
Angle Estimation for MIMO Radar in the Presence of Gain-Phase Errors with One Instrumental Tx/Rx Sensor: A Theoretical and Numerical Study


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Unlike the existing frameworks, the proposed estimator is suitable for MIMO radar with only one instrumental Tx/Rx sensor. This improvement benefits from the fact that the stochastic feature of the phase error is taken into account in the proposed estimator. Moreover, it is adaptive to arbitrary Tx/Rx sensor geometries;
- The proposed estimator is computationally friendly. The DOD/DOA estimation in the proposed estimator can be accomplished via the combination of one-dimensional grid searching and least squares (LS) fitting. It does not involve eigen decomposition or high-dimension spectrum searching.
2. Problem Formulation
3. The Proposed Framework
3.1. Estimation of the Corrupted Direction Matrices
3.2. DOD and DOA Estimation
4. Algorithmic Analysis
4.1. Related Remarks
4.2. Identifiability
4.3. Deterministic CRB
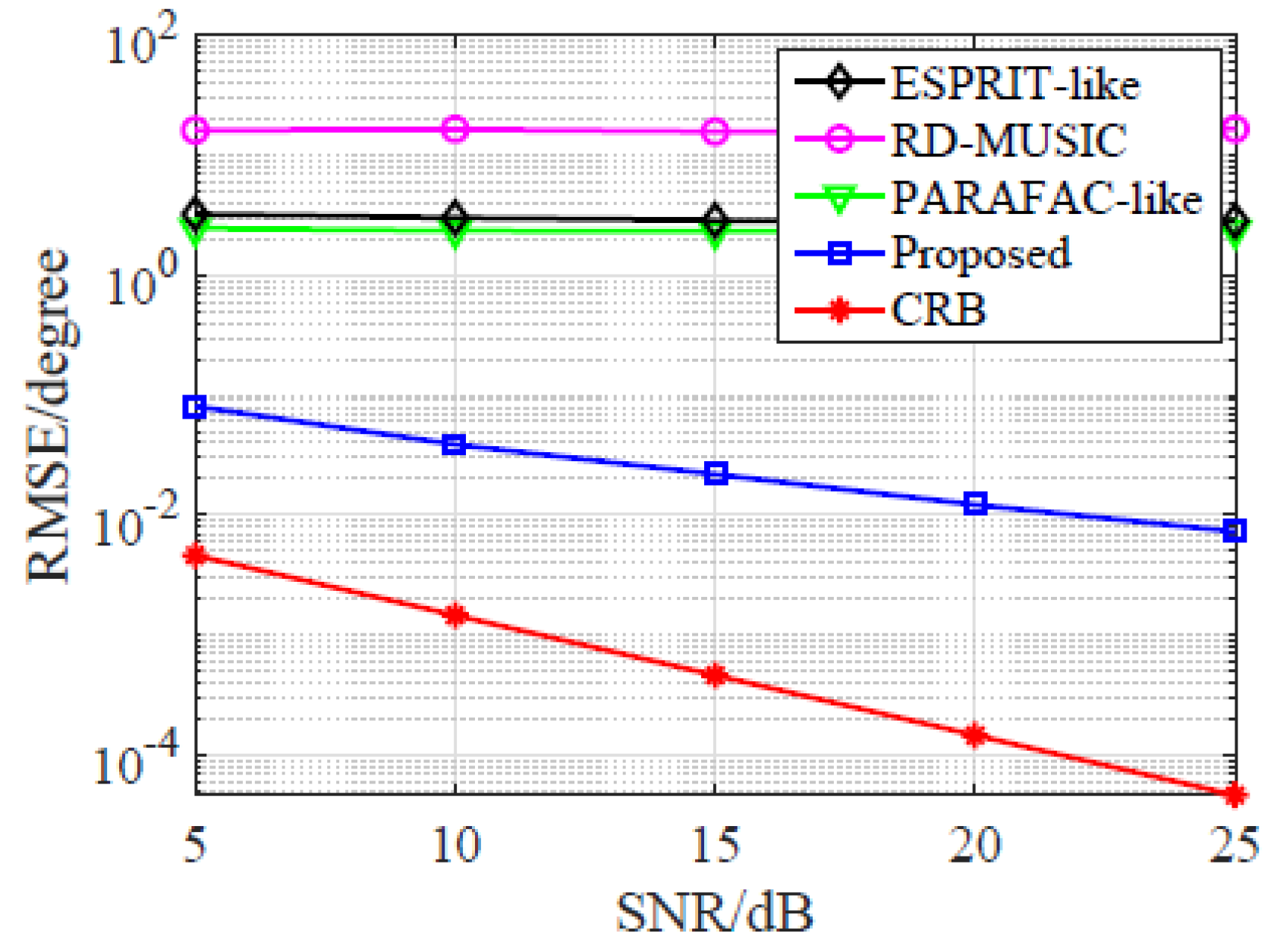
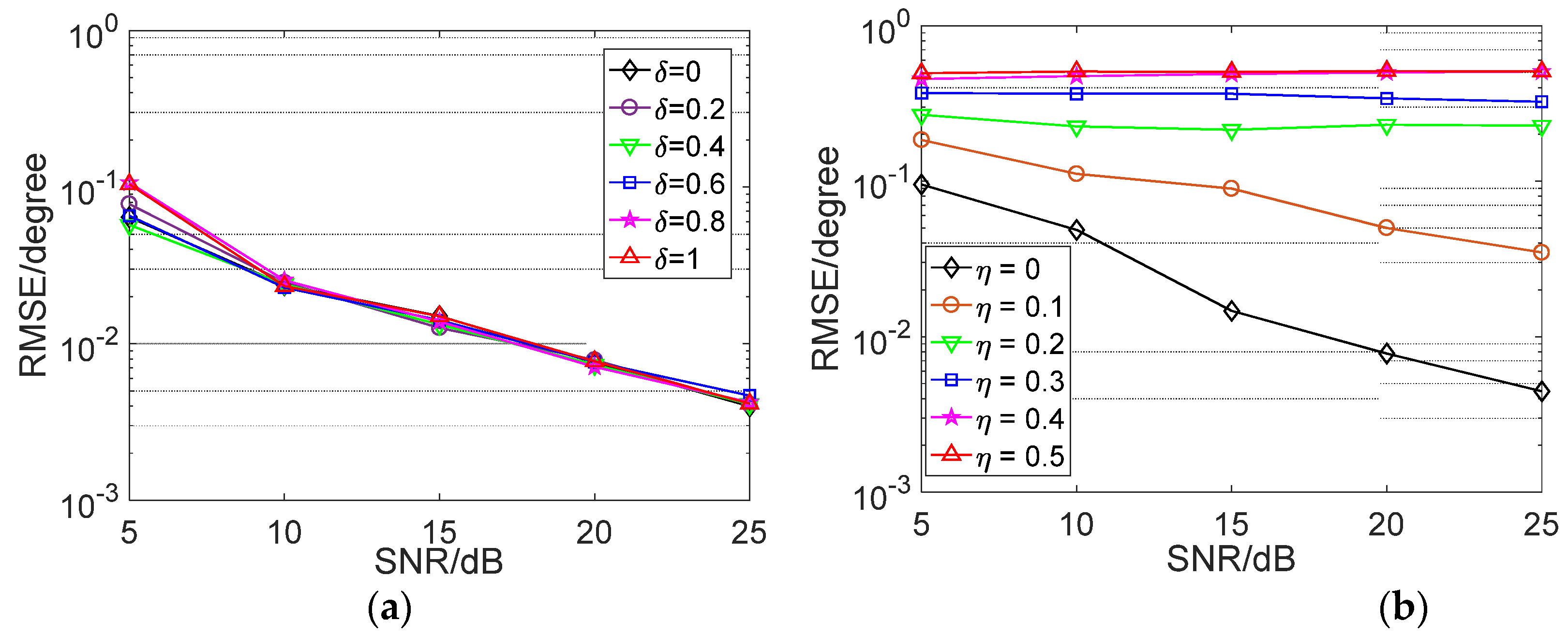
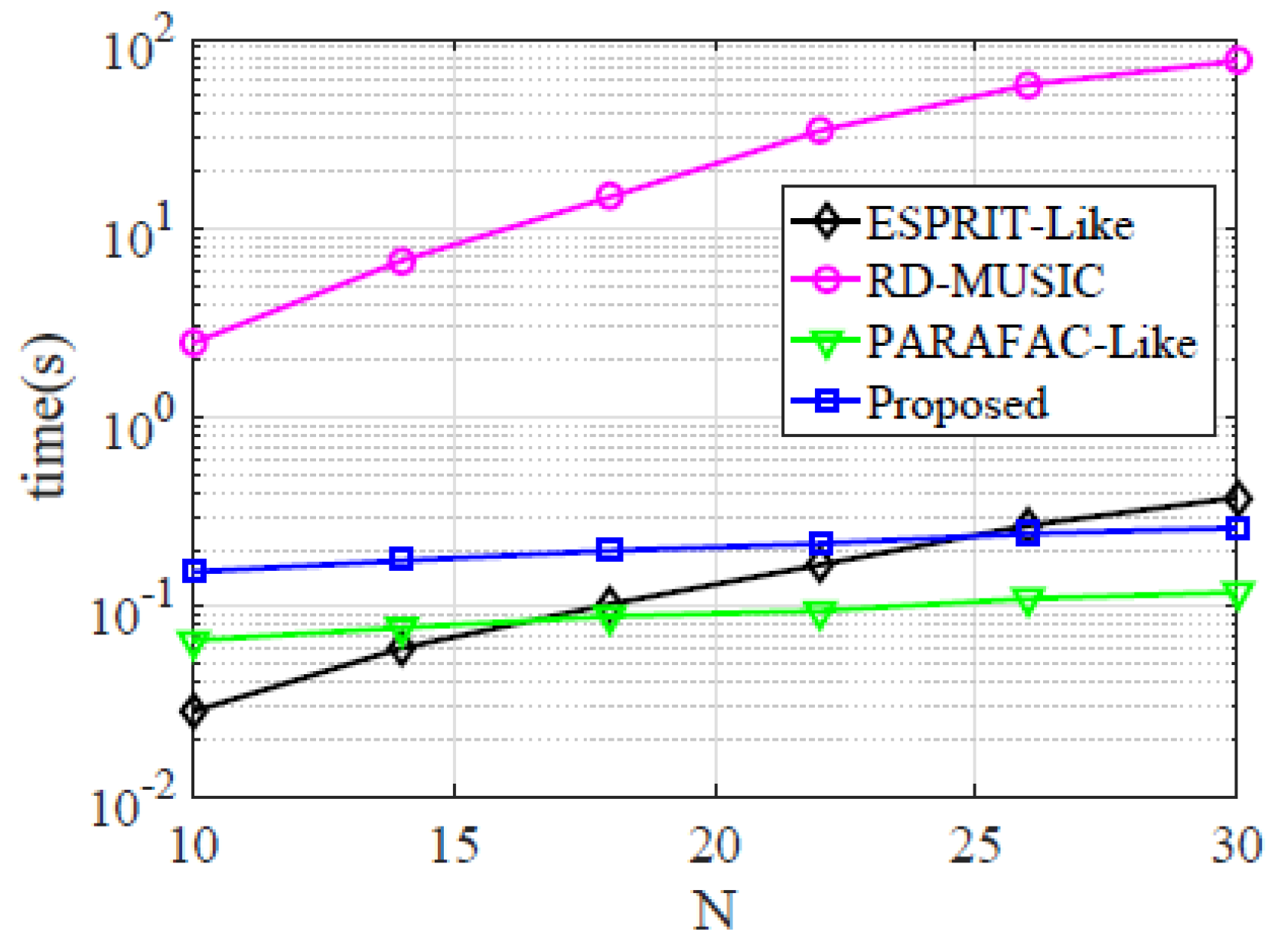
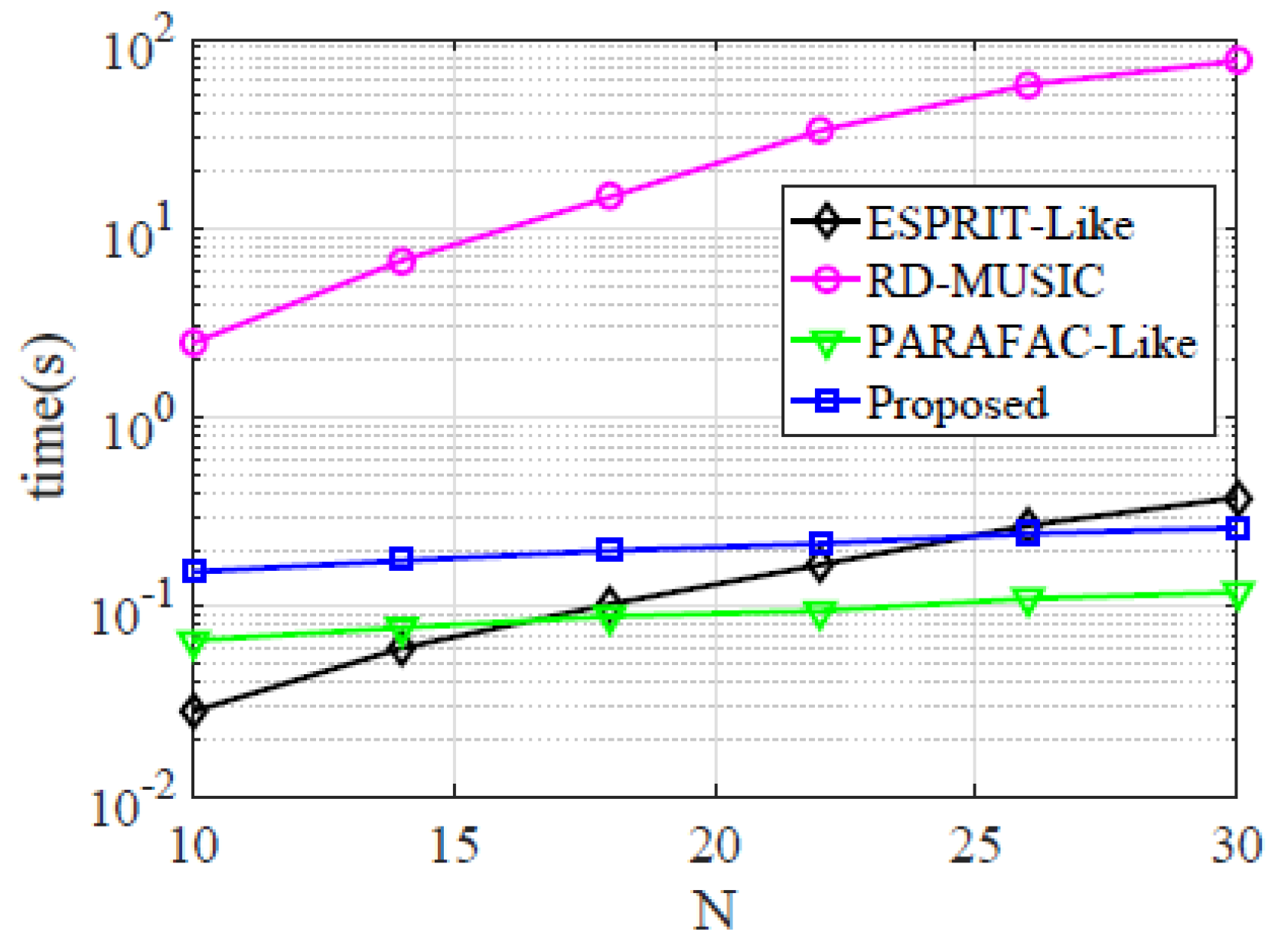
5. Simulation Results
6. Conclusions and Future Research
Author Contributions
Funding
Conflicts of Interest
References
- Liu, J.; Biondi, F.; Orlando, D.; Farina, A. Training data classification algorithms for radar applications. IEEE Signal Process. Lett. 2019, 26, 1446–1450. [Google Scholar] [CrossRef]
- Biondi, F.; Clemente, C.; Orlando, D. An atmospheric phase screen estimation strategy based on multichromatic analysis for differential interferometric synthetic aperture radar. IEEE Trans Geos. Remote Sens. 2019, 57, 7269–7280. [Google Scholar] [CrossRef]
- Biondi, F.; Addabbo, P.; Clemente, C.; Ullo, S.L.; Orlando, D. Monitoring of critical infrastructures by micromotion estimation: The mosul dam destabilization. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6337–6351. [Google Scholar] [CrossRef]
- Biondi, F.; Addabbo, P.; Clemente, C.; Orlando, D. Measurements of surface river doppler velocities with along-track InSAR using a single antenna. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 987–997. [Google Scholar] [CrossRef]
- Biondi, F.; Clemente, C.; Orlando, D. An eigenvalue-based approach for structure classification in polarimetric SAR images. IEEE Geos. Remote Sens. Lett. 2020, 17, 1003–1007. [Google Scholar] [CrossRef] [Green Version]
- Yan, H.; Li, J.; Liao, G. multitarget identification and localization using bistatic MIMO radar systems. EURASIP J. Adv. Signal Process. 2008, 1, 48. [Google Scholar] [CrossRef] [Green Version]
- Bekkerman, I.; Tabrikian, J. Target detection and localization using MIMO radars and sonars. IEEE Trans. Signal Process. 2006, 54, 3873–3883. [Google Scholar] [CrossRef]
- Wen, F.; Shi, J.; Zhang, Z. Closed-form estimation algorithm for EMVS-MIMO radar with arbitrary sensor geometry. Signal Process. 2021, 186, 108117. [Google Scholar] [CrossRef]
- Wan, L.; Liu, K.; Liang, Y.C.; Zhu, T. DOA and polarization estimation for non-circular signals in 3-D millimeter wave polarized massive MIMO systems. IEEE Wirel. Commun. 2021, 20, 3152–3167. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, Z.; Xu, L.; Xu, D. Trilinear decomposition-based transmit angle and receive angle estimation for multiple-input multiple-output radar. IET Radar Sonar Nav. 2011, 5, 626–631. [Google Scholar] [CrossRef]
- Liu, X.; Liao, G. Multitarget localization and estimation of gain phase error for bistatic MIMO radar. Acta Electron. Sin. 2011, 39, 596601. [Google Scholar]
- Guo, Y.; Zhang, Y.; Tong, N. ESPRIT-like angle estimation for bistatic MIMO radar with gain and phase uncertainties. Electron. Lett. 2011, 47, 996–997. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.; Cao, R.; Zhou, M. Reduced-dimension MUSIC for angle and array gain-phase error estimation in bistatic MIMO radar. IEEE Commun. Lett. 2013, 17, 443–446. [Google Scholar] [CrossRef]
- Li, J.; Jin, M.; Zheng, Y.; Liao, G.; Lv, L. Transmit and receive array gain-phase error estimation in bistatic MIMO radar. IEEE Antenn. Wirel. Propag. Lett. 2015, 14, 32–35. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.; Gao, X. A joint scheme for angle and array gain-phase error estimation in bistatic MIMO radar. IEEE Geos. Remote Sens. Lett. 2013, 10, 1478–1482. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X. A method for joint angle and array gain-phase error estimation in bistatic multiple-input multiple-output non-linear arrays. IET Signal Process. 2014, 8, 131–137. [Google Scholar]
- Guo, Y.; Wang, X.; Wan, L.; Huang, M.; Shen, C.; Zhnag, K.; Yang, Y. Tensor-based angle and array gain-phase error estimation scheme in bistatic MIMO radar. IEEE Access 2019, 7, 47972–47981. [Google Scholar] [CrossRef]
- Sokal, B.; Gomes, P.R.B.; de Almeida, A.L.F.; Haardt, M. Tensor based receiver for joint channel, data, and phase-noise estimation in MIMO-OFDM systems. IEEE J. Sel. Top. Signal Process. 2021, 15, 803–815. [Google Scholar] [CrossRef]
- Kong, L.; Xu, X. Calibration of a polarimetric MIMO array with horn elements for near-field measurement. IEEE Trans. Antenn. Propag. 2020, 68, 4489–4501. [Google Scholar] [CrossRef]
- Kolda, T.G.; Bader, B.W. Tensor decompositions and applications. SIAM Rev. 2009, 51, 455–500. [Google Scholar] [CrossRef]
- Bro, R.; Sidiropoulos, N.; Giannakis, G. A fast least squares algorithm for separating trilinear mixtures. In Proceedings of the International Workshop on Independent Component Analysis and Blind Signal Separation, Aussois, France, 11–15 January 1999; pp. 289–294. [Google Scholar]
- Shi, J.; Wen, F.; Liu, T. Nested MIMO radar: Coarrays, tensor modeling and angle estimation. IEEE Trans Aero. Elec. Syst. 2021, 57, 573–585. [Google Scholar]
- Dai, Z.; Su, W.; Gu, H. A calibration method for linear arrays in the presence of gain-phase errors. IEICE Trans. Fund. Electr. 2020, 103, 2020. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, F.; Shi, J.; Wang, X.; Wang, L. Angle Estimation for MIMO Radar in the Presence of Gain-Phase Errors with One Instrumental Tx/Rx Sensor: A Theoretical and Numerical Study. Remote Sens. 2021, 13, 2964. https://doi.org/10.3390/rs13152964
Wen F, Shi J, Wang X, Wang L. Angle Estimation for MIMO Radar in the Presence of Gain-Phase Errors with One Instrumental Tx/Rx Sensor: A Theoretical and Numerical Study. Remote Sensing. 2021; 13(15):2964. https://doi.org/10.3390/rs13152964
Chicago/Turabian StyleWen, Fangqing, Junpeng Shi, Xinhai Wang, and Lin Wang. 2021. "Angle Estimation for MIMO Radar in the Presence of Gain-Phase Errors with One Instrumental Tx/Rx Sensor: A Theoretical and Numerical Study" Remote Sensing 13, no. 15: 2964. https://doi.org/10.3390/rs13152964
APA StyleWen, F., Shi, J., Wang, X., & Wang, L. (2021). Angle Estimation for MIMO Radar in the Presence of Gain-Phase Errors with One Instrumental Tx/Rx Sensor: A Theoretical and Numerical Study. Remote Sensing, 13(15), 2964. https://doi.org/10.3390/rs13152964