Abstract
Dirty surroundings impose a detrimental effect on the beauty of our environment. Hiring and paying for a large workforce to clean the debris on the roads, parks, and streets is a costly and tiring job. This project has been carried out to design and fabricate a battery-powered road-sweeper vehicle (RSV), equipped with a scrubber system. The proposed machine, equipped with scrubbers, increases the operational time while decreasing the operational cost. In contrast with typical industrial counterparts, an eco-friendly road-sweeper machine is presented in this study.
1. Introduction
For decades, manufacturers and end-users alike have been absorbed by the challenge of keeping our surroundings clean and tidy. Hiring and paying for a large workforce to clean debris on the roads, parks, and streets is a very costly, time-consuming, and tiring job. Moreover, the initial and maintenance costs of gasoline-powered road-sweeper vehicles are very high. These road-sweeping vehicles are not eco-friendly, running on combustion engines and producing noise that renders these vehicles inappropriate to be used in places such as universities, hospitals, and airports to name a few. Machines and tools used for the collection of debris can typically be divided into three types: mechanical broom sweepers, vacuum sweepers, and regenerative air sweepers.
2. Previous Work
Although each type of street sweeper achieves the same goal—removing debris from paths—they all have unique benefits for different types of debris and roads that they operate on. As in [1], authors have described a novel method for road cleaning by merging the scrubbing system with suction, especially suitable for Indian road conditions. Ref. [2] deals with the use of an electric vehicle for sweeping and vacuum purposes, and [3] proposes the design, structure, and working of a multipurpose cleaning machine implemented with a vacuum part. In [4], the vehicle presented is autonomous and uses brushes in combination with a vacuum to perform the cleaning task. In [5], it is stated that the main difficulties in developing a sweeping robot are that the general characteristics of the sweeping brushes are not well known. In [6], a portable sweeping machine was developed from locally sourced raw materials to sweep and clean public places like markets, parks, gardens, etc., as part of the measures to prevent the further spread of COVID-19 in public places.
3. Methodology
The present work is aimed for the design, development, and evaluation of a manually, as well as a remotely, operated mechanical broom sweeper electrical road-cleaning machine, dedicated to the aforementioned places littered with junk food covers, cold drinks bottles, leaves, etc., where cleaning is an important parameter for sanitation and government regulations.
3.1. Modeling the Structure of the Vehicle
This CAD design was prepared in Autodesk AutoCAD. Figure 1 below gives the idea of the proposed design.

Figure 1.
AutoCAD Design.
- Antenna
- Power and Control Circuitry
- The see-through window for debris in the trash-can
- 36v Charging plug
- Brushless DC wheel hub motors
- Scrubber brush coupled with a DC-geared motor
- Caster wheels
3.2. Mechanical Structure
The basic support structure of the vehicle is made of iron sheets and columns. The base of the vehicle is made of an iron sheet that is easy to bend, and has the required strength to bear the weight of the waste storage and other electrical equipment. The upper roof is made of acrylic sheets that provide a finer look, as well as hide the structural asymmetry, and save the electronic equipment from weather and dust. Figure 2, provides the actual picture of the finished product.

Figure 2.
Mechanical Structure.
Power Consumption
The two motors used for propulsion only consume 300 watts of power, with each motor consuming 150 watts. The DC motor, which rotates the brush, only consumes 20 watts. So, this road-sweeper vehicle utilizes only 320 watts of power, which is equivalent to 0.435079 horsepower: reasonably less than the power consumed by a commercially available road sweeper operating on the combustion engine.
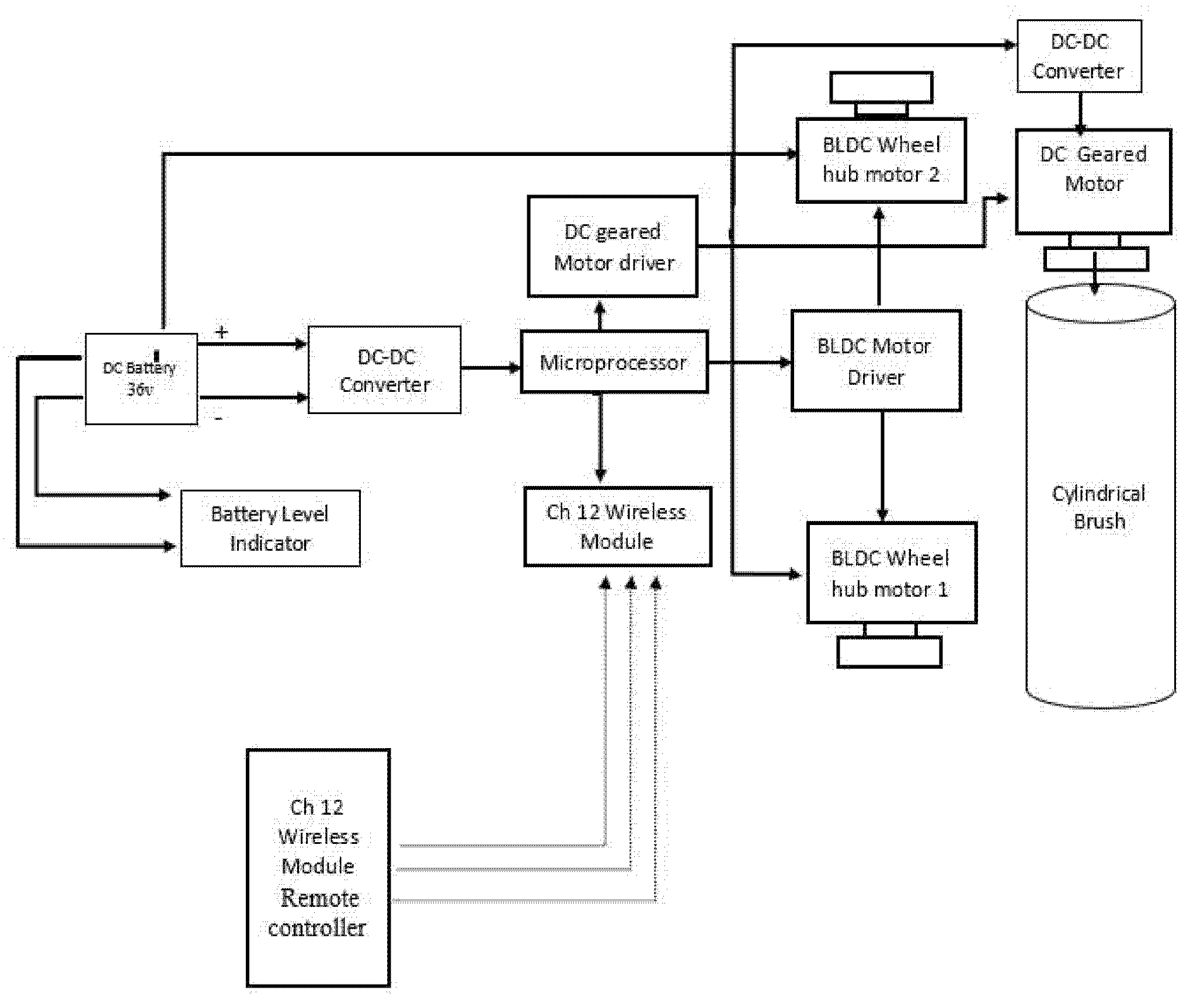
3.3. Block Diagram
A block diagram of the circuitry is given in Figure 3. The controlling circuitry of the road sweeper utilizes the CH12 wireless module, whose range is one kilometer in the open air. This road sweeper uses BLDC wheel hub motors, which are 40% more power-efficient than the same rated DC-geared motor.
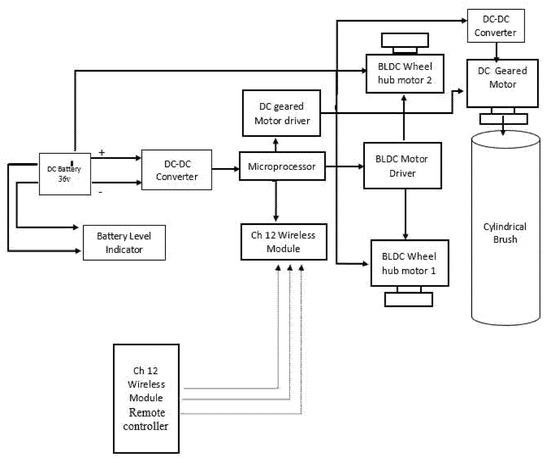
Figure 3.
Block Diagram of the Circuitry.
3.4. Simulation
BLDC Transient Analysis
Microprocessor PIC16F877 has been used for simulation purposes of the BLDC used. Figure 4 below shows the schematics for the control of BLDC.
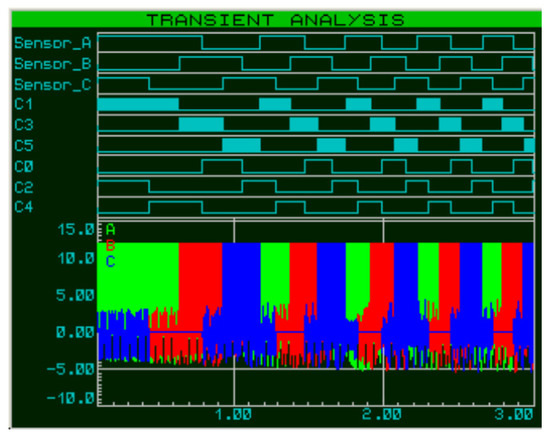
Figure 4.
Transient analysis of the BLDC.
4. Results
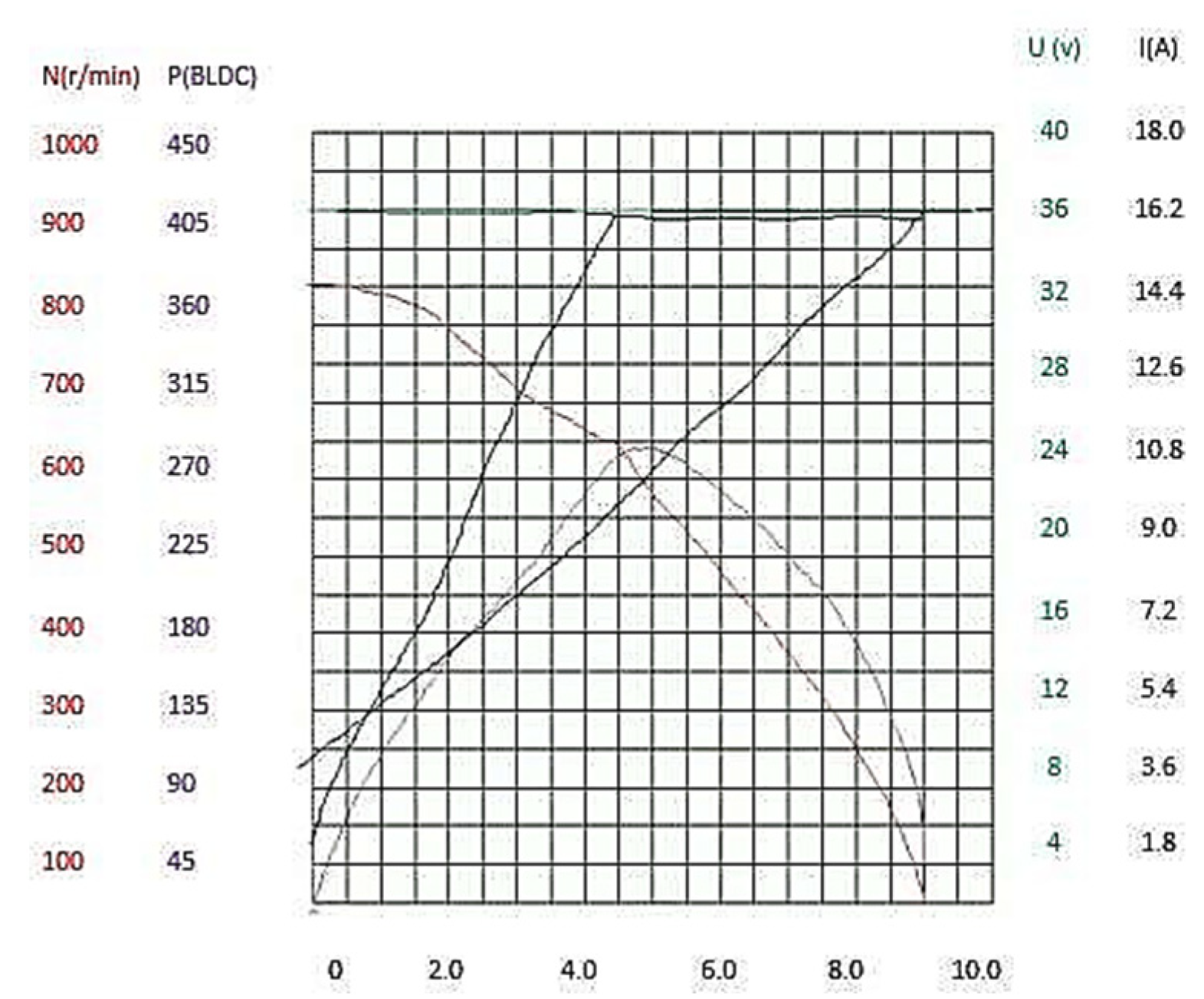
The shaft motor of the sweeper vehicle is 20 watts. Referring to Figure 5 since there were two BLDC motors used in the vehicle, the total power consumption of the vehicle can be observed in Figure 5, as follows.
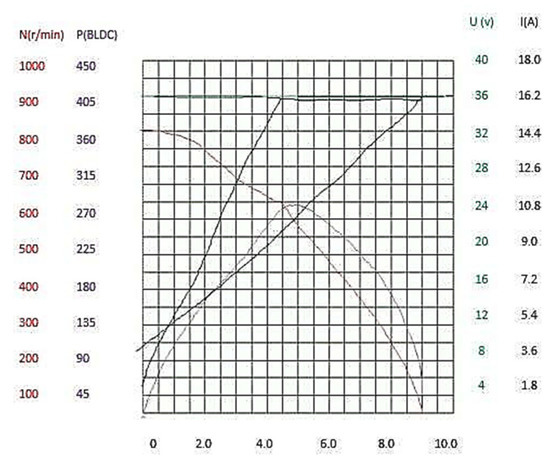
Figure 5.
Simulation Results.
5. Comparison
To evaluate it’s performance and other parameters a comparison table is given in Table 1. It provides the comparison, of our vehicle against it’s already developed counterparts, based on several parameters.

Table 1.
Comparison with other road sweepers.
6. Conclusions
The vehicle is moved by two BLDC motors, which make its operation noiseless. It is electric, and hence does not have any carbon emissions or other hazardous substances, making it completely environment friendly. The vehicle is a lot easier to transport and operate than others of its kind, and it is hundreds of times less costly than market available versions. It only needs 36-volt battery charging and does not consume any fuel, thus reducing its operational cost. The vehicle is controlled by the radio frequency module, which has a range of more than 1 km in open space. Thus, the person operating it can stand and clean a large area from a distance, reducing levels of tiredness in workers.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Mukesh, A.V.V.; Rao, M.V.; Chaitanya, M.S.R.K. Design and Development of Simplified Road Cleaning Machine with Modified Technology Suitable to Indian Environment. IJESR 2016, 4, 97. [Google Scholar]
- Avinash, P.; Kaushik, S.; Prakash, P.; Haridasan, H.; Balamurugan, S.; Vignesh, S. Design & construction of manually operated electric road cleaner. Int. J. Res. Appl. Sci. Eng. Technol. (IJRASET) 2014, 1, 113–121. [Google Scholar]
- Khan, A.; Pannase, A.; Sharnagat, A.; Gohan, G. Study of Multipurpose Road Cleaning Machine. Int. Res. J. Eng. Technol. (IRJET) 2017, 4, 1382–1386. [Google Scholar]
- Jeon, J.; Jung, B.; Koo, J.C.; Choi, H.R.; Moon, H. Autonomous Robotic Street Sweeping: Initial Attempt for Curbside Sweeping. In Proceedings of the 2017 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 8–10 January 2017. [Google Scholar]
- Wang, C.; Parker, G. Analysis of Rotary Brush Control Characteristics for a Road Sweeping Robot Vehicle. In Proceedings of the 2014 International Conference on Mechatronics and Control (ICMC), Jinzhou, China, 3–5 July 2014. [Google Scholar]
- Adedeji, K.A. Design, and construction of a street sweeping machine. Int. J. Eng. Appl. Sci. Technol. 2020, 5, 626–630. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).