Performance Evaluation of Low-Cost Seismic Sensors for Dense Earthquake Early Warning: 2018–2019 Field Testing in Southwest China

Abstract
1. Introduction
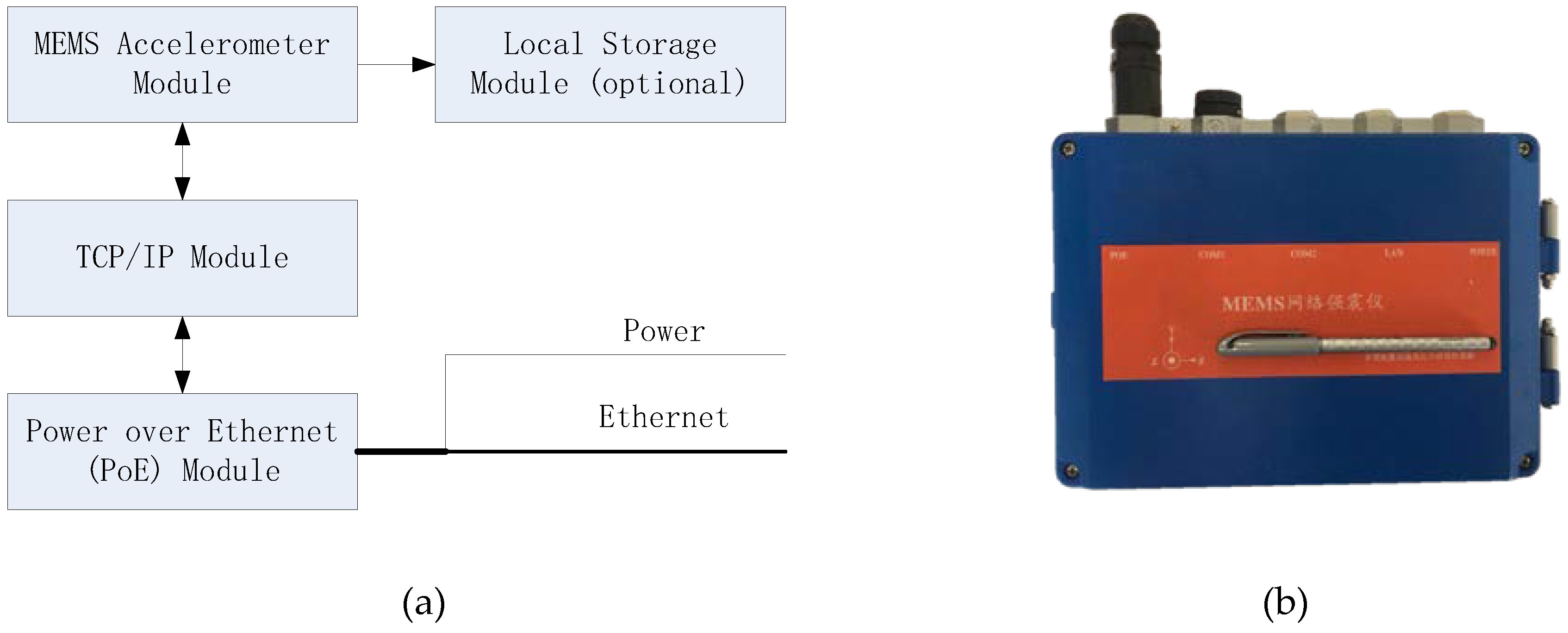
2. Instrument Descriptions
3. Performance Evaluation
3.1. Field Test Stations
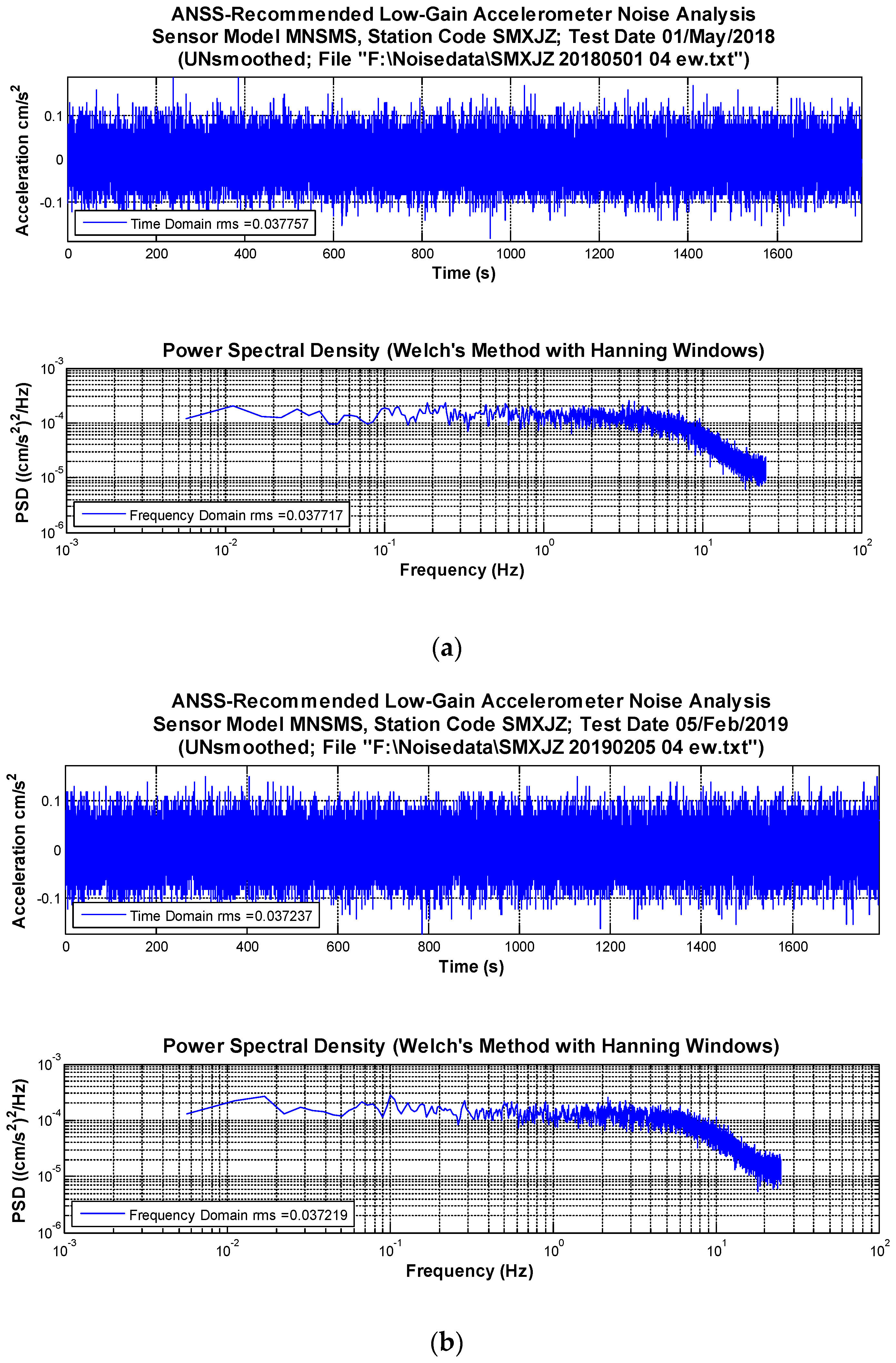
3.2. Noise Analysis
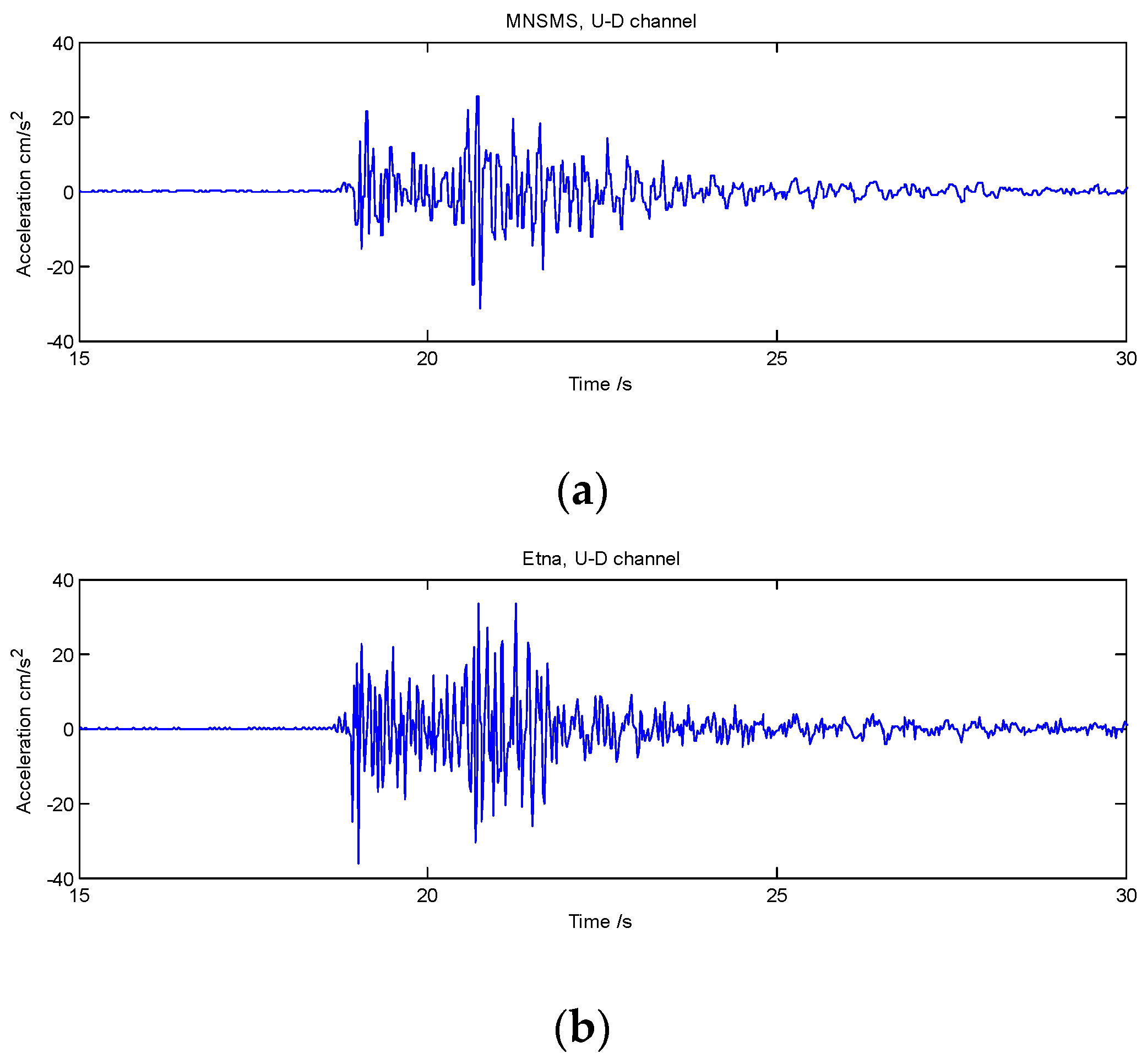
3.3. Earthquake Detections
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Kanamori, H.; Hauksson, E.; Heaton, T. Real-time seismology and earthquake hazard mitigation. Nature 1997, 390, 461–464. [Google Scholar] [CrossRef]
- Allen, R.M.; Kanamori, H. The Potential for Earthquake Early Warning in Southern California. Science 2003, 300, 786–789. [Google Scholar] [CrossRef]
- Espinosa-Aranda, J.M.; Jimenez, A.; Ibarrola, G.; Alcantar, F.; Aguilar, A. Mexico City seismic alert system. Seismol. Res. Lett. 1995, 66, 42–53. [Google Scholar] [CrossRef]
- Nakamura, Y. On the urgent earthquake detection and alarm system (UrEDAS). In Proceedings of the 9th World Conference on Earthquake Engineering, Tokyo, Japan, 2–9 August 1988; pp. 673–678. [Google Scholar]
- Nakamura, Y. Earthquake alarm system for Japan railways. Jpn. Railw. Eng. 1989, 109, 1–7. [Google Scholar]
- Teng, T.L.; Wu, Y.M.; Shin, T.C.; Tsai, Y.B.; Lee, W.H.K. One minute after: Strong-motion map, effective epicenter, and effective magnitude. Bull. Seism. Soc. Am. 1997, 87, 1209–1219. [Google Scholar]
- Wu, Y.M.; Shin, T.C.; Tsai, Y.B. Quick and reliable determination of magnitude for seismic early warning. Bull. Seism. Soc. Am. 1998, 88, 1254–1259. [Google Scholar]
- Wen, K.L.; Hsu, C.C.; Huang, J.Y.; Lin, C.M. Station Correction of EEW System in Ilan, Taiwan; AGU Fall Meeting 2015; Abstract Id. S33B-2781; American Geophysical Union: Washington, DC, USA, 2015. [Google Scholar]
- Chen, D.Y.; Hsiao, N.C.; Wu, Y.M. The Earthworm-based earthquake alarm reporting system in Taiwan. Bull. Seismol. Soc. Am. 2015, 105, 568–579. [Google Scholar] [CrossRef]
- Allen, R.M.; Brown, H.; Hellweg, M.; Khainovski, O.; Lombard, P.; Neuhauser, D. Real-time earthquake detection and hazard assessment by ElarmS across California. Geophys. Res. Lett. 2009, 36, L00B08. [Google Scholar] [CrossRef]
- Böse, M.; Hauksson, E.; Solanki, K.; Kanamori, H.; Heaton, T.H. Real-time testing of the on-site warning algorithm in southern California and its performance during the July 29, 2008 Mw 5.4 Chino Hills earthquake. Geophys. Res. Lett. 2009, 36, 441–451. [Google Scholar] [CrossRef]
- Zollo, A.; Iannaccone, G.; Lancieri, M.; Convertito, V.; Emolo, A.; Festa, G.; Gallovic, F.; Vassallo, M.; Martino, C.; Satriano, C.; et al. Earthquake early warning system in southern Italy: Methodologies and performance evaluation. Geophys. Res. Lett. 2009, 36, L00B07. [Google Scholar] [CrossRef]
- Petit, N.R.; Puyané, Y.C.; Salvador, J.A.J.; Suriñach, X.G.; Vidal, T.S. Development of an earthquake early warning system based on earthworm: Application to Southwest Iberia. Bull. Seismol. Soc. Am. 2016, 106, 1–12. [Google Scholar] [CrossRef][Green Version]
- Kumar, A.; Mittal, H.; Sachdeva, R. Indian strong motion instrumentation network. Seismol. Res. Lett. 2012, 83, 59–66. [Google Scholar] [CrossRef]
- Jin, X.; Wei, Y.; Li, J.; Zhang, H.; Ma, Q.; Kang, L. Progress of the earthquake early warning system in Fujian, China. Earthq. Sci. 2013, 26, 3–14. [Google Scholar] [CrossRef]
- Zhang, H.C.; Jin, X.; Wei, Y.X.; Li, J.; Kang, L.C.; Wang, S.C.; Huang, L.Z.; Yu, P.Q. An earthquake early warning system in Fujian, China. Bull. Seismol. Soc. Am. 2016, 106, 755–765. [Google Scholar] [CrossRef]
- Holland, A. Earthquake data recorded by the MEMS accelerometer. Seismol. Res. Lett. 2003, 74, 20–26. [Google Scholar] [CrossRef]
- ANSS Working Group on Instrumentation, Siting, Installation, and Site Metadata of the Advanced National Seismic System Technical Integration Committee. Instrumentation Guidelines for the Advanced National Seismic System. US Geol. Surv. 2008, 41, 1–52. [Google Scholar]
- Egorov, I.V.; Shabalina, A.S.; Agafonov, V.M. Design and self-noise of MET closed-loop seismic accelerometers. IEEE Sens. J. 2017, 17, 2008–2014. [Google Scholar] [CrossRef]
- Neeshpapa, A.; Antonov, A.; Agafonov, V. A low-noise DC seismic accelerometer based on a combination of MET/MEMS sensors. Sensors 2015, 15, 365–381. [Google Scholar] [CrossRef]
- D’Alessandro, A.; D’Anna, G. Suitability of low-cost three-axis mems accelerometers in strong-motion seismology: Tests on the lis331dlh (iphone) accelerometer. Bull. Seismol. Soc. Am. 2013, 103, 2906–2913. [Google Scholar] [CrossRef]
- Evans, J.R.; Allen, R.M.; Chung, A.I.; Cochran, E.S.; Guy, R.; Hellweg, M.; Lawrence, J.F. Performance of several low-cost accelerometers. Seismol. Res. Lett. 2014, 85, 147–158. [Google Scholar] [CrossRef]
- Pierleoni, P.; Marzorati, S.; Ladina, C.; Raggiunto, S.; Belli, A.; Palma, L.; Cattaneo, M.; Valenti, S. Performance Evaluation of a Low-Cost Sensing Unit for Seismic Applications: Field Testing During Seismic Events of 2016-2017 in Central Italy. IEEE Sens. J. 2018, 18, 6644–6658. [Google Scholar] [CrossRef]
- Fleming, K.; Picozzi, M.; Milkereit, C.; Kühnlenz, F.; Lichtblau, B.; Fischer, J.; Zulfikar, C.; Özel, O. The SAFER and EDIM working groups. The self-organizing seismic early warning information network (SOSEWIN). Seismol. Res. Lett. 2009, 80, 755–771. [Google Scholar] [CrossRef]
- Lawrence, J.F.; Cochran, E.S.; Chung, A.; Kaiser, A.; Christensen, C.M.; Allen, R.; Baker, J.W.; Fry, B.; Heaton, T.; Kilb, D.; et al. Rapid earthquake characterization using MEMS accelerometers and volunteer hosts following the M 7.2 Darfield, New Zealand, earthquake. Bull. Seismol. Soc. Am. 2014, 104, 184–192. [Google Scholar] [CrossRef][Green Version]
- Wu, Y.M.; Mittal, H.; Huang, T.C.; Yang, B.M.; Jan, J.C.; Chen, S.K. Performance of a Low-Cost Earthquake Early Warning System (P-Alert) and Shake Map Production during the 2018 Mw 6.4 Hualien, Taiwan, Earthquake. Seismol. Res. Lett. 2019, 90, 19–29. [Google Scholar] [CrossRef]
- Peng, C.; Chen, Y.; Chen, Q.; Yang, J.; Wang, H.; Zhu, X.; Xu, Z.; Zheng, Y. A new type of tri-axial accelerometers with high dynamic range mems for earthquake early warning. Comput. Geosci. 2017, 100, 179–187. [Google Scholar] [CrossRef]
- Nof, R.N.; Chung, A.I.; Rademacher, H.; Allen, R.M. Integrating Low-Cost MEMS Accelerometer Mini-Arrays (MAMA) in Earthquake Early Warning Systems; AGU Fall Meeting 2016; Abstract Id. S23A-2738; American Geophysical Union: Washington, DC, USA, 2016. [Google Scholar]
- Wu, Y.M.; Liang, W.T.; Mittal, H.; Chao, W.A.; Lin, C.H.; Huang, B.S.; Lin, C.M. Performance of a Low-Cost Earthquake Early Warning System (P-Alert) during the 2016 ML 6.4 Meinong (Taiwan) Earthquake. Seismol. Res. Lett. 2016, 87, 1050–1059. [Google Scholar] [CrossRef]
- McNamara, D.E. Ambient noise levels in the continental united states. Bull. Seismol. Soc. Am. 2004, 94, 1517–1527. [Google Scholar] [CrossRef]
- Peterson, J. Observation and Modeling of Background Seismic Noise. US Geol. Surv. Open File Rept. 1993, 93–95. [Google Scholar]
- Wang, Y.; Xu, H.; Zhang, W.; Tao, G. Observational results of high precision absolute gravity in central and western China in 1996. Chin. J. Geophys. 1998, 41, 818–825. (In Chinese) [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Measuring Range | ± 2 | g (gravity acceleration) |
| Sampling Rate | 50 | Hz |
| Bandwidth | DC to 25 | Hz |
| Dynamic Range | >84 | dB |
| Useful Resolution | >14 | bits |
| Nonlinear Relative Error | <1 | % |
| Sensitivity Relative Error | <5 | % |
| Power Consumption | <1.2 | Watt |
| No. | Station Code | Latitude | Longitude | Field Type | Environment | Direction | Network |
|---|---|---|---|---|---|---|---|
| 1 | SMTWX | 28.81 | 102.28 | on the ground | Indoor | x-East y-North z-Up | 3G/4G mobile networks (VPN) |
| 2 | SMFYX | 26.50 | 102.12 | ||||
| 3 | SMXJZ | 26.83 | 102.74 | ||||
| 4 | SMCLX | 29.14 | 102.34 | ||||
| 5 | SMMYX | 26.89 | 102.11 | ||||
| 6 | SMPGX | 27.38 | 102.54 | ||||
| 7 | SMBTX | 27.71 | 102.81 | ||||
| 8 | SMHGZ | 26.54 | 101.93 | ||||
| 9 | SMZSZ | 28.59 | 102.50 | ||||
| 10 | SMMNX | 28.55 | 102.16 |
| No. | Station Code | Testing Time: May 2018 | Testing Time: February 2019 | ||||
|---|---|---|---|---|---|---|---|
| RMS/cm/s2 | RMS/cm/s2 | ||||||
| E-W | N-S | U-D | E-W | N-S | U-D | ||
| 1 | SMBTX | 0.037 | 0.037 | 0.055 | 0.036 | 0.036 | 0.054 |
| 2 | SMCLX | 0.041 | 0.041 | 0.055 | 0.039 | 0.038 | 0.054 |
| 3 | SMFYX | 0.039 | 0.038 | 0.058 | 0.038 | 0.038 | 0.058 |
| 4 | SMHGZ | 0.038 | 0.039 | 0.057 | 0.038 | 0.037 | 0.056 |
| 5 | SMMNX | 0.013 | 0.013 | 0.031 | 0.037 | 0.037 | 0.054 |
| 6 | SMMYX | 0.040 | 0.039 | 0.057 | 0.039 | 0.038 | 0.056 |
| 7 | SMPGX | 0.038 | 0.038 | 0.056 | 0.038 | 0.038 | 0.056 |
| 8 | SMTWX | 0.038 | 0.037 | 0.054 | 0.037 | 0.037 | 0.054 |
| 9 | SMXJZ | 0.038 | 0.038 | 0.057 | 0.037 | 0.038 | 0.057 |
| 10 | SMZSZ | 0.037 | 0.037 | 0.056 | 0.041 | 0.040 | 0.058 |
| Directions | Measured RMS/cm/s2 | Dynamic Range/dB | Useful Resolution/bits |
|---|---|---|---|
| E-W | 0.037–0.041 | 90.57–91.46 | 15.0–15.2 |
| N-S | 0.037–0.041 | 90.57–91.46 | 15.0–15.2 |
| U-D | 0.054–0.058 | 87.56–88.18 | 14.5–14.6 |
| Event No. | Date and Time | Lat./° | Lon./° | Dep./km | Mag. | Station Code | Distance/km | PGA/cm/s2 E-W/N-S/U-D |
|---|---|---|---|---|---|---|---|---|
| 1 | 02/May/2018 04:28:44 | 28.5 | 102.7 | 21 | 3.2 | SMZSZ | 21.95 | 2.76/2.66/1.25 |
| SMMNX | 53.05 | 0.8/0.8/0.4 | ||||||
| 2 | 16/May/2018 16:44:02 | 29.2 | 102.3 | 9 | 3.2 | SMCLX | 7.72 | 45.64/49.47/12.14 |
| SMMNX | 73.55 | 1.7/1.5/0.6 | ||||||
| 3 | 03/Jan/2019 08:48:06 | 28.2 | 104.9 | 15 | 5.3 | SMBTX | 212.37 | 0.99/0.97/0.4 |
| SMMNX | 270.86 | 0.6/0.7/0.3 | ||||||
| 4 | 24/Feb/2019 05:38:10 | 29.5 | 104.5 | 5 | 4.7 | SMTWX | 228.81 | 0.65/0.63/0.48 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, J.; Li, Z.; Meng, H.; Wang, J.; Shan, X. Performance Evaluation of Low-Cost Seismic Sensors for Dense Earthquake Early Warning: 2018–2019 Field Testing in Southwest China. Sensors 2019, 19, 1999. https://doi.org/10.3390/s19091999
Fu J, Li Z, Meng H, Wang J, Shan X. Performance Evaluation of Low-Cost Seismic Sensors for Dense Earthquake Early Warning: 2018–2019 Field Testing in Southwest China. Sensors. 2019; 19(9):1999. https://doi.org/10.3390/s19091999
Chicago/Turabian StyleFu, Jihua, Zhitao Li, Hao Meng, Jianjun Wang, and Xinjian Shan. 2019. "Performance Evaluation of Low-Cost Seismic Sensors for Dense Earthquake Early Warning: 2018–2019 Field Testing in Southwest China" Sensors 19, no. 9: 1999. https://doi.org/10.3390/s19091999
APA StyleFu, J., Li, Z., Meng, H., Wang, J., & Shan, X. (2019). Performance Evaluation of Low-Cost Seismic Sensors for Dense Earthquake Early Warning: 2018–2019 Field Testing in Southwest China. Sensors, 19(9), 1999. https://doi.org/10.3390/s19091999