; Peláez-Gaviria, J.-R.; et al. Crustal deformation in the northern Andes–A new GPS velocity field. J. S. Am. Earth Sci. 2019, 89, 76–91. [Google Scholar] [CrossRef]
- Wang, G.; Liu, H.; Mattioli, G.S.; Braun, J.; Miller, M.M.; Feaux, K. Carib18: A stable geodetic reference frame for geological hazard monitoring in the caribbean region. Remote Sens. 2019, 11, 680. [Google Scholar] [CrossRef]
- Jade, S.; Rao, H.J.R.; Vijayan, M.S.M.; Gaur, V.K.; Bhatt, B.C.; Kumar, K.; Jaganathan, S.; Ananda, M.B.; Kumar, P.D. GPS-derived deformation rates in northwestern Himalaya and Ladakh. Int. J. Earth Sci. 2011, 100, 1293–1301. [Google Scholar] [CrossRef]
- Bisht, H.; Kotlia, B.S.; Kumar, K.; Dumka, R.K.; Taloor, A.K.; Upadhyay, R. GPS derived crustal velocity, tectonic deformation and strain in the Indian Himalayan arc. Quat. Int. 2021, 575–576, 141–152. [Google Scholar] [CrossRef]
- Gülal, E.; Erdoǧan, H.; Tiryakioǧlu, I. Research on the stability analysis of GNSS reference stations network by time series analysis. Digit. Signal Process. A Rev. J. 2013, 23, 1945–1957. [Google Scholar] [CrossRef]
- Bitharis, S.; Fotiou, A.; Pikridas, C.; Rossikopoulos, D. A new velocity field of greece based on seven years (2008–2014) continuously operating GPS station data. Int. Assoc. Geod. Symp. 2018, 147, 321–329. [Google Scholar]
- Sánchez, L.; Völksen, C.; Sokolov, A.; Arenz, H.; Seitz, F. Present-day surface deformation of the Alpine region inferred from geodetic techniques. Earth Syst. Sci. Data 2018, 10, 1503–1526. [Google Scholar] [CrossRef]
- Guo, W.; Wang, G.; Bao, Y.; Li, P.; Zhang, M.; Gong, Q.; Li, R.; Gao, Y.; Zhao, R.; Shen, S. Detection and monitoring of tunneling-induced riverbed deformation using gps and beidou: A case study. Appl. Sci. 2019, 9, 2759. [Google Scholar] [CrossRef]
- Yu, J.; Yan, B.; Meng, X.; Shao, X.; Ye, H. Measurement of bridge dynamic responses using network-based real-time kinematic gnss technique. J. Surv. Eng. 2016, 142, 04015013. [Google Scholar] [CrossRef]
- Jiang, W.; Liu, H.; Liu, W.; He, Y. CORS development for Xilongchi dam deformation monitoring. Wuhan Daxue Xuebao (Xinxi Kexue Ban)/Geomat. Inf. Sci. Wuhan Univ. 2012, 37, 949–952. [Google Scholar]
- Jing-Xiang, G.; Hong, H. Advanced GNSS technology of mining deformation monitoring. Procedia Earth Planet. Sci. 2009, 1, 1081–1088. [Google Scholar] [CrossRef]
- Guo, J.; Hu, J.; Li, B.; Zhou, L.; Wang, W. Land subsidence in Tianjin for 2015 to 2016 revealed by the analysis of Sentinel-1A with SBAS-InSAR. J. Appl. Remote Sens. 2017, 11, 026024. [Google Scholar] [CrossRef]
- Zhang, T.; Shen, W.-B.; Wu, W.; Zhang, B.; Pan, Y. Recent surface deformation in the Tianjin area revealed by Sentinel-1A data. Remote Sens. 2019, 11, 130. [Google Scholar] [CrossRef]
- Yalvac, S. Validating InSAR-SBAS results by means of different GNSS analysis techniques in medium- and high-grade deformation areas. Environ. Monit. Assess. 2020, 192, 120. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Odijk, D.; Zhang, B. PPP-RTK: Results of CORS network-based PPP with integer ambiguity resolution. J. Aeronaut. Astronaut. Aviat. 2010, 42, 223–230. [Google Scholar]
- Zhang, B.; Teunissen, P.J.G.; Odijk, D. A novel un-differenced PPP-RTK concept. J. Navig. 2011, 64 (Suppl. S1), S180–S191. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Eckl, M.C.; Snay, R.A.; Soler, T.; Cline, M.W.; Mader, G.L. Accuracy of GPS-derived relative positions as a function of interstation distance and observing-session duration. J. Geod. 2001, 75, 633–640. [Google Scholar] [CrossRef]
- Feng, Y.; Rizos, C. Network-based geometry-free three carrier ambiguity resolution and phase bias calibration. GPS Solut. 2009, 13, 43–56. [Google Scholar] [CrossRef]
- Eren, K.; Uzel, T.; Gulal, E.; Yildirim, O.; Cingoz, A. Results from a comprehensive global navigation satellite system test in the CORS-TR network: Case study. J. Surv. Eng. 2009, 135, 10–18. [Google Scholar] [CrossRef]
- Li, B.; Shen, Y.; Feng, Y.; Gao, W.; Yang, L. GNSS ambiguity resolution with controllable failure rate for long baseline network RTK. J. Geod. 2014, 88, 99–112. [Google Scholar] [CrossRef]
- Dabove, P.; Manzino, A.M.; Taglioretti, C. GNSS network products for post-processing positioning: Limitations and peculiarities. Appl. Geomat. 2014, 6, 27–36. [Google Scholar] [CrossRef]
- Schwarz, C.R.; Snay, R.A.; Soler, T. Accuracy assessment of the national geodetic survey’s OPUS-RS utility. GPS Solut. 2009, 13, 119–132. [Google Scholar] [CrossRef]
- Aponte, J.; Meng, X.; Hill, C.; Moore, T.; Dodson, A.; Burbidge, M. Quality assessment of a network-based RTK GPS service in the UK Jose. J. Appl. Geod. 2009, 3, 25–34. [Google Scholar]
- Edwards, S.J.; Clarke, P.J.; Penna, N.T.; Goebell, S. An examination of network RTK GPS services in Great Britain. Surv. Rev. 2010, 42, 107–121. [Google Scholar] [CrossRef]
- Ding, W.; Tan, B.; Chen, Y.; Teferle, F.N.; Yuan, Y. Evaluation of a regional real-time precise positioning system based on GPS/BeiDou observations in Australia. Adv. Space Res. 2018, 61, 951–961. [Google Scholar] [CrossRef]
- Jackson, J.; Davis, B.; Gebre-Egziabher, D. A performance assessment of low-cost RTK GNSS receivers. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium—PLANS 2018, Monterey, CA, USA, 23–26 April 2018; pp. 642–649. [Google Scholar]
- Netthonglang, C.; Thongtan, T.; Satirapod, C. GNSS Precise Positioning Determinations Using Smartphones. In Proceedings of the APCCAS 2019: IEEE Asia Pacific Conference on Circuits and Systems: Innovative CAS Towards Sustainable Energy and Technology Disruption, Bangkok, Thailand, 11–14 November 2019; pp. 401–404. [Google Scholar]
- Pepe, M. Cors architecture and evaluation of positioning by low-cost gnss receiver. Geod. Cartogr. 2018, 44, 36–44. [Google Scholar] [CrossRef]
- Forlani, G.; Dall'Asta, E.; Diotri, F.; di Cella, U.M.; Roncella, R.; Santise, M. Quality assessment of DSMs produced from UAV flights georeferenced with on-board RTK positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef]
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Coastal mapping using dji phantom 4 RTK in post-processing kinematic mode. Drones 2020, 4, 9. [Google Scholar] [CrossRef]
- Zeybek, M. Accuracy assessment of direct georeferencing UAV images with onboard global navigation satellite system and comparison of CORS/RTK surveying methods. Meas. Sci. Technol. 2021, 32, 065402. [Google Scholar] [CrossRef]
- Williams, S.D.P.; Bock, Y.; Fang, P.; Jamason, P.; Nikolaidis, R.M.; Prawirodirdjo, L.; Miller, M.; Johnson, D.J. Error analysis of continuous GPS position time series. J. Geophys. Res. Solid Earth 2004, 109, 1–19. [Google Scholar] [CrossRef]
- Van Dierendonck, A.J.; Fenton, P.; Ford, T. Theory and Performance of Narrow Correlator Spacing in a GPS Receiver. Navigation 1992, 39, 265–283. [Google Scholar] [CrossRef]
- Yang, B.; Yang, Z.; Tian, Z.; Liang, P. Weakening the Flicker Noise in GPS Vertical Coordinate Time Series Using Hybrid Approaches. Remote Sens. 2023, 15, 1716. [Google Scholar] [CrossRef]
- Sun, C.; Cheong, J.W.; Dempster, A.G.; Zhao, H.; Feng, W. GNSS spoofing detection by means of signal quality monitoring (SQM) metric combinations. IEEE Access 2018, 6, 66428–66441. [Google Scholar] [CrossRef]
- Andreotti, M.; Aquino, M.; Woolfson, M.; Walker, J.; Moore, T. Signal propagation analysis and signature extraction for GNSS indoor positioning. In Proceedings of the IEEE PLANS, Position Location and Navigation Symposium, Coronado, CA, USA, 25–27 April 2006; pp. 913–919. [Google Scholar]
- Zhao, Q.; Zhang, K.; Yao, Y.; Li, X. A new troposphere tomography algorithm with a truncation factor model (TFM) for GNSS networks. GPS Solut. 2019, 23, 64. [Google Scholar] [CrossRef]
- Tsugawa, T.; Saito, A.; Otsuka, Y.; Yamamoto, M. Damping of large-scale traveling ionospheric disturbances detected with GPS networks during the geomagnetic storm. J. Geophys. Res. Space Phys. 2003, 108, 1127. [Google Scholar] [CrossRef]
- Komjathy, A.; Sparks, L.; Wilson, B.D.; Mannucci, A.J. Automated daily processing of more than 1000 ground-based GPS receivers for studying intense ionospheric storms. Radio Sci. 2005, 40, 1–11. [Google Scholar] [CrossRef]
- Wielgosz, P.; Kashani, I.; Grejner-Brzezinska, D. Analysis of long-range network RTK during a severe ionospheric storm. J. Geod. 2005, 79, 524–531. [Google Scholar] [CrossRef]
- Lee, J.; Pullen, S.; Datta-Barua, S.; Enge, P. Assessment of nominal ionosphere spatial decorrelation for LAAS. In Proceedings of the IEEE PLANS, Position Location and Navigation Symposium, Coronado, CA, USA, 25–27 April 2006; pp. 506–514. [Google Scholar]
- Hong, C.-K.; Grejner-Brzezinska, D.A.; Kwon, J.H. Efficient GPS receiver DCB estimation for ionosphere modeling using satellite-receiver geometry changes. Earth Planets Space 2008, 60, e25–e28. [Google Scholar] [CrossRef]
- Ji, S.; Chen, W.; Ding, X.; Zhao, C. Equatorial ionospheric zonal drift by monitoring local GPS reference networks. J. Geophys. Res. Space Phys. 2011, 116, A08310. [Google Scholar] [CrossRef]
- Zhang, B.; Zhao, C.; Odolinski, R.; Liu, T. Functional model modification of precise point positioning considering the time-varying code biases of a receiver. Satell. Navig. 2021, 2, 11. [Google Scholar] [CrossRef]
- Xiao, G.; Ou, J.; Liu, G.; Zhang, H. Construction of a regional precise tropospheric delay model based on improved BP neural network. Acta Geophys. Sin. 2018, 61, 3139–3148. [Google Scholar]
- Graffigna, V.; Hernández-Pajares, M.; Gende, M.; Azpilicueta, F.; Antico, P. Interpretation of the Tropospheric Gradients Estimated with GPS During Hurricane Harvey. Earth Space Sci. 2019, 6, 1348–1365. [Google Scholar] [CrossRef]
- Devoti, R.; D’Agostino, N.; Serpelloni, E.; Pietrantonio, G.; Riguzzi, F.; Avallone, A.; Cavaliere, A.; Cheloni, D.; Cecere, G.; D’Ambrosio, C.; et al. A combined velocity field of the mediterranean region. Ann. Geophys. 2017, 60, S0215. [Google Scholar] [CrossRef]
- Avallone, A.; Selvaggi, G.; D’Anastasio, E.; D’Agostino, N.; Pietrantonio, G.; Riguzzi, F.; Serpelloni, E.; Anzidei, M.; Casula, G.; Cecere, G.; et al. The RING network: Improvements to a GPS velocity field in the central Mediterranean. Ann. Geophys. 2010, 53, 39–54. [Google Scholar] [CrossRef]
- Siornet GPS Network ISPRA. Available online: https://www.isprambiente.gov.it/en/projects/soil-and-territory/siornet-permanent-gps-network/siornet-permanent-gps-network (accessed on 22 September 2023).
- Dardanelli, G.; Lo Brutto, M.; Pipitone, C. GNSS Cors Network of the University of Palermo: Design and First Analysis of Data. Geogr. Tech. 2020, 15, 43–69. [Google Scholar] [CrossRef]
- Topcon GNSS Network. Available online: https://www.topconpositioning.com/surveying/gnss-reference-network (accessed on 22 September 2023).
- Dardanelli, G.; Sansone Santamaria, A. RFI: A case study of the University of Palermo. In Proceedings of the 5th International Conference and Exhibition Melaha (Egypt), Cairo, Egypt, 3–5 May 2010. [Google Scholar]
- Dardanelli, G.; La Loggia, G.; Perfetti, N.; Capodici, F.; Puccio, L.; Maltese, A. Monitoring displacements of an earthen dam using GNSS and remote sensing. In Proceedings of SPIE—The International Society for Optical Engineering; SPIE: Bellingham, WA, USA, 2014. [Google Scholar]
- Dardanelli, G.; Pipitone, C. Hydraulic models and finite elements for monitoring of an earth dam, by using GNSS techniques. Period. Polytech. Civ. Eng. 2017, 61, 421–433. [Google Scholar] [CrossRef]
- Pipitone, C.; Maltese, A.; Dardanelli, G.; Lo Brutto, M.; La Loggia, G. Monitoring water surface and level of a reservoir using different remote sensing approaches and comparison with dam displacements evaluated via GNSS. Remote Sens. 2018, 10, 71. [Google Scholar] [CrossRef]
- Maltese, A.; Pipitone, C.; Dardanelli, G.; Capodici, F.; Muller, J.-P. Toward a Comprehensive Dam Monitoring: On-Site and Remote-Retrieved Forcing Factors and Resulting Displacements (GNSS and PS–InSAR). Remote Sens. 2021, 13, 1543. [Google Scholar] [CrossRef]
- Stocchi, P.; Antonioli, F.; Montagna, P.; Pepe, F.; Lo Presti, V.; Caruso, A.; Corradino, M.; Dardanelli, G.; Renda, P.; Frank, N.; et al. A stalactite record of four relative sea-level highstands during the Middle Pleistocene Transition. Quat. Sci. Rev. 2017, 173, 92–100. [Google Scholar] [CrossRef]
- Parrino, N.; Pepe, F.; Burrato, P.; Dardanelli, G.; Corradino, M.; Pipitone, C.; Morticelli, M.G.; Sulli, A.; Di Maggio, C. Elusive active faults in a low strain rate region (Sicily, Italy): Hints from a multidisciplinary land-to-sea approach. Tectonophysics 2022, 839, 229520. [Google Scholar] [CrossRef]
- Pipitone, C.; Dardanelli, G.; Lo Brutto, M.; Bruno, V.; Mattia, M.; Guglielmino, F.; Rossi, M.; Barreca, G. Use of CORS Time Series for Geodynamics Applications in Western Sicily (Italy). Commun. Comput. Inf. Sci. 2020, 1246, 61–76. [Google Scholar]
- Barreca, G.; Bruno, V.; Dardanelli, G.; Guglielmino, F.; Lo Brutto, M.; Mattia, M.; Pipitone, C.; Rossi, M. An integrated geodetic and InSAR technique for the monitoring and detection of active faulting in southwestern Sicily. Ann. Geophys. 2020, 63, EP03. [Google Scholar] [CrossRef]
- Dardanelli, G.; Paliaga, S.; Allegra, M.; Carella, M.; Giammarresi, V. Geomatic applications tourban park in palermo. Geogr. Tech. 2015, 10, 28–43. [Google Scholar]
- Dardanelli, G.; Carella, M. Integrated surveyng with mobile mapping system, egnos, ntrk and laser technologies in the park “Ninni Cassara” in Palermo. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 2, 95–100. [Google Scholar] [CrossRef]
- Sferlazza, S.; Maltese, A.; Dardanelli, G.; La Mela Veca, D.S. Optimizing the Sampling Area across an Old-Growth Forest via UAV-Borne Laser Scanning, GNSS, and Radial Surveying. ISPRS Int. J. Geo-Inf. 2022, 11, 168. [Google Scholar] [CrossRef]
- Angrisano, A.; Dardanelli, G.; Innac, A.; Pisciotta, A.; Pipitone, C.; Gaglione, S. Performance assessment of PPP surveys with open source software using the GNSS GPS-GLONASS-Galileo constellations. Appl. Sci. 2020, 10, 5420. [Google Scholar] [CrossRef]
- Dardanelli, G.; Pipitone, C. The effects of cors network geometry and differential nrtk corrections on gnss solutions. Geogr. Tech. 2021, 16, 56–69. [Google Scholar] [CrossRef]
- Catania, P.; Comparetti, A.; Febo, P.; Morello, G.; Orlando, S.; Roma, E.; Vallone, M. Positioning accuracy comparison of GNSS receivers used for mapping and guidance of agricultural machines. Agronomy 2020, 10, 924. [Google Scholar] [CrossRef]
- Dardanelli, G.; Maltese, A.; Pipitone, C.; Pisciotta, A.; Lo Brutto, M. Nrtk, ppp or static, that is the question. Testing different positioning solutions for gnss survey. Remote Sens. 2021, 13, 1406. [Google Scholar] [CrossRef]
- Dardanelli, G.; Maltese, A. On the Accuracy of Cadastral Marks: Statistical Analyses to Assess the Congruence among GNSS-Based Positioning and Official Maps. Remote Sens. 2022, 14, 4086. [Google Scholar] [CrossRef]
- Ammoscato, A.; Corsale, R.; Dardanelli, G.; Scianna, A.; Villa, B. GPS-GIS integrated system for electromagnetic pollution. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2008, 37, 491–497. [Google Scholar]
- Dardanelli, G.; Marretta, R.; Santamaria, A.S.; Streva, A.; Lo Brutto, M.; Maltese, A. Analysis of technical criticalities for GIS modelling an Urban noise. Geogr. Tech. 2017, 12, 41–61. [Google Scholar] [CrossRef]
- White, A.M.; Gardner, W.P.; Borsa, A.A.; Argus, D.F.; Martens, H.R. A Review of GNSS/GPS in Hydrogeodesy: Hydrologic Loading Applications and Their Implications for Water Resource Research. Water Resour. Res. 2022, 58, e2022WR032078. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CORS | ETRF2000 Epoch 2008.0 | IGb08 Epoch 2008.0 | ||||
|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) | |
| AGRI | 4,936,331.298 | 1,194,330.469 | 3,845,900.834 | 4,936,330.975 | 1,194,330.805 | 3,845,901.113 |
| ALCA | 4,906,356.920 | 1,128,732.790 | 3,903,344.287 | 4,906,356.527 | 1,128,733.024 | 3,903,344.578 |
| CALT | 4,915,665.644 | 1,230,635.292 | 3,861,348.275 | 4,915,665.317 | 1,230,635.627 | 3,861,348.553 |
| CAMP | 4,933,161.054 | 1,115,797.238 | 3,873,024.868 | 4,933,160.640 | 1,115,797.477 | 3,873,025.139 |
| PALE | 4,889,534.473 | 1,160,203.648 | 3,914,738.514 | 4,889,534.164 | 1,160,203.926 | 3,914,738.891 |
| PART | 4,898,768.970 | 1,140,862.867 | 3,909,130.415 | 4,898,768.541 | 1,140,863.11 | 3,909,130.693 |
| PRIZ | 4,914,033.464 | 1,174,031.855 | 3,881,405.827 | 4,914,033.044 | 1,174,032.102 | 3,881,406.106 |
| TERM | 4,890,361.337 | 1,192,337.028 | 3,904,013.032 | 4,890,360.965 | 1,192,337.292 | 3,904,013.365 |
| TRAP | 4,911,563.389 | 1,092,566.455 | 3,906,585.782 | 4,911,562.977 | 1,092,566.697 | 3,906,586.062 |
| GNSS Constellation(s) | Estimated ZTD | Saastamoinen Model | ||||
|---|---|---|---|---|---|---|
| σEast (m) | σNorth (m) | σUp (m) | σEast (m) | σNorth (m) | σUp (m) | |
| GPS | 23 | 27 | 38 | 74 | 33 | 60 |
| GLONASS | 28 | 24 | 11 | 87 | 29 | 60 |
| Galileo | 30 | 29 | 16 | 101 | 51 | 67 |
| GPS + GLONASS | 25 | 10 | 10 | 69 | 17 | 55 |
| GPS + Galileo | 10 | 10 | 6 | 160 | 40 | 63 |
| GLONASS + Galileo | 33 | 26 | 23 | 77 | 28 | 59 |
| GPS + GLONASS + Galileo | 30 | 17 | 13 | 74 | 22 | 68 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pipitone, C.; Maltese, A.; Lo Brutto, M.; Dardanelli, G. A Review of Selected Applications of GNSS CORS and Related Experiences at the University of Palermo (Italy). Remote Sens. 2023, 15, 5343. https://doi.org/10.3390/rs15225343
Pipitone C, Maltese A, Lo Brutto M, Dardanelli G. A Review of Selected Applications of GNSS CORS and Related Experiences at the University of Palermo (Italy). Remote Sensing. 2023; 15(22):5343. https://doi.org/10.3390/rs15225343
Chicago/Turabian StylePipitone, Claudia, Antonino Maltese, Mauro Lo Brutto, and Gino Dardanelli. 2023. "A Review of Selected Applications of GNSS CORS and Related Experiences at the University of Palermo (Italy)" Remote Sensing 15, no. 22: 5343. https://doi.org/10.3390/rs15225343
APA StylePipitone, C., Maltese, A., Lo Brutto, M., & Dardanelli, G. (2023). A Review of Selected Applications of GNSS CORS and Related Experiences at the University of Palermo (Italy). Remote Sensing, 15(22), 5343. https://doi.org/10.3390/rs15225343