Travel Route Planning with Optimal Coverage in Difficult Wireless Sensor Network Environment



Abstract
:1. Introduction
2. Related Work
2.1. Clustering Based Schema with Fixed Sink
2.2. Data Mule Based Schema
2.3. Rendezvous Based Schema
3. System Model
3.1. Fundamental Assumptions
- (1)
- All the sensors keep static after deployment, and once their energy is exhausted, they will be invalid.
- (2)
- Sensors can adjust their communication distance within communication range and single hop communication are mainly utilized for data uploading.
- (3)
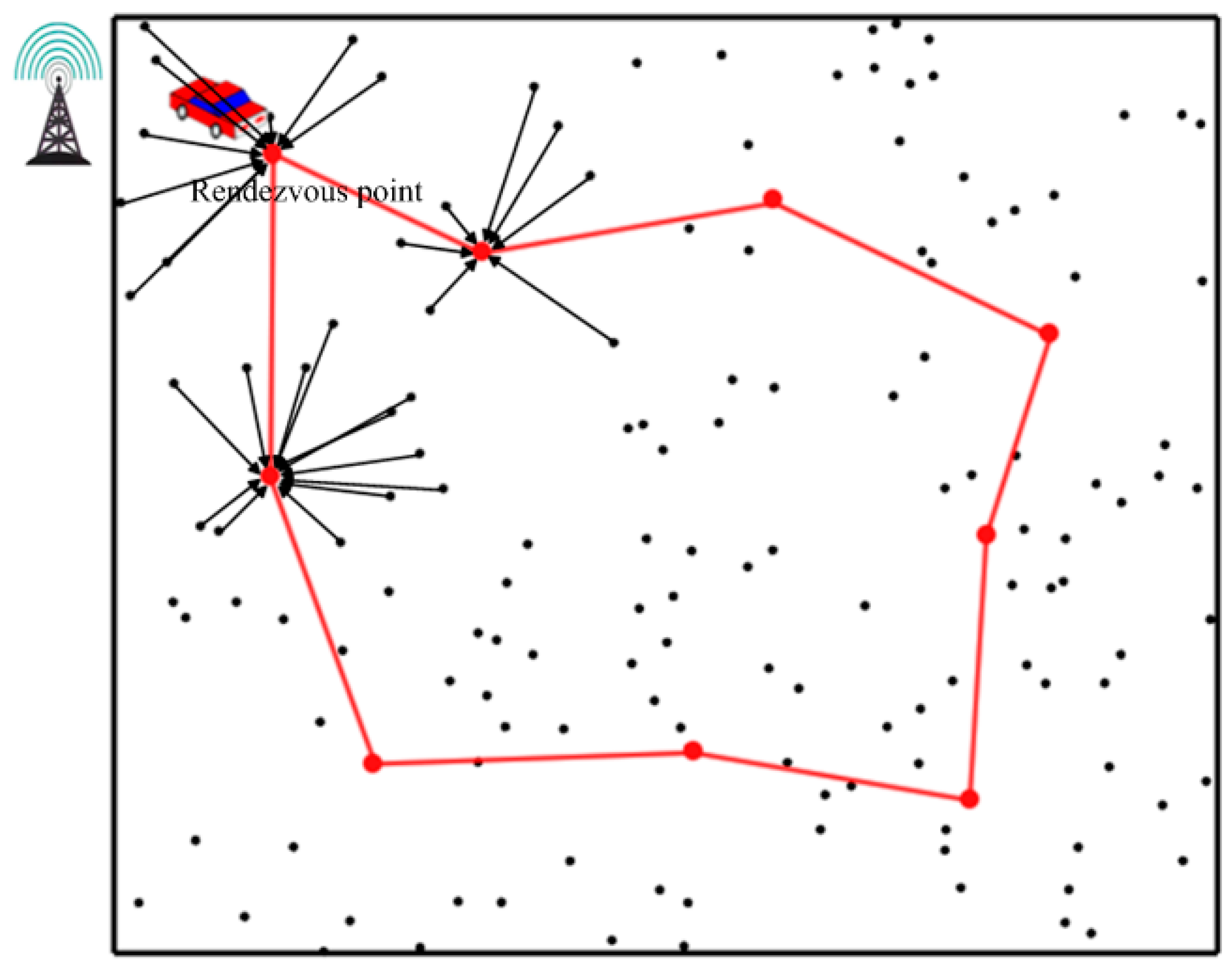
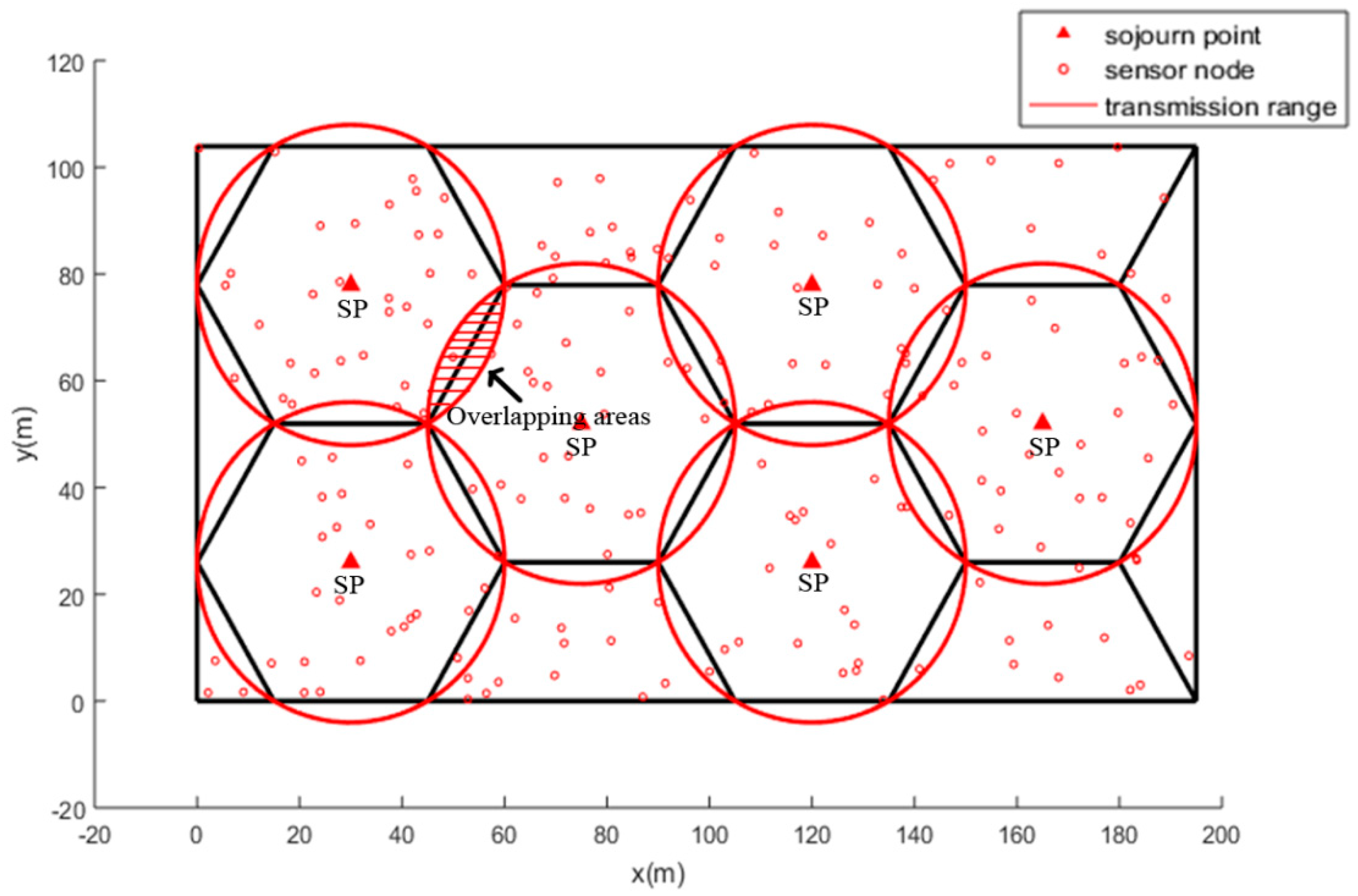
- We define the sojourn points (SPs) as the places where the mobile collector stops for data gathering.
- (4)
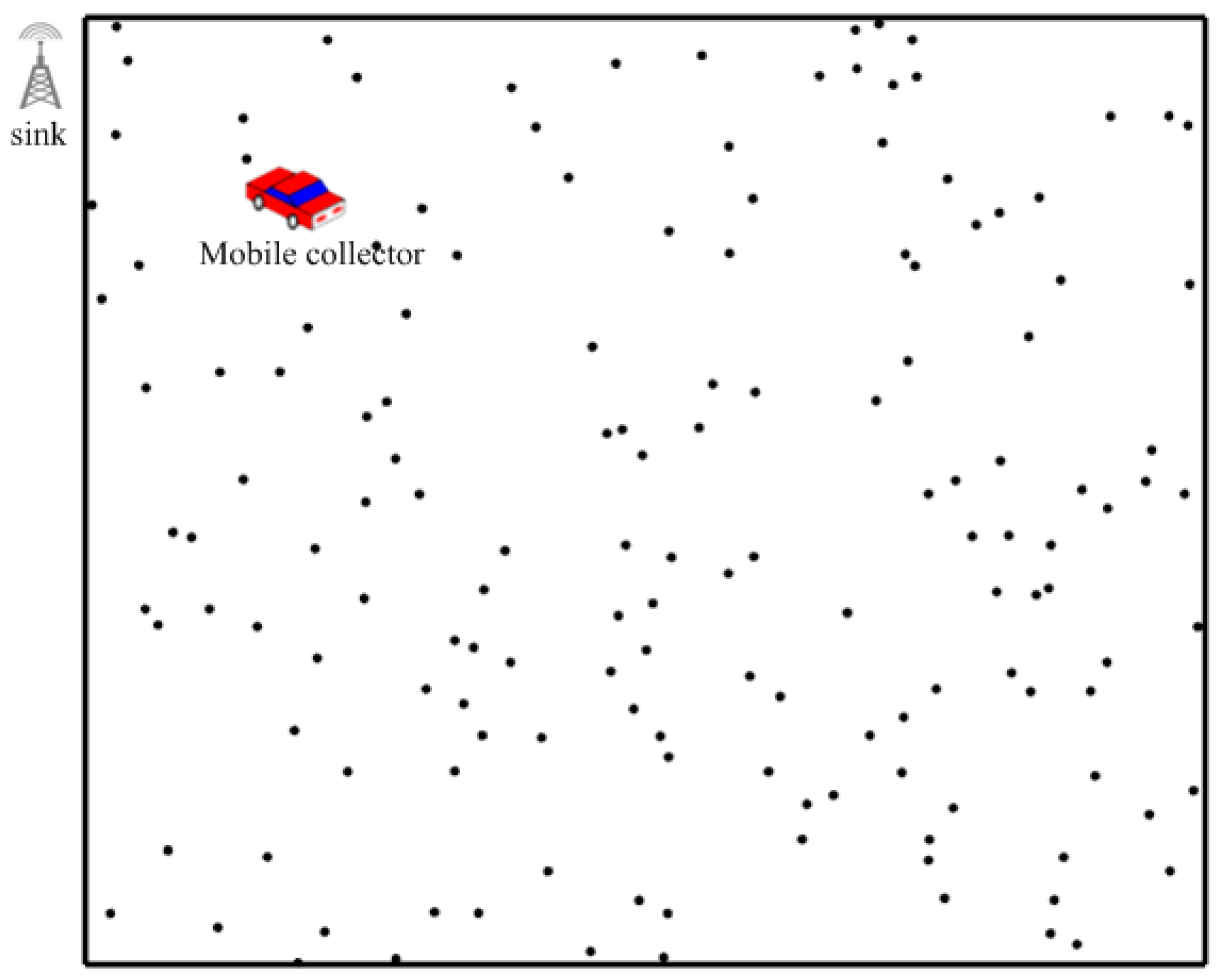
- A static sink is set at the corner of the sensor field, and during each round, the mobile collector will visit the sink once to upload its collected data.
- (5)
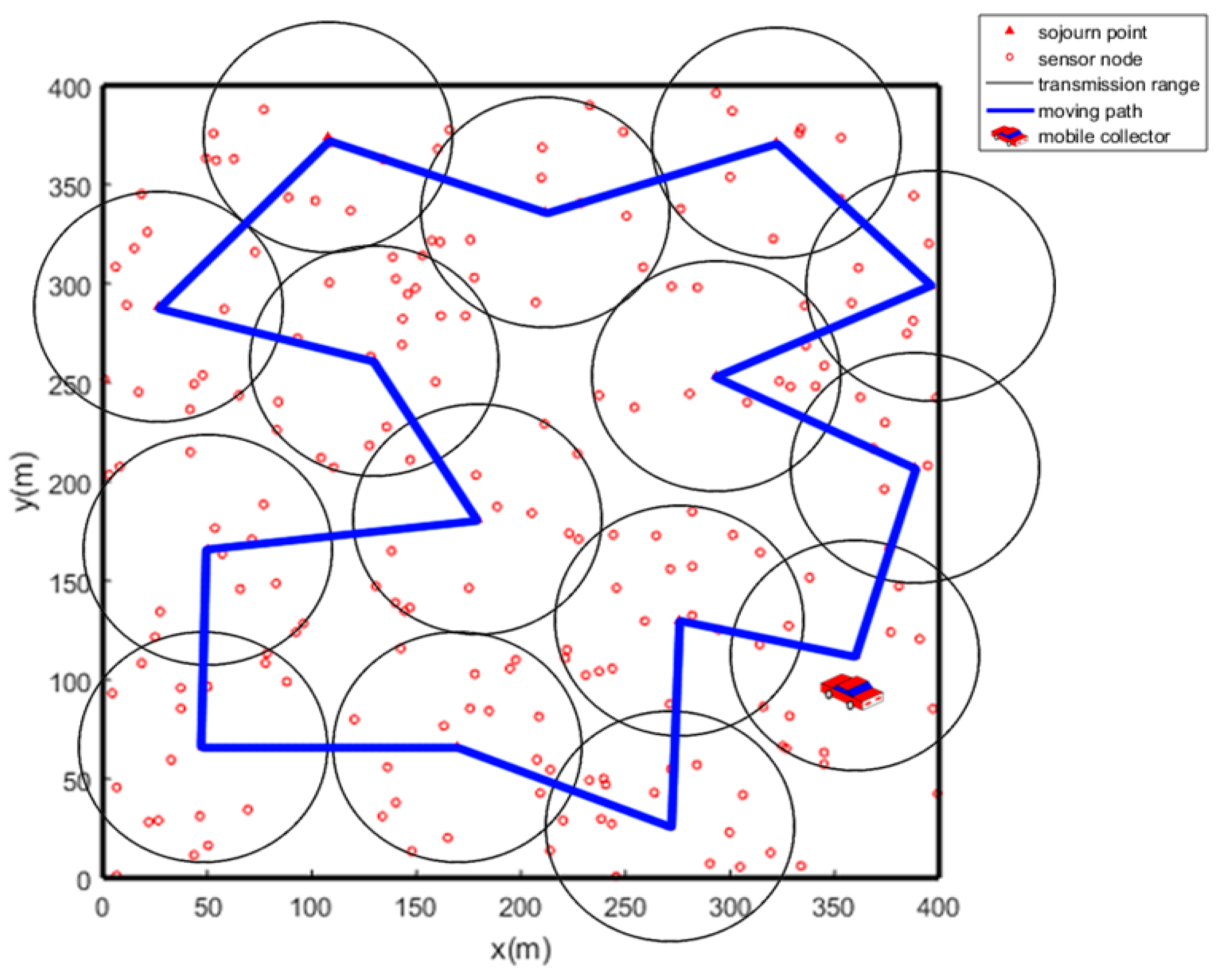
- A mobile collector which is modified by an intelligent car is employed for data gathering. It travels through the sensor field and only stops at SPs which are elaborately selected for data gathering.
3.2. Network Model
3.3. Energy Model
4. Our Presented TRP-MC Algorithm
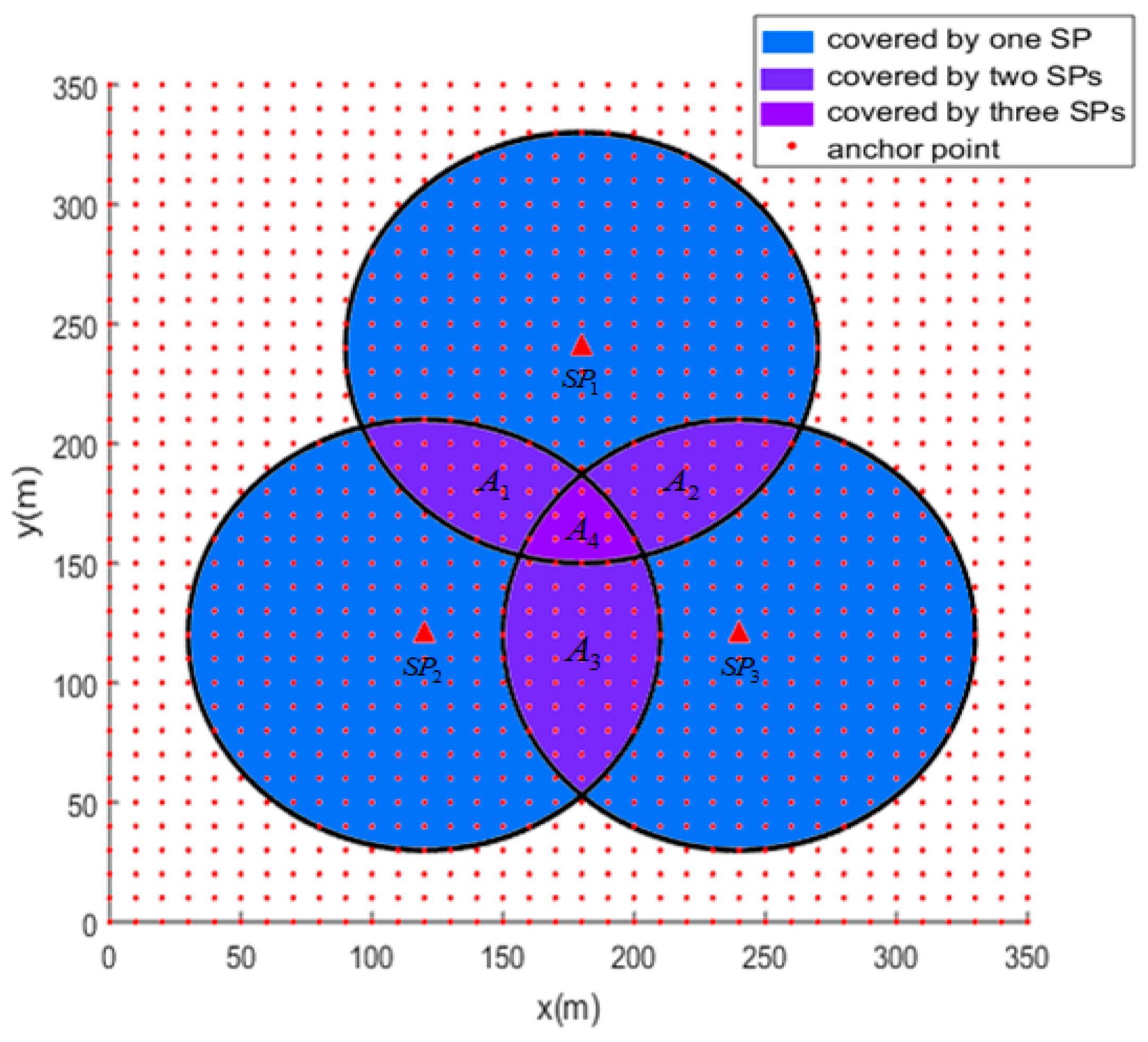
4.1. Coverage Problem Formulation
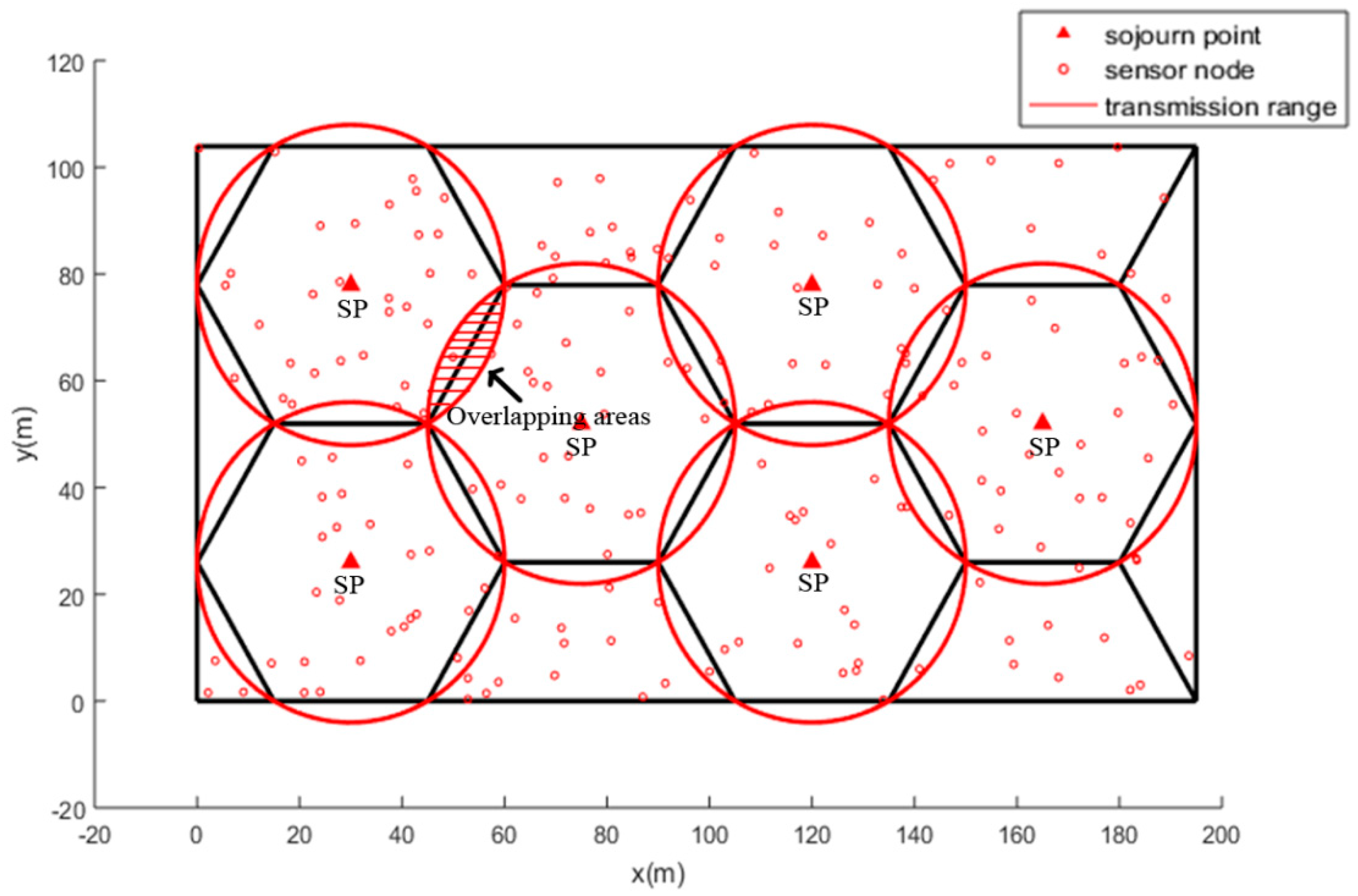
4.2. Hexagon Division
4.3. Coverage Optimization Using PSO
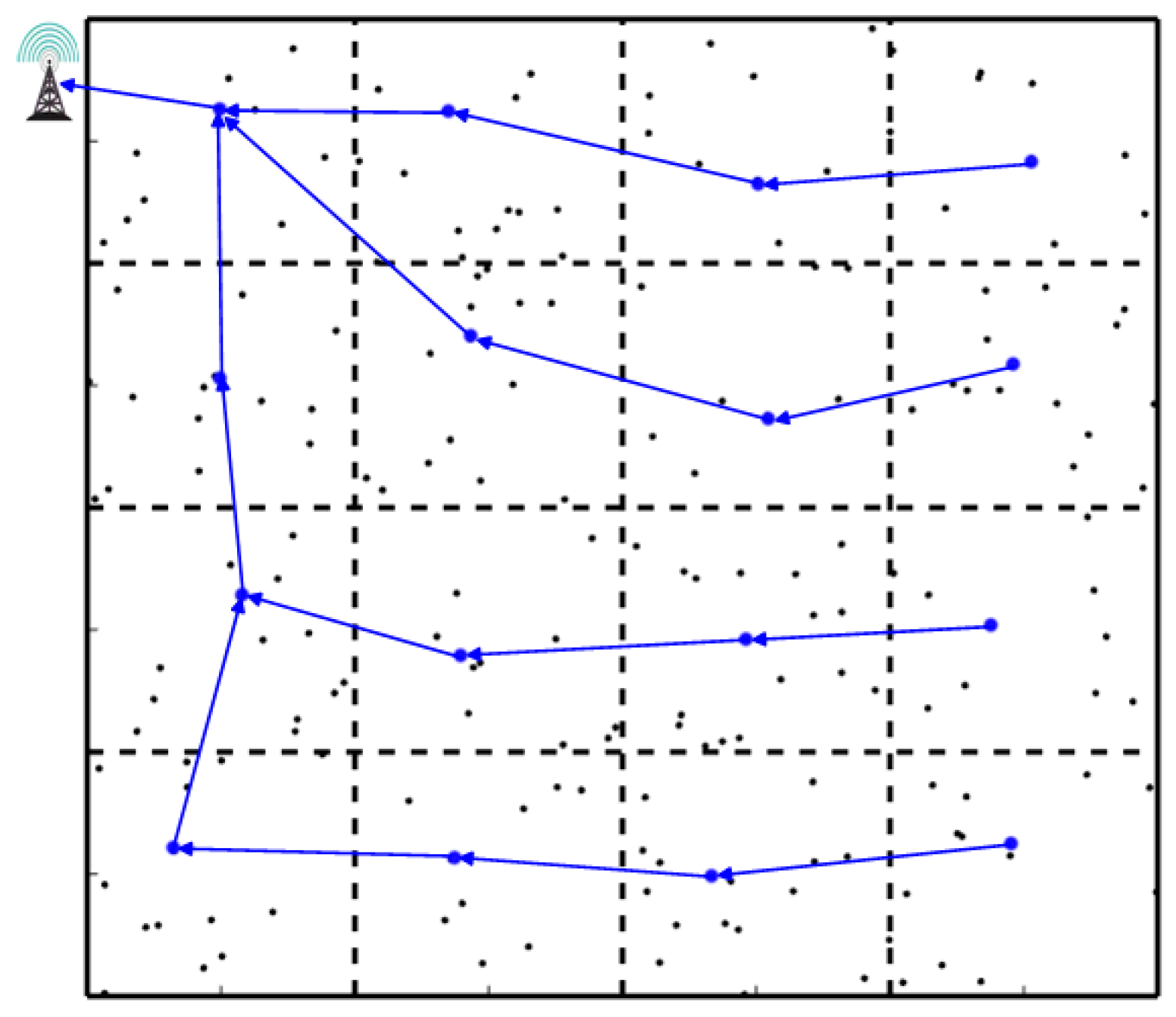
4.4. Travel Path Planning Using ACO
5. Performance Evaluation
5.1. Parameters for PSO and ACO
5.2. Network Parameters and Settings
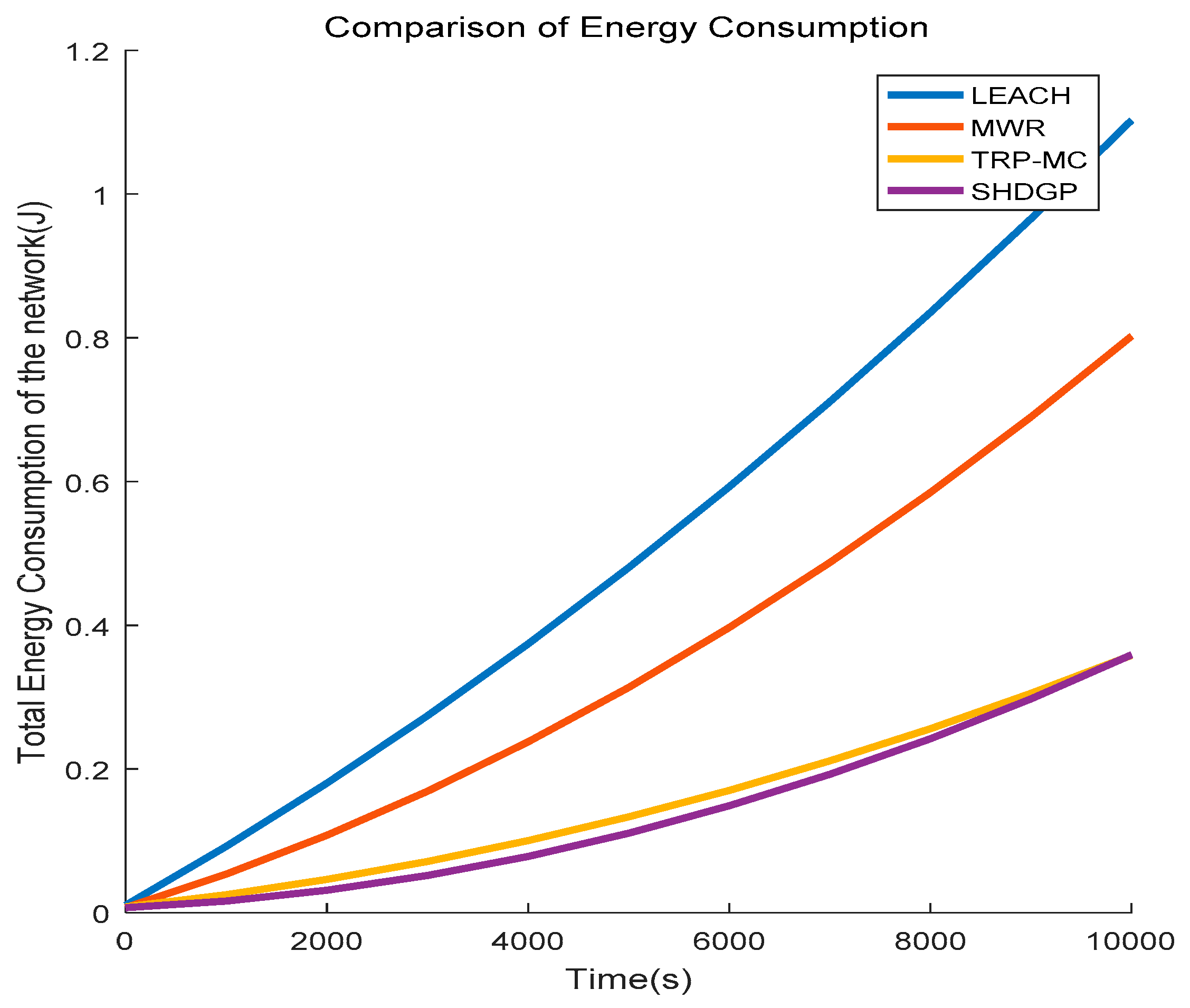
5.3. Comparison of Energy Consumption
5.4. Comparison of Network Lifetime
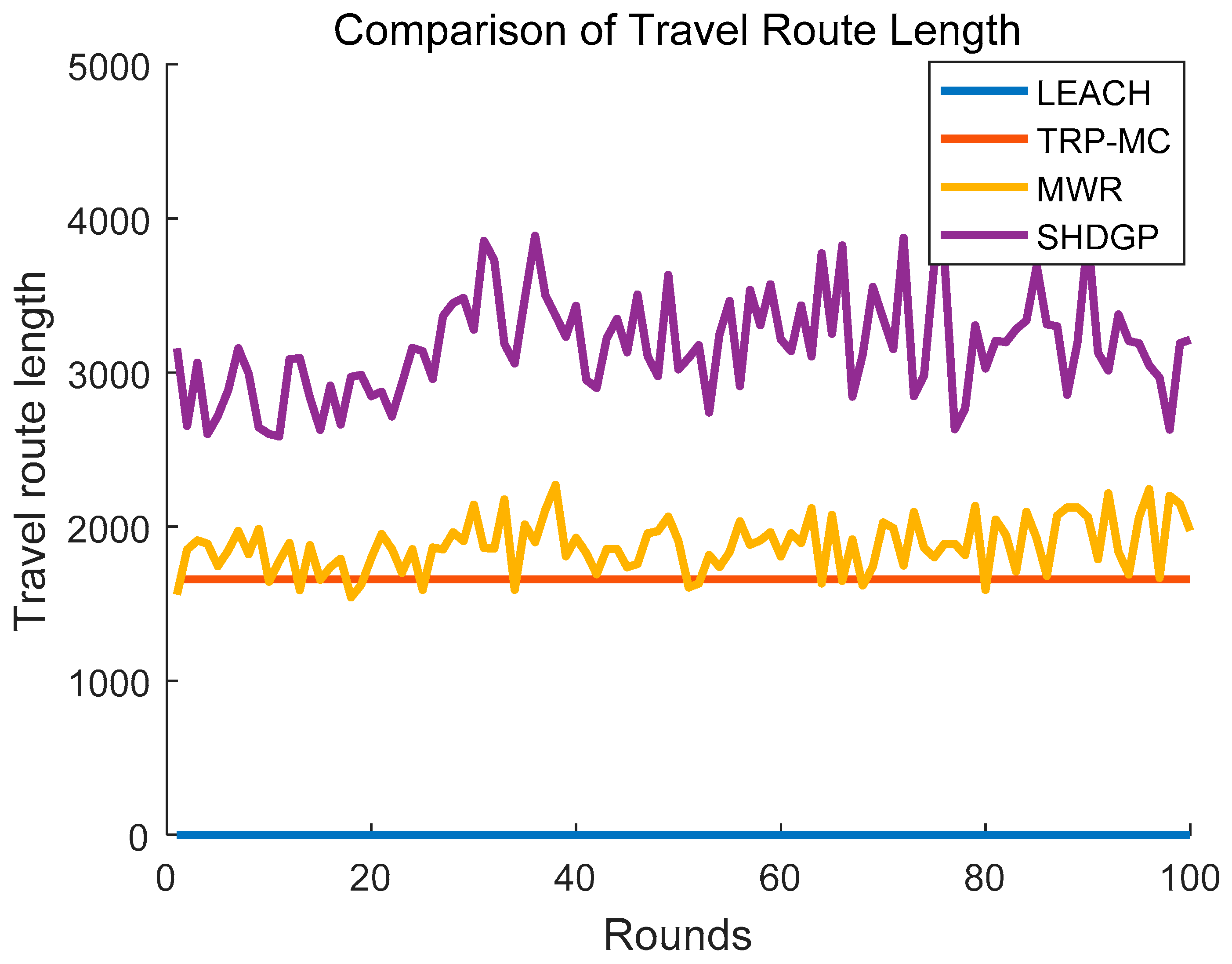
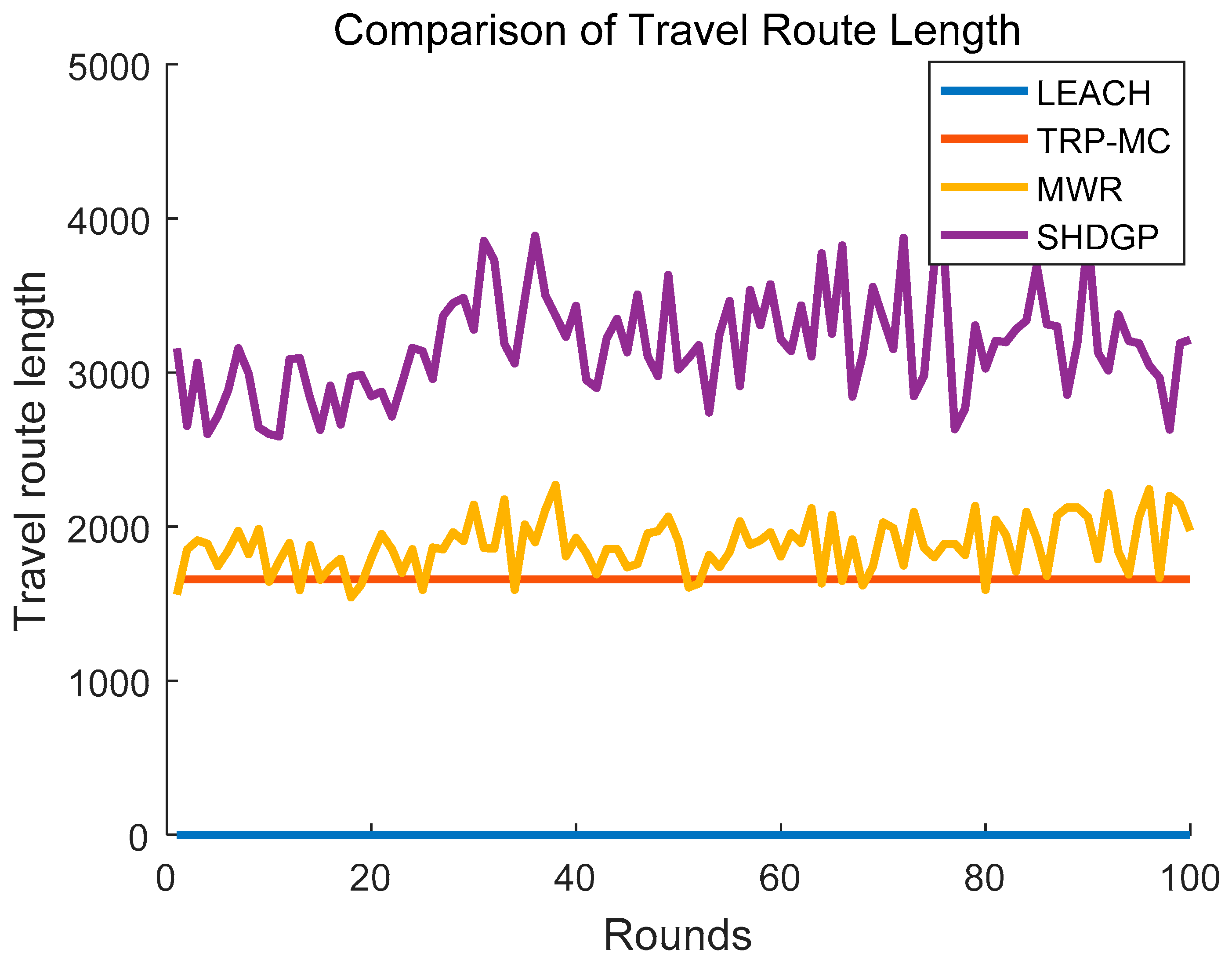
5.5. Comparison of Travel Route Length
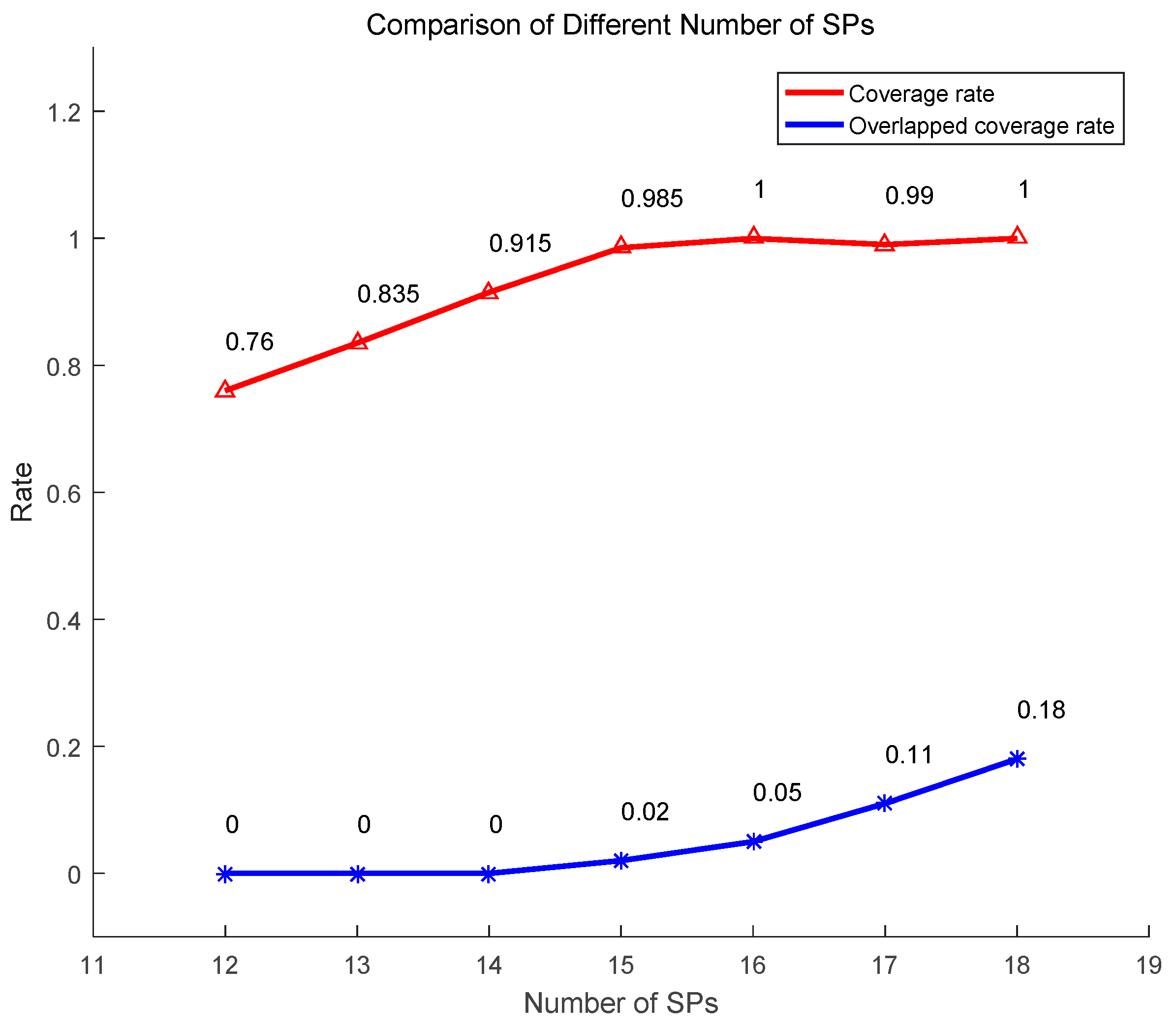
5.6. Study on the Nnumber of SPs
6. Discussion and Future Work
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Data Availability
References
- Tunca, C.; Isik, S.; Donmez, M.Y.; Ersoy, C. Distributed Mobile Sink Routing for Wireless Sensor Networks: A Survey. IEEE Commun. Surv. Tutor. 2014, 16, 877–897. [Google Scholar] [CrossRef]
- Yu, S.; Zhang, B.; Li, C.; Mouftah, H. Routing protocols for wireless sensor networks with mobile sinks: A survey. IEEE Commun. Mag. 2014, 52, 150–157. [Google Scholar] [CrossRef]
- Galloway, B.; Hancke, G.P. Introduction to industrial control networks. IEEE Commun. Surv. Tutor. 2012, 15, 860–880. [Google Scholar] [CrossRef]
- Ren, Y.; Liu, Y.; Ji, S.; Sangaiah, A.K.; Wang, J. Incentive Mechanism of Data Storage Based on Blockchain for Wireless Sensor Networks. Mob. Inf. Syst. 2018, 2018, 6874158. [Google Scholar] [CrossRef]
- Wang, J.; Gao, J.; Liu, W.; Wu, W.; Lim, J. An Asynchronous Clustering and Mobile Data Gathering Schema based on Timer Mechanism in Wireless Sensor Networks. Comput. Mater. Contin. 2019, 58, 711–725. [Google Scholar] [CrossRef]
- Butun, I.; Morgera, S.D.; Sankar, R. A survey of intrusion detection systems in wireless sensor networks. IEEE Commun. Surv. Tutor. 2014, 16, 266–282. [Google Scholar] [CrossRef]
- Krontiris, I.; Langheinrich, M.; Shilton, K. Trust and privacy in mobile experience sharing: Future challenges and avenues for research. IEEE Commun. Mag. 2014, 52, 50–55. [Google Scholar] [CrossRef]
- De, D.; Mukherjee, A.; Sau, A.; Bhakta, I. Design of smart neonatal health monitoring system using smcc. Healthc. Technol. Lett. 2016, 4, 13. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Zhang, Z.; Li, B.; Lee, S.; Sherratt, R.S. An Enhanced Fall Detection System for Elderly Person Monitoring using Consumer Home Networks. IEEE Trans. Consum. Electron. 2014, 60, 23–29. [Google Scholar] [CrossRef]
- Ya, T.; Lin, Y.; Wang, J.; Kim, J. Semi-supervised Learning with Generative Adversarial Networks on Digital Signal Modulation Classification. Comput. Mater. Contin. 2018, 55, 243–254. [Google Scholar]
- Tirkolaee, E.B.; Hosseinabadi, A.R.; Soltani, M.; Sangaiah, A.K.; Wang, J. A Hybrid Genetic Algorithm for Multi-trip Green Capacitated Arc Routing Problem in the Scope of Urban Services. Sustainability 2018, 10, 1366. [Google Scholar] [CrossRef]
- Hu, X.; Yang, L.; Xiong, W. A novel wireless sensor network frame for urban transportation. IEEE Internet Things J. 2015, 2, 586–595. [Google Scholar] [CrossRef]
- Wang, H.; Dong, L.; Wei, W.; Zhao, W.S.; Xu, K.; Wang, G. The wsn monitoring system for large outdoor advertising boards based on Zigbee and MEMS sensor. IEEE Sens. J. 2017, 18, 1314–1323. [Google Scholar] [CrossRef]
- Wang, J.; Ju, C.; Gao, Y.; Sangaiah, A.K.; Kim, G. A PSO based Energy Efficient Coverage Control Algorithm for Wireless Sensor Networks. Comput. Mater. Contin. 2018, 56, 433–446. [Google Scholar]
- Yun, Y.S.; Xia, Y. Maximizing the lifetime of wireless sensor networks with mobile sink in delay-tolerant applications. IEEE Trans. Mob. Comput. 2010, 9, 1308–1318. [Google Scholar]
- Ma, C.; Yang, Y. A battery-aware scheme for routing in wireless ad hoc networks. IEEE Trans. Veh. Technol. 2011, 60, 3919–3932. [Google Scholar] [CrossRef]
- Sha, K.; Gehlot, J.; Greve, R. Multipath routing techniques in wireless sensor networks: A survey. Wirel. Pers. Commun. 2013, 70, 807–829. [Google Scholar] [CrossRef]
- Wang, J.; Cao, J.; Sherratt, R.S.; Park, J.H. An improved ant colony optimization-based approach with mobile sink for wireless sensor networks. J. Supercomput. 2018, 74, 6633–6645. [Google Scholar] [CrossRef]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 7 January 2000. [Google Scholar]
- Lindsey, S.; Raghavendra, C.S. PEGASIS: Power efficient gathering in sensor information systems. Proc. IEEE Aerosp. Conf. 2003, 3, 1125–1130. [Google Scholar]
- Younis, O.; Fahmy, S. HEED: A Hybrid, Energy-efficient, Distributed Clustering Approach for Ad hoc Sensor Networks. IEEE Trans. Mob. Comput. 2004, 3, 366–379. [Google Scholar] [CrossRef]
- Li, C.; Ye, M.; Chen, G.; Wu, J. An energy-efficient unequal clustering mechanism for wireless sensor networks. In Proceedings of the IEEE International Conference on Mobile Adhoc and Sensor Systems Conference, Washington, DC, USA, 7 November 2005. [Google Scholar]
- Leu, J.S.; Chiang, T.H.; Yu, M.C.; Su, K.W. Energy efficient clustering scheme for prolonging the lifetime of wireless sensor network with isolated nodes. IEEE Commun. Lett. 2015, 19, 259–262. [Google Scholar] [CrossRef]
- Liu, Y.; Xiong, N.; Zhao, Y.; Vasilakos, A.V.; Jia, Y. Multi-layer clustering routing algorithm for wireless vehicular sensor networks. IET Commun. 2010, 4, 810–816. [Google Scholar] [CrossRef]
- Luo, H.; Ye, F.; Cheng, J.; Lu, S.; Zhang, L. Ttdd: Two-tier data dissemination in large-scale wireless sensor networks. Wirel. Netw. 2005, 11, 161–175. [Google Scholar] [CrossRef]
- Dongliang, X.; Xiaojie, W.; Dan, L. Multiple mobile sinks data dissemination mechanism for large scale Wireless Sensor Network. China Commun. 2014, 11, 1–8. [Google Scholar] [CrossRef]
- El-Moukaddem, F.; Torng, E.; Xing, G. Maximizing Network Topology Lifetime Using Mobile Node Rotation. In International Conference on Wireless Algorithms, Systems, and Applications; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Wang, J.; Cao, J.; Ji, S.; Park, J. Energy Efficient Cluster-based Dynamic Routes Adjustment Approach for Wireless Sensor Networks with Mobile Sinks. J. Supercomput. 2017, 73, 3277–3290. [Google Scholar] [CrossRef]
- Rasheed, A.; Mahapatra, R.N. The Three-Tier Security Scheme in Wireless Sensor Networks with Mobile Sinks. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 958–965. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Yin, X.; Li, F.; Kim, H. An Enhanced PEGASIS Algorithm with Mobile Sink Support for Wireless Sensor Networks. Wirel. Commun. Mob. Comput. 2018, 2018, 9472075. [Google Scholar] [CrossRef]
- Miao, Y.; Sun, Z.; Wang, N.; Cao, Y.; Cruickshank, H. Time efficient data collection with mobile sink and vmimo technique in wireless sensor networks. IEEE Syst. J. 2016, 12, 639–647. [Google Scholar] [CrossRef]
- Zhao, M.; Yang, Y.; Wang, C. Mobile Data Gathering with Load Balanced Clustering and Dual Data Uploading in Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2015, 14, 770–785. [Google Scholar] [CrossRef]
- Metin, K.; Korpeoglu, I. Coordinated movement of multiple mobile sinks in a wireless sensor network for improved lifetime. EURASIP J. Wirel. Commun. Netw. 2015, 2015, 245. [Google Scholar]
- Ma, M.; Yang, Y.; Zhao, M. Tour Planning for Mobile Data-Gathering Mechanisms in Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2013, 62, 1472–1483. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Liu, W.; Sangaiah, A.K.; Kim, H. An Improved Routing Schema with Special Clustering using PSO Algorithm for Heterogeneous Wireless Sensor Network. Sensors 2019, 19, 671. [Google Scholar] [CrossRef] [PubMed]
- Shi, G.; Zheng, J.; Yang, J.; Zhao, Z. Double-blind data discovery using double cross for large-scale wireless sensor networks with mobile sinks. IEEE Trans. Veh. Technol. 2012, 61, 2294–2304. [Google Scholar]
- Gao, Y.; Wang, J.; Wu, W.; Sangaiah, A.K.; Lim, S. A Hybrid Method for Mobile Agent Moving Trajectory Scheduling using ACO and PSO in WSNs. Sensors 2019, 19, 575. [Google Scholar] [CrossRef]
- Kuila, P.; Jana, P.K. Energy efficient clustering and routing algorithms for wireless sensor networks: Particle swarm optimization approach. Eng. Appl. Artif. Intell. 2014, 33, 127–140. [Google Scholar] [CrossRef]
- Wang, G.; Wang, T.; Jia, W.; Guo, M.; Li, J. Adaptive location updates for mobile sinks in wireless sensor networks. J. Supercomput. 2009, 47, 127–145. [Google Scholar] [CrossRef]
- Soni, V.; Mallick, D.K. Fuzzy logic based multihop topology control routing protocol in wireless sensor networks. Microsyst. Technol. 2018, 24, 2357–2369. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 29–41. [Google Scholar] [CrossRef]
- Kennedy, J. Particle Swarm Optimization. In Proceedings of the ICNN95—International Conference on Neural Networks, Perth, Australia, 6 August 2002; pp. 12–17. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocol Name | Year | Targets | Routing Schema | Sink Type | Clustering | Topology Control | Contributions |
|---|---|---|---|---|---|---|---|
| LEACH [19] | 2000 | Energy efficient | Clustering-based | Single static sink | True | Distributed | Hierarchical routing |
| PEGASIS [20] | 2003 | Energy efficient | Clustering-based | Single static sink | False | Distributed | Chain structure routing |
| HEED [21] | 2004 | Energy efficient, energy balancing | Clustering-based | Single static sink | True | Distributed | Competitional CHs selection |
| EEUC [22] | 2005 | Energy balancing | Clustering-based | Single static sink | True | Distributed | Competitional CHs selection |
| TTDD [25] | 2005 | Efficient data delivery | Data mule based | Multiple mobile sinks | False | Query driven | Virtual grid division, dissemination nodes selection |
| MSDD [26] | 2014 | Energy efficient | Data mule based | Multiple mobile sinks | False | Query driven | Virtual grid division, dissemination nodes selection |
| MNTL-MNR [27] | 2012 | Energy balancing | Data mule based | Single static sink | False | Distributed | Adoption of mobile CHs |
| Wang et al. [28] | 2017 | Energy efficient, energy balancing | Data mule based | Single mobile sink | true | Centralized | Special clustering, dynamic routing |
| MWR [31] | 2016 | Minimize network latency | Rendezvous-based | Single mobile sink | False | Centralized | Combining clustering whit vMIMO |
| LBC-DUU [32] | 2015 | Energy efficient, energy balancing | Rendezvous-based | Single mobile sink | True | Distributed | Three-layer routing structure |
| MSMA [33] | 2015 | Energy efficient | Rendezvous-based | Single mobile sink | False | Distributed | Tree-structure routing |
| SHDGP [34] | 2013 | Tour length scheduling | Rendezvous-based | Multiple mobile sinks | False | Centralized | Network cost optimizing |
| Parameter Name | Parameter Value |
|---|---|
| Number of SPs () | 15 |
| Number of particles in PSO () | 50 |
| Inertia coefficient of particles in PSO () | 0.7 |
| Weight coefficients of local update in PSO () | 0.4 |
| Weight coefficients of global update in PSO () | 0.6 |
| Number of ants in ACO () | 30 |
| Control factor for pheromone concentration in ACO () | 2 |
| Control factor for inspired factor in ACO () | 3 |
| Volatilization rate of pheromone in ACO () | 0.5 |
| Parameter Name | Parameter Value |
|---|---|
| Length of the sensor field () | 400 × 400 m |
| Number of sensors () | 200 |
| Communication range of sensors () | 60 m |
| Primary energy of each sensor () | 0.05 J |
| Data generation rate of each sensor () | 1 bit/s |
| Capacity of each sensor () | 2 MB |
| Moving velocity of the mobile collector () | 2 m/s |
| Number of SPs (nsp) | [12,13,14,15,16] |
| Sojourn time for each SP () | 5 s |
| Energy consumption of transmission circuit () | 50 nJ/bit |
| Amplifier parameter for free-space model () | 10 pJ/bit/m2 |
| Amplifier parameter for multi-path model () | 0.0013 pJ/bit/m4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Wang, J.; Wu, W.; Sangaiah, A.K.; Lim, S.-J. Travel Route Planning with Optimal Coverage in Difficult Wireless Sensor Network Environment. Sensors 2019, 19, 1838. https://doi.org/10.3390/s19081838
Gao Y, Wang J, Wu W, Sangaiah AK, Lim S-J. Travel Route Planning with Optimal Coverage in Difficult Wireless Sensor Network Environment. Sensors. 2019; 19(8):1838. https://doi.org/10.3390/s19081838
Chicago/Turabian StyleGao, Yu, Jin Wang, Wenbing Wu, Arun Kumar Sangaiah, and Se-Jung Lim. 2019. "Travel Route Planning with Optimal Coverage in Difficult Wireless Sensor Network Environment" Sensors 19, no. 8: 1838. https://doi.org/10.3390/s19081838
APA StyleGao, Y., Wang, J., Wu, W., Sangaiah, A. K., & Lim, S.-J. (2019). Travel Route Planning with Optimal Coverage in Difficult Wireless Sensor Network Environment. Sensors, 19(8), 1838. https://doi.org/10.3390/s19081838