On-line Smoothing and Error Modelling for Integration of GNSS and Visual Odometry



Abstract
:1. Introduction
2. Visual Odometry
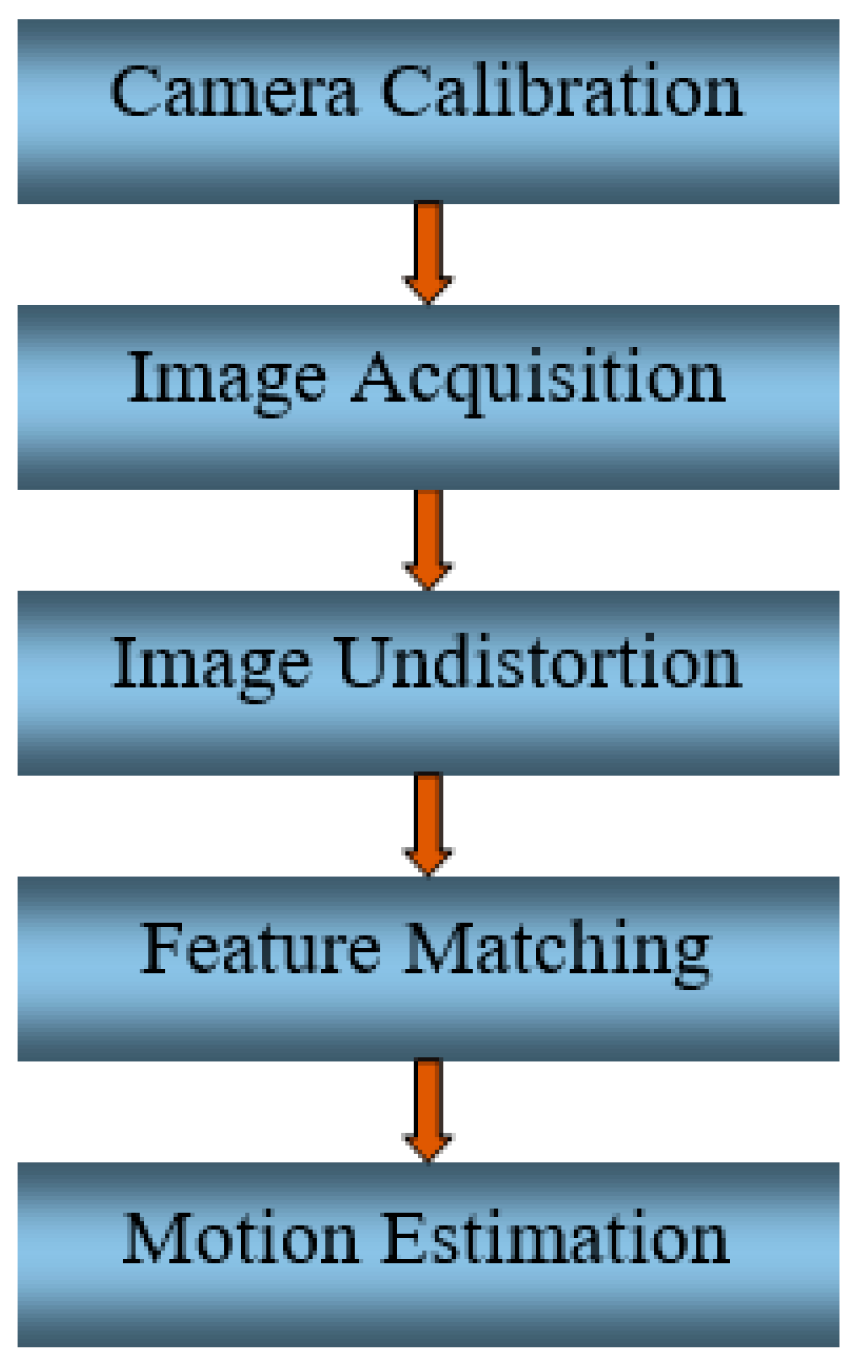
2.1. General Concept of VO
2.2. Camera Calibration
2.3. Image Acquisition and Undistortion
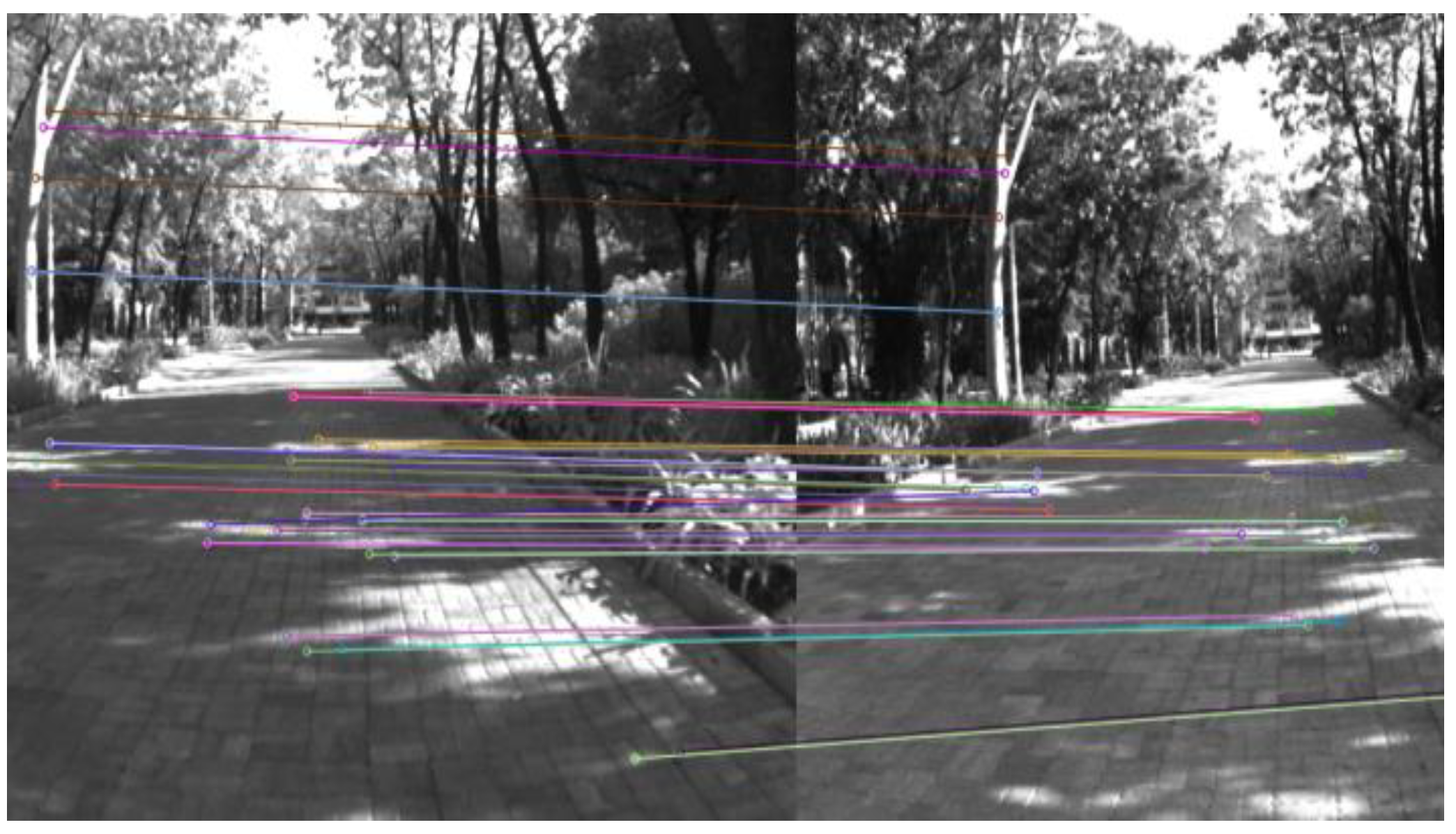
2.4. Feature Matching
2.5. Motion Estimation
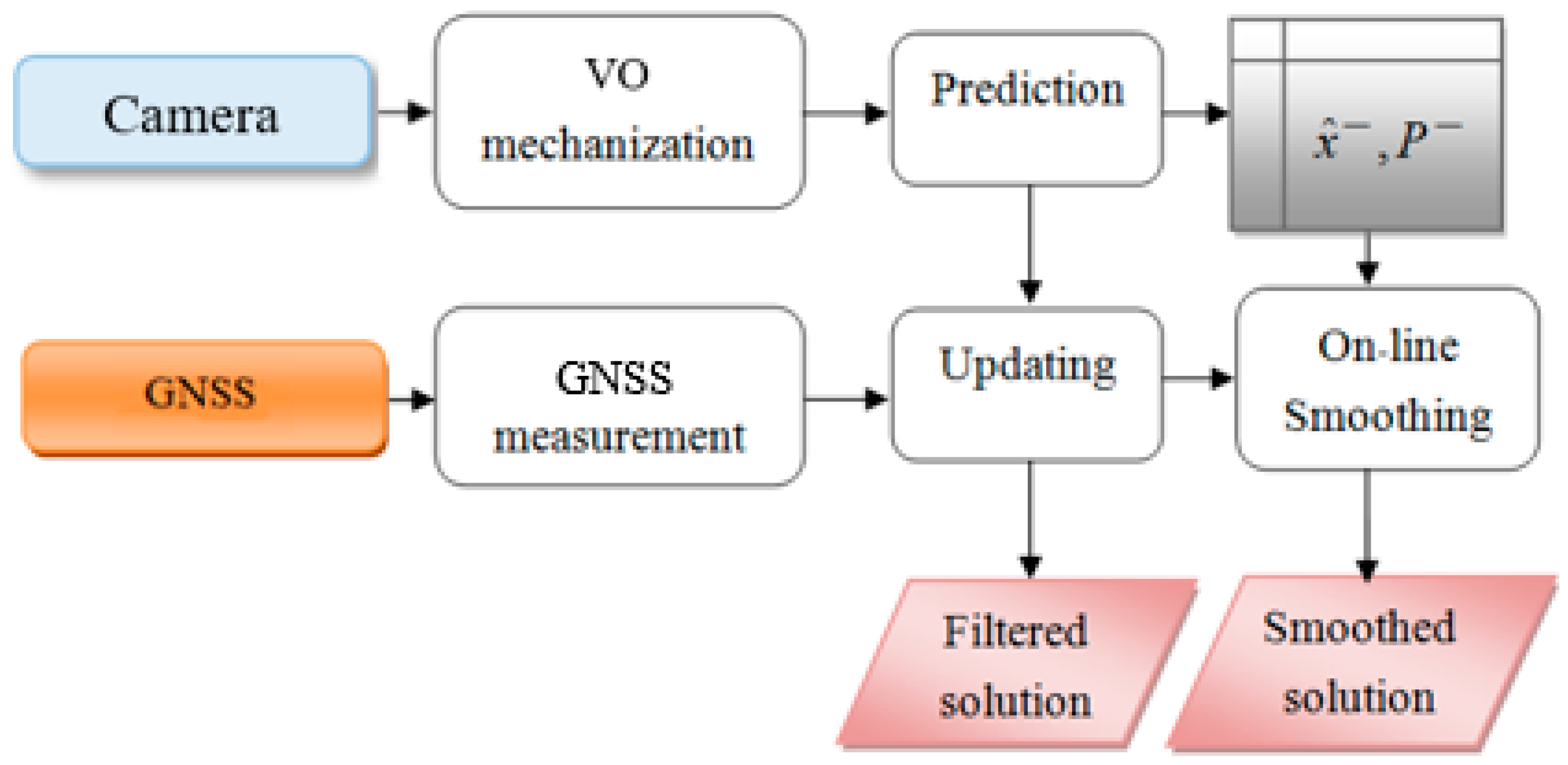
3. Integration Architecture
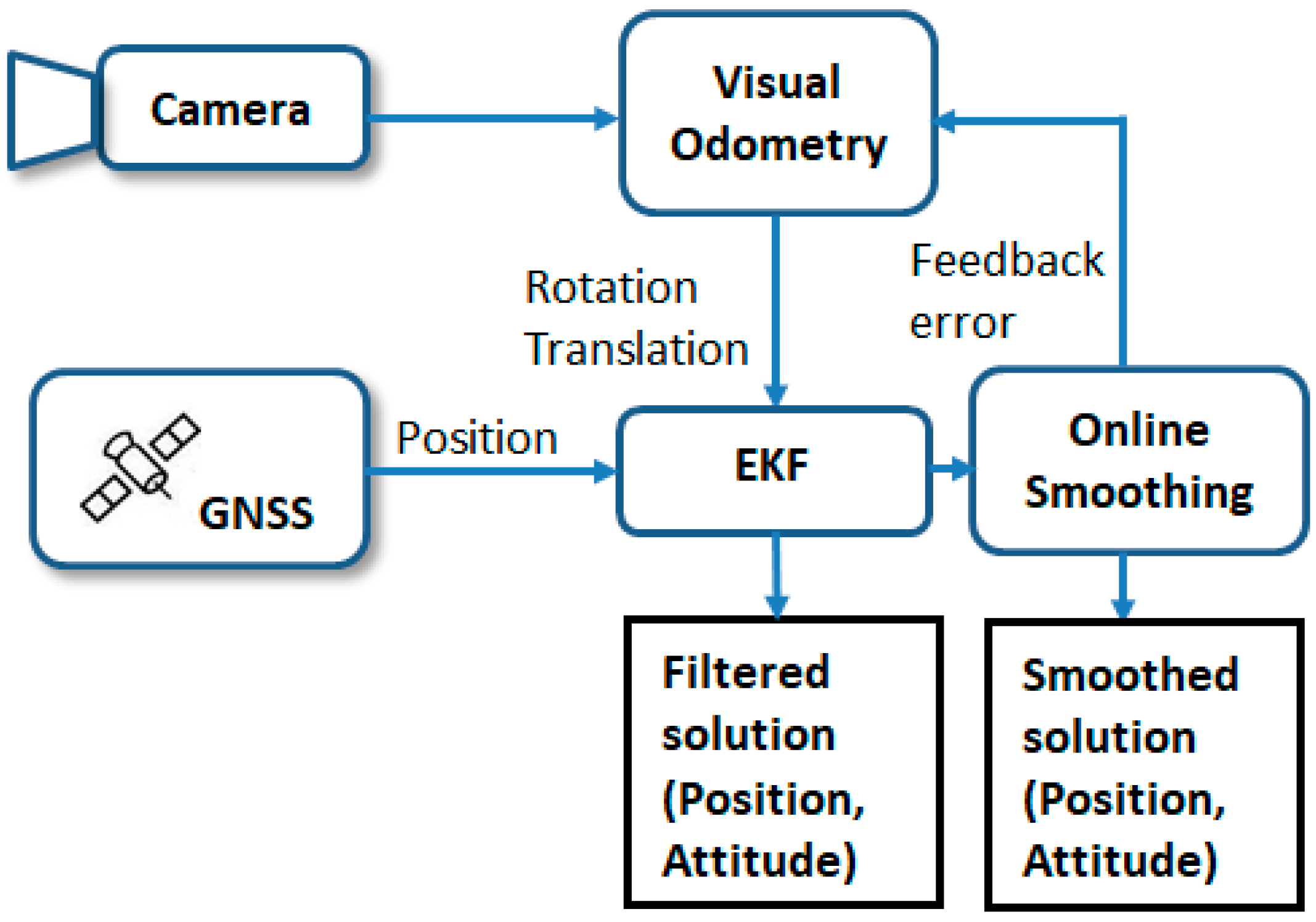
3.1. General Architecture Design
3.2. Model Design
4. Data Fusion Strategies
4.1. Estimation with Extended Kalman Filter
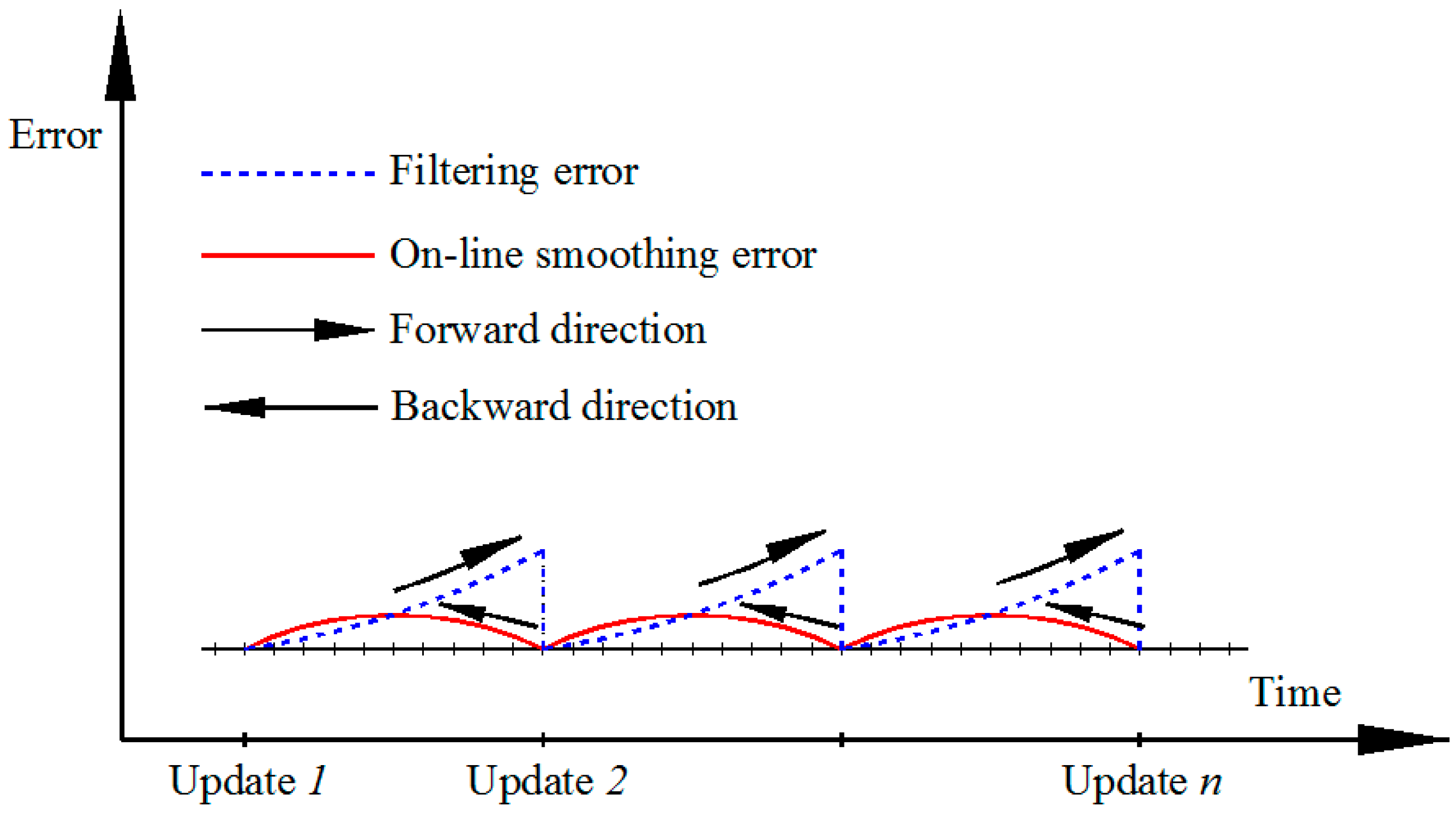
4.2. On-Line Smoothing
4.3. Error Modelling with On-Line Smoothing
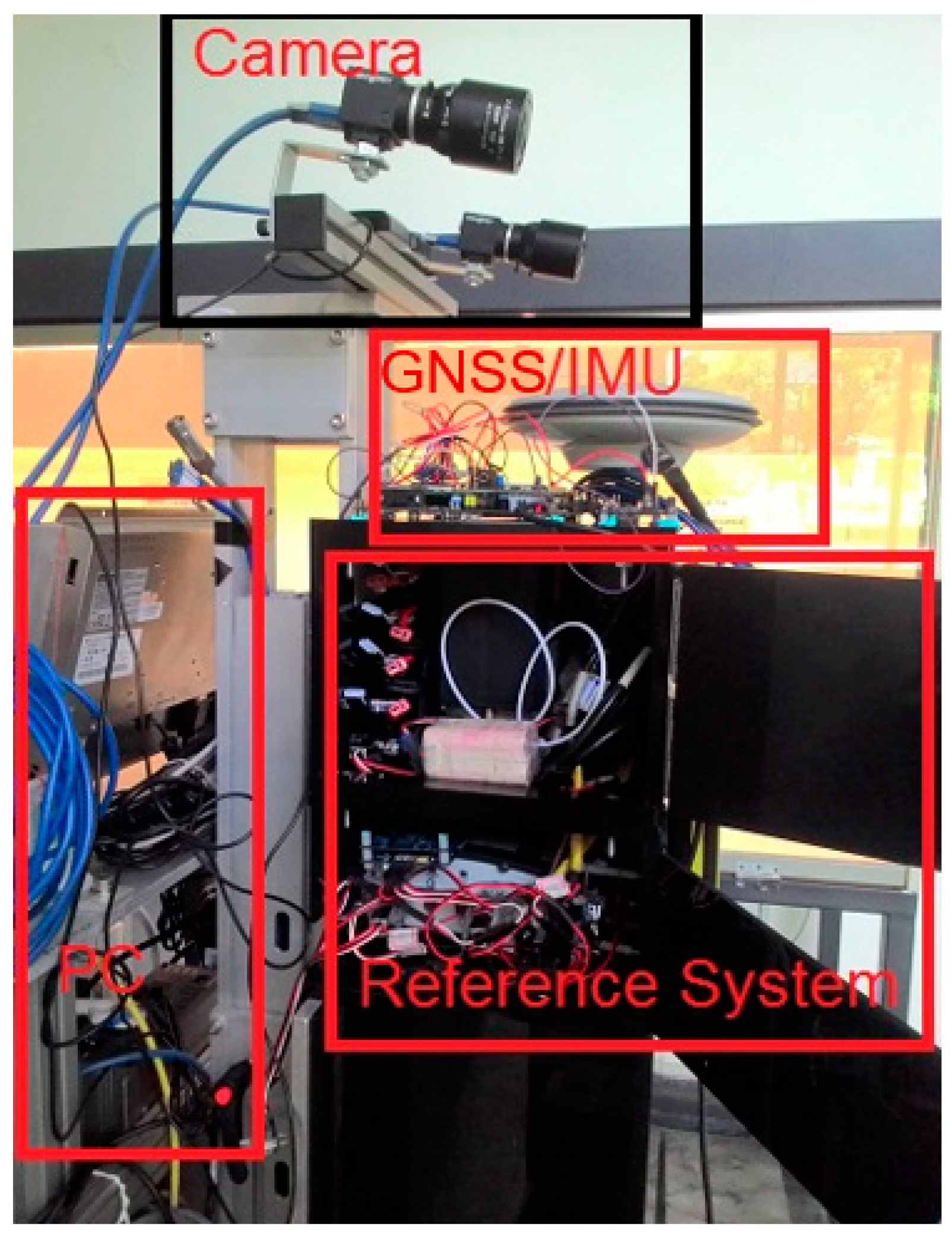
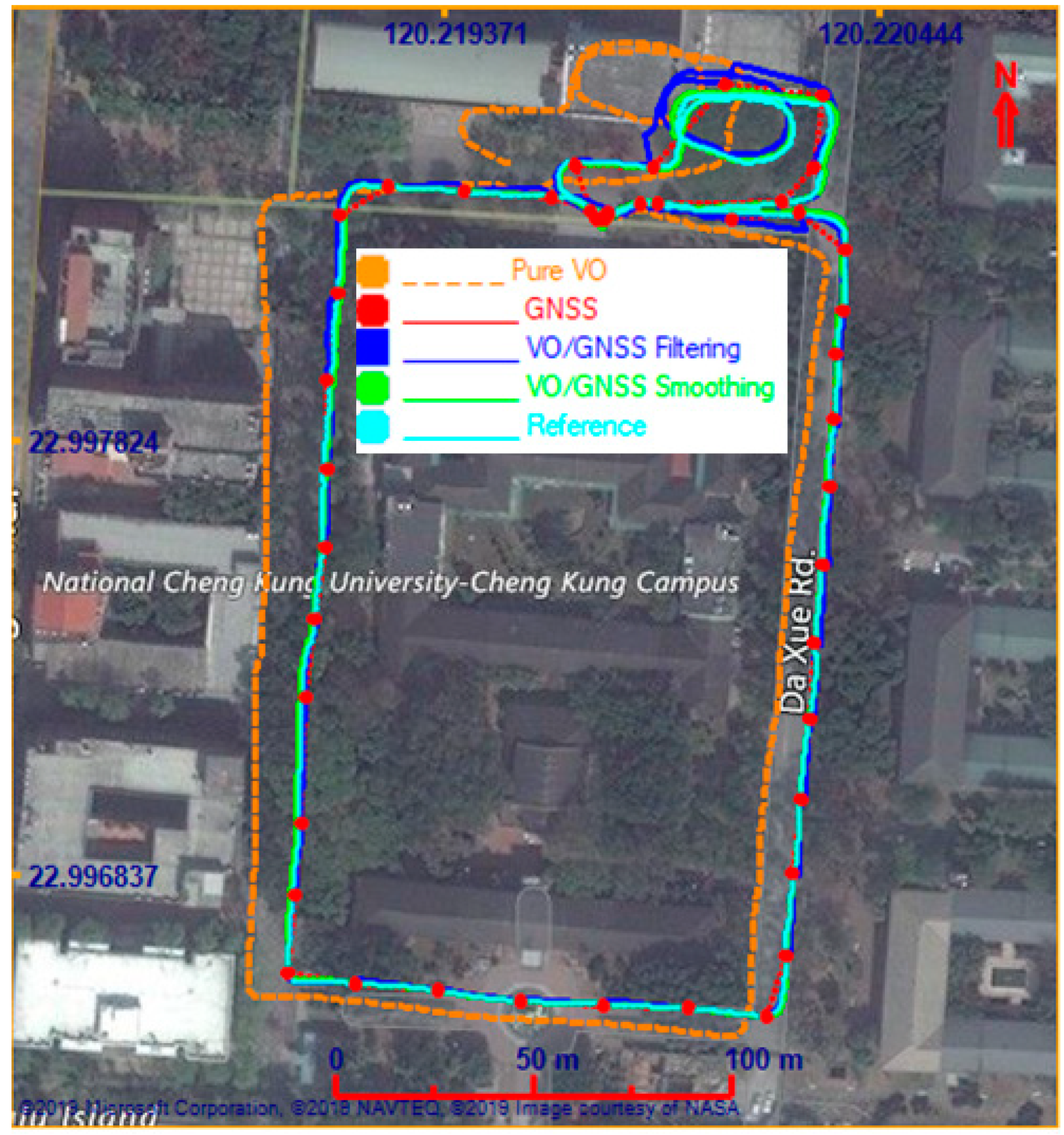
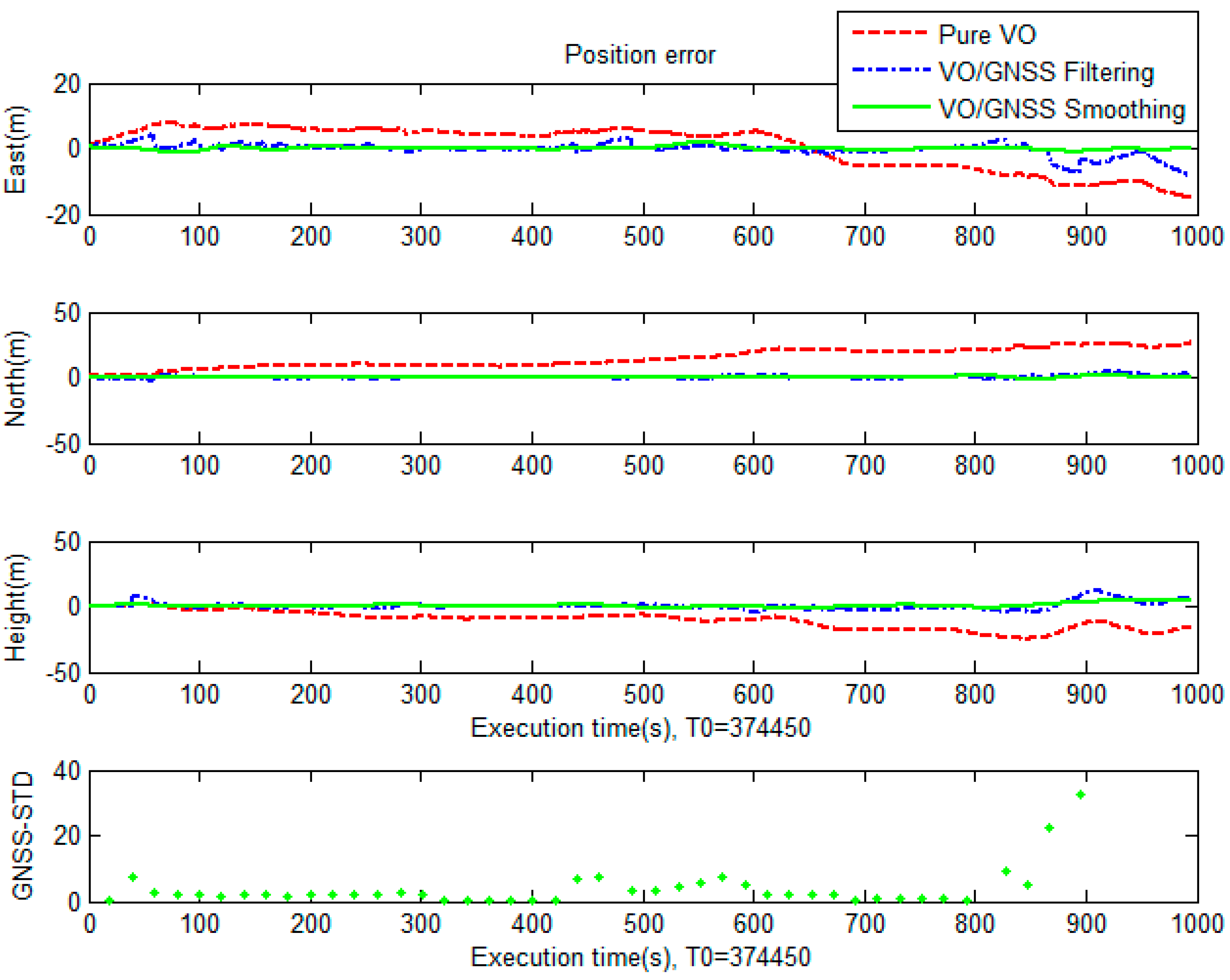
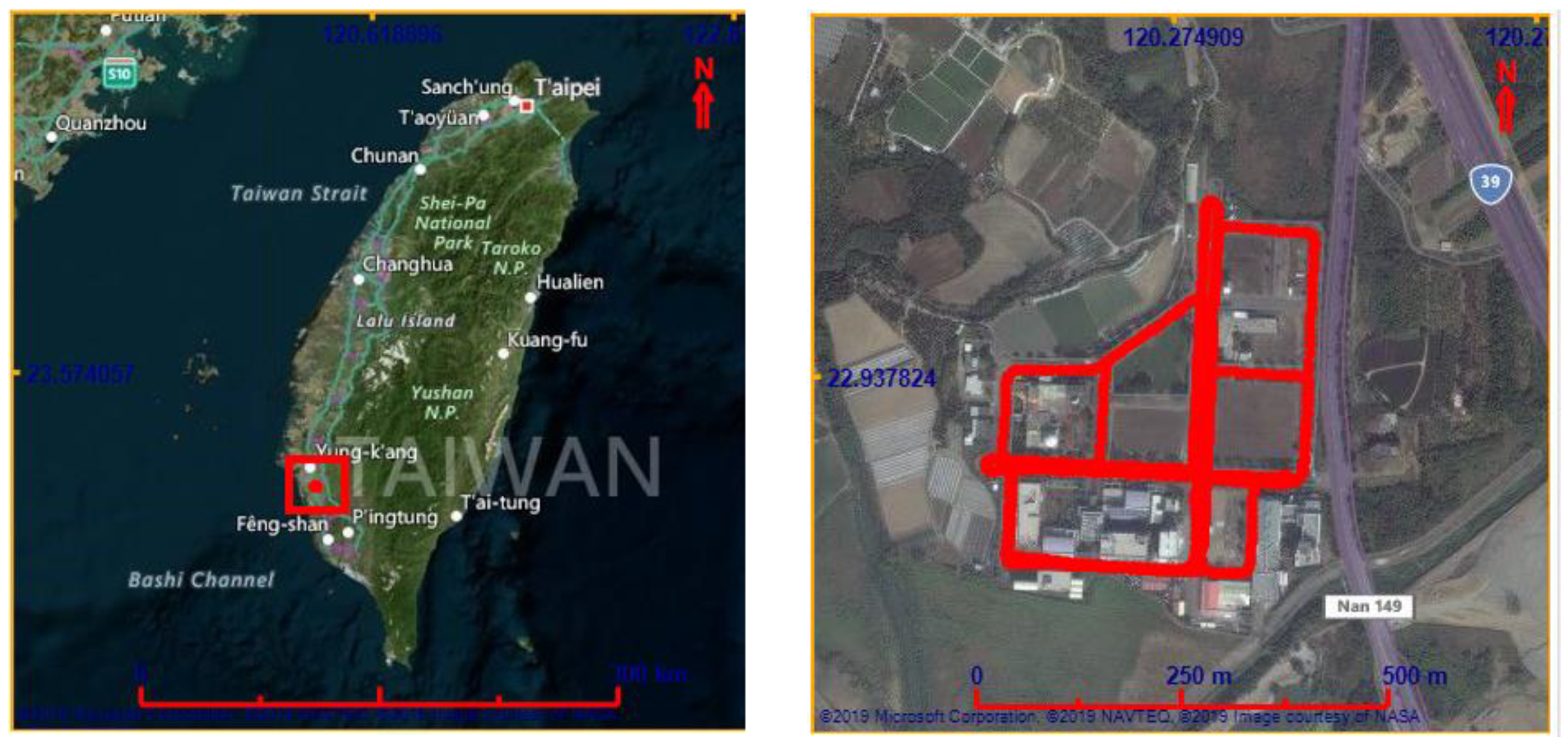
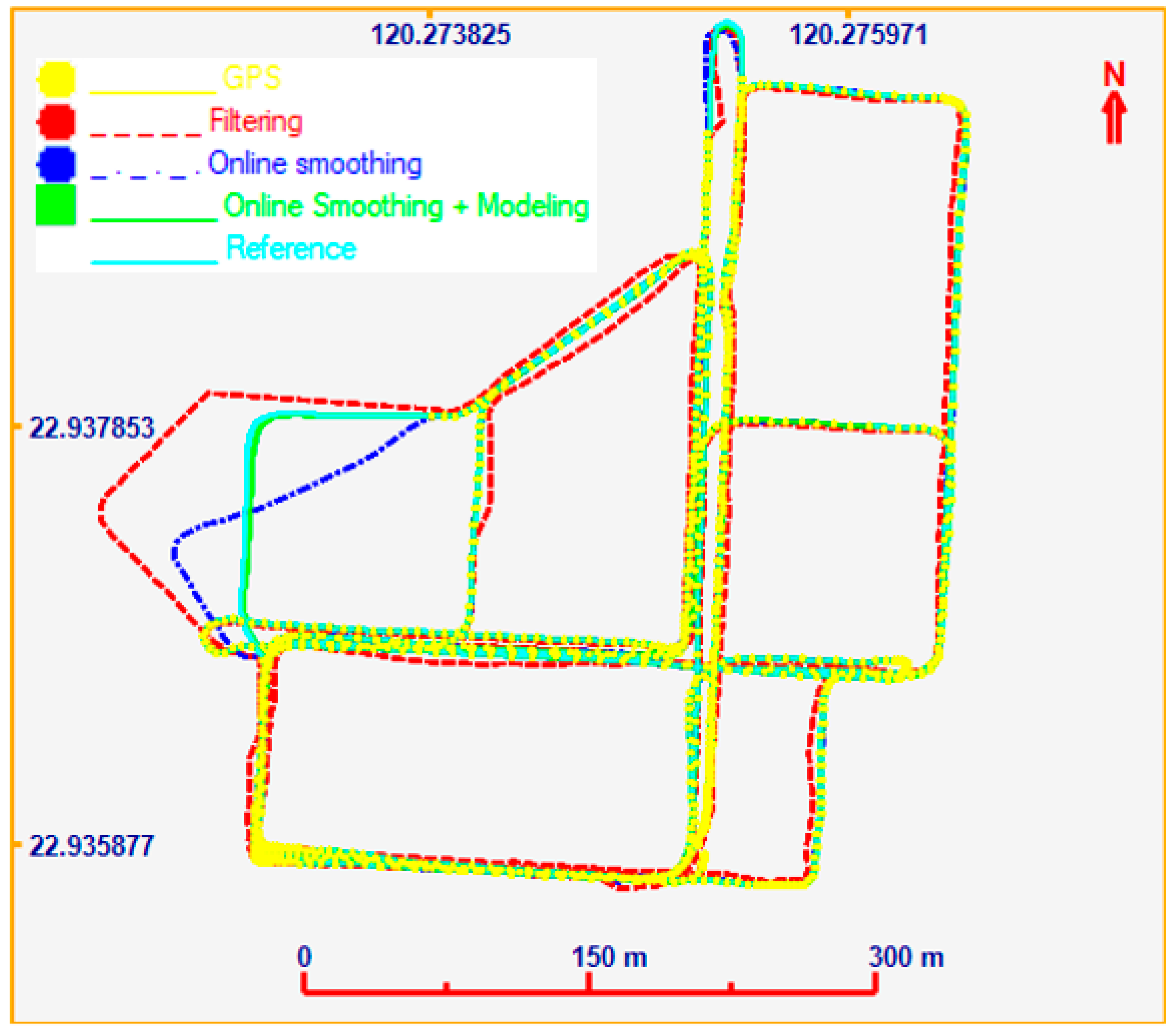
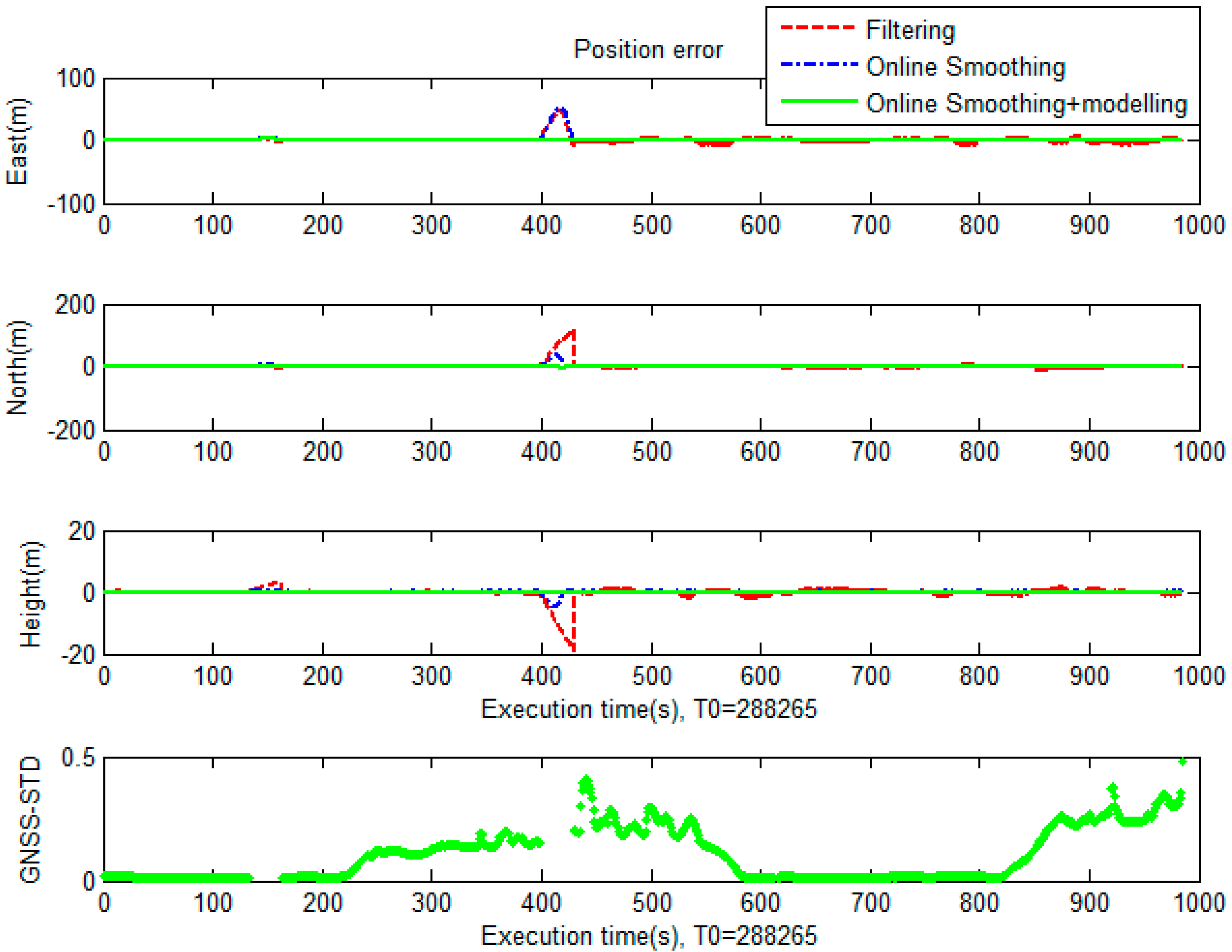
5. Experiment and Discussion
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Chiang, K.-W.; Duong, T.T.; Liao, J.-K. The performance analysis of a real-time integrated INS/GPS vehicle navigation system with abnormal GPS measurement elimination. Sensors 2013, 13, 10599–10622. [Google Scholar] [CrossRef] [PubMed]
- Shin, E.-H. Accuarcy Improvement of Low Cost INS/GPS for Land Applications. Master’s Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AB, Canada, 2001. [Google Scholar]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology; MIT Press: Cambridge, MA, USA, 2004; Volume 17. [Google Scholar]
- Maimone, M.; Cheng, Y.; Matthies, L. Two years of visual odometry on the mars exploration rovers. J. Field Robot. 2007, 24, 169–186. [Google Scholar] [CrossRef]
- Nistér, D.; Naroditsky, O.; Bergen, J. Visual odometry for ground vehicle applications. J. Field Robot. 2006, 23, 3–20. [Google Scholar] [CrossRef]
- Scaramuzza, D.; Fraundorfer, F. Visual odometry, Part 1. IEEE Robot. Autom. Mag. 2011, 18, 80–92. [Google Scholar]
- Aqel, M.O.; Marhaban, M.H.; Saripan, M.I.; Ismail, N.B. Review of visual odometry: Types, approaches, challenges, and applications. SpringerPlus 2016, 5, 1897. [Google Scholar] [CrossRef] [PubMed]
- Tardif, J.-P.; George, M.; Laverne, M.; Kelly, A.; Stentz, A. A new approach to vision-aided inertial navigation in Intelligent Robots and Systems (IROS). In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Dusha, D.; Mejias, L. Error analysis and attitude observability of a monocular GPS/visual odometry integrated navigation filter. Int. J. Robot. Res. 2012, 31, 714–737. [Google Scholar] [CrossRef]
- Schreiber, M.; Königshof, H.; Hellmund, A.M.; Stiller, C. Vehicle localization with tightly coupled GNSS and visual odometry. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016. [Google Scholar]
- Chen, X.; Hu, W.; Zhang, L.; Shi, Z.; Li, M. Integration of low-cost gnss and monocular cameras for simultaneous localization and mapping. Sensors 2018, 18, 2193. [Google Scholar] [CrossRef] [PubMed]
- Howard, A. Real-time stereo visual odometry for autonomous ground vehicles. In Proceedings of the IROS 2008. IEEE/RSJ International Conference in Intelligent Robots and Systems 2008, Nice, France, 22–26 September 2008. [Google Scholar]
- Yousif, K.; Bab-Hadiashar, A.; Hoseinnezhad, R. An overview to visual odometry and visual SLAM: Applications to mobile robotics. Intell. Ind. Syst. 2015, 1, 289–311. [Google Scholar] [CrossRef]
- Bouguet, J.-Y. Matlab Camera Calibration Toolbox. Available online: http://vision.caltech.edu/bouguetj/calib doc (accessed on 25 November 2019).
- Bradski, G.; Kaehler, A. Dr. Dobb’s journal of software tools. OpenCV Libr. 2000, 25, 120. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. and Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Geiger, A.; Moosmann, F.; Car, Ö.; Schuster, B. Automatic camera and range sensor calibration using a single shot. In Proceedings of the 2012 IEEE International Conference in Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar]
- Zhang, J.; Singh, S. Laser–visual–inertial odometry and mapping with high robustness and low drift. J. Field Robot. 2018, 35, 1242–1264. [Google Scholar] [CrossRef]
- Chakraborty, M. Feature Descriptor for Performing Visual Odometry. In Proceedings of the International Conference on Engineering and Technology, Tamilnadu, India, 18–20 April 2013. [Google Scholar]
- Fraundorfer, F.; Scaramuzza, D. Visual odometry, Part 2. IEEE Robot. Autom. Mag. 2012, 19, 78–90. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Longuet-Higgins, H.C. A computer algorithm for reconstructing a scene from two projections. Nature 1981, 293, 133. [Google Scholar] [CrossRef]
- Nistér, D. An efficient solution to the five-point relative pose problem. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 756–770. [Google Scholar] [CrossRef] [PubMed]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Jian, Y.-D.; Chen, C.-S. Two-view motion segmentation with model selection and outlier removal by ransac-enhanced dirichlet process mixture models. Int. J. Comput. Vis. 2010, 88, 489–501. [Google Scholar] [CrossRef]
- Shin, E.-H. Estimation Techniques for Low-Cost Inertial Navigation, in UCGE Report. Ph.D. Dissertation, Department of Geomatics Engineering, University of Calgary, Calgary, AB, Canada, 2005. [Google Scholar]
- Gelb, A. Applied Optimal Estimation; MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Brown, R.G.; Hwang, P.Y. Introduction to Random Signals and Applied Kalman Filtering; Wiley: New York, NY, USA, 1992; Volume 3. [Google Scholar]
- Chiang, K.-W.; Duong, T.; Liao, J.K.; Lai, Y.C.; Chang, C.C.; Cai, J.M.; Huang, S.C. On-line smoothing for an integrated navigation system with low-cost MEMS inertial sensors. Sensors 2012, 12, 17372–17389. [Google Scholar] [CrossRef] [PubMed]
- Rauch, H.E.; Tung, F.; Striebel, C. Maximum likelihood estimates of linear dynamic systems. AIAA J. 1965, 3, 1445–1450. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE (m) | Pure VO | VO/GNSS EKF | VO/GNSS on-line Smoothing |
|---|---|---|---|
| North | 6.689 | 2.054 | 0.522 |
| East | 15.601 | 1.195 | 0.525 |
| Up | 12.933 | 2.933 | 1.454 |
| 3D | 21.34 | 3.775 | 1.632 |
| Improvement (%) | - | 82.3 | 92.4 |
| RMSE (m) | VO/GNSS EKF | On-line Smoothing | On-Line Smoothing and Error Modelling |
|---|---|---|---|
| North | 5.606 | 5.994 | 0.255 |
| East | 12.535 | 3.612 | 0.339 |
| Up | 1.98 | 0.458 | 0.322 |
| 3D | 13.874 | 7.013 | 0.533 |
| Improvement (%) | - | 49.5 | 96.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duong, T.T.; Chiang, K.-W.; Le, D.T. On-line Smoothing and Error Modelling for Integration of GNSS and Visual Odometry. Sensors 2019, 19, 5259. https://doi.org/10.3390/s19235259
Duong TT, Chiang K-W, Le DT. On-line Smoothing and Error Modelling for Integration of GNSS and Visual Odometry. Sensors. 2019; 19(23):5259. https://doi.org/10.3390/s19235259
Chicago/Turabian StyleDuong, Thanh Trung, Kai-Wei Chiang, and Dinh Thuan Le. 2019. "On-line Smoothing and Error Modelling for Integration of GNSS and Visual Odometry" Sensors 19, no. 23: 5259. https://doi.org/10.3390/s19235259
APA StyleDuong, T. T., Chiang, K.-W., & Le, D. T. (2019). On-line Smoothing and Error Modelling for Integration of GNSS and Visual Odometry. Sensors, 19(23), 5259. https://doi.org/10.3390/s19235259