
Design, Modeling, and Validation of Grid-Forming Inverters for Frequency Synchronization and Restoration

 ,
,  , ,
, ,  and
and
Abstract
:
1. Introduction
2. Related Work
- The comprehensive applicability of droop-based control in GFM inverters remains inadequately addressed.
- The analysis of the decentralized control’s performance is lacking, particularly in the context of off-grid systems and varying PQ load demands.
- While many techniques address the connection of inverters to the utility grid, there is a lack of exploration regarding the (re)connection of an inverter to an islanded MG.
- The majority of techniques are designed for inverters operating in (P-Q) control mode, leaving a gap in the understanding of inverters in (V-f) control mode post-(re)connection.
- Certain methods require communication infrastructure, leading to cost implications for the seamless plug-and-play operation of inverters and exposing them to potential cyber-attacks.
3. Methodology
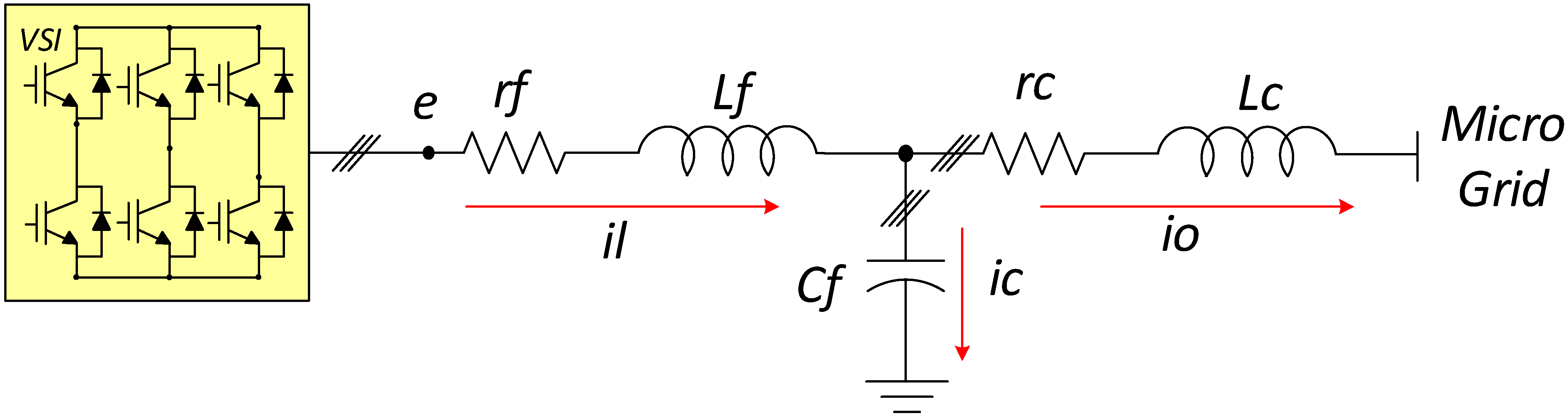
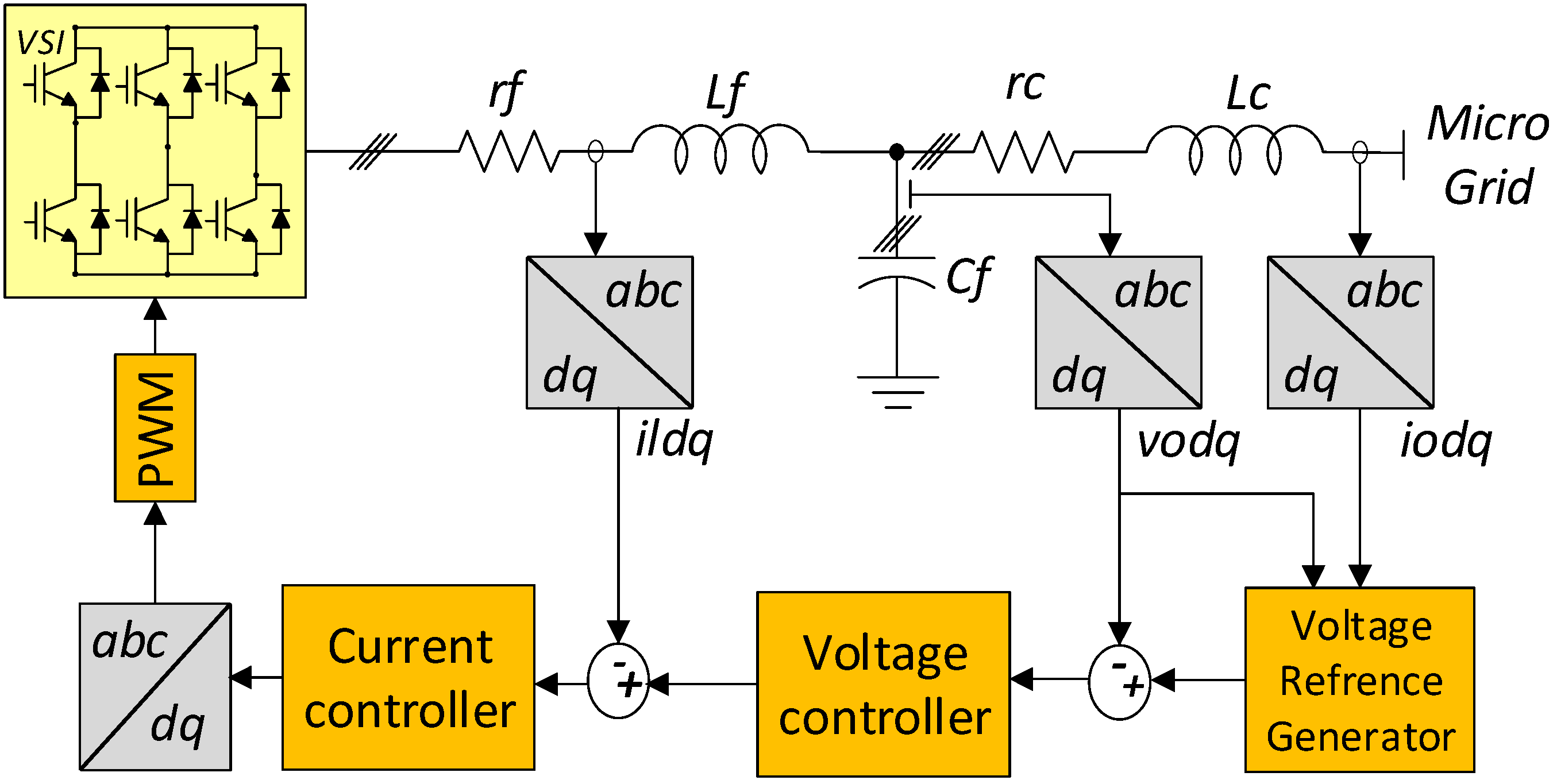
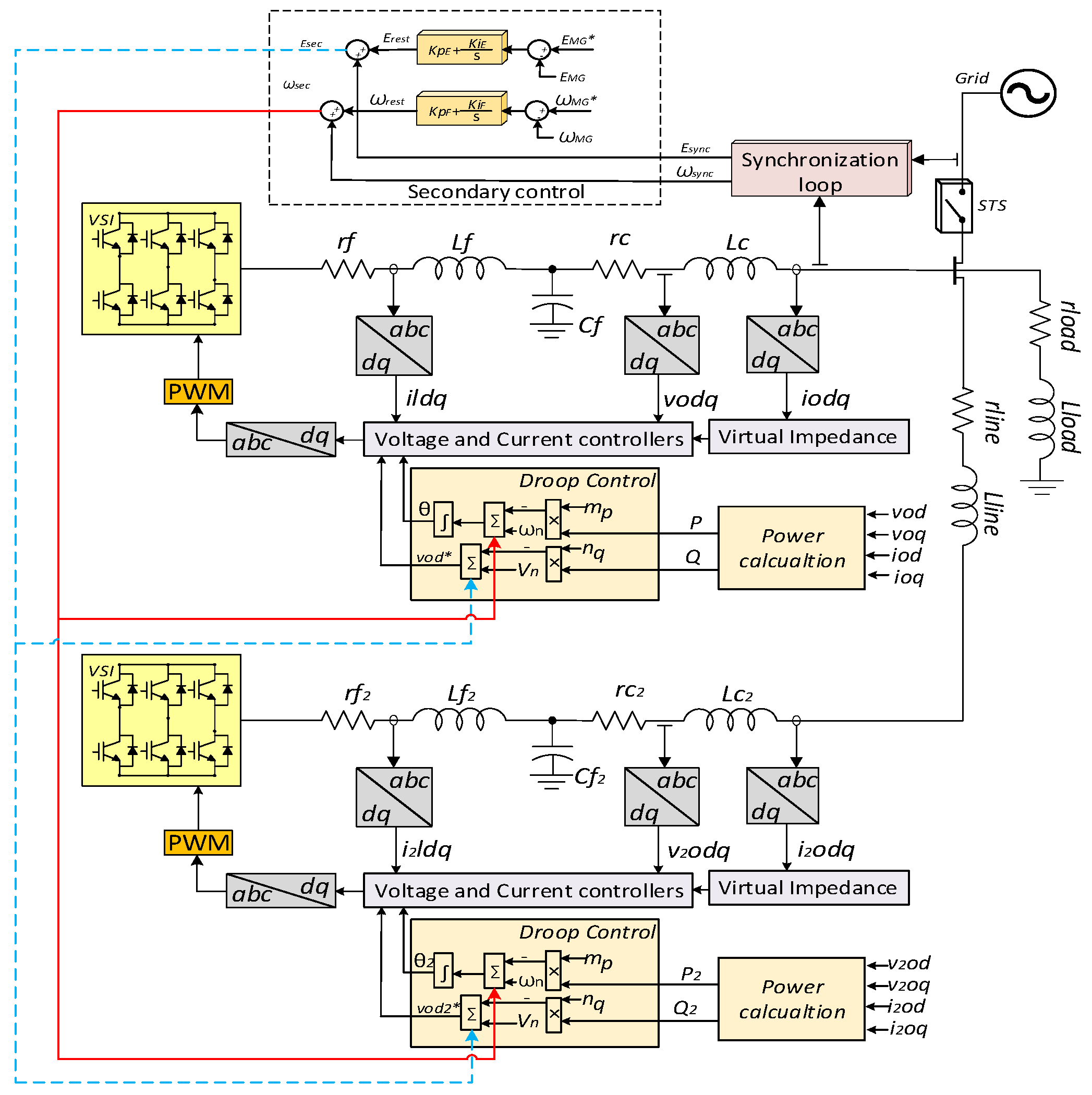
3.1. System Description and Modeling
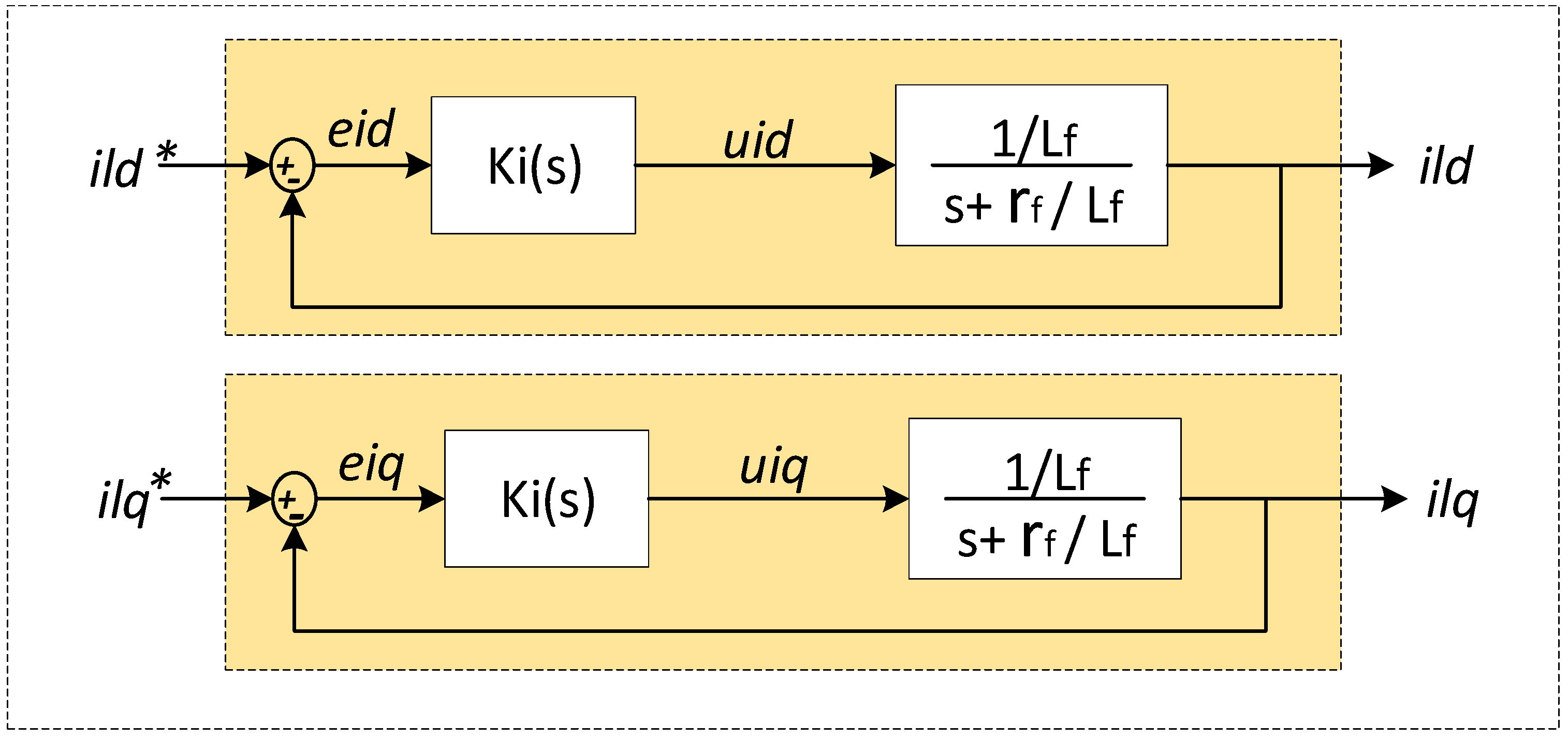
3.1.1. Voltage and Current Loops
3.1.2. Inner Loops Control Design
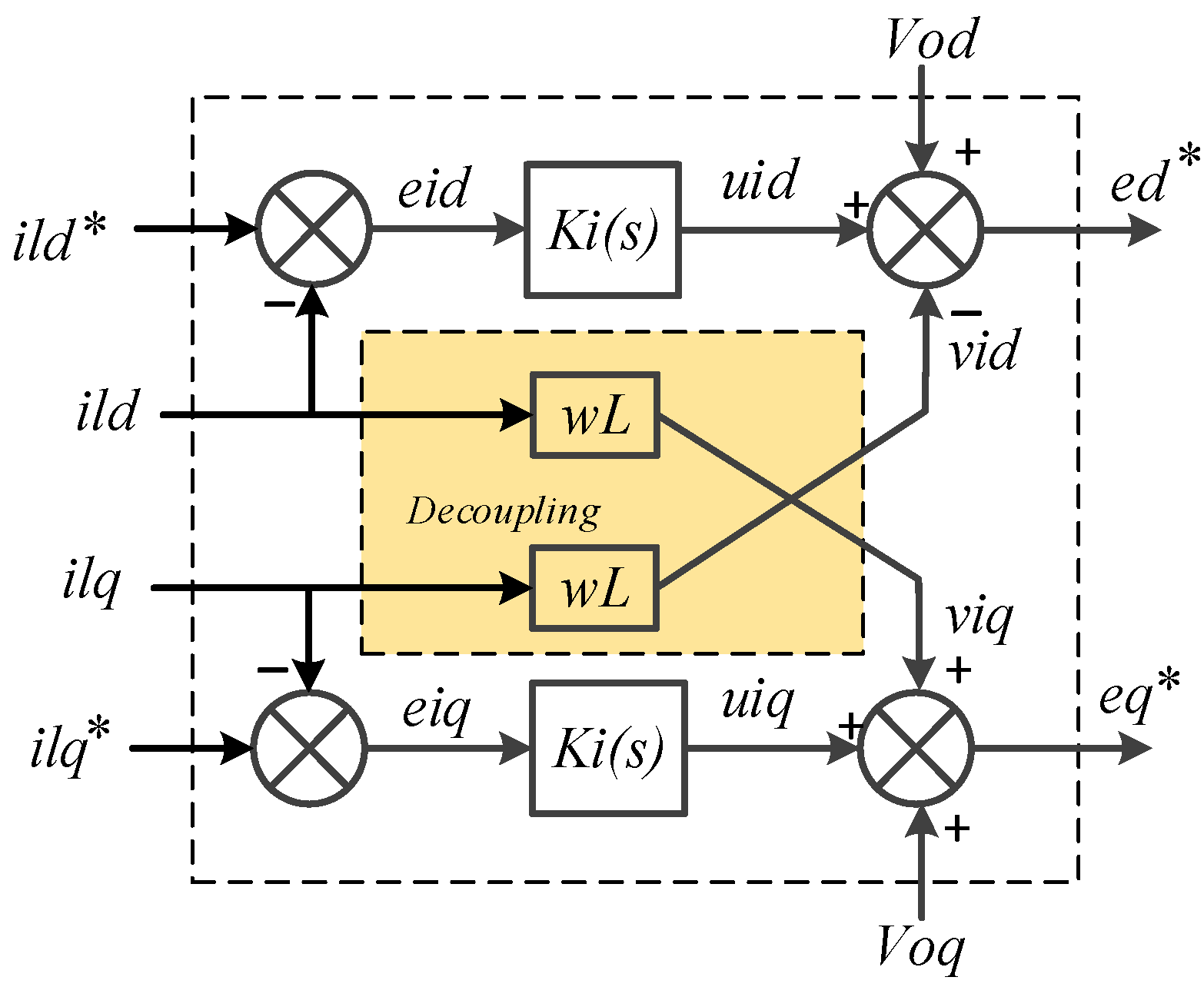
Current Loop Controller Design
- and are the d- and q-axis components of the voltage modulation signals, respectively.
- and are the values of the inductance current for the d- and q-axis components, respectively.
- and are the proportional and integral PI regulator parameters for current control and represents the inductance of the inverter-side filter.
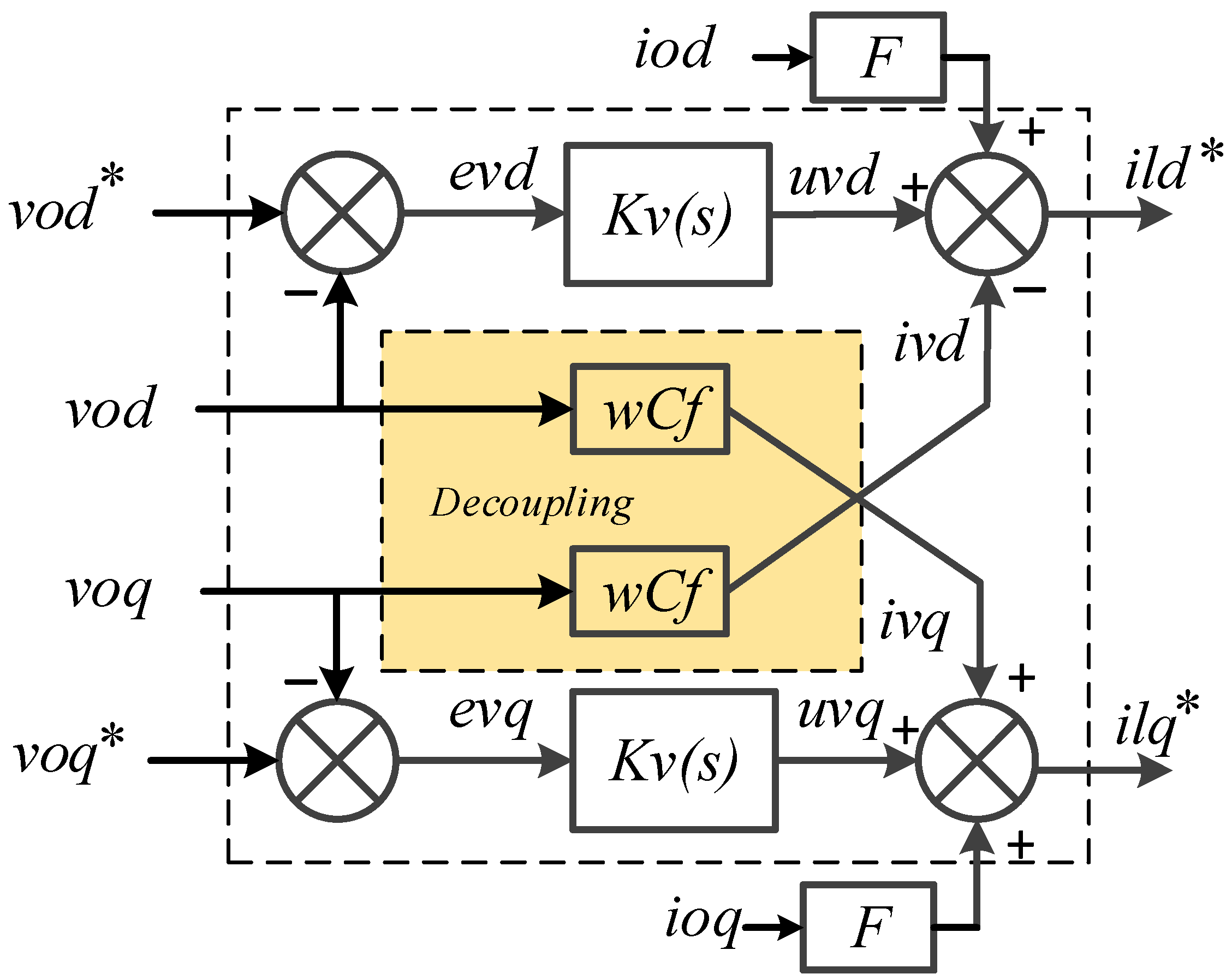
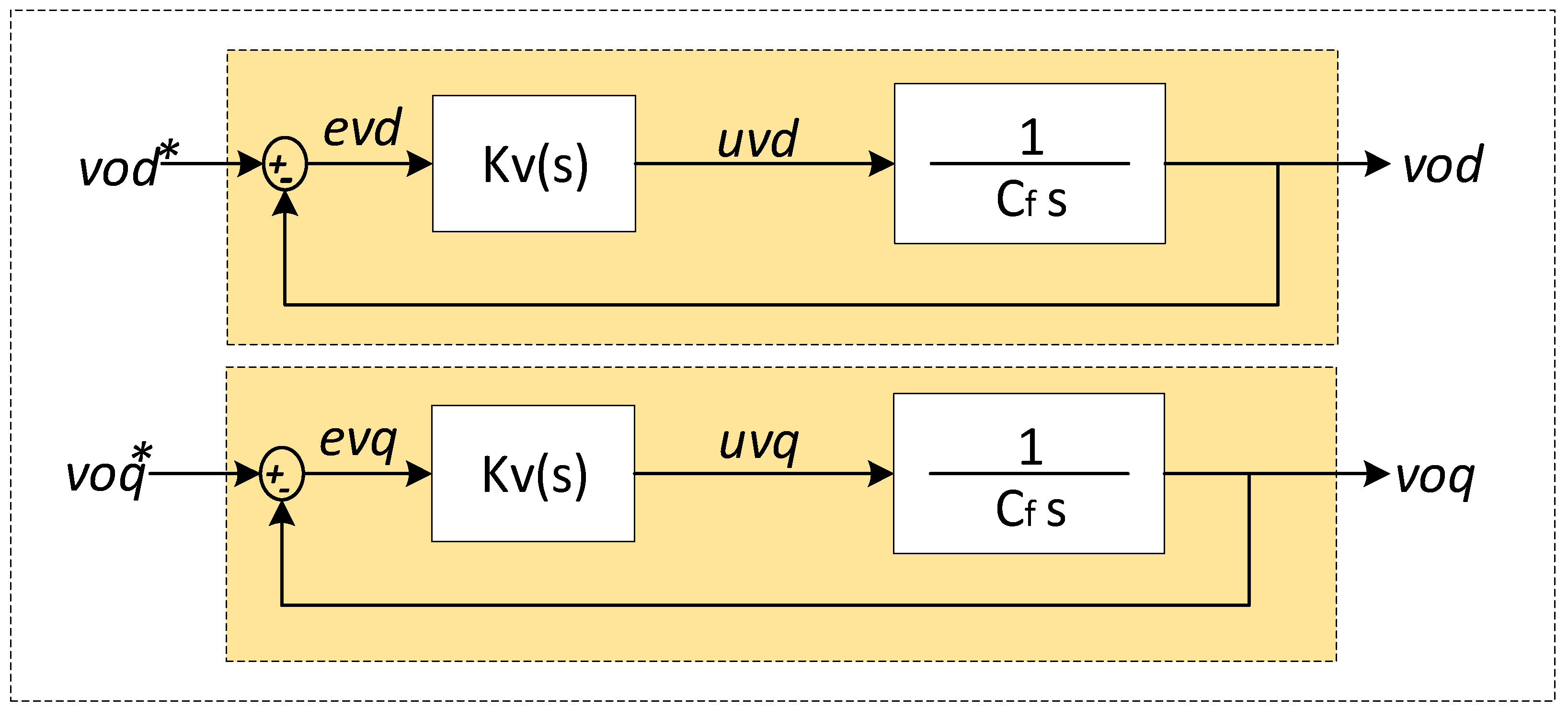
Voltage Loop Controller Design
- and are the d- and q-axis inductance current references, respectively;
- and are the voltage references;
- is the angular frequency, and are the proportional and integral parameters of the PI regulator. For voltage control, represents the capacitance of the filter and is the feedforward current gain. Figure 6 shows the block diagram of the voltage control loop.
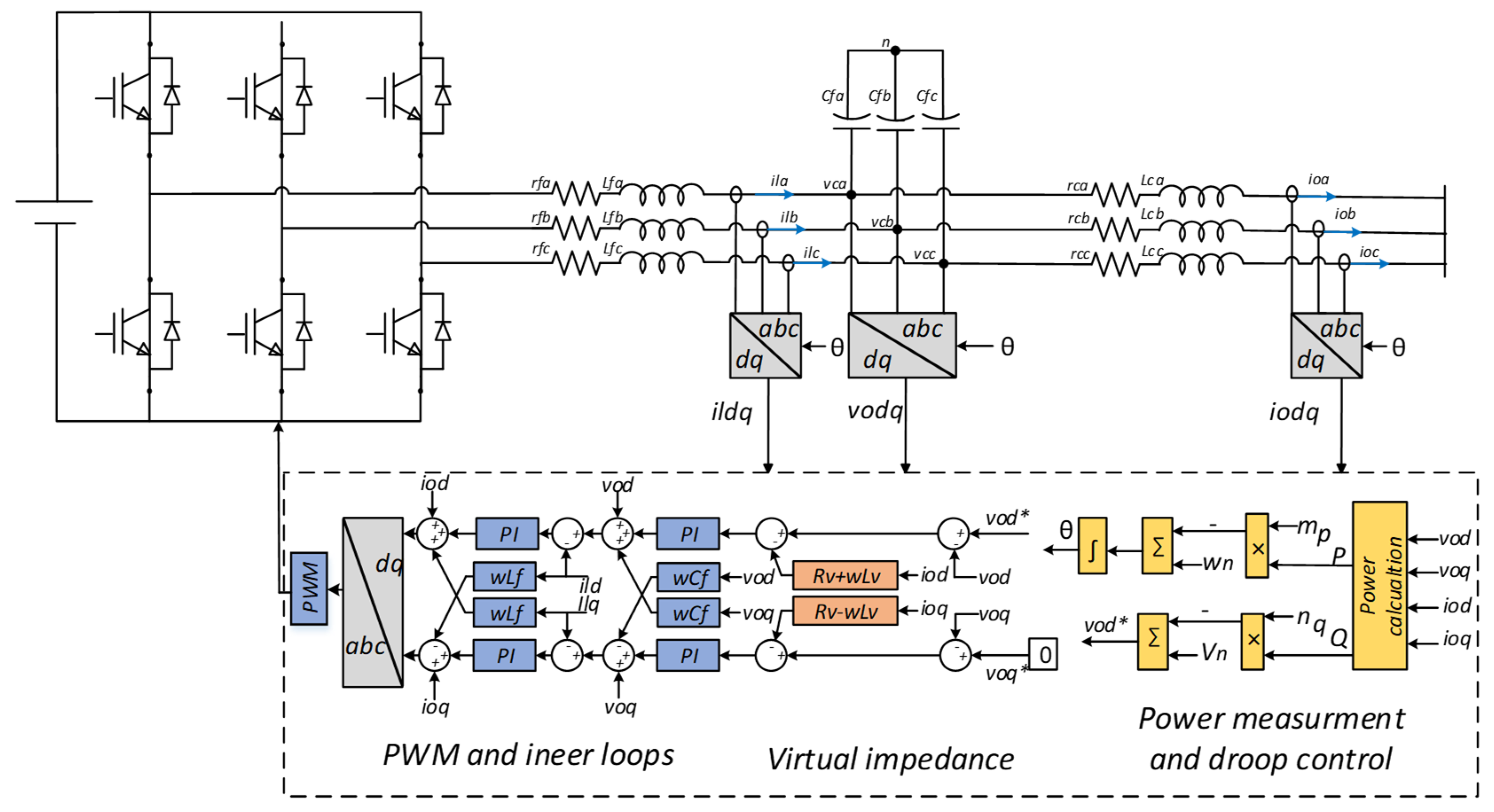
4. Grid-Forming Inverters Frequency Synchronization and Restoration
4.1. Droop Control and Virtual Impedance
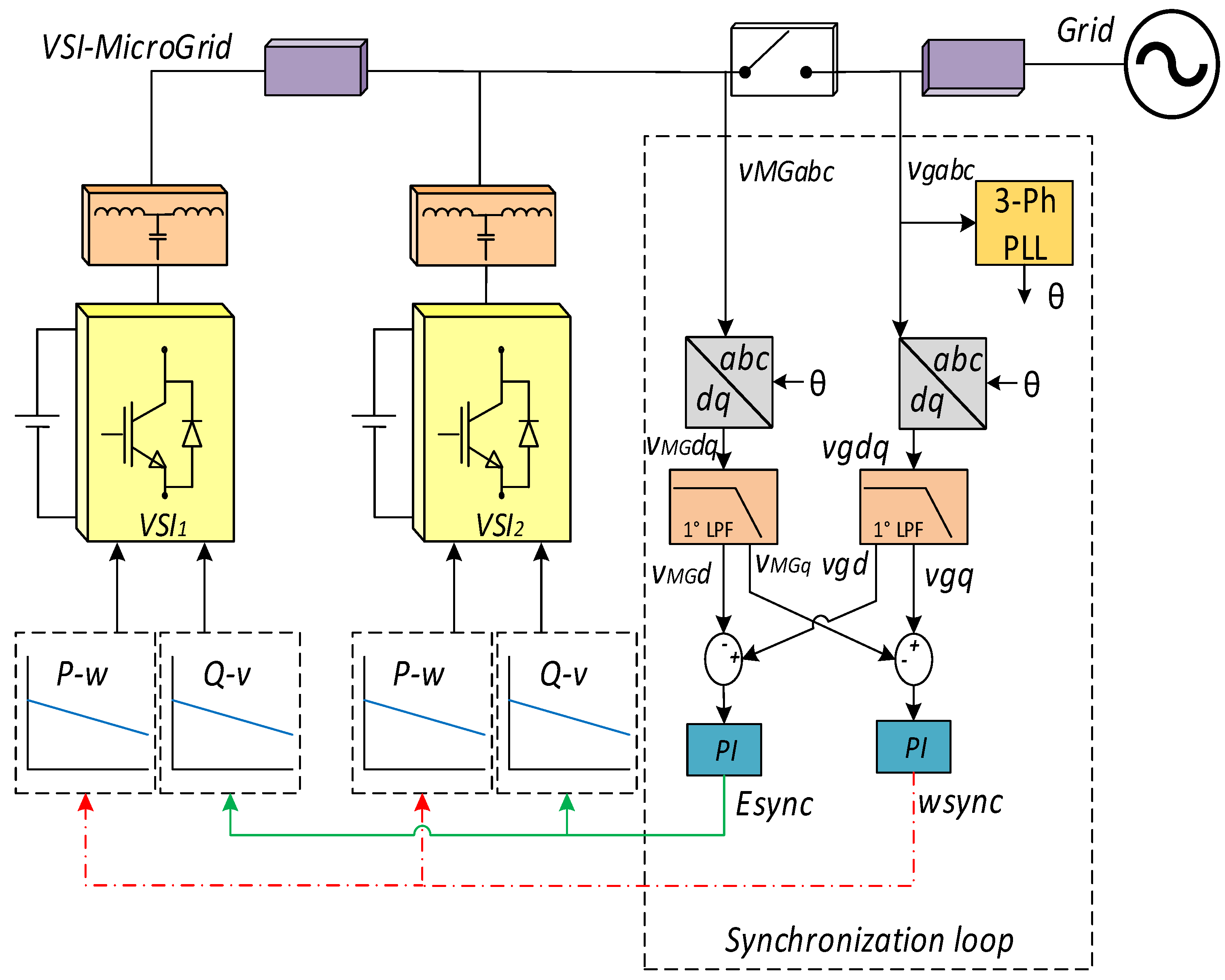
4.2. Proposed Synchronization Loop
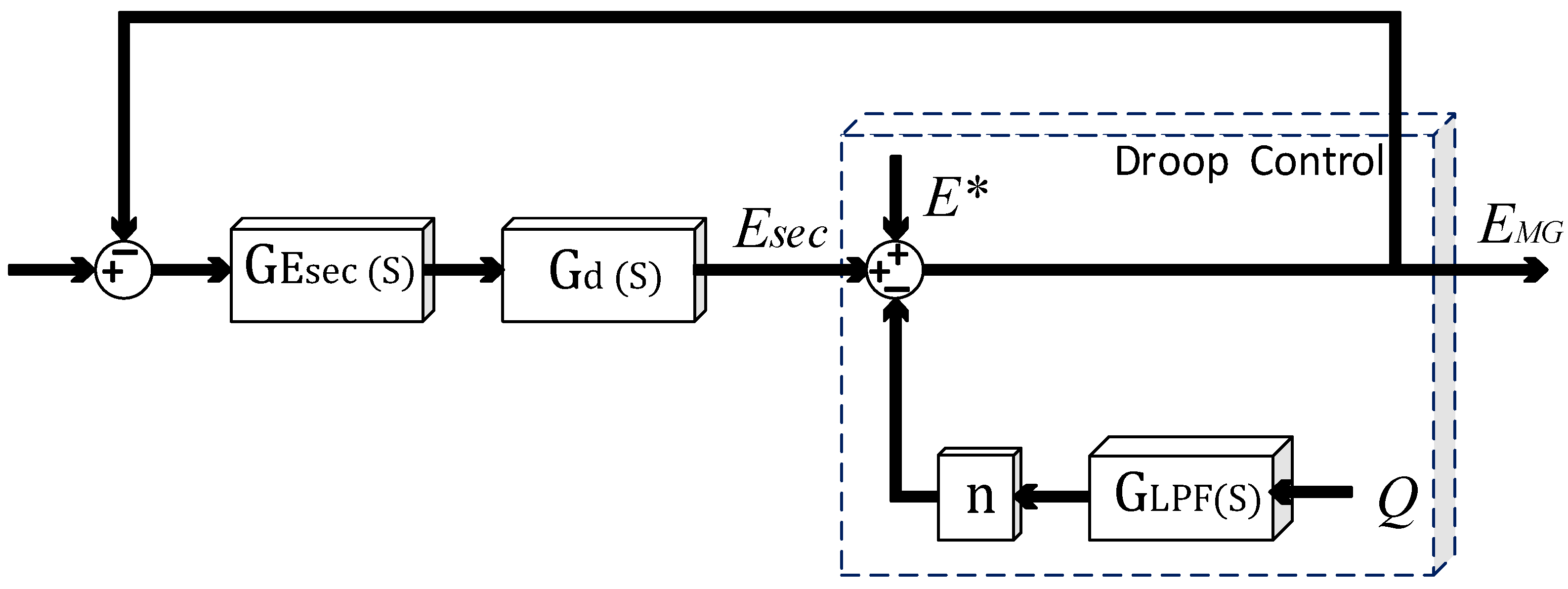
4.3. Frequency and Voltage Restoration
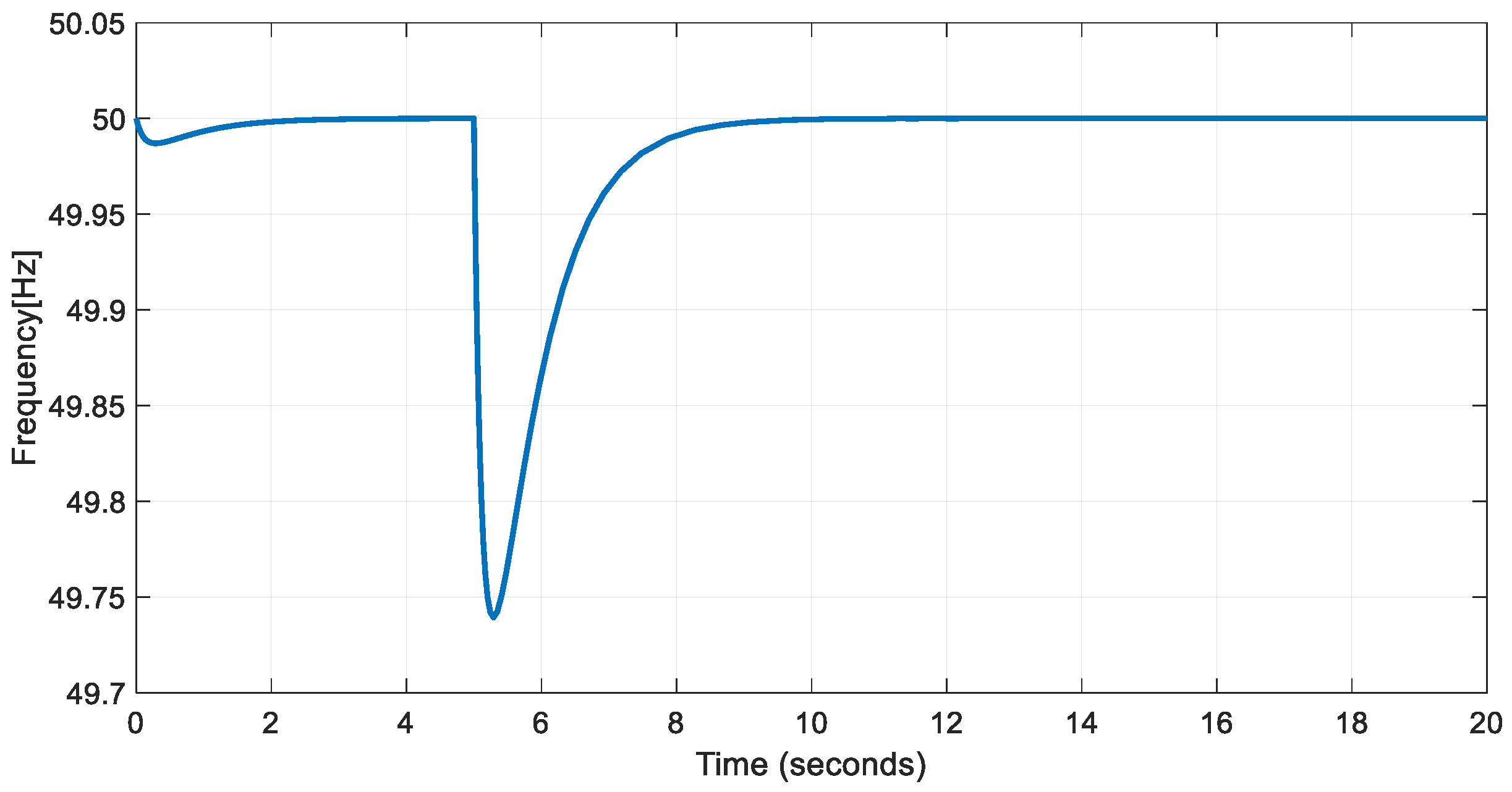
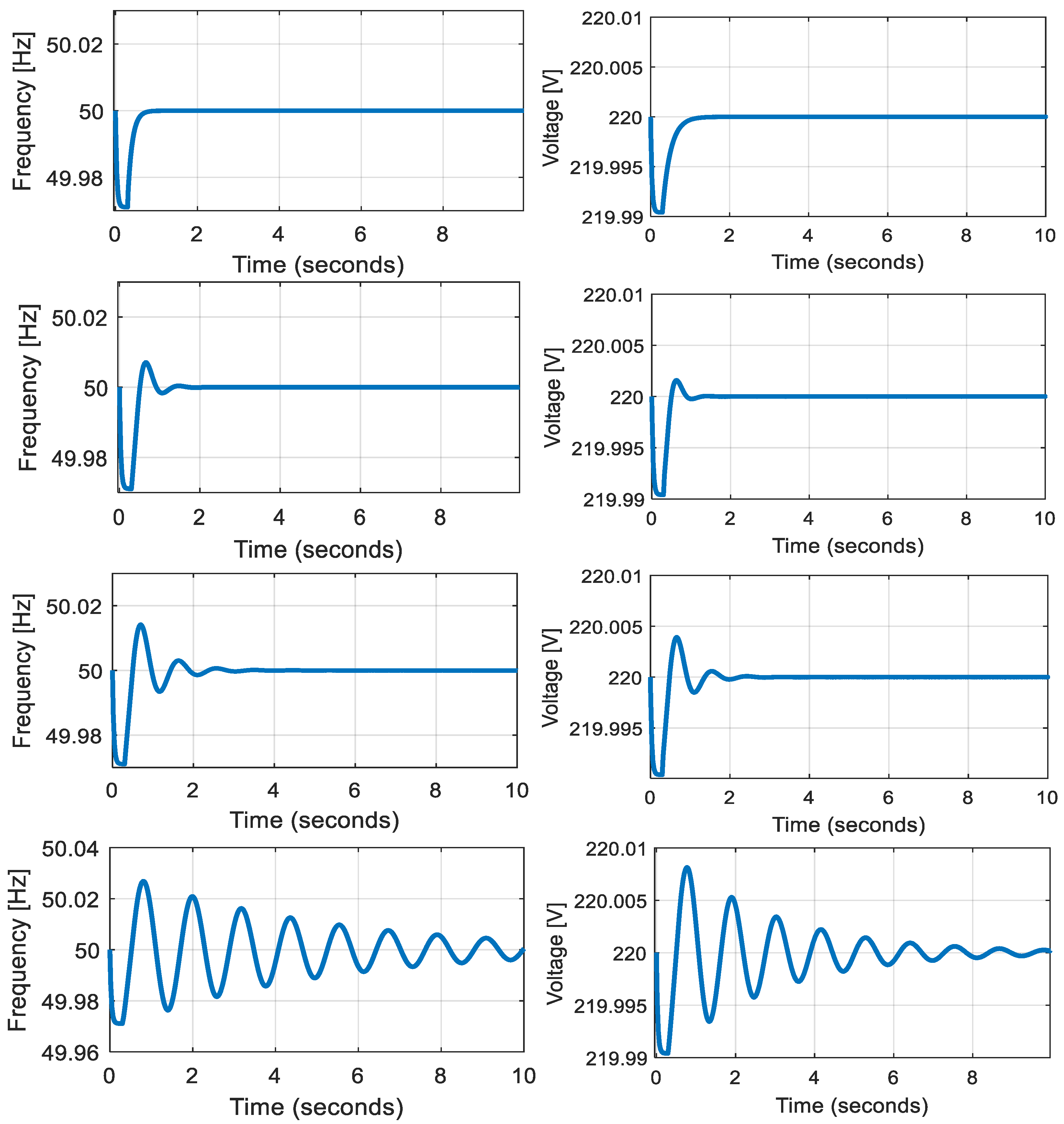
4.3.1. Frequency Restoration
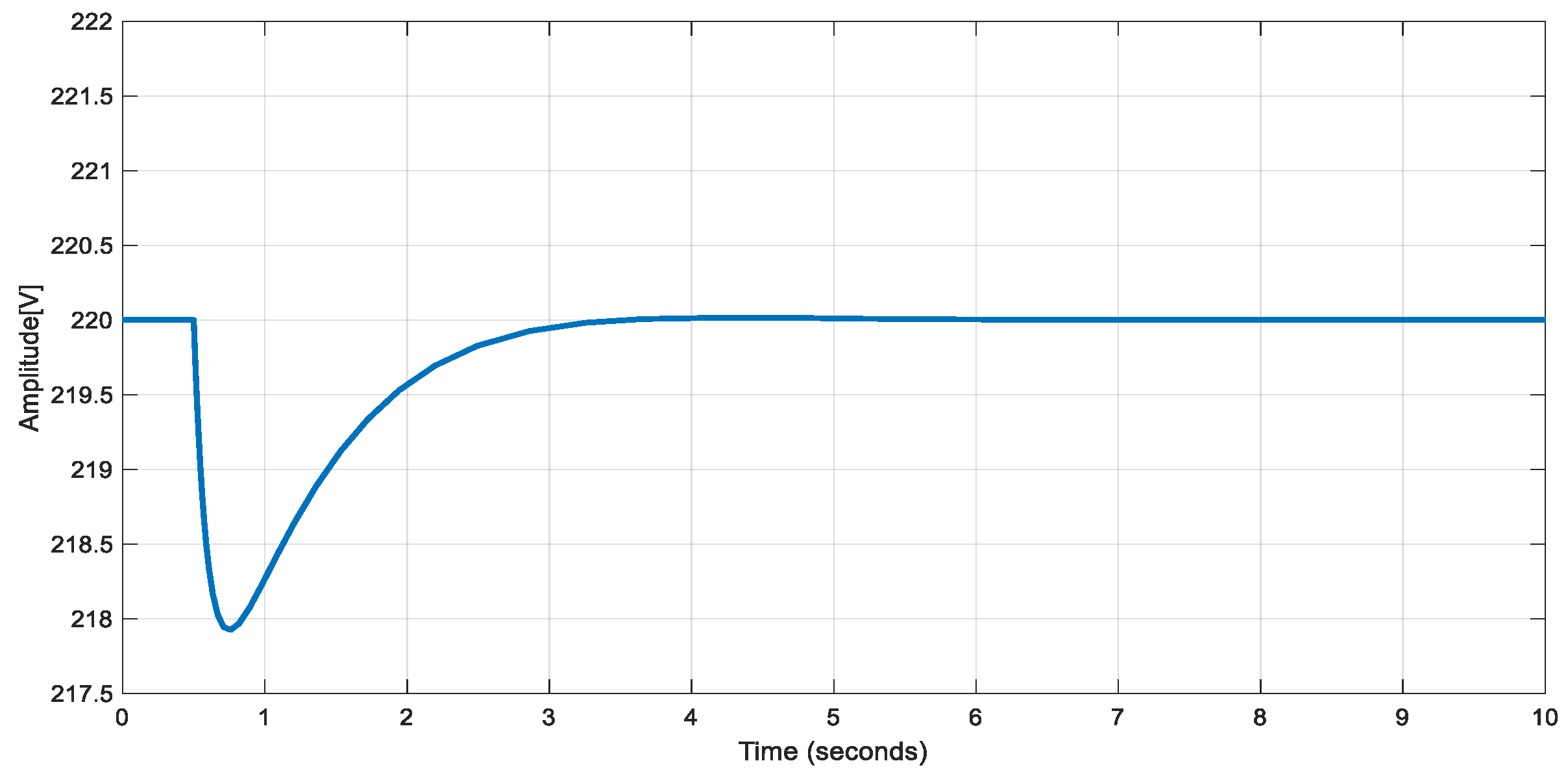
4.3.2. Amplitude Restoration
5. Simulation Results
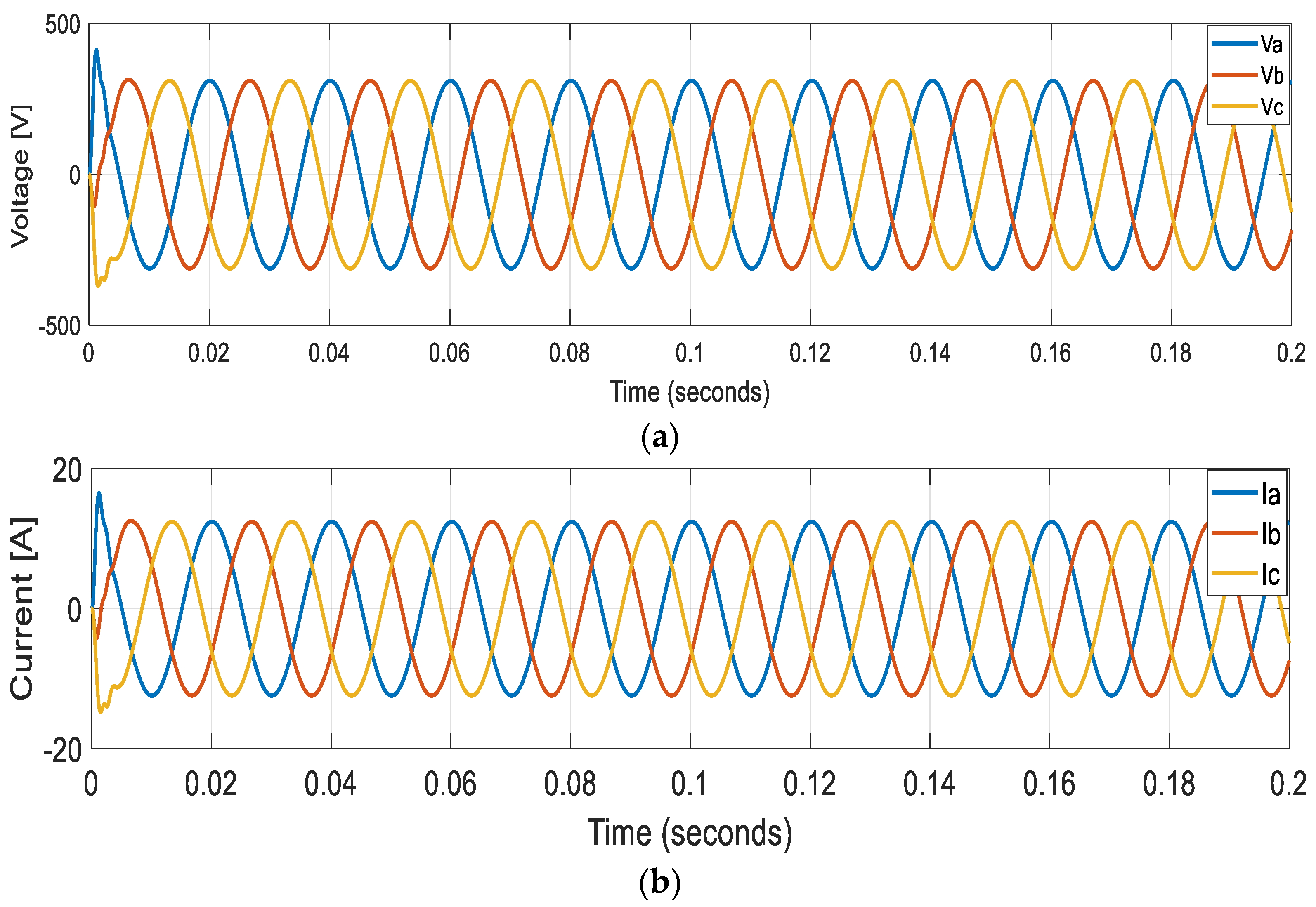
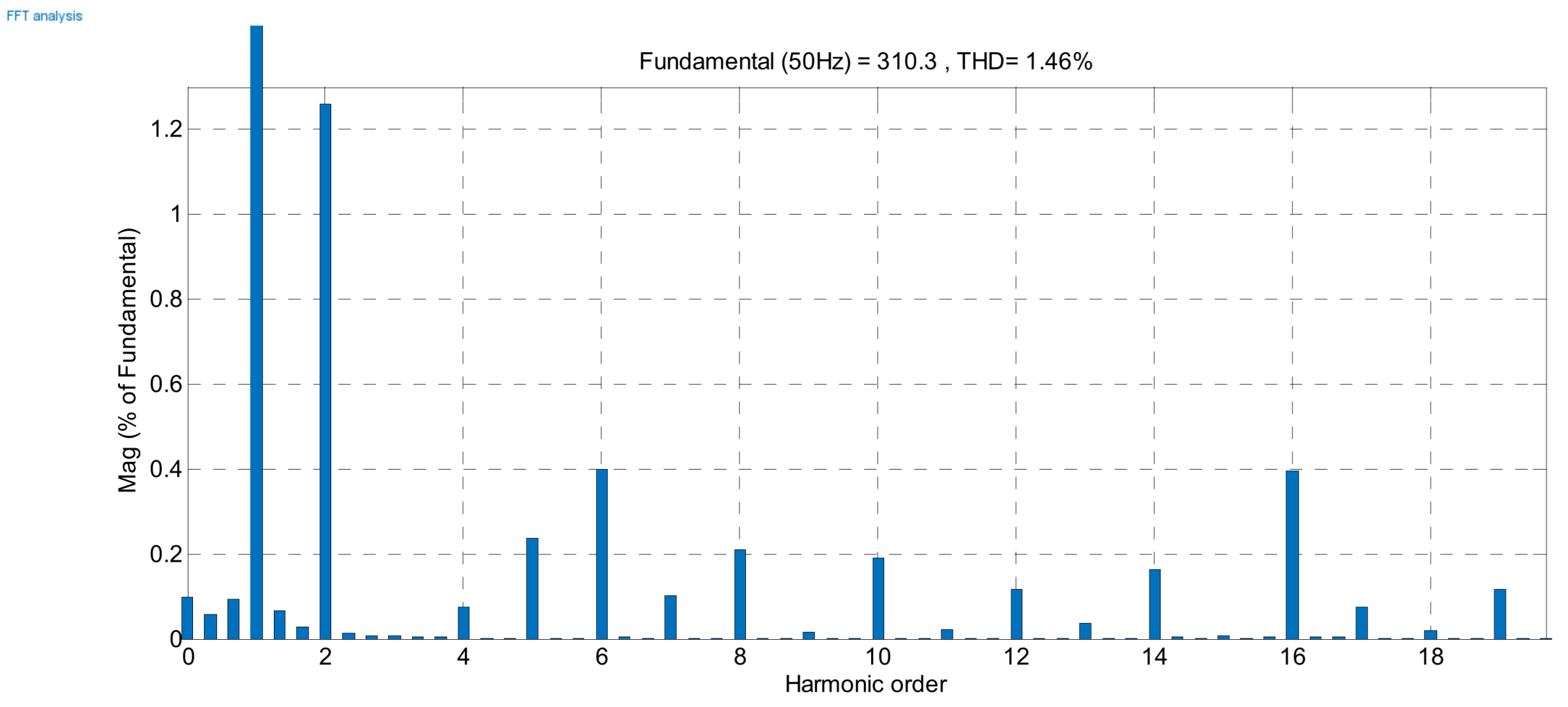
5.1. Voltage and Current Waveforms
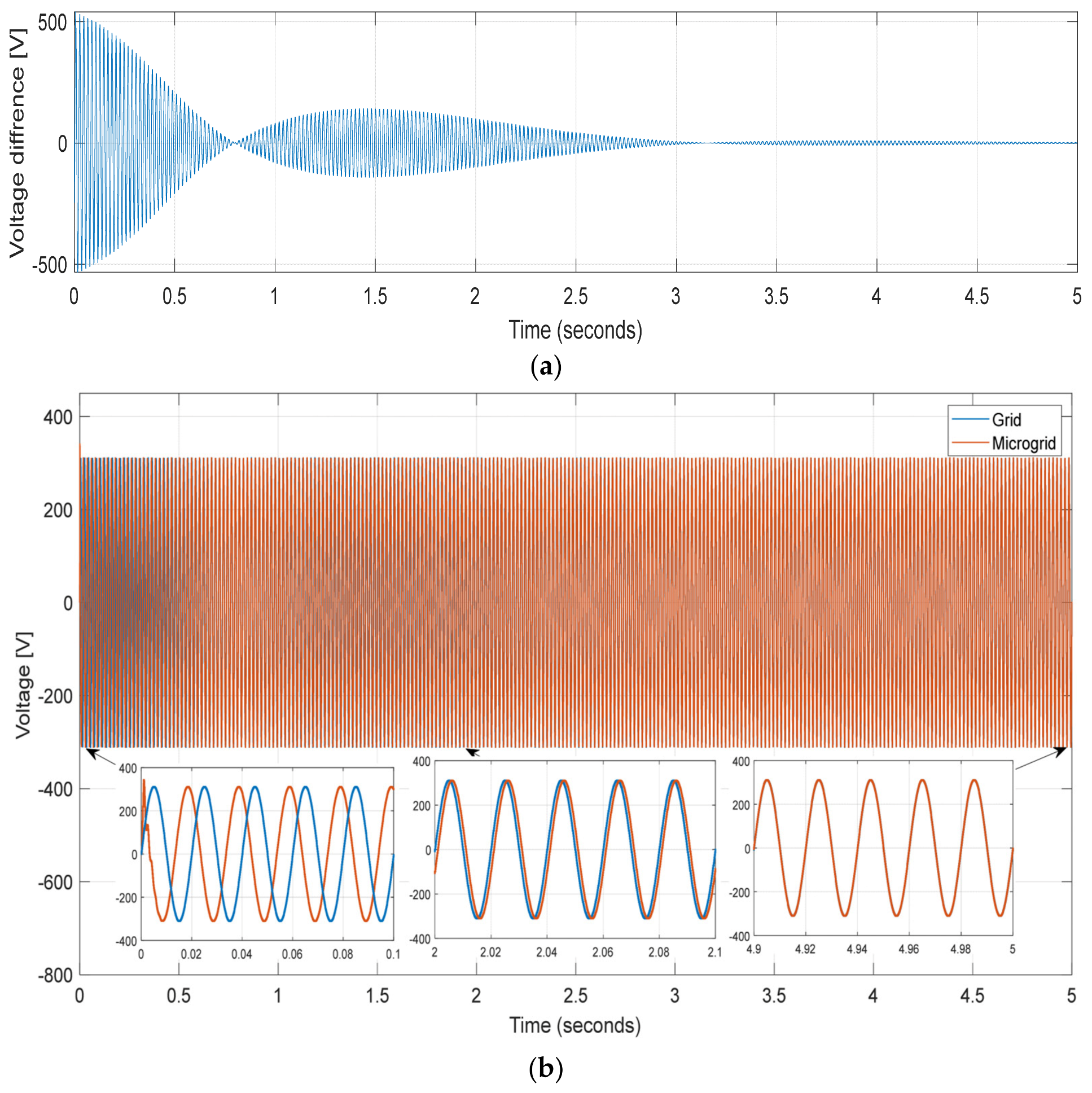
5.2. Inverters Synchronization to the MG
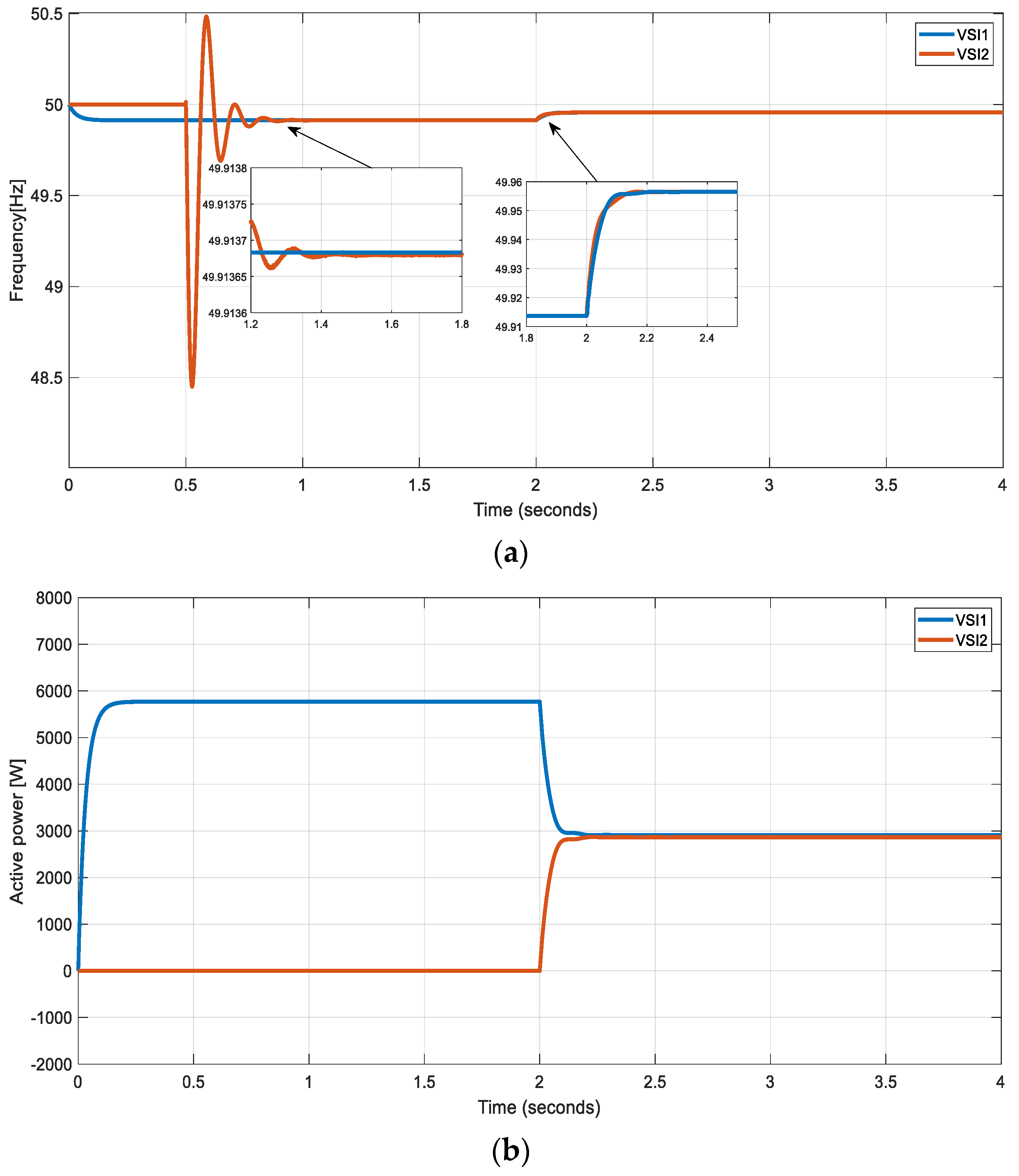
5.3. Freaquency and Voltage Restoration Performance
5.4. Impact of Communication Time Delays
5.5. Synchronization with the Main Grid
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| GFM | Grid-forming |
| MG | Microgrid |
| VSI | Voltage source inverters |
| SG | Synchronous generators |
| DG | Distributed generation |
| PLL | Phase-locked loop |
| THD | Total harmonic distortion |
| PWM | Pulse width modulation |
| PCC | Point of common coupling |
| MGCC | Microgrid central controller |
| UPS | Uninterruptible power supply |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inverter Parameters (10 kVA Rating) | |||
|---|---|---|---|
| Parameter | Value | Parameter | Value |
| fs | 8 kHz | Cf | 50 uF |
| Lf | 1.35 mH | rf | 0.1 Ω |
| Lc | 0.35 mH | rc | 0.03 Ω |
| Line and Load parameters | |||
| rline | 0.1 Ω | rload | 25 Ω |
| Lline | 0.35 mH | Lload | 10−5 mH |
| Primary control parameters | |||
| mp | 9.4 × 10−5 (=0.3% droop) | nq | 1.3 × 10−3 (=2% droop) |
| Wn | 314.16 rad/s | Vn | 311 V |
| Wc | 31.41 rad/s | ||
| Rv | 0.0370 | Lv | 0.0200 |
| Voltage and current Controller parameters | |||
| Voltage controller | Current controller | ||
| Kpv | 0.037 | Kiv | 393 |
| Kpc | 10.5 | Kic | 16 × 103 |
| F | 0.75 | ||
| Secondary control | |||
| KpE | 0.2 | KiE | 0.05 |
| KpF | 0.01 | KiF | 5 |
| τ | 50 ms | ||
References
- Gursoy, M.; Mirafzal, B. Direct vs. Indirect control schemes for grid-forming inverters–unveiling a performance comparison in a microgrid. IEEE Access 2023, 11, 75023–75036. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; De Vicuña, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2010, 58, 158–172. [Google Scholar] [CrossRef]
- Issa, W.; Al-Naemi, F.; Konstantopoulos, G.; Sharkh, S.; Abusara, M. Stability analysis and control of a microgrid against circulating power between parallel inverters. Energy Procedia 2019, 157, 1061–1070. [Google Scholar] [CrossRef]
- Alsiraji, H.A.; Guerrero, J.M. A new hybrid virtual synchronous machine control structure combined with voltage source converters in islanded ac microgrids. Electr. Power Syst. Res. 2021, 193, 106976. [Google Scholar] [CrossRef]
- Bevrani, H.; Ise, T.; Miura, Y. Virtual synchronous generators: A survey and new perspectives. Int. J. Electr. Power Energy Syst. 2014, 54, 244–254. [Google Scholar] [CrossRef]
- Shuai, Z.; Hu, Y.; Peng, Y.; Tu, C.; Shen, Z.J. Dynamic stability analysis of synchronverter-dominated microgrid based on bifurcation theory. IEEE Trans. Ind. Electron. 2017, 64, 7467–7477. [Google Scholar] [CrossRef]
- Wu, H.; Wang, X. Design-oriented transient stability analysis of grid-connected converters with power synchronization control. IEEE Trans. Ind. Electron. 2018, 66, 6473–6482. [Google Scholar] [CrossRef]
- Rathnayake, D.B.; Razzaghi, R.; Bahrani, B. Generalized virtual synchronous generator control design for renewable power systems. IEEE Trans. Sustain. Energy 2022, 13, 1021–1036. [Google Scholar] [CrossRef]
- Gurugubelli, V.; Ghosh, A.; Panda, A.K. Design and implementation of optimized virtual oscillatory controllers for grid-forming inverters. ISA Trans. 2023, 139, 685–712. [Google Scholar] [CrossRef]
- Unruh, P.; Nuschke, M.; Strauß, P.; Welck, F. Overview on grid-forming inverter control methods. Energies 2020, 13, 2589. [Google Scholar] [CrossRef]
- Rathnayake, D.B.; Akrami, M.; Phurailatpam, C.; Me, S.P.; Hadavi, S.; Jayasinghe, G.; Zabihi, S.; Bahrani, B. Grid forming inverter modeling, control, and applications. IEEE Access 2021, 9, 114781–114807. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; Garcia De Vicunagarcia De Vicuna, L.; Castilla, M.; Miret, J. Wireless-Control Strategy for Parallel Operation of Distributed-Generation Inverters. IEEE Trans. Ind. Electron. 2006, 53, 1461–1470. [Google Scholar] [CrossRef]
- Anttila, S.; Döhler, J.S.; Oliveira, J.G.; Boström, C. Grid forming inverters: A review of the state of the art of key elements for microgrid operation. Energies 2022, 15, 5517. [Google Scholar] [CrossRef]
- Geng, S.; Hiskens, I.A. Unified grid-forming/following inverter control. IEEE Open Access J. Power Energy 2022, 9, 489–500. [Google Scholar] [CrossRef]
- Me, S.P.; Zabihi, S.; Blaabjerg, F.; Bahrani, B. Adaptive Virtual Resistance for Postfault Oscillation Damping in Grid-Forming Inverters. IEEE Trans. Power Electron. 2022, 37, 3813–3824. [Google Scholar] [CrossRef]
- Ray, I. Review of impedance-based analysis methods applied to grid-forming inverters in inverter-dominated grids. Energies 2021, 14, 2686. [Google Scholar] [CrossRef]
- Rathnayake, D.B.; Bahrani, B. Multivariable control design for grid-forming inverters with decoupled active and reactive power loops. IEEE Trans. Power Electron. 2022, 38, 1635–1649. [Google Scholar] [CrossRef]
- Huang, X.; Wang, K.; Qiu, J.; Hang, L.; Li, G.; Wang, X. Decentralized control of multi-parallel grid-forming DGs in islanded microgrids for enhanced transient performance. IEEE Access 2019, 7, 17958–17968. [Google Scholar] [CrossRef]
- Salem, Q.; Aljarrah, R.; Karimi, M.; Al-Quraan, A. Grid-Forming Inverter Control for Power Sharing in Microgrids Based on P/f and Q/V Droop Characteristics. Sustainability 2023, 15, 11712. [Google Scholar] [CrossRef]
- Dragičević, T. Model predictive control of power converters for robust and fast operation of AC microgrids. IEEE Trans. Power Electron. 2017, 33, 6304–6317. [Google Scholar] [CrossRef]
- Wang, X.; Li, Y.W.; Blaabjerg, F.; Loh, P.C. Virtual-impedance-based control for voltage-source and current-source converters. IEEE Trans. Power Electron. 2014, 30, 7019–7037. [Google Scholar] [CrossRef]
- Bennia, I.; Daili, Y.; Harrag, A. Hierarchical Control of Paralleled Voltage Source Inverters in Islanded Single Phase Microgrids. In Proceedings of the International Conference in Artificial Intelligence in Renewable Energetic Systems, Tipaza, Algeria, 22–24 November 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 302–313. [Google Scholar]
- Bekker, I.; Hofmann, L.; Mertens, A. Secondary control with grid-forming inverters for an island grid restoration approach without communication. Electr. Power Syst. Res. 2022, 213, 108498. [Google Scholar] [CrossRef]
- Bennia, I.; Harrag, A.; Daili, Y.; Bouzid, A.; Guerrero, J.M. Decentralized secondary control for frequency regulation based on fuzzy logic control in islanded microgrid. Indones. J. Electr. Eng. Comput. Sci. 2023, 29, 85–100. [Google Scholar] [CrossRef]
- Sadeque, F.; Mirafzal, B. Frequency restoration of grid-forming inverters in pulse load and plug-in events. IEEE J. Emerg. Sel. Top. Ind. Electron. 2022, 4, 580–588. [Google Scholar] [CrossRef]
- Aouichak, I.; Jacques, S.; Bissey, S.; Reymond, C.; Besson, T.; Le Bunetel, J.-C. A bidirectional grid-connected DC–AC converter for autonomous and intelligent electricity storage in the residential sector. Energies 2022, 15, 1194. [Google Scholar] [CrossRef]
- Sharma, D.; Sadeque, F.; Mirafzal, B. Synchronization of inverters in grid forming mode. IEEE Access 2022, 10, 41341–41351. [Google Scholar] [CrossRef]
- Litwin, M.; Zieliński, D.; Gopakumar, K. Remote micro-grid synchronization without measurements at the point of common coupling. IEEE Access 2020, 8, 212753–212764. [Google Scholar] [CrossRef]
- Llaria, A.; Curea, O.; Jiménez, J.; Camblong, H. Survey on microgrids: Unplanned islanding and related inverter control techniques. Renew. Energy 2011, 36, 2052–2061. [Google Scholar] [CrossRef]
- Bennia, I.; Daili, Y.; Harrag, A. LCL Filter Design for Low Voltage-Source Inverter. In Proceedings of the International Conference on Artificial Intelligence in Renewable Energetic Systems, Tipasa, Algeria, 22–24 November 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 332–341. [Google Scholar] [CrossRef]
- Loh, P.C.; Holmes, D.G. Analysis of multiloop control strategies for LC/CL/LCL-filtered voltage-source and current-source inverters. IEEE Trans. Ind. Appl. 2005, 41, 644–654. [Google Scholar] [CrossRef]
- Haddadi, A.; Boulet, B.; Yazdani, A.; Joós, G. A μ-based approach to small-signal stability analysis of an interconnected distributed energy resource unit and load. IEEE Trans. Power Deliv. 2014, 30, 1715–1726. [Google Scholar] [CrossRef]
- Issa, W.R. Improved Control Strategies for Droop-Controlled Inverter-Based Microgrid. Master’s Thesis, University of Exeter, Exter, UK, 2015. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, Analysis and Testing of Autonomous Operation of an Inverter-Based Microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Vasquez, J.C.; Guerrero, J.M.; Savaghebi, M.; Eloy-Garcia, J.; Teodorescu, R. Modeling, analysis, and design of stationary-reference-frame droop-controlled parallel three-phase voltage source inverters. IEEE Trans. Ind. Electron. 2012, 60, 1271–1280. [Google Scholar] [CrossRef]
- Erdocia, J.; Urtasun, A.; Marroyo, L. Power Angle–Frequency Droop Control to Enhance Transient Stability of Grid–Forming Inverters under Voltage Dips. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 11, 3751–3764. [Google Scholar] [CrossRef]
- Qoria, T.; Gruson, F.; Colas, F.; Guillaud, X.; Debry, M.-S.; Prevost, T. Tuning of cascaded controllers for robust grid-forming voltage source converter. In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–7. [Google Scholar]
- Khayat, Y.; Shafiee, Q.; Heydari, R.; Naderi, M.; Dragičević, T.; Simpson-Porco, J.W.; Dörfler, F.; Fathi, M.; Blaabjerg, F.; Guerrero, J.M. On the secondary control architectures of AC microgrids: An overview. IEEE Trans. Power Electron. 2019, 35, 6482–6500. [Google Scholar] [CrossRef]




| Controller Type | Load Step | Rise Time (s) | Overshoot Ratio (%) | Settling Time (s) | Steady-State Error |
|---|---|---|---|---|---|
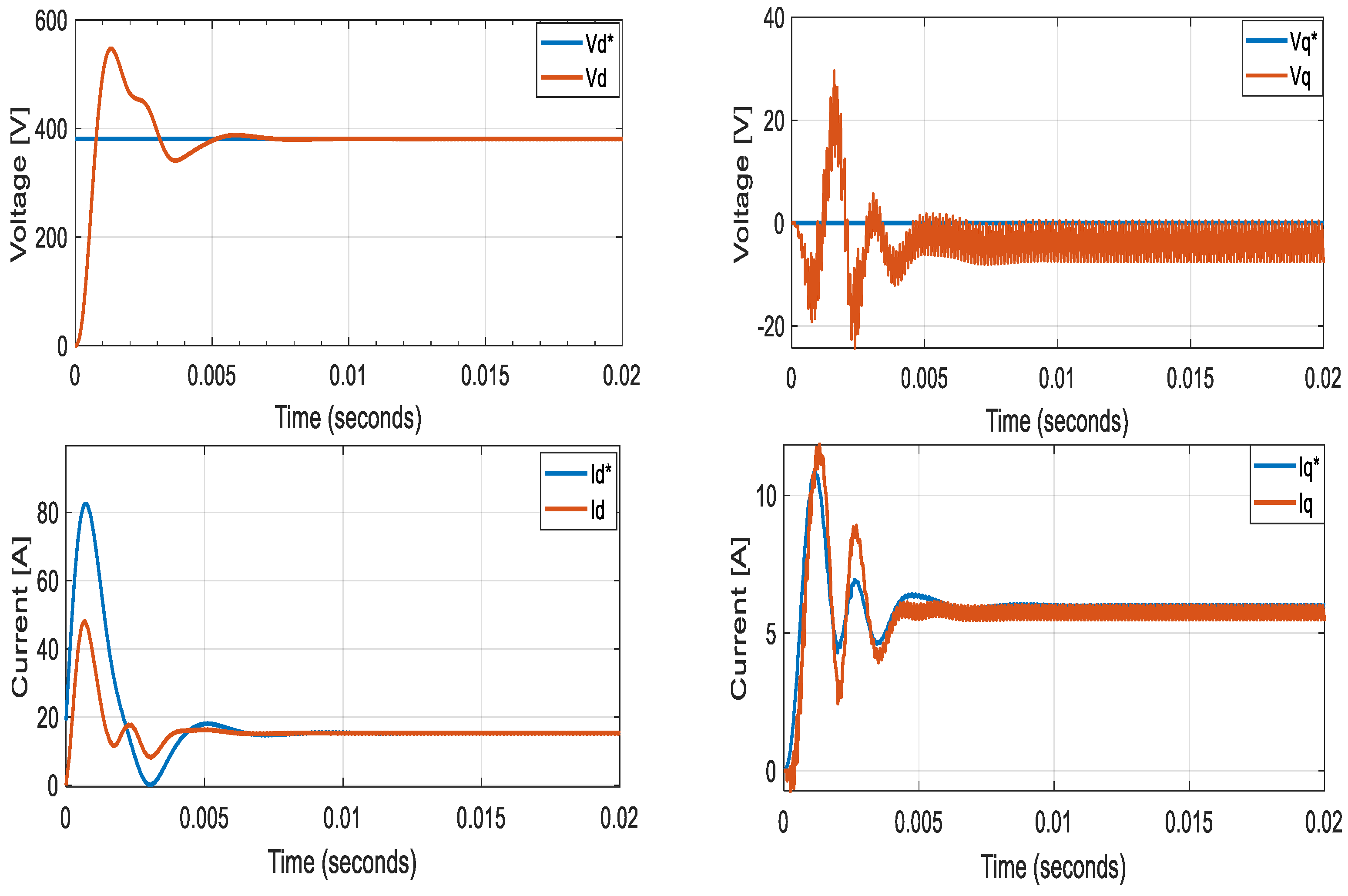
| d-axis voltage controller | 4500 W 500 VAR | 0.0002 | 4.4% | 0.005 | 10−1 |
| q-axis voltage controller | 0.0005 | 0 | 0.004 | 10−1 | |
| d-axis current controller | 0.002 | 23% | 0.006 | 10−5 | |
| q-axis current controller | 0.001 | 10% | 0.006 | 10−2 | |
| Type of disturbance | SC enabled | Load step | Inverter tripping event | Steady-State Error | |
| Restoration Time (s) | 1.5 | 1 | 1 | 10−10 | |
| Synchronization | Undershoot Ratio (%) | Overshoot Ratio (%) | Settling Time (s) | Steady-State Error | |
| Incoming inverter frequency deviation | 3% | 1% | 0.8 | 10−9 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bennia, I.; Elbouchikhi, E.; Harrag, A.; Daili, Y.; Saim, A.; Bouzid, A.E.M.; Kanouni, B. Design, Modeling, and Validation of Grid-Forming Inverters for Frequency Synchronization and Restoration. Energies 2024, 17, 59. https://doi.org/10.3390/en17010059
Bennia I, Elbouchikhi E, Harrag A, Daili Y, Saim A, Bouzid AEM, Kanouni B. Design, Modeling, and Validation of Grid-Forming Inverters for Frequency Synchronization and Restoration. Energies. 2024; 17(1):59. https://doi.org/10.3390/en17010059
Chicago/Turabian StyleBennia, Ilyas, Elhoussin Elbouchikhi, Abdelghani Harrag, Yacine Daili, Abdelhakim Saim, Allal El Moubarek Bouzid, and Badreddine Kanouni. 2024. "Design, Modeling, and Validation of Grid-Forming Inverters for Frequency Synchronization and Restoration" Energies 17, no. 1: 59. https://doi.org/10.3390/en17010059
APA StyleBennia, I., Elbouchikhi, E., Harrag, A., Daili, Y., Saim, A., Bouzid, A. E. M., & Kanouni, B. (2024). Design, Modeling, and Validation of Grid-Forming Inverters for Frequency Synchronization and Restoration. Energies, 17(1), 59. https://doi.org/10.3390/en17010059