Abstract
In the last few decades, the main problem which has attracted the attention of researchers in the field of aerial robotics is the position estimation or Simultaneously Localization and Mapping (SLAM) of aerial vehicles where the GPS system does not work. Aerial robotics are used to perform many tasks such as rescue, transportation, search, control, monitoring, and different military operations where the performance of humans is impossible because of their vast top view and reachability anywhere. There are many different techniques and algorithms which are used to overcome the localization and mapping problem. These techniques and algorithms use different sensors such as Red Green Blue and Depth (RGBD), Light Detecting and Range (LIDAR), Ultra-Wideband (UWB) techniques, and probability-based SLAM which uses two algorithms Linear Kalman Filter (LKF) and Extended Kalman filter (EKF). LKF consists of 5 phases and this algorithm is only used for linear system problems but on the other hand, EKF algorithm is also used for non-linear system. EKF is found better than LKF due to accuracy, practicality, and efficiency while dealing SLAM problem.
Keywords:
SLAM; GPS (Global Positioning System); LKF; EKF; RGB-D; LIDAR (Light Detecting and Range); UWB 1. Introduction
From the last couple of years, Artificial intelligence (AI) is became the most discussed topic in the field of robotics. It raises a great revolution in the field of research and can change the new era of the world. Its prominent results motivate the researchers to do research on it. Unmanned Aerial Vehicles (UAV) are being utilized to perform different tasks such as equipment transportation, researching, rescue, agricultural and military spy operations as well. It is an important thing of human life that makes life easy by its use. UAVs can operate anywhere, even where humans don’t have access. However, the main problems of UAVs that attract the researchers’ attention are their navigation and build-up map of an unknown environment at the same time. This problem mostly called Simultaneously Localization and Mapping (SLAM) [1,2,3,4,5,6,7,8].
The applications of UAVs are increasing with the passage of time due to their usefulness abilities such as less time consuming, reachability anywhere, transportation, etc. Therefore, mostly unmanned vehicles use prior knowledge or Global Position System (GPS) to navigate themselves and operate in the outdoor environment. However, UAVs should have a unique architecture that make these capable to operate in an unknown environment without any external positioning source.
There are many approaches available as a solution to the SLAM problem which uses different sensors such as Red Green Blue and Depth (RGBD), Light Detecting and Range (LIDAR), Ultra-Wideband (UWB) techniques, etc., and algorithms. The main objective of this review paper is to briefly and comparatively study different SLAM approaches to elaborate the best one based on their pros and cons.
2. Materials and Methods:
In this section, the different approaches are discussed to solve the SLAM problem while using RGBD, LIDAR, UWB, etc., sensors.
- (A)
- Ultra-wideband based Algorithm Approach:
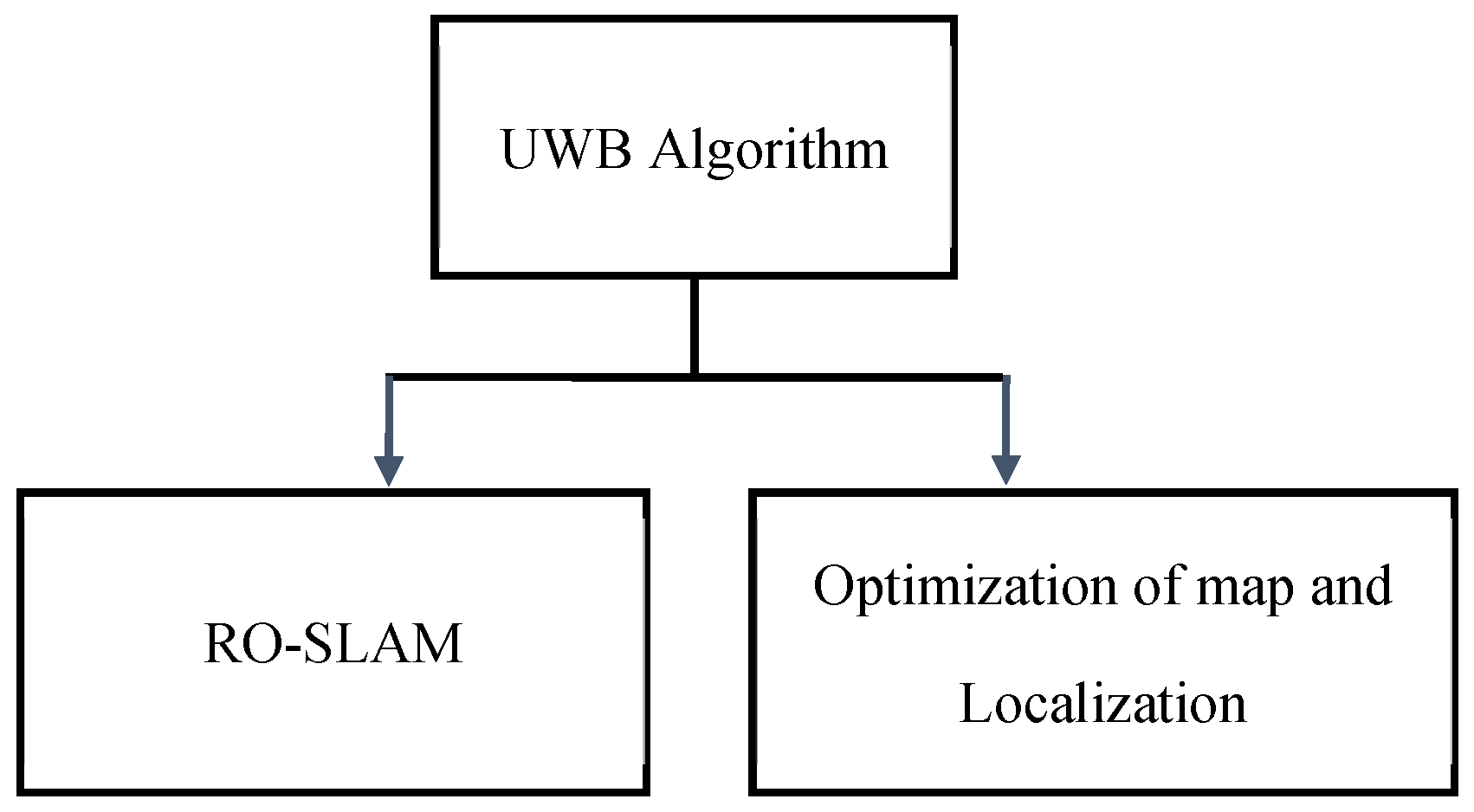
UWB sensors-based algorithms mainly consist of two steps
In the first step, get the data about position estimation of UAV by use of UWB sensors then the collected data is used to build up the 3D map of surroundings. Therefore, this step is called Range-Only SLAM (RO-SLAM) as shown in Figure 1. The second step of UWB based algorithm includes optimization of position estimation data collected from UAV and UWB sensors for localization and mapping.
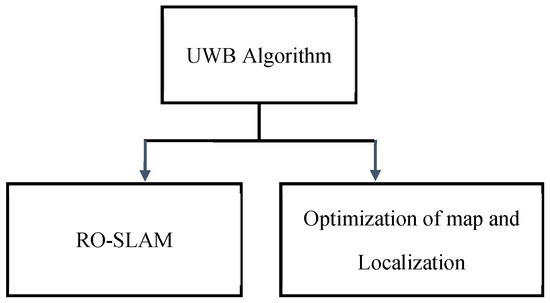
Figure 1.
Steps of UWB based Algorithm.
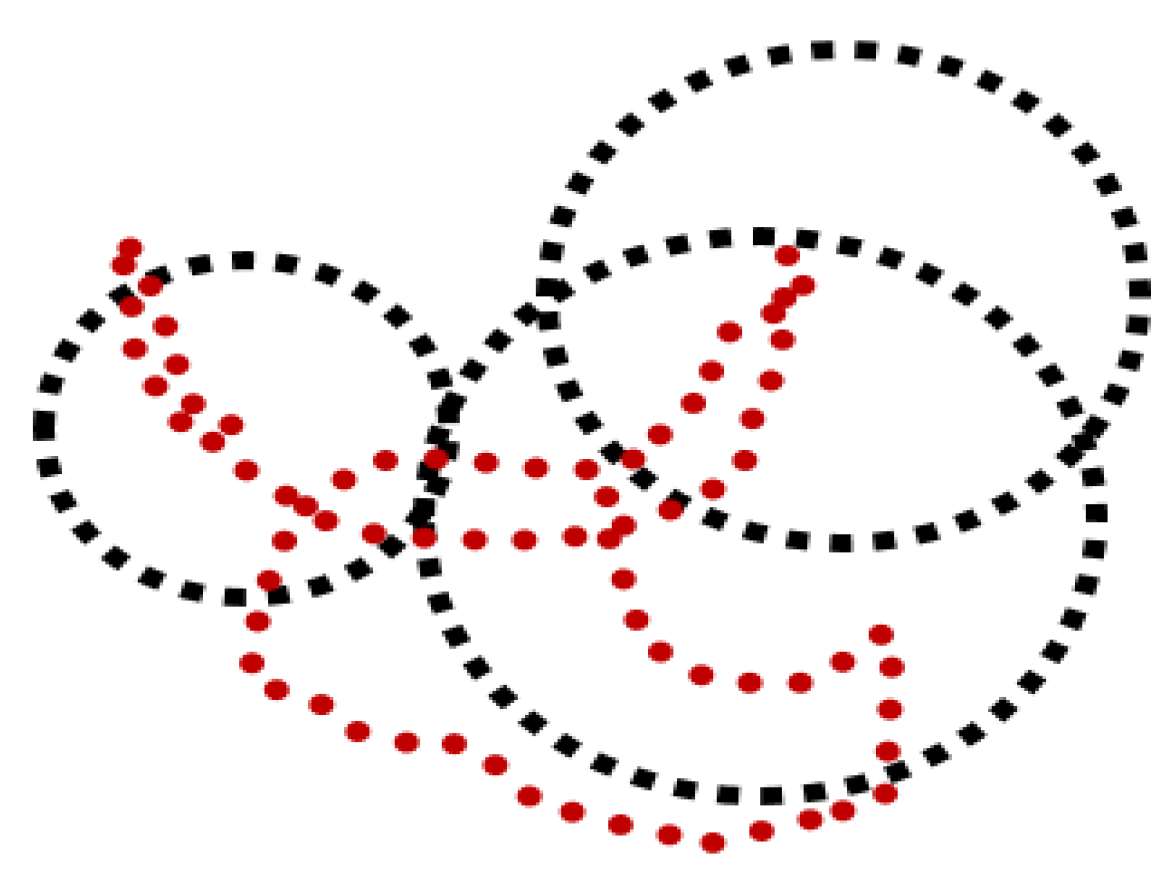
Initially, if there is no data set then it initializes randomly the value of sensors’ position rather than the re-calculation of all parameters completely as shown in Figure 2, moreover, the optimizer is used to remove the uncertainty from the values [9,10]. UWB based algorithm is appropriate for low-distance localization and mapping in an indoor environment. It is capable to acquire accurate data within a few meters or centimeters [11].
Figure 2.
Orthogonal view of Multiple Hypothesis of Robot and 3 Ultra-wideband sensors position.
- (B)
- Kalman Filter (KF) based Approach:
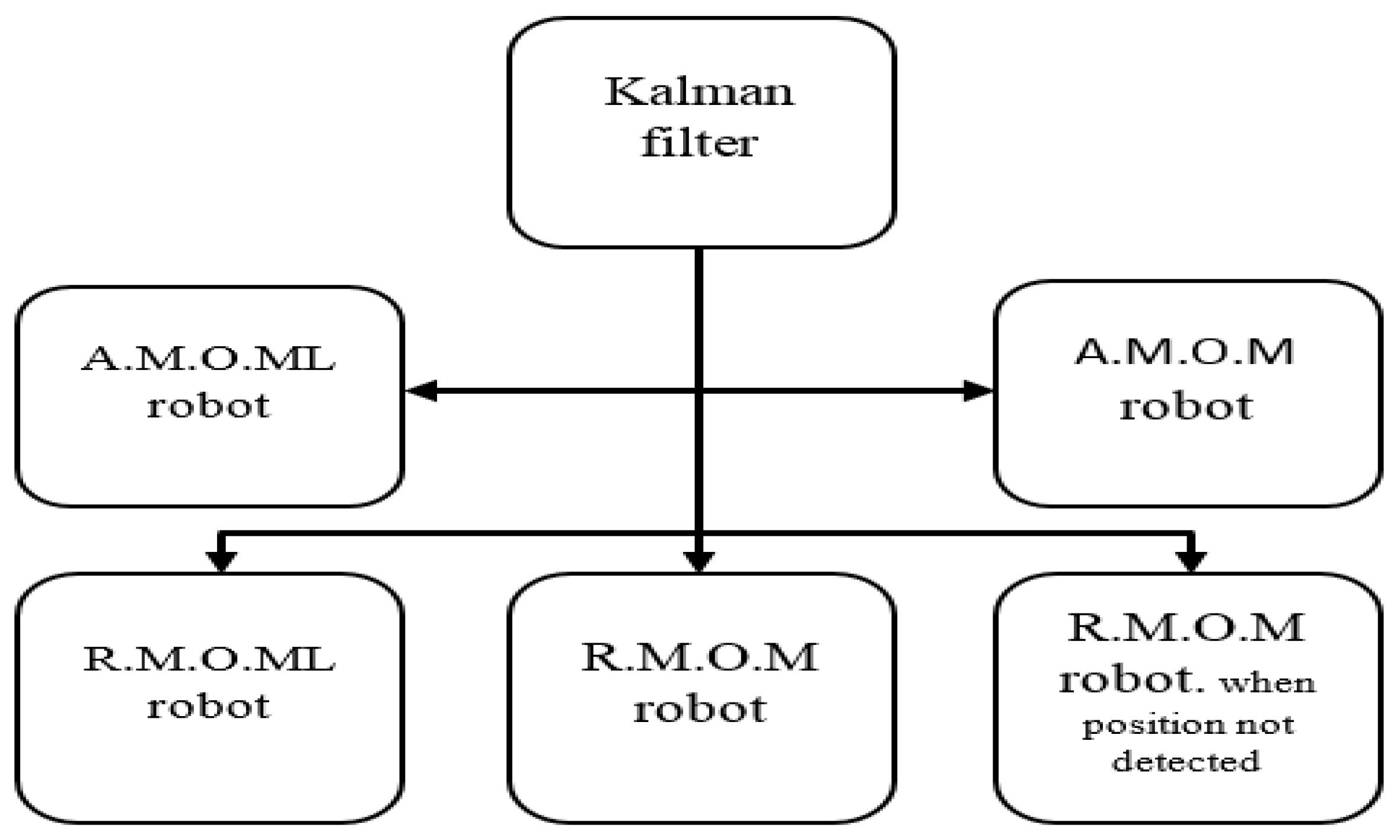
Kalman filter-based approach is sometimes called the linear Kalman filter approach because it uses mostly for linear systems. Figure 3 shows the following five phases,
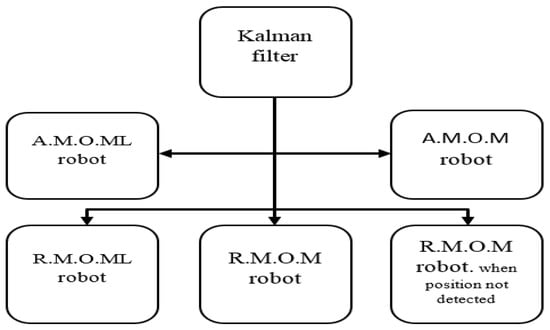
Figure 3.
Phases of Kalman filter based Approach.
- Absolute measurement of motionless robot (A.M.O.ML).
- Absolute measurement of moving robot (A.M.O.M).
- Relative measurement of motionless robot (R.M.O.ML).
- Relative measurement of moving robot (R.M.O.M).
- Relative measurement of moving robot while position of robot not detected.
It uses linear approximation that is related to covariance error matrices and positions to find out the prior condition estimation [12]. These are mostly no-deal non-linear systems but sometimes KF can be used for non-linear systems if the first-order partial derivative of calculations is available.
- (C)
- Extended Kalman Filter Based Approach:
EKF is used for non-linear systems. It linearized the non-liner systems to solve the problem. Similar to other methods, it has a problem that if noise is included in the measurements then the UAV robot can divert from its original route and produce inconsistency in flight.
3. Discussion
In the last few years, Artificial Intelligence has raised a great revolution in the field of unmanned robotics and become a most discussed topic. UAVs have an importance and deep impact on human life in different aspects of daily routine. Therefore, UAVs should have architecture and design which helps them to complete their tasks in challenging environment without any external positioning source. A lot of work has been carried out to solve the problems of UAVs.
This paper represented a comparative study of SLAM approaches and briefly explained as well in the previous sections. All discussed approaches are sensors and filtered based.
The pros and cons of each approach are discussed in Table 1 and compared to each other to find out the best one among these. Form Table 1, the comparison shows that Extended Kalman Filter (EKF) based approach has the ability to deal with non-linear models, good loop closure and is suitable for long distance as well rather than Ultra Wideband and Kalman Filter based approaches which are only capable to deal with short-distance and linear models, respectively.

Table 1.
Comparison of discussed SLAM Approaches based on pros and cons.
4. Conclusions
In this paper, we represented a comparative study of previously existing SLAM techniques. In order to find the most suitable technique among these techniques, different parameters are set to evaluate SLAM techniques. Table 1 in the discussion section shows that EKF based techniques are better as compared to KF and UWB based techniques due to their properties of dealing with nonlinear models, having good loop closure ability, and applications in outdoor and long distances.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Sukkarieh, S.; George, M. Tightly coupled INS/GPS with bias estimation for UAV applications. In Proceedings of the Australiasian Conference on Robotics and Automation (ACRA), Sydney, Australia, 5–7 December 2005. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005; p. 163. [Google Scholar]
- Kumar, V.; Michael, N. Opportunities and challenges with autonomous micro aerial vehicles. Int. J. Robot. Res. 2012, 31, 1279–1291. [Google Scholar] [CrossRef]
- Grzonka, S.; Grisetti, G.; Burgard, W. A fully autonomous indoor quadrotor. IEEE Trans. Robot. 2012, 28, 90–100. [Google Scholar] [CrossRef] [Green Version]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, present,168 and future of simultaneous localization and mapping: Towardtherobust-perceptionage. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Irshad, M.J.; Shi, H.; Xu, W. Passive source localization using compressive sensing. Sensors 2019, 19, 4522. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ali, U.; Muhammad, W.; Irshad, M.J.; Manzoor, S. Multi-sensor fusion for underwater robot self-localization using PC/BC-DIM neural network. Sens. Rev. 2021; ahead-of-print. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. Symbiotic navigation in multi-robot systems with171 remote obstacle knowledge sharing. Sensors 2017, 17, 1581. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fabresse, F.R.; Caballero, F.; Maza, I.; Ollero, A. Undelayed 3d RO-SLAM based on gaussian-mixture and reduced spherical parametrization. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 1555–1561. [Google Scholar]
- Fabresse, F.; Caballero, F.; Merino, L.; Ollero, A. Active perception for 3D Range-only Simultaneous Localization and Mapping with UAVs. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1–6. [Google Scholar]
- Gonz’alez, J.; Blanco, J.-L.; Galindo, C.; Ortiz-de-Galisteo, A.; Fernandez-Madrigal, J.-A.; Moreno, F.A.; Mart’ınez, J.L. Mobile robot localization based on ultra-wide-band ranging: A particle filter approach. Robot. Auton. Syst. 2009, 57, 496–507. [Google Scholar] [CrossRef]
- Demim, F.; Nemra, A.; Louadj, K.; Mehal, Z.; Hamerlain, M.; Bazoula, A. Simultaneous localization and mapping algorithm for unmanned Ground vehicle with SVSF filter. In Proceedings of the 2016 8th International Conference on Modelling, Identification and Control (ICMIC), Algiers, Algeria, 15–17 November 2016; pp. 155–162. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).