Abstract
This research paper presents a comprehensive comparison between Permanent Magnet Synchronous Motors (PMSMs) and Switched Reluctance Motors (SRMs) in the context of drone applications. The study focuses on motors designed for an output power of 500 watts, with a torque of 0.8 Nm. Simulation results demonstrate that both motor types achieve the specified power rating, exhibiting a torque output of 0.8 Nm. In this comparative analysis, key performance parameters, efficiency, and operational characteristics of PMSM and SRM are systematically evaluated. The study addresses the unique features and challenges associated with each motor type, providing valuable insights for optimizing drone propulsion systems. Additionally, the influence of these motor choices on drone efficiency, weight, and overall performance is discussed. The research contributes to the understanding of motor selection in drone design, offering practical guidance for engineers and researchers involved in unmanned aerial vehicle development. As drone applications continue to diversify, this comparative study aids in making informed decisions regarding motor technologies, balancing power requirements, and maximizing operational efficiency.
1. Introduction
As drones become more popular for different tasks, it is crucial to have motors that make them work well. This study compares two types of motors—Permanent Magnet Synchronous Motors (PMSMs) and Switched Reluctance Motors (SRMs)—to see which one is better for drones [1]. It discusses a practical method to optimize UAV. Based on this, the performance parameters are investigated over a wide range of speeds. The performance parameters, such as power output and efficiency, are optimized.
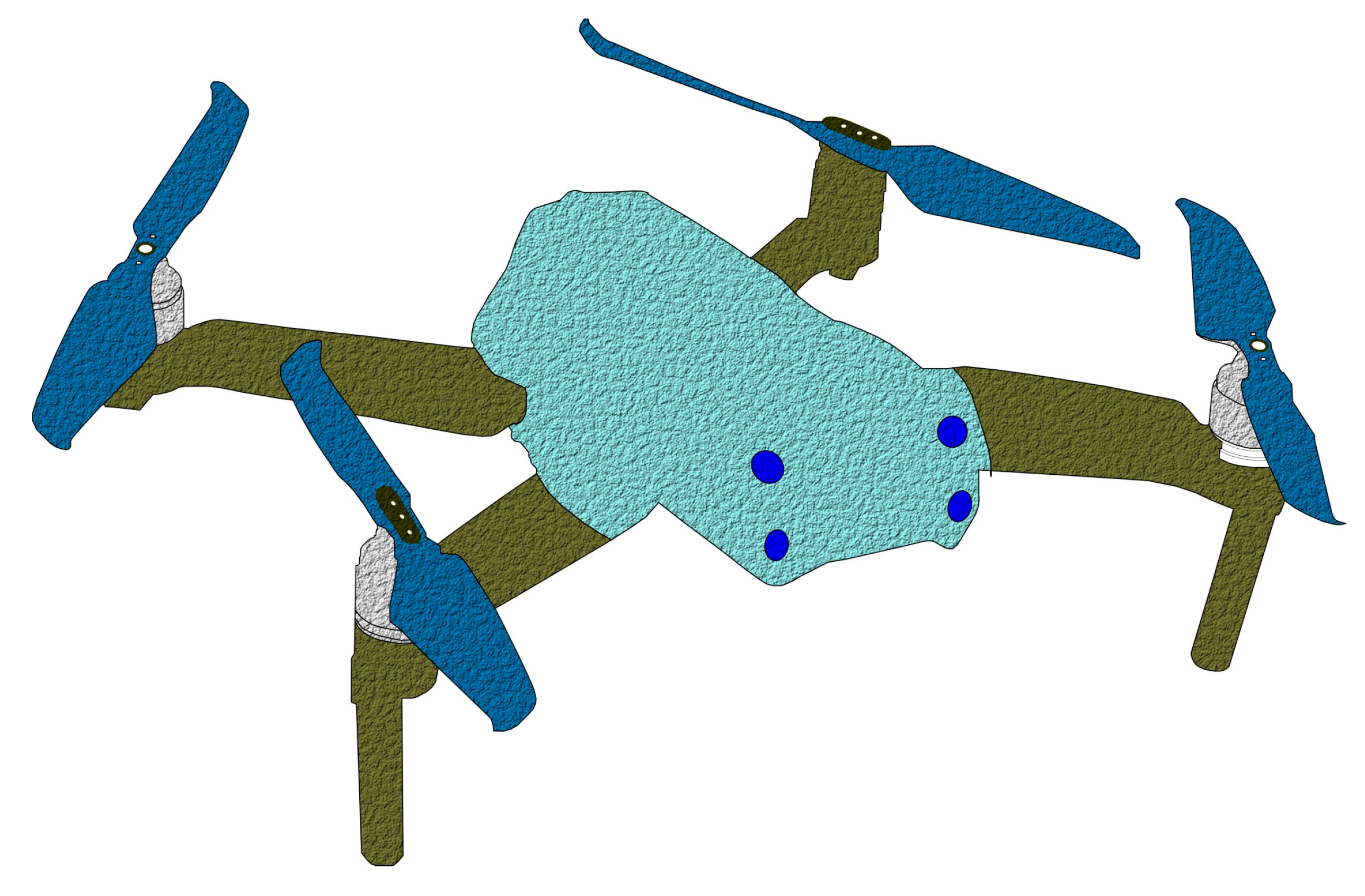
This research carefully examines important aspects like how well the motors perform, their efficiency, and general behavior. By exploring the unique features and challenges of each motor type, the goal is to provide helpful insights for engineers and researchers working on making drones better. The investigation not only evaluates performance but also considers additional aspects; it also analyzes how the choice of motors affects crucial elements like drone functionality, weight, and overall performance. The drone structure is depicted in Figure 1.
Figure 1.
Drone structure.
As drones are used more widely, especially in areas like surveillance, deliveries, farming, and the environment, it is crucial to pick the right motors. This study helps people involved in drone development by giving practical advice on choosing motors. By finding the right balance between power needs and efficiency, the study aims to guide decision-making for those working on drones, making technology better for everyone [2]. The exploration of outer-runner PMSMs with PM surface-mounted rotors and fractional-slot structures optimizes their design using a global Particle Swarm Optimization (PSO) algorithm to reduce costs. The integration of skewed permanent magnets (PMs) and analysis of a four-piece Halbach PM array to mitigate torque ripple is one of the steps to mitigate the disadvantages of PMSMs [3]. Cogging torque serves as a mandatory threat for PM motors. Cao and J. Liu studied the optimization of outer rotor Interior Permanent Magnet Synchronous Motors (IPMSMs) for precision. Two methods proposed to reduce cogging torque are optimizing the flux-barrier shape and introducing rotor slotting. Finite Element Method (FEM) calculations demonstrate a substantial reduction in cogging torque of 66.29% and 25% for each method, respectively, without compromising overall motor performance [4,5,6]. Shubham R. Patel et al. conducted a study to achieve a wide torque/speed range and high reliability, utilizing the advantages of SRM, verification steps through finite element analysis, efficient flux distribution, and mechanical design considerations. They also highlighted a comparative analysis with other motor types for noise reduction in Electric Vehicle (EV) applications [7]. Ref. [8] discusses the optimization and selection of propellers for quadcopters. Thrust and air pressure are precisely estimated. A unique design incorporates two specialized stator poles, designated exclusively for exciting and auxiliary functions. The rotor consists of distinct segments embedded in non-magnetic isolators, and the windings are specifically placed on the exciting stator poles. This setup results in shorter flux paths and the elimination of flux reversal in the stator, which could potentially improve electric utilization and decrease magneto-motive force requirements. Through experimental validation, it is observed that the proposed motor exhibits superior torque output capacity, a 20% reduction in turn numbers, and increased efficiency compared to a conventional 12/8 SRM. This highlights the advantages of the new motor design, showcasing faster response speed and enhanced running stability [9,10]. The outcomes, however, support opportunities for PMSMs and SRMs for drone applications, but still need balancing complications, such as ripple, stability, cost, weight, heat distribution, and control. This thirst for overcoming disturbances led to this study. This study includes the design methodology and its outcomes.
2. Design Methodology
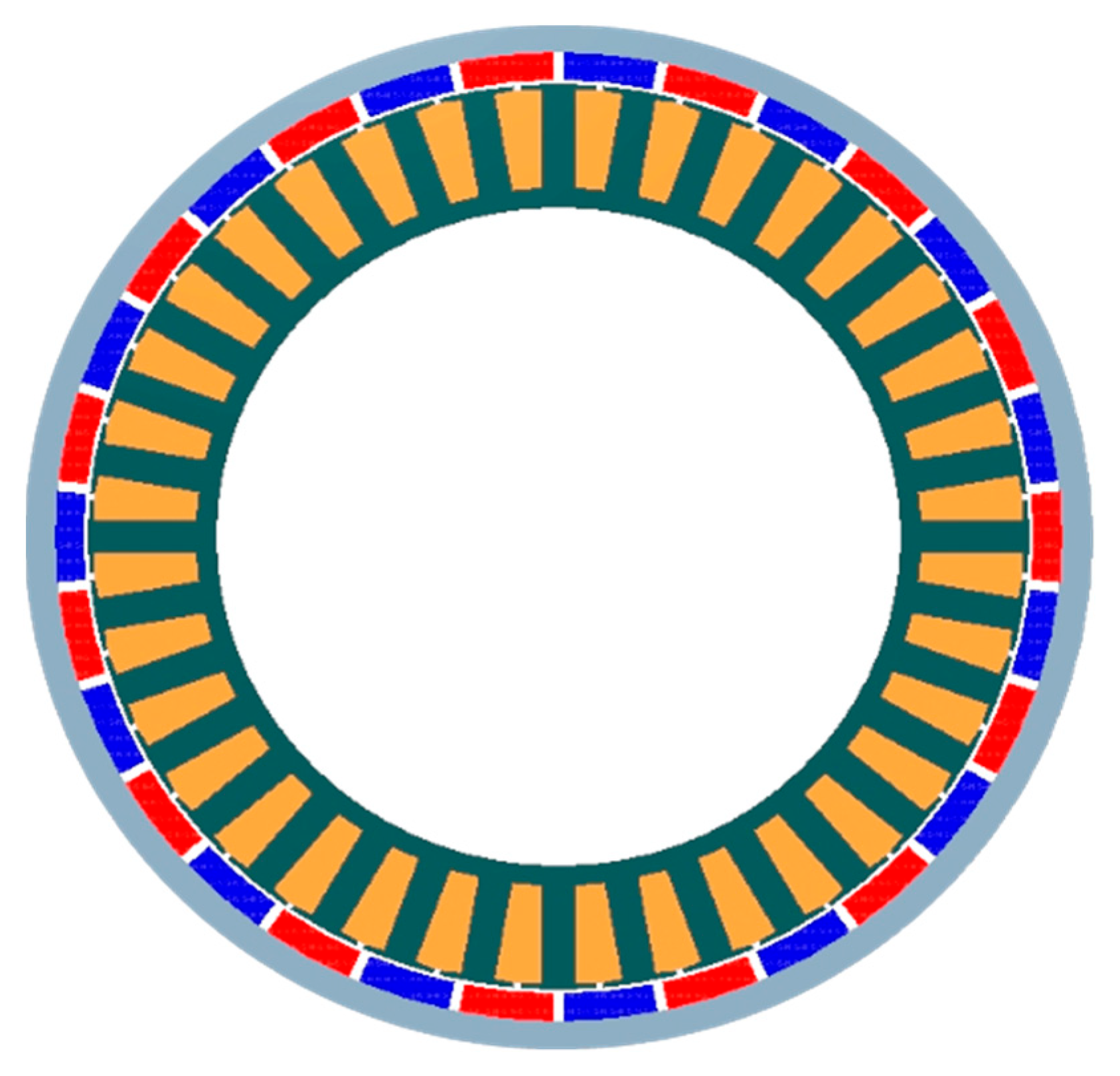
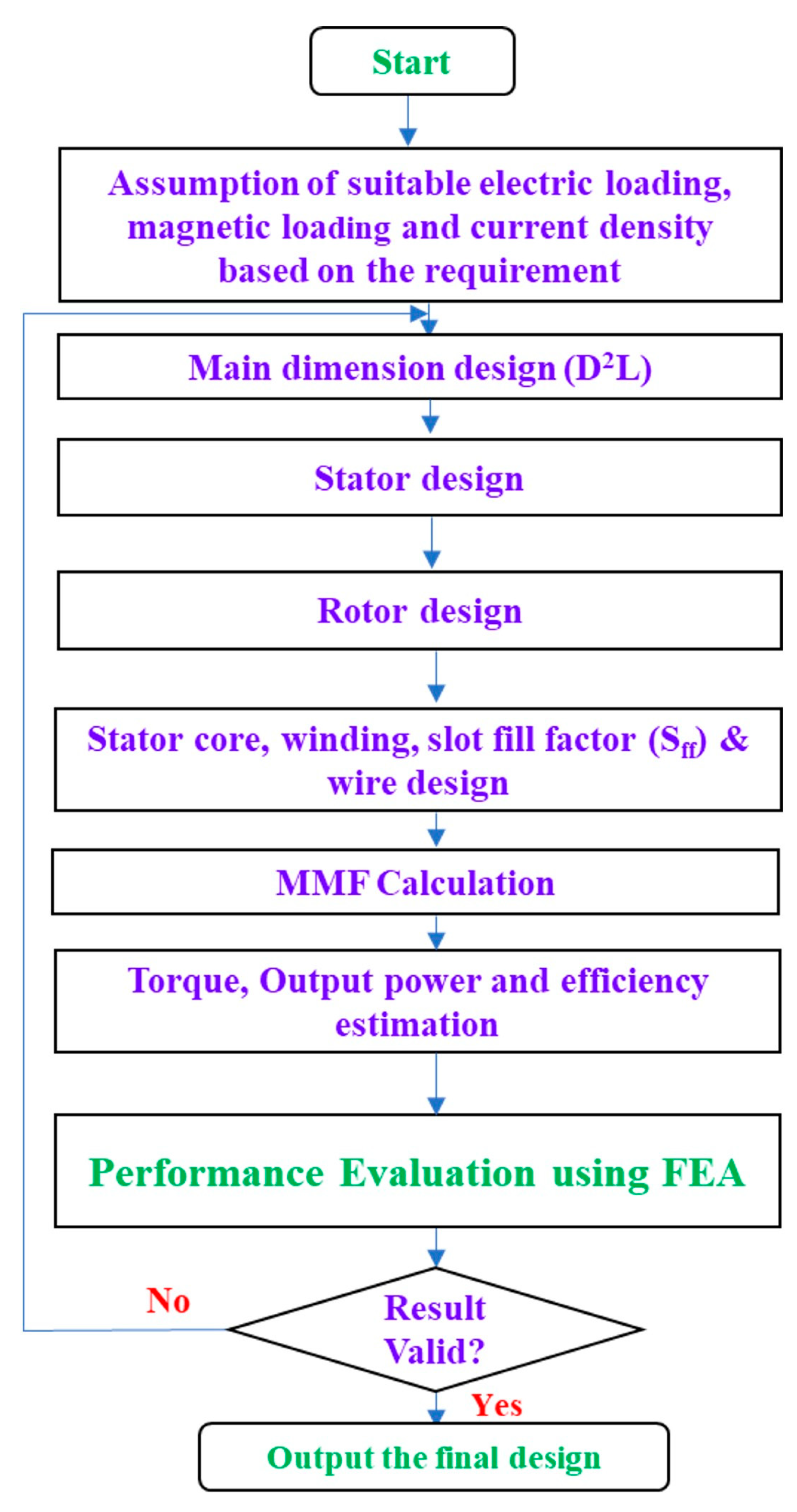
The structures of PMSMs and SRMs are shown in Figure 2 and Figure 3, respectively. The detailed design procedure is elaborated in Figure 4. The design process begins with the selection of suitable electric loading, magnetic loading, and current density based on specific application requirements. Following this, the primary main dimension design, D and L, is determined. Successive steps involve considerations for the stator core, winding, slot fill factor, and wire design. The magneto-motive force (MMF) is then calculated. The design is validated using finite element analysis (FEA). The performance parameters of torque, output power, and efficiency are evaluated. Based on these parameters, the design is either validated or refined until the performance parameters satisfy the application requirements.
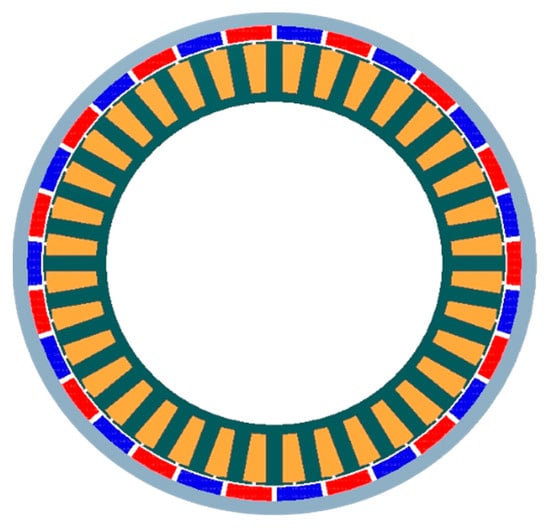
Figure 2.
PMSM cross-section view.
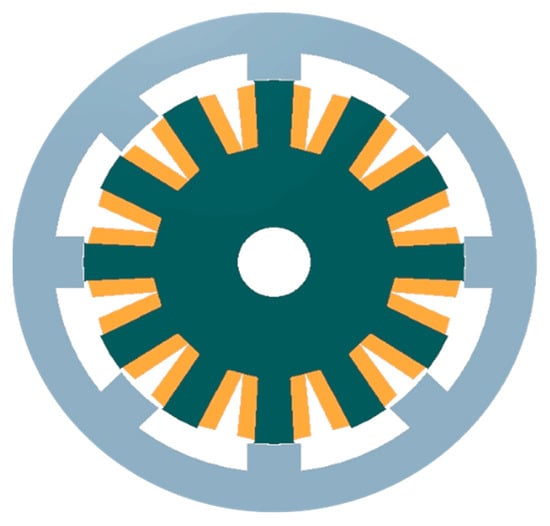
Figure 3.
SRM cross-section view.
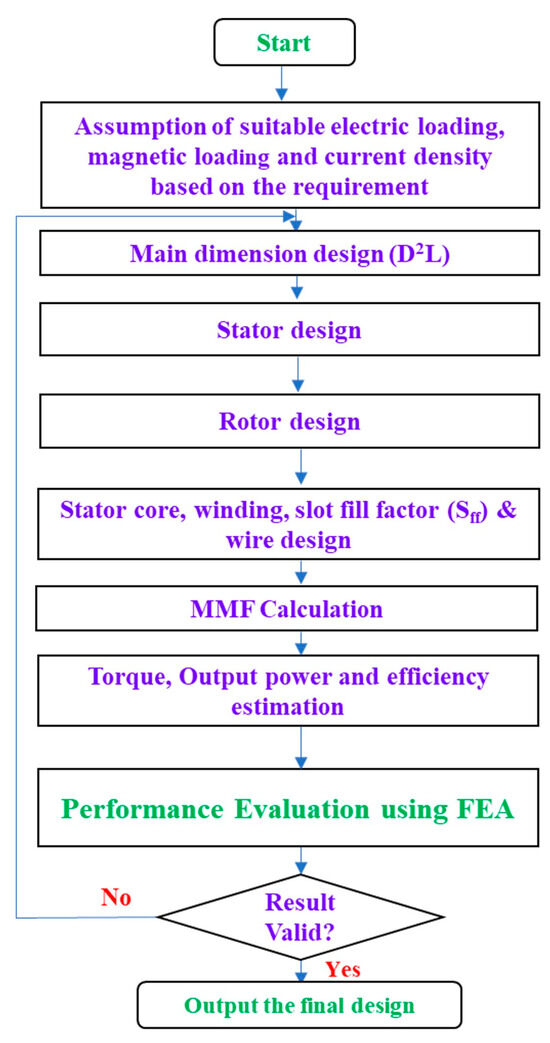
Figure 4.
Design flow chart.
The input parameters are obtained after several iterations following the sizing, and they are tabulated in Table 1.

Table 1.
Input parameters.
3. Results and Discussion
The parameters such as torque, loss, efficiency, mass, and torque ripple are discussed as follows:
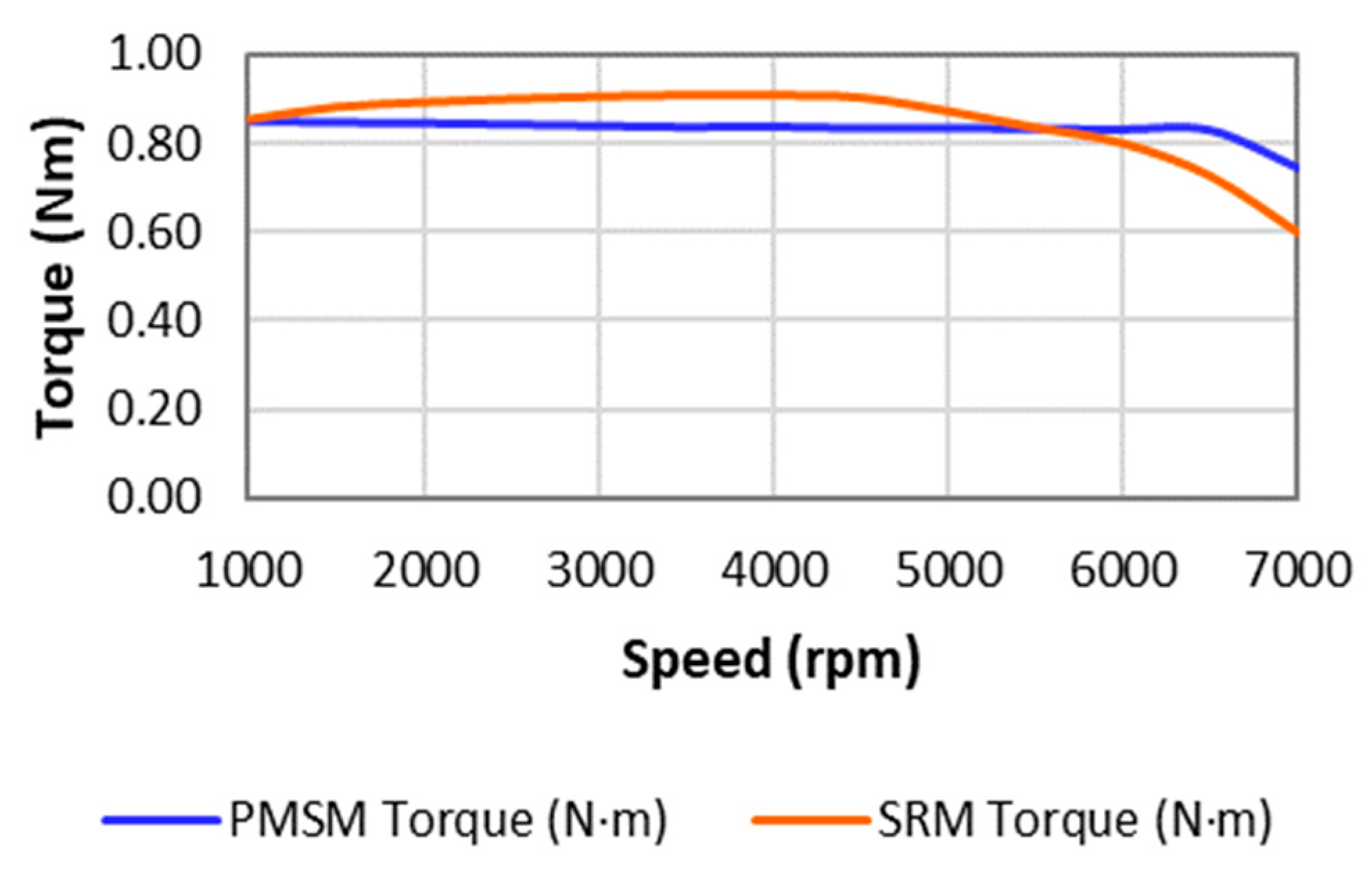
The torque vs. speed characteristics are illustrated in Figure 5. The results reveal that the PMSM exhibits superior torque characteristics.
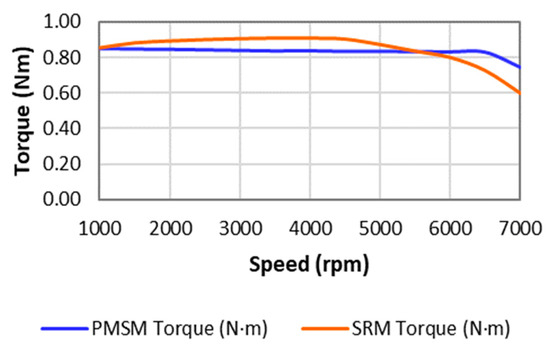
Figure 5.
Rotor speed vs. torque.
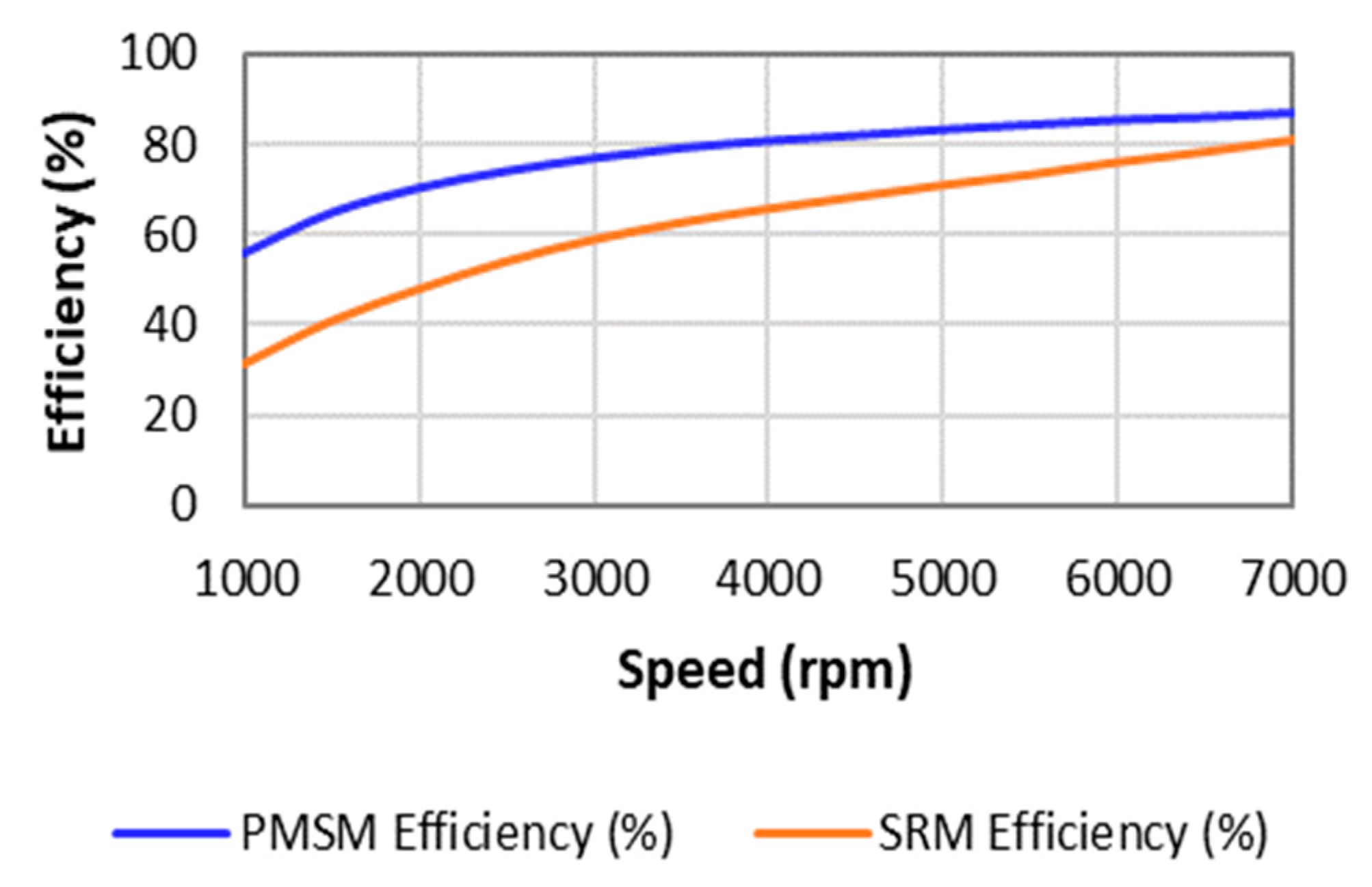
The efficiency graph plotted in Figure 6 illustrates that the PMSM exhibits higher efficiency at different speeds.
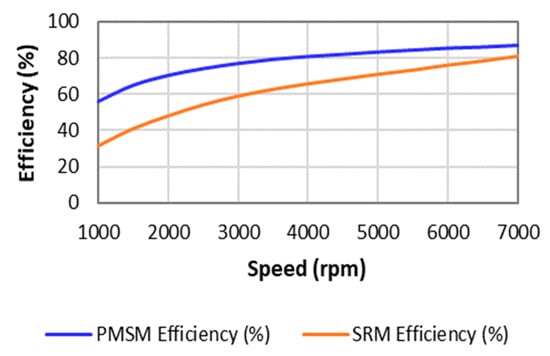
Figure 6.
Rotor speed vs. efficiency.
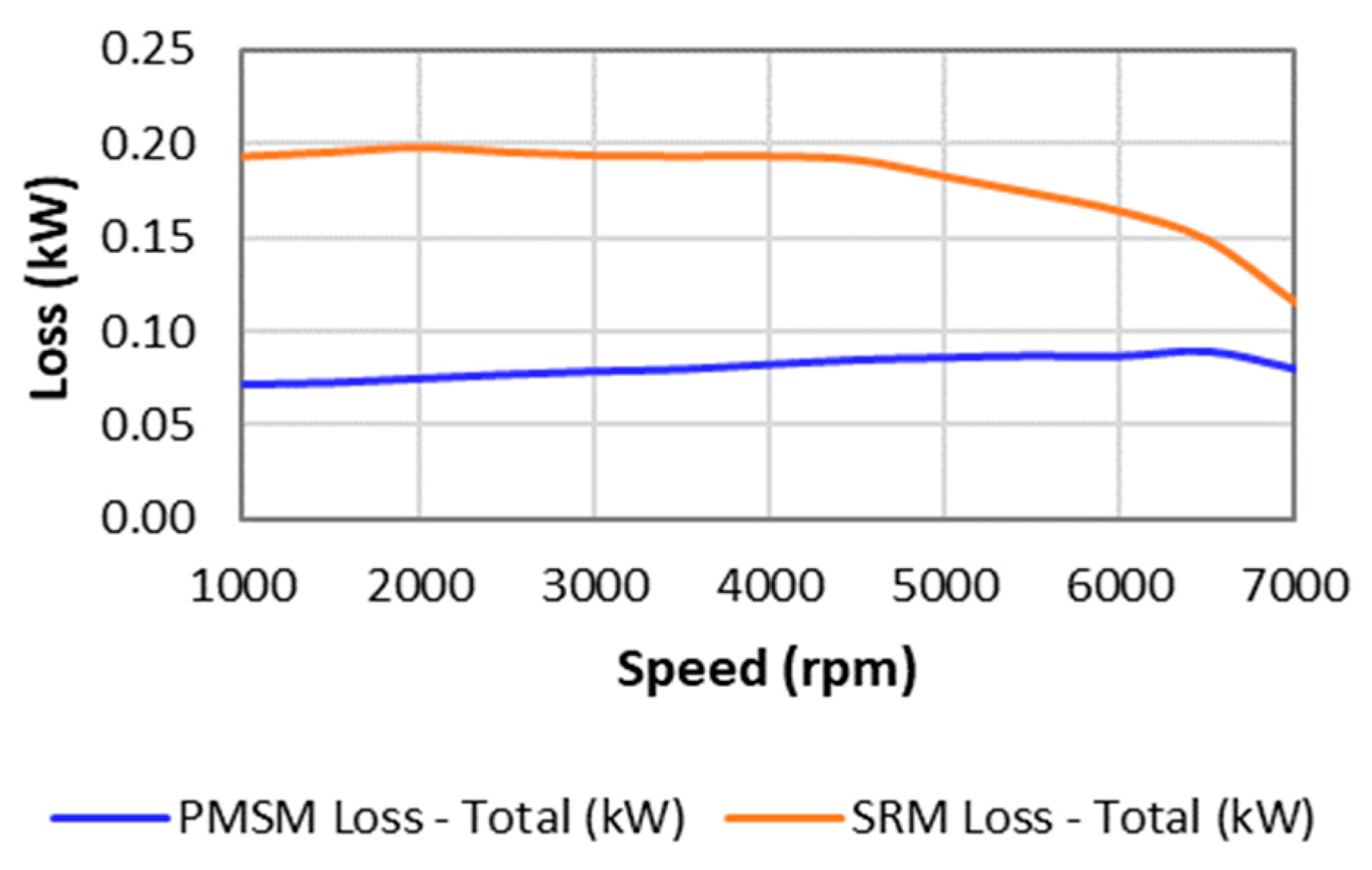
At the rated speed, the loss value of the PMSM is much lower in contrast to the SRM motor. The same illustration is depicted in Figure 7.
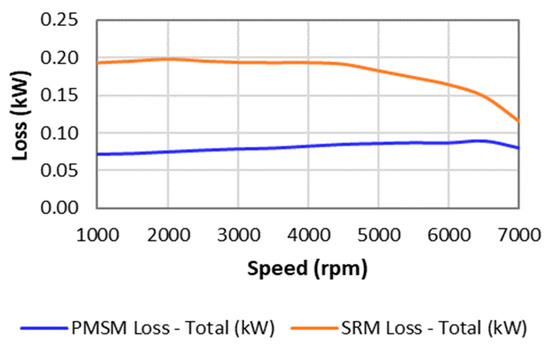
Figure 7.
Rotor speed vs. loss.
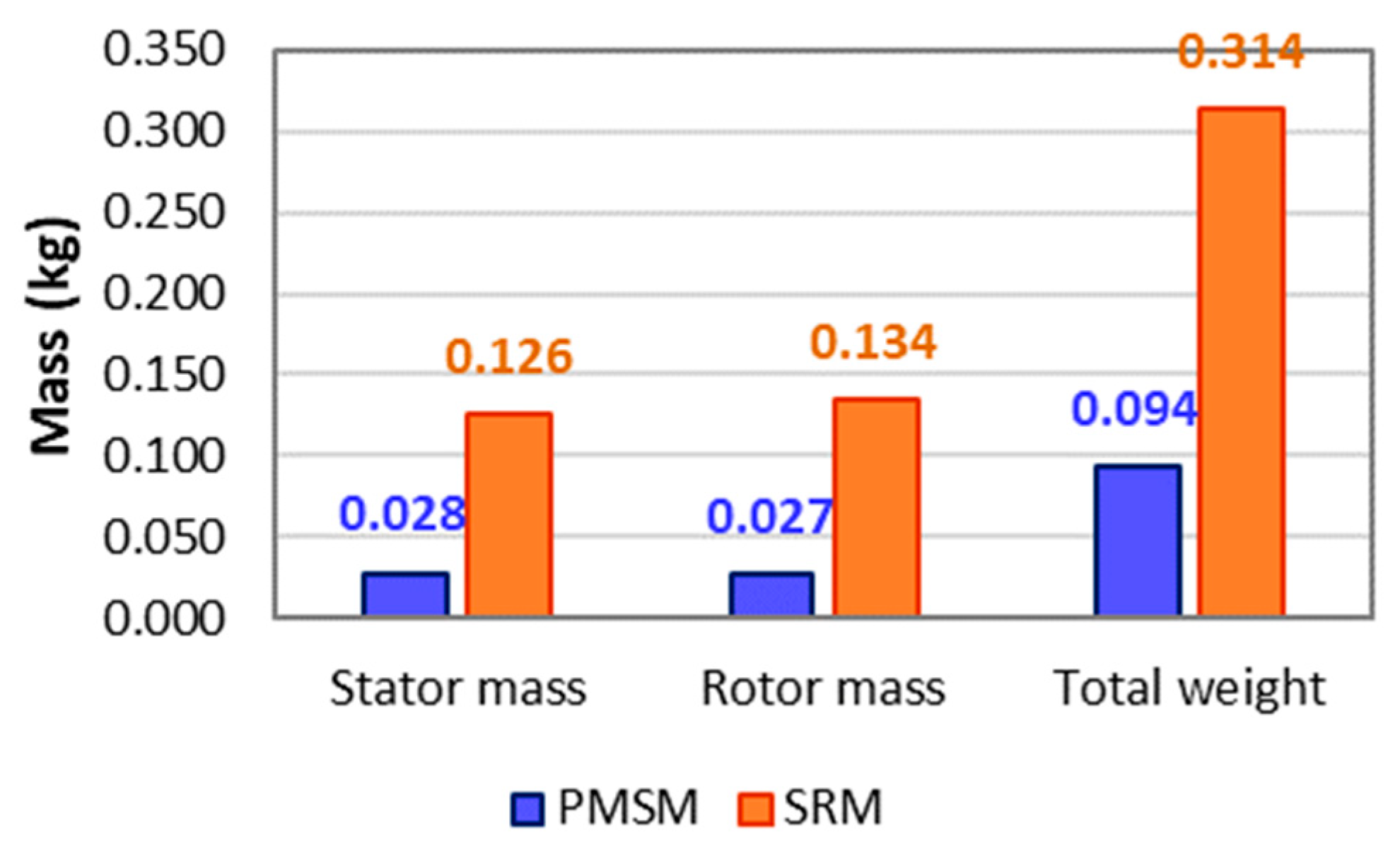
The mass of different segments depicted in Figure 8 indicates that the PMSM exhibits higher torque density.
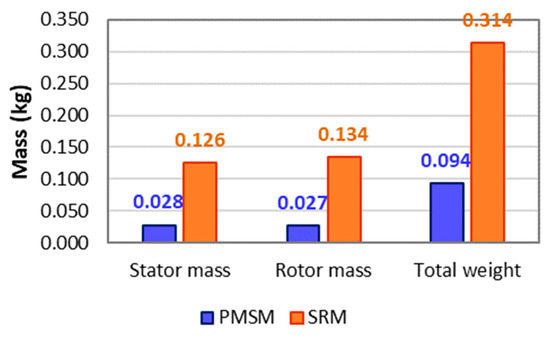
Figure 8.
Weight details.
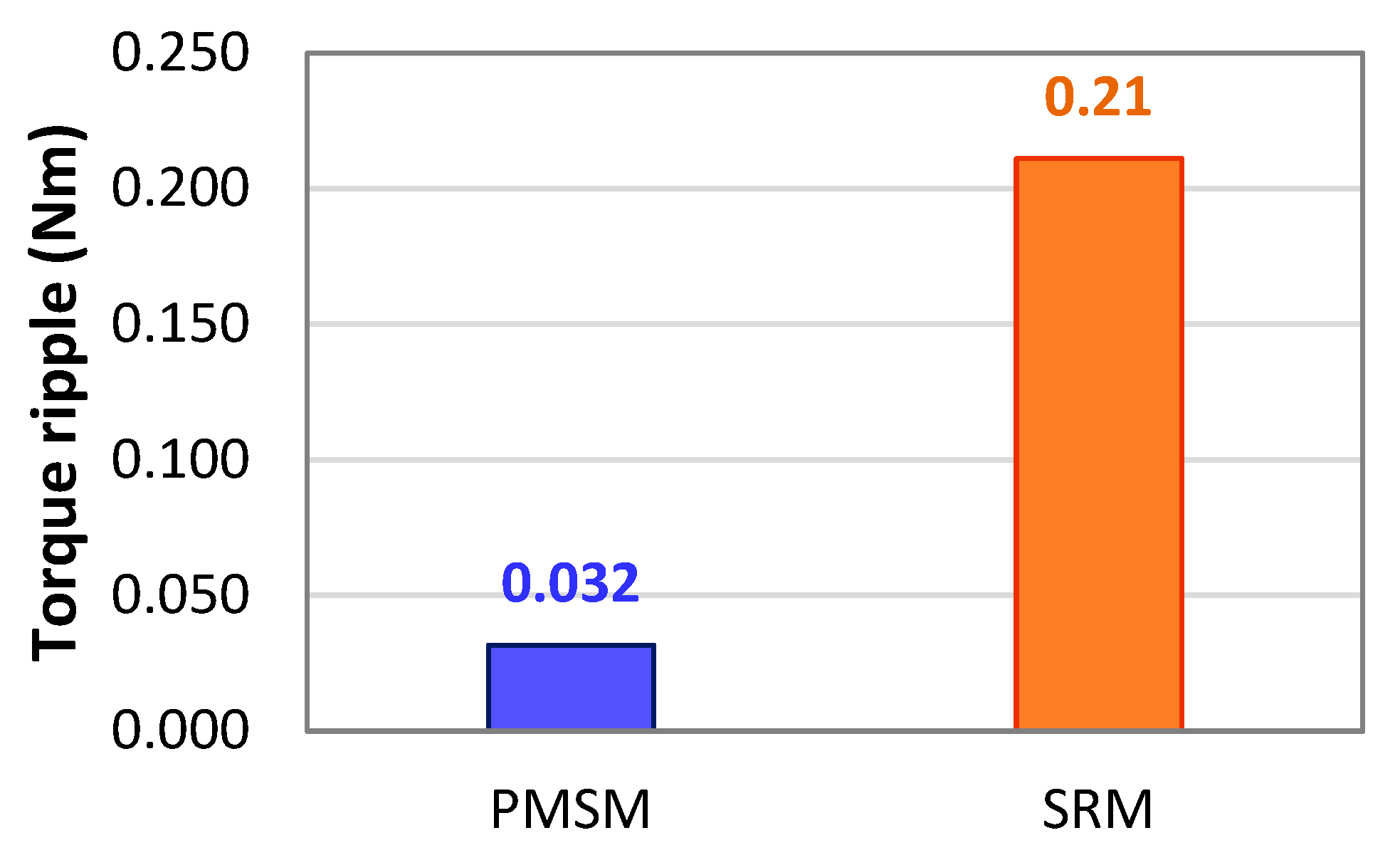
The torque ripple in the PMSM is less in comparison with the SRM, as depicted in Figure 9.
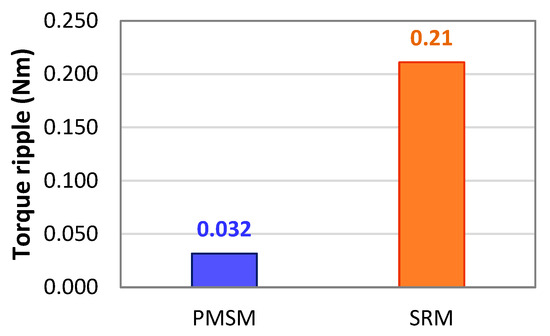
Figure 9.
Torque ripple characteristics at rated speed.
Table 2 discusses the PMSM performance parameters. It is evident that the designed PMSM satisfies the torque requirement for the chosen application. The efficiency of the motor is 85.71% at a speed of 6000 rpm.
Table 2.
PMSM performance parameters.
The performance parameters with respect to SRM are tabulated in Table 3. The results indicate that the design meets the torque requirement. However, the efficiency of the SRM is 76.37%, compared to the 86% exhibited by the PMSM.
Table 3.
SRM performance parameters.
4. Conclusions
In drone applications, the demand for an efficient and high-power-density motor is paramount, aiming to deliver the required torque while ensuring optimal size. This work elaborates on the design procedure for PMSMs and SRMs for drone applications. The designed motor satisfies the torque requirement of 0.8 Nm. A comparative study of different performance parameters with respect to PMSMs and SRMs is presented to highlight their characteristics. The results reveal that the designed PMSM offers better performance in comparison with the SRM. PMSM exhibits superior torque characteristics with high efficiency and lower torque ripple. Further work will focus on the improved design and comprehensive analysis of SRM for unmanned aerial vehicles.
5. Future Work
The following tasks are to be executed:
- Selection of materials.
- Study of thermal and mechanical aspects.
- Suggestion of suitable control techniques.
- Hardware development.
Author Contributions
Conceptualization, S.T.V.; methodology, M.B.; software, S.T.V.; validation, S.P.; visualization, S.P.; investigation, S.P.; resources, M.B.; writing—original draft preparation, M.B.; writing—review and editing, M.B.; supervision, M.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Acknowledgments
The authors would like to acknowledge the management of SSN College of Engineering for the support.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Etewa, M.; Hassan, A.F.; Safwat, E.; Abozied, M.A.H.; El-Khatib, M.M.; Ramirez-Serrano, A. Performance Estimation of Fixed-Wing UAV Propulsion Systems. Drones 2024, 8, 424. [Google Scholar] [CrossRef]
- Wang, M.; Chen, Z. Research on Permanent Magnet Structure of Permanent Magnet Synchronous Motor for Electric Vehicle. In Proceedings of the 2nd International Conference on Electrical Engineering and Control Science (IC2ECS), Nanjing, China, 16–18 December 2022; pp. 990–993. [Google Scholar]
- Zhao, L.; Yang, M.; He, Z.; Ma, J.; Lu, Q. Optimization Design of Outer-rotor Permanent Magnet Synchronous Motor. In Proceedings of the 2021 Sixteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 5–7 May 2021; pp. 1–5. [Google Scholar]
- Garip, S.; Yasa, Y. Design of Outer Runner-Type Brushless Permanent Magnet DC Motor for Lightweight E-Vehicles. In Proceedings of the 2020 6th International Conference on Electric Power and Energy Conversion Systems (EPECS), Istanbul, Turkey, 5–7 October 2020; pp. 151–156. [Google Scholar]
- Cao, Z.; Liu, J. Cogging Torque Reduction for Outer Rotor Interior Permanent Magnet Synchronous Motor. In Proceedings of the IECON 2020—The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 2689–2693. [Google Scholar]
- Xie, Y.; Fu, L.; Ma, Z. Design and Research of Low-Speed High-Torque Permanent Magnet Synchronous Motor with Outer Rotor. In Proceedings of the 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar]
- Wang, X.; Zhang, Z.; Gao, P.; Lu, H.; He, X. Design and Simulation Analysis of a Novel Outer Rotor IPM Motor Used in Electric Vehicles. In Proceedings of the 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 1413–1418. [Google Scholar]
- Kuantama, E.; Craciun, D.; Tarca, I.; Tarca, R. Quadcopter Propeller Design and Performance Analysis. In New Advances in Mechanisms, Mechanical Transmissions and Robotics; Corves, B., Lovasz, E.C., Hüsing, M., Maniu, I., Gruescu, C., Eds.; Mechanisms and Machine Science; Springer: Cham, Switzerland, 2017; Volume 46, pp. 269–277. [Google Scholar]
- Patel, S.R.; Gandhi, N.; Chaithanya, N.; Chaudhari, B.N.; Nirgude, A. Design and development of Switched Reluctance Motor for electric vehicle application. In Proceedings of the 2016 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Trivandrum, India, 14–17 December 2016; pp. 1–6. [Google Scholar]
- Xu, Z.; Jeong, K.-I.; Lee, D.-H.; Ahn, J.-W. Preliminary Performance Evaluation of a Novel 12/8 Segmental Rotor Type SRM. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–5. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).