Abstract
This work was devoted to the optimization of the trajectory of a robotic system for aliquoting biosamples, consisting of serial and parallel manipulators. The optimization consisted of two stages. At the first stage, we considered the optimization constraints associated with the workspace, taking into account the ranges of permissible values of the angles of the drive rotational joints, the link interference, and the singularities. The workspace in the space of input and output coordinates was represented as a partially ordered set of integers. At the second stage, constraints were formed related to the objects in the workspace during the aliquoting process, such as the body of the robotic system, test tubes, and racks. The condition for excluding collisions of the manipulator with other objects was provided by the geometric decomposition of objects and the exclusion of areas corresponding to external objects from the set describing the workspace of the manipulator. Optimization was performed in the space of input coordinates. The objective function was proportional to the duration of movement along the trajectory. The possibility of applying evolutionary algorithms to solve this problem is analyzed. An assessment of the performance is given. The optimization and export of the resulting trajectory were implemented in software, which enabled verification of the optimization results on a virtual model. The simulation results are presented.
1. Introduction
When automating technological processes in a wide range of industries, trajectory planning tasks are very important. The boundaries of the workspace, singularities, and intersections of robot links can be considered as obstacles. Currently, there are various methods for trajectory planning. Some methods are based on the spatial decomposition into geometric shapes of various shapes [1,2]. Discrete search methods allow using heuristic estimates of the perspective of the trajectories, speeding up the solution of trajectory planning problems [3]. An important family of motion planning methods consists of potential field methods, originally developed for mobile robot navigation and real-time obstacle avoidance [4]. Sampling methods allow us to solve problems of planning the trajectory of movement with a high level of complexity, for spaces with a large number of obstacles and mechanisms with a significant number of degrees of freedom [5]. The Probabilistic Roadmap Method [6] is widely applied to solve path finding problems in both local and global settings. One of the ways to reduce the number of vertices in a graph is the method of constructing randomized route networks based on scopes [7]. There are also currently a number of efficient stochastic methods that can be applied to the trajectory planning of manipulators [8,9].
The application of evolutionary algorithms makes it possible to solve optimization problems, including planning a trajectory with high-performance indicators. In this regard, within the framework of this paper, an original approach is proposed based on the application of evolutionary algorithms to find the optimal trajectory inside the workspace of robots, taking into account the singularities, intersections of links, and the constraints on the drive coordinates. The optimization problem is solved using the example of a delta robot, which can be applied for a wide range of tasks, including biometric aliquoting [10]. During this task, it becomes necessary to avoid obstacles such as test tubes and racks.
2. Setting an Optimization Problem
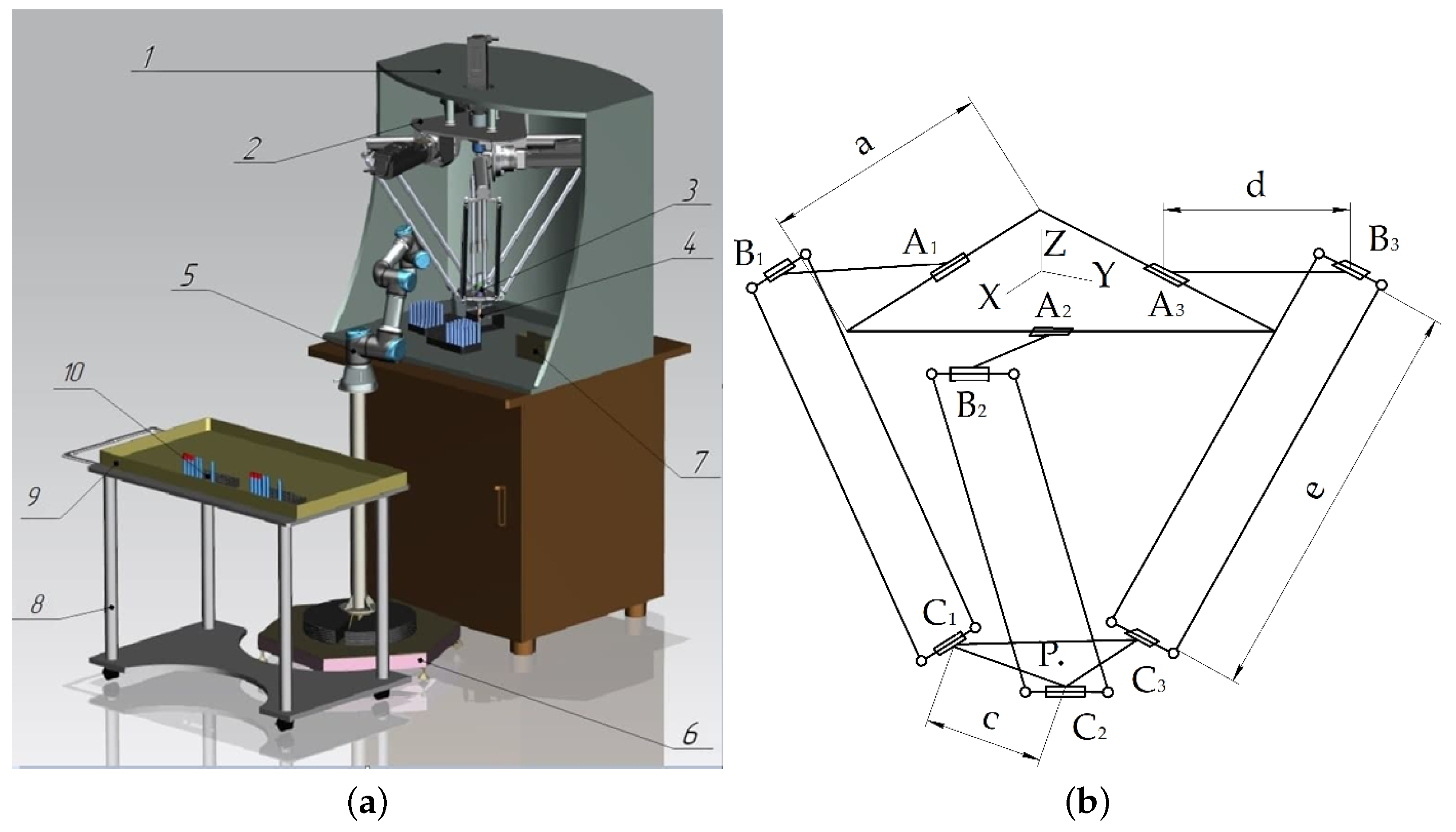
The delta robot (Figure 1b) included in the robotic system for biomaterial aliquoting (Figure 1a) has three degrees of freedom and includes three kinematic chains RUU. In each of the chains, the drive rotary joint is used to connect to the base. Universal joints are used to connect to the moving platform. Universal joints are used to connect two links to each other. The end-effector is the center P of the mobile platform.
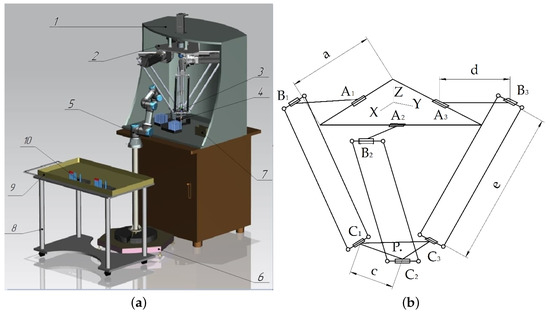
Figure 1.
The Robotic system: (a) A 3D model: 1—body, 2—DeLi manipulator, 3—dispensing head, 4—dispenser tip, 5—robot manipulator, 6—base of the robot manipulator, 7—workspace, 8—trolley, 9—tray for consumables, 10—rack with test tubes, and (b) the delta-robot structure.
The delta robot can move relatively freely along a certain arbitrary trajectory, taking into account the limitations determined by the workspace and the singularities and intersections of the robot links. The duration of the robot movement should be minimized as much as possible. Since the duration of the movement in time is determined by the duration of the operation of the robot drives required for the corresponding movement, it is advisable to optimize the trajectory in the space of input coordinates. So, for a delta robot, the input coordinates are the angles of rotation of the drive rotary joints . An arbitrary trajectory can be represented as a set of movements (steps) in the space of input coordinates. As a criterion function, we used a function based on the Chebyshev metric, as well as the Euclidean metric, taken with some small weight coefficient [11]:
Optimization should be carried out within the constraints on the size of the workspace. In the framework of previous works, the authors proposed to use the representation of the workspace in the form of a partially ordered set of integers A [12]. Therefore, checking the opt-in constraint consisted of two steps.
2.1. The First Stage: Definition of the Set B of the Trajectory Coordinates in the Space of Integers
For this purpose, an algorithm was modified from Bresenham’s algorithm [13], which assumes that the trajectory is represented as a polyline consisting of many segments. In this case, the coordinates must correspond to the covering set of the workspace, represented as a partially ordered set of integers; they must be obtained taking into account the accuracy of the approximation and the displacement along the j coordinate axes by the formula
2.2. The Second Stage: Determination of Whether the Resulting Set B A Belongs to the Workspace Set A
Thus, the optimization constraint condition has the form
where n is the number of segments that make up the trajectory.
Thus, the optimization problem looked like this.
- -
- Parameters: the coordinates of the intermediate points of the trajectory . For a delta robot, the coordinates are the rotation angles of the drive rotary joints, i.e., .
- -
- Parameter change range: the overall dimensions of the workspace in the space of input coordinates .
- -
- Criterion: the function F calculated by formula (1).
- -
- Constraint: condition (3).
To increase the efficiency of the optimization in the presence of obstacles, we transferred the optimization constraint to the criterion function
where , are the penalty coefficient, and is the Heaviside function:
We used the Genetic algorithm (GA), Particle Swarm Optimization (PSO), and Grey Wolf Optimization (GWO) to solve the optimization problem.
3. Numerical Results
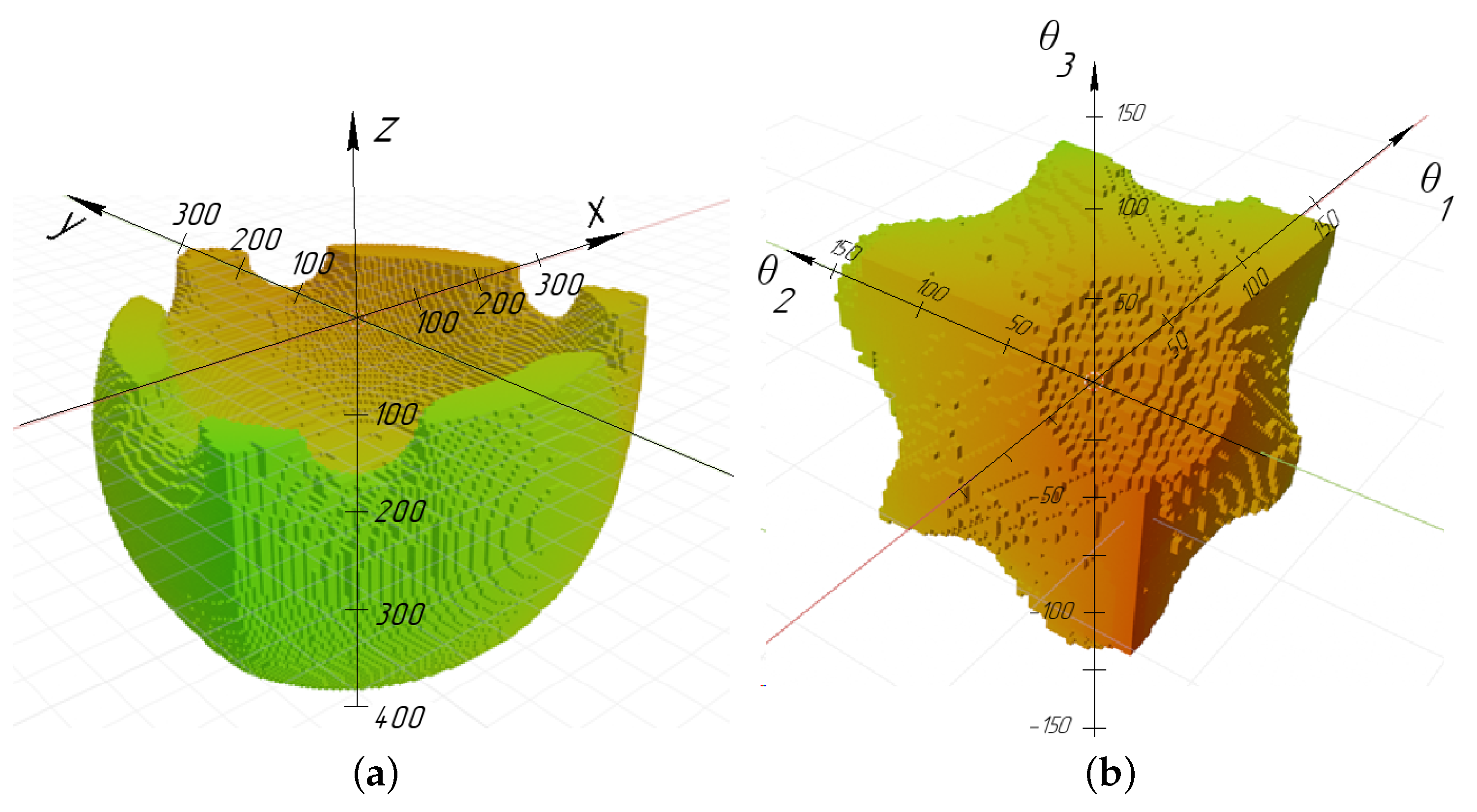
The workspace of the delta robot is limited by the range of permissible rotation angles in the hinges, the area of sign constancy, the Jacobian, and the condition that there are no intersections of links. The problem of determining the workspace for a delta robot in the space of output coordinates was considered by the authors in [10]. Figure 2 shows the results for the following delta robot parameters: a = 600 mm, c = 100 mm, d = 350 mm, e = 800 mm, and .
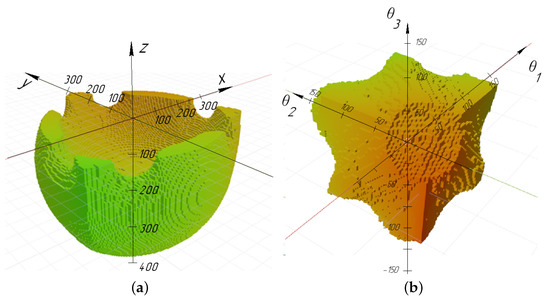
Figure 2.
Workspace virtual model of the delta robot: (a) in (x, y, z) coordinates and (b) in coordinates .
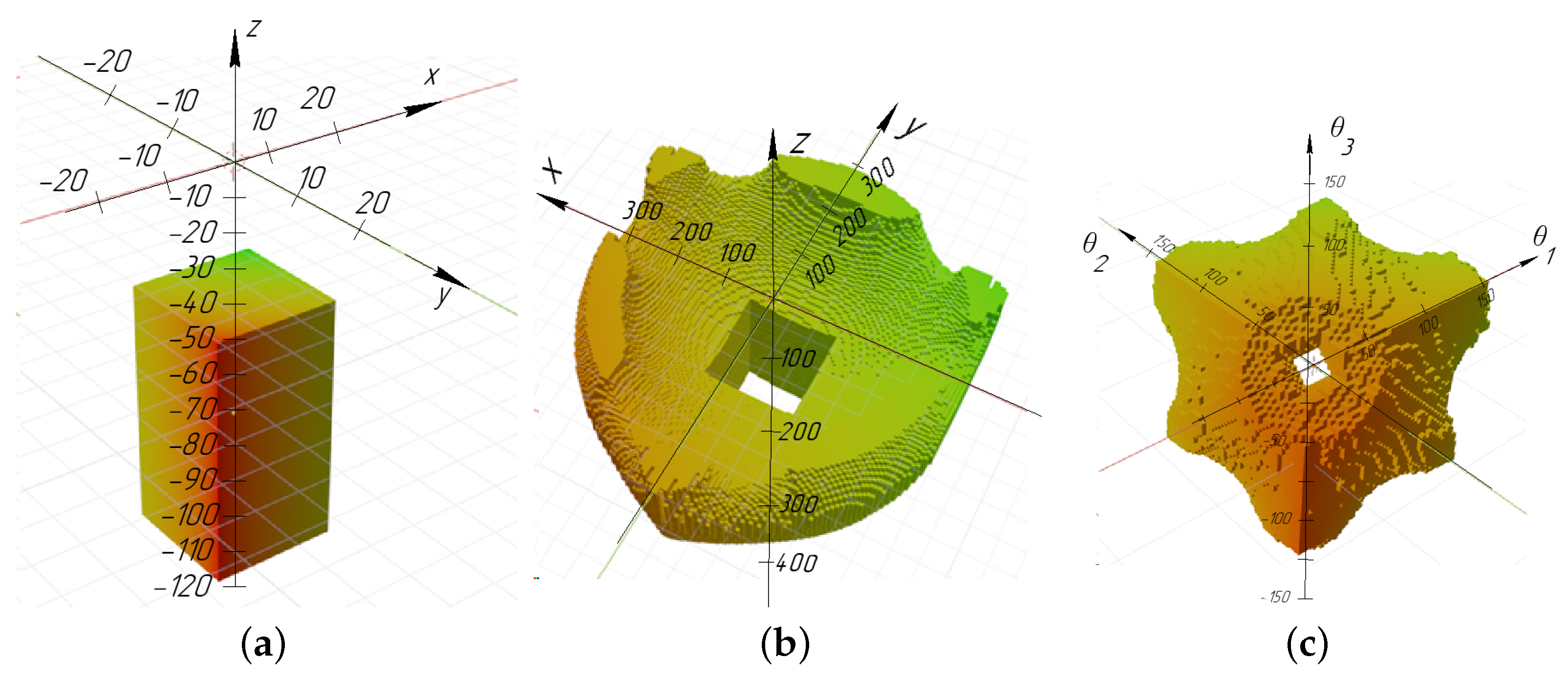
An object was added as an obstacle with a parallelepiped shape (Figure 3a). The updated workspace virtual models are shown in Figure 3b,c.
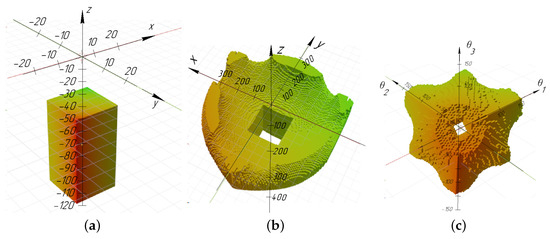
Figure 3.
Additional boundaries, related to the overall dimensions of the obstacle: (a) obstacle C; (b) set Bp with obstacle C; (c) set with obstacle C.
We performed trajectory optimization inside the workspace of a delta robot. A C++ software package was developed for this purpose. Parallel computing was implemented using the OpenMP library. Visualization was performed by exporting an ordered set of integers describing the workspace in STL format and arrays of co-ordinates of trajectory points in JSON format, and then importing thedata in the Blender software package using developed Python scripts. We set the following starting and ending points of the trajectory in the output coordinate space: mm, mm, mm, mm, mm, and mm, and the number of vertices of the trajectory . Accordingly, the number of optimization parameters . The weight coefficient , the penalty coefficients , .
The parameters of the GA algorithm were the number of individuals in the initial population , the number of generations , the number of crosses at each iteration , the number of possible values of each of the parameters , and the probability of mutation .
The parameters of the GWO algorithm were , , and the number of new individuals at each iteration = 1000.
The parameters of the PSO algorithm were , , the number of groups G = 2, and the values of free parameters = 0.7, = 1.4, and = 1.4.
The optimization for each of the tests was performed in four stages. At the first stage, the range of parameters was changed to the ranges corresponding to the overall dimensions of the workspace for each of the coordinates. The parameter ranges at each subsequent stage were reduced by a factor of . At the same time, the center of the ranges corresponded to the best result obtained at the previous stage. The optimization results are shown in Table 1. The GA algorithm showed the best average value of the criterion function.

Table 1.
Results table, mm.
To justify the feasibility of using the criterial modified Chebyshev metric as a criterion function, we analyzed the values of the trajectory length for various metrics and the criterion function for one of the tests. Table 2 shows the results of the trajectory optimization for Test 3. The table shows that despite the fact that the trajectory obtained as a result of the PSO optimization by the algorithm was 0.2% shorter in length than the trajectory obtained by the GA algorithm, the length in accordance with the Chebyshev metric and, accordingly, the positioning duration for the PSO trajectory was 14% longer. We can conclude that it is advisable to apply the Chebyshev metric when planning a trajectory.
Table 2.
Trajectory optimization results for Test 3, mm.
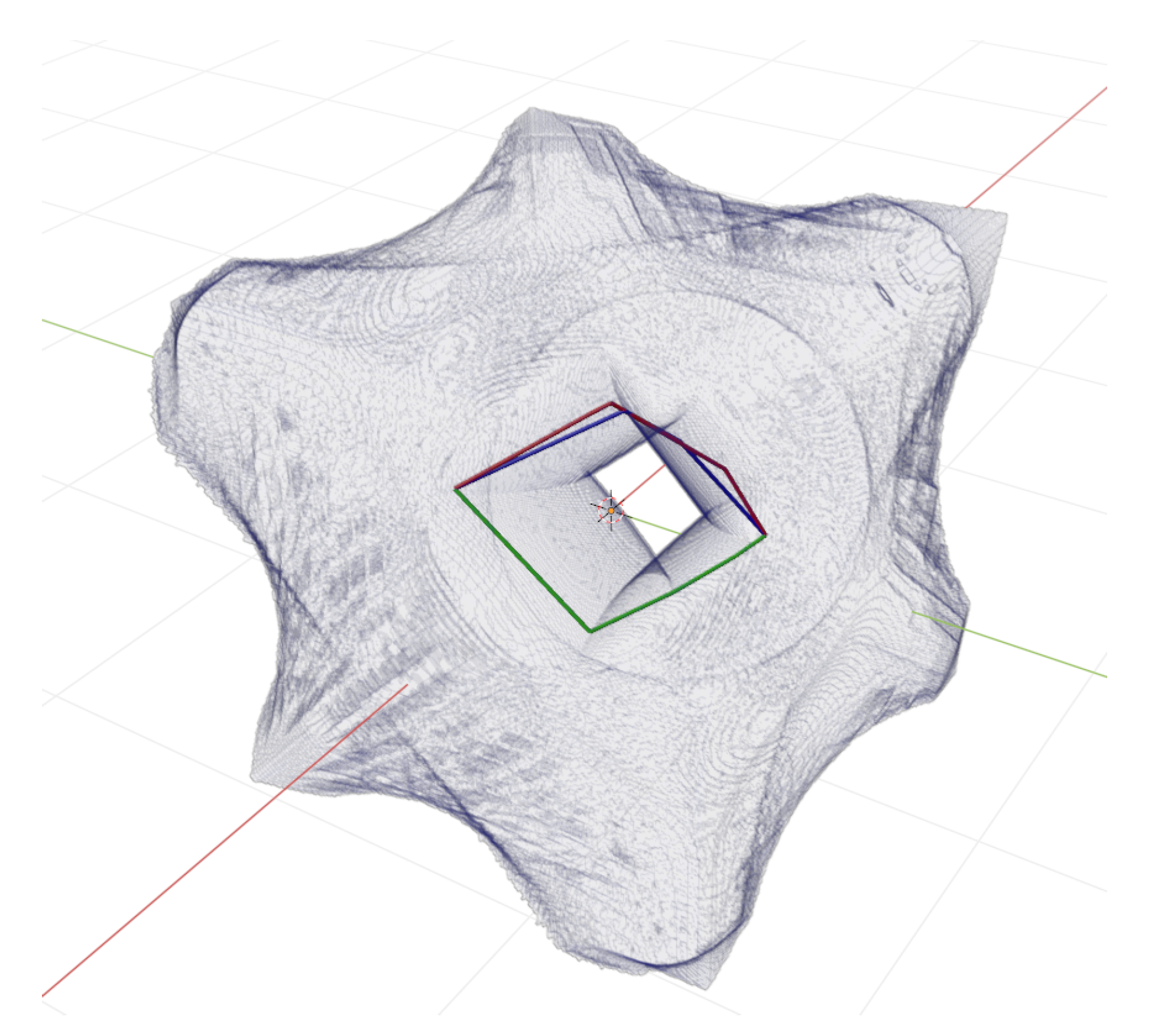
Figure 4 shows the trajectories for Test 3 inside the workspace virtual model. As can be seen from the figure, the PSO algorithm found only a local minimum of the criterion function for avoiding the obstacle.
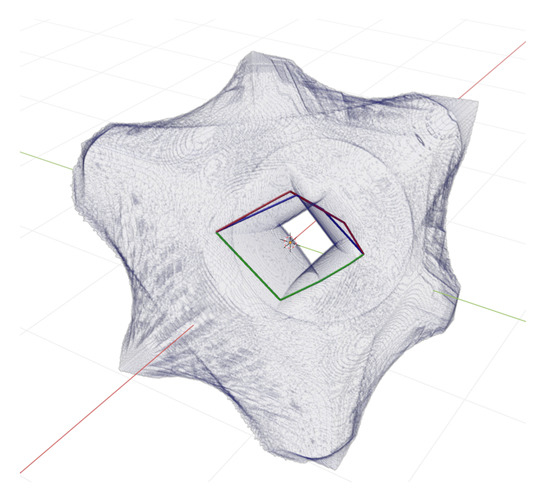
Figure 4.
Trajectories inside the virtual workspace model: GA—red, GWO—blue, PSO—green.
4. Conclusions
The application of heuristic algorithms made it possible to solve the problem of planning a trajectory for a 3D workspace, represented as a partially ordered set of integers. The planning of the trajectory in the space of input coordinates and the use of the Chebyshev metric as part of the criterion function made it possible to reduce the duration of the positioning from the initial to the final point of the trajectory. As part of our future work, the choice of the parameters of the optimization algorithms will be examined to achieve the best convergence rates. Various modifications of heuristic algorithms, including hybrid ones, will be applied. A comparative analysis of the effectiveness of the developed methodology with existing methods of trajectory planning will be carried out.
Author Contributions
Conceptualization, L.R. and D.M.; methodology, D.M.; software, D.M.; validation, L.R., D.M. and V.C.; formal analysis, D.M.; investigation, D.M.; resources, D.M. and V.C.; data curation, D.M.; writing—original draft preparation, D.M.; writing—review and editing, L.R., D.M. and V.C.; visualization, D.M. and V.C.; supervision, L.R.; project administration, L.R.; funding acquisition, L.R. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the state assignment of Ministry of Science and Higher Education of the Russian Federation under Grant FZWN-2020-0017.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
Abbreviations
The following abbreviations are used in this manuscript:
| GA | Genetic algorithm |
| PSO | Particle Swarm Optimization |
| GWO | Grey Wolf Optimization |
References
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Canny, J.F.; Lin, M.C. An opportunistic global path planner. Algorithmica 1993, 10, 102–120. [Google Scholar] [CrossRef]
- Zeng, W.; Church, R.L. Finding shortest paths on real road networks: The case for A*. Int. J. Geogr. Inf. Sci. 2009, 23, 531–543. [Google Scholar] [CrossRef]
- Khatib, O. Real time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Ericson, C. Real-time Collision Detection. The Morgan Kaufmann Series in Interactive 3-D Technology; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Ciaccia, P.; Patella, M.; Rabitti, F.; Zezula, P. Indexing Metric Spaces with M-Tree. In Proceedings of the Atti del Quinto Convegno Nazionale SEBD, Verona, Italy, 25–27 June 1997; pp. 67–86. [Google Scholar]
- Nissoux, C.; Simeon, T.; Laumond, J.-P. Visibility based probabilistic roadmaps. In Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No.99CH36289), Kyongju, Korea, 17–21 October 1999; pp. 1316–1321. [Google Scholar]
- Gil Aparicio, A.; Valls Miro, J. An Efficient Stochastic Constrained Path Planner for Redundant Manipulators. Appl. Sci. 2021, 11, 10636. [Google Scholar] [CrossRef]
- Bottin, M.; Rosati, G. Trajectory Optimization of a Redundant Serial Robot Using Cartesian via Points and Kinematic Decoupling. Robotics 2019, 8, 101. [Google Scholar] [CrossRef]
- Malyshev, D.; Rybak, L.; Carbone, G.; Semenenko, T.; Nozdracheva, A. Optimal Design of a Parallel Manipulator for Aliquoting of Biomaterials Considering Workspace and Singularity Zones. Appl. Sci. 2022, 12, 2070. [Google Scholar] [CrossRef]
- Khalapyan, S.; Rybak, L.; Malyshev, D.; Kuzmina, V. Synthesis of Parallel Robots Optimal Motion Trajectory Planning Algorithms. In Proceedings of the IX International Conference on Optimization and Applications (OPTIMA 2018), Petrovac, Montenegro, 1–5 October 2018; pp. 311–324. [Google Scholar]
- Rybak, L.; Malyshev, D.; Gaponenko, E. Optimization Algorithm for Approximating the Solutions Set of Nonlinear Inequalities Systems in the Problem of Determining the Robot Workspace. Commun. Comput. Inf. Sci. 2020, 1340, 27–37. [Google Scholar]
- Rogers, D. Procedural Elements for Computer Graphics; McGraw-Hill: New York, NY, USA, 1985. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).