Abstract
This paper investigates the bipartite consensus problem for multi-agent systems subject to both switching dynamics and external disturbances within an event-triggered control (ETC) framework. The investigation commences with an analysis of time-invariant systems to establish bipartite consensus, and subsequently expands the framework to accommodate the complexities of switched systems. In time-invariant systems, agents update their states only when the event-triggering threshold is exceeded; the convergence of this mechanism can be rigorously established via an error dynamics mode. For switched systems, the system state is also updated solely when the event-triggering condition is met. Once all subsystems are stabilized, we design an appropriate mean sojourn time to mitigate state jumps caused by switching, thus ensuring bipartite consensus. Finally, four case studies based on numerical simulations to verify the theoretical results.
1. Introduction
In multiagent systems, a common value for the state variables across all agents is achieved through control protocols and coordination mechanisms, an outcome known as consensus. Classical consensus theory demonstrates that interactions based on nearest-neighbor rules enable agents to asymptotically align their motion directions [1]. Systematic investigations have addressed consensus problems under directed network topologies (both fixed and switching), while also revealing the influence of communication delays on consensus in fixed undirected networks [2]. In multi-vehicle system coordination, distributed protocols are designed for agents governed by first-order and second-order dynamics, under the necessary condition that the communication graph admits a directed spanning tree [3]. Further studies established convergence criteria for second-order algorithms in fixed and switching-directed topologies [4]. For higher-order agent dynamics, linear coordination protocols have been formulated, with convergence criteria—both necessary and sufficient—rigorously derived for consensus in networks of order greater than two [5]. Refined criteria for linear systems have provided crucial theoretical support for stability analysis and controller design [6]. In nonlinear systems, researchers have explored leader-follower frameworks with heterogeneous agents, addressing complexities arising from asymmetric interactions [7]. Additionally, consensus theories under input saturation constraints have been developed to address practical implementation challenges with bounded control inputs [8].
Traditional multi-agent systems typically assume cooperative interactions through non-negative communication networks. However, practical scenarios often involve both cooperative and competitive relationships. This challenge has been addressed through bipartite consensus frameworks that extend conventional non-negative topologies to signed networks [9]. A distributed control protocol partitions agents into two distinct groups, achieving intra-group state consensus while inter-group states converge to opposite values under structurally balanced signed networks. Recent research has significantly advanced this field. Systematic analyses have been conducted for bipartite consensus in homogeneous and heterogeneous networks [10]. Later studies generalized these results to broader classes of linear agent networks operating over signed digraphs [11,12]. Input saturation constraints in bipartite consensus for linear systems have also been addressed [13]. Further developments in bipartite consensus research are documented [14,15,16].
Depending on application requirements, multi-agent systems have branched into various specialized control paradigms. For example, prescribed-time control employs time-varying gains that increase when the tracking error is large to achieve desired performance within a user-specified finite time. However, the resulting sharp increase in control effort may lead to actuator saturation and excessive energy consumption [17]. In scenarios involving unknown or uncertain dynamics, multi-agent reinforcement learning (MARL) has recently emerged as a prominent approach due to its strong adaptability. Nevertheless, MARL-based methods typically lack rigorous stability guarantees and often rely on powerful computational platforms for extensive offline training [18].
Practical constraints from limited energy and bandwidth necessitate resource-efficient communication strategies in multi-agent systems. The two primary approaches are time-triggered control (actions executed at fixed sampling intervals) and event-triggered control (ETC) (communication activated only upon predefined state/output-related events). In ETC frameworks, control updates occur solely upon detecting significant changes in system states or outputs, offering enhanced resource efficiency [19,20]. This efficiency has driven extensive research interest in ETC methodologies. Early contributions include the development of error function-based event-triggering mechanisms, where communication is activated upon threshold violations [21]. The integration of ETC into multi-agent systems was first explored in [22], with subsequent extensions to consensus problems across diverse dynamics: single-integrator systems [23,24], second-order systems [25,26], and linear multi-agent systems [27,28]. Recent advancements have adapted ETC principles to bipartite consensus scenarios. For first-order systems, event-triggered bipartite consensus protocols have been systematically analyzed [29]. Operating under both undirected and directed graph topologies, dynamic event-triggered (DET) mechanisms further generalize these results, addressing distributed bipartite consensus for multi-agent systems [30]. Compared to static event-triggering laws, DET strategies significantly extend inter-event intervals, improving resource utilization efficiency [31,32].
However, the existing literature primarily focuses on time-invariant systems. To address this gap, research on switched systems has gradually emerged, with relevant surveys provided in [33,34,35]. Notably, prior works on event-triggered control (ETC) for multi-agent systems have mainly considered switching communication topologies [36,37,38,39]. In contrast, this paper investigates ETC for achieving bipartite consensus in switched multi-agent systems where the switching arises from changes in the agents’ intrinsic dynamics. Research of this form remains relatively scarce.
This paper makes the following key contributions:
- Research on multi-agent consensus under dynamically varying system dynamics remains relatively scarce; this paper provides incremental contributions to this direction.
- By integrating switched systems and disturbed systems within the event-triggered control (ETC) framework, the proposed approach better reflects real-world application scenarios, thereby enhancing the generality and practical relevance of the theoretical results.
- This work extends the study of multi-agent systems to the domain of bipartite consensus. Specifically, by introducing a transformation matrix, the bipartite consensus problem is reformulated as a standard consensus problem.
The subsequent sections of this paper are arranged as follows: Section 2 introduces the theory of signed graphs and related lemmas; Section 3, Section 4, Section 5 and Section 6 address ETC bipartite consensus for linear and nonlinear MASs, under time-invariant and switched systems; In Section 7, we present our simulation studies and results; A summary of the entire paper is presented in the final section.
Notations: Given a symmetric matrix , denote its eigenvalues by (). These eigenvalues satisfy . For a positive definite (respectively, negative definite) matrix N, we write .
The notation denotes the identity matrix, and I for an identity matrix of any appropriate size. Furthermore, the notation defines a diagonal matrix with diagonal the elements . ⊗ signifies the Kronecker product. The function of the sign function satisfies:
2. Materials and Methods
A weighted signed graph is modeled by a triple . Here, is the vertex set of cardinality n, E is the set of edges where , with the weighted adjacency matrix associated to the graph. Let indicate that the node has no self-loop, and indicates , otherwise . Additionally, cooperation between agents i and j is indicated by , while signifies that these two agents are competitive. Evidently, the matrix A is not necessarily a non-negative matrix, except in cases where the multi-agent system involves only cooperative interactions. For a node i, its neighborhood is denoted by and its in-degree is expressed as .
Let represent the degree matrix of the weighted signed graph, with the Laplacian matrix of defined as , where:
We define matrix to represent the interaction topology between the leader and followers, where denotes the leader-follower coupling weight.
Definition 1 (Structure Balance).
A signed graph is considered structurally balanced if and only if all its vertices can be partitioned into two disjoint subsets and (where ), satisfying the following specific conditions:
- 1.
- For every positive edge weight , the corresponding vertices and are grouped within the common subset (i.e., both in or both in ).
- 2.
- For every negative edge weight , the corresponding nodes and belong to different subsets (i.e., one in , the other in ).
Lemma 1.
To convert the signed Laplacian L of a structurally balanced graph into a standard non-negative Laplacian, a gauge transformation () is applied, producing . This transformation ensures all edge weights in the underlying network are positive ([9]).
Remark 1.
By applying the transformation matrix where , we can convert the signed graph into an unsigned graph. This conversion transforms the bipartite consensus challenge into a conventional consensus problem. Furthermore, the matrix , defined as , can be shown to be positive definite.
2.1. Problem Statements
Consider an MAS with n linear follower agents subject to disturbances, whose dynamics can be given by the following equations:
where represents the state of agent i, and is referred to as the control input or control protocol of agent i. The matrices and , governed by the switching signal , are piecewise constant. They are fixed during the sojourn time of each subsystem and change values only at the switching instants. is an external disturbance. The leader’s dynamics are given by:
where represents the state of the leader. As an independent entity, the leader is autonomous. Hence, its dynamics remain unaffected by the follower agents.
Consider a multi-agent system comprising nonlinear followers that are subject to disturbances. The dynamical model for each agent is given by:
where denotes the dynamics of agent i, governed by the switching signal , and represents the control input of this agent. The leader’s dynamics are given by:
Assumption 1.
The pair possesses the ANCBC property—it is stabilizable with all eigenvalues of in the closed left-half plane. This guarantees the existence of a positive definite matrix fulfilling the following linear matrix inequality:
where is the smallest eigenvalue of the matrix and the matrix can be obtained by solving the LMI (using standard convex optimization tools such as YALMIP in MATLAB R2023a).
Note: In the case of a time-invariant system, the switching signal is either absent or remains constant, implying that the matrices A, B, and P are constant.
Assumption 2.
The is bounded above, and its norm satisfies , where c is a positive constant.
Assumption 3.
The is bounded above, and its norm satisfies , where is a positive constant.
2.2. Controller Design
This section develops a distributed event-triggered control scheme to attain bipartite consensus for leader-follower MASs.
To ensure bipartite consensus, the following distributed control input is introduced:
To reduce system communication overhead, we develop a event-triggered communication strategy, where each agent transmits its actual states to neighbors at event-triggered time instants, while during non-triggering intervals, it does not communicate and instead utilizes approximated values of both its own states and neighbors’ states. Let denote the approximated value, which satisfies the following condition:
where denotes the event-triggering instant of the k-th event for agent i, with i being the agent index; Q refers to the triggering function and denotes the minimum communication time interval.
Remark 2.
In (7), agents receive neighbors’ states only during event triggering. Notably, the leader’s estimated initial state equals its true initial value, i.e., .
When introducing the event-triggered mechanism, for , the control protocol satisfies:
The error between the approximated state and the actual state of the agent is given by . Meanwhile, the tracking error between the agent and the leader during leader-following tasks is defined as .
Define the matrices and E as
We incorporate the variables into the protocol(8), so it follows that:
Definition 2.
MASs reach bipartite tracking consensus once the following requirements are met:
3. Linear Time-Invariant System
Here, we investigate the problem of bipartite consensus under an event-triggered mechanism for a linear time-invariant system.
To achieve bipartite consensus in a leader-based multi-agent system, we employ the controller defined in Equation (8). To demonstrate the effectiveness of this control protocol, we introduce two distinct sets of error variables—formulated in Equation (9)—and substitute them into the system dynamics (1). This transformation recasts the consensus problem as a stability analysis of the resulting error system, which is described as follows:
where .
Define and , , , we can obtain:
Remark 3.
By employing a transformation matrix, we reformulate the bipartite consensus problem as a conventional consensus problem, followed by stability analysis. A similar procedure is applied in all subsequent sections.
Assumption 4.
In the signed graph (which includes one leader and N follower), structural balance and connectivity are maintained.
Theorem 1.
Proof.
We define a Lyapunov function for the error dynamics:
then we obtain
where , and .
We apply the Young’s inequality: , , if the following inequality is satisfied:
then we have
Therefore, the transformed error system can achieve consensus, that is, the original system can achieve bipartite consensus. □
Remark 4.
When the function , it is at the event-triggered moment . At this time, the network will communicate and update the state, then the state measurement error will be reset to 0. As time increases, the error will accumulate until the next trigger moment when it is reset again, repeating this process. Moreover, to prevent Zeno behavior, this paper set a minimum inter-event time (with ) is enforced for each agent.
4. Linear Switched System
Here, we address the issue of bipartite consensus under an event-triggered mechanism with switching system.
In a linear switched system, for arbitrary time instances , define as the total count of discontinuities in the switching signal within the time interval . Suppose there are constants and for which the following inequality holds:
then is called the mean sojourn time of switching signal , and is called the jitter bound.
Remark 5.
The switching signal (denoted by σ) maps , where represents the set of all subsystems. This signal governs the system’s switching behavior over time, with each subsystem corresponding to a graph . A jitter bound indicates that no switching occurs on any time interval shorter than τ. When , this implies that at most one switching event can take place over any time interval of length less than τ. In this case, the mean sojourn time switching is equivalent to standard sojourn time switching.
When the system switches, the system dynamics are represented by the following equations:
and the control input is given by
then, the dynamics of the error system can be expressed as:
Assumption 5.
For each subsystem , the graph is connected and satisfies structural balance.
Assumption 6.
If there exist a positive number and , positive definite matrices for all , such that b, hold, and the mean sojourn time τ satisfies
Remark 6.
When switching occurs in the system, energy transitions arise between the pre-switching and post-switching states. From an energetic perspective, the parameter μ represents the multiplicative factor of energy growth. Across multiple switching transitions, the energy growth factor admits a finite upper bound. Specifically, after independently solving for each subsystem’s Lyapunov matrix , the discrepancy between any two matrices and can be quantified by the maximum eigenvalue of their product . The parameter μ is then defined as:
Theorem 2.
Proof.
First, we establish the stability of each subsystem within the switched system. For every subsystem , we define the error Lyapunov function:
where . For notational convenience, we drop the subscript and denote , , , and simply as P, A, B, and , respectively. Then, the time derivative of along the error dynamics satisfies
where , , and . We apply the Young’s inequality: , . One can observe if , , and the following inequality is satisfied:
then we have
Since is positive definite, we obtain
where and are constants.
According to inequality (25) and (26) we have
this implies that , , decreases exponentially along the trajectories of each subsystem.
Without loss of generality, consider an arbitrary time interval , and assume the number of switchings in this interval is , with switching times .
Then, based on the comparison lemma and inequality (27), we obtain
In other words, when no switching occurs, the Lyapunov function is always exponentially decreasing. On the other hand, at switching instants, we allow the Lyapunov function to increase, but this increase is bounded. Specifically, according to for all , we have
By combining inequalities (28), with the jitter bound and we derive:
where is the exponential decay rate. This demonstrates that the Lyapunov function of the system is exponentially decreasing. Furthermore, the condition ensures . This guarantees the exponential decay rate is positive, thereby establishing global exponential stability. Therefore, leader-follower consensus is guaranteed. It can therefore be concluded that bipartite consensus is reachable. □
5. Nonlinear Time-Invariant System
This section addresses a nonlinear multi-agent system whose dynamics are given by the following equation:
We derive the dynamics of the error system as follows:
The compact form of the error system dynamics can be formulated as:
where , and (where for all is a positive definite matrix.
Assumption 7.
The function f is nonlinear and bounded, and satisfies the following Lipschitz condition:
where ρ is the positive constant.
Theorem 3.
Proof.
Define the error Lyapunov function candidate as:
To analyze its time evolution, we compute the derivative along system trajectories:
To bound the cross terms, we apply the Young’s inequality:
where which yields:
Substituting this bound into (37), we obtain if the following inequality holds:
Then we obtain:
Thus, the nonlinear MAS with disturbances can achieve bipartite consensus. □
6. Nonlinear Switched System
This section examines consensus in nonlinear and switched MASs using event-triggered mechanisms.
Analogous to the case of linear switching system, we assume that the subsystem satisfying Assumption 1, 5. The dynamics of the nonlinear multi-agent system are governed by the following equation:
When the system switches, the control input is defined as
Assumption 8.
Given and , if there exist a family of continuously differentiable functions , a switching signal , and two functions and such that satisfies
and the mean sojourn time τ satisfies the following inequality:
Theorem 4.
Proof.
The proof is conducted in two steps. First, we establish the stability of each subsystem. Under Assumption 8, the stability of each individual subsystem is guaranteed; the detailed proof follows a similar approach to that used for nonlinear time-invariant systems. Second, we assume that the energy jumps at switching instants are bounded above (). The overall switched system remains stable under the average dwell time condition. Since the stability argument adopted in these proofs closely resembles the method used for linear switched systems in Equation (30), the proofs are omitted here for brevity. □
7. Simulation Results
We consider an MAS comprising one leader and five followers, as illustrated in Figure 1. In this structure, the leader (agent 0) and agents 1 and 5 belong to one category, while agents 2, 3, and 4 are grouped into another category with opposite values.
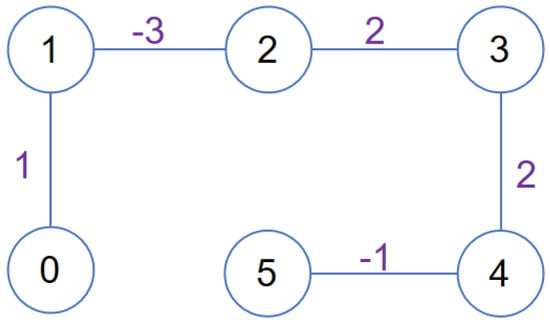
Figure 1.
Topology of Muti-Agent Systems.
The matrices L and H are set as follows:
7.1. Linear Time-Invariant Systems
The parameter is designed as
It is evident that Assumption 1 is satisfied. One can see that eigenvalues of are 8.2613, 5.3120, 2.3812, 0.9207, 0.1247. Combining the min eigenvalue , we can compute that
Considering disturbances with c less than 0.05, and the initial states of the agents are configured as follows:
where denotes the 3D state vector of agent i.
By computing and to satisfy the stability condition , we select .
As shown in Figure 2, the state trajectories of all agents are depicted in subfigures (a), (b), and (c), while the event-triggering instants are illustrated in subfigure (d). It can be observed that all agents eventually achieve bipartite consensus.
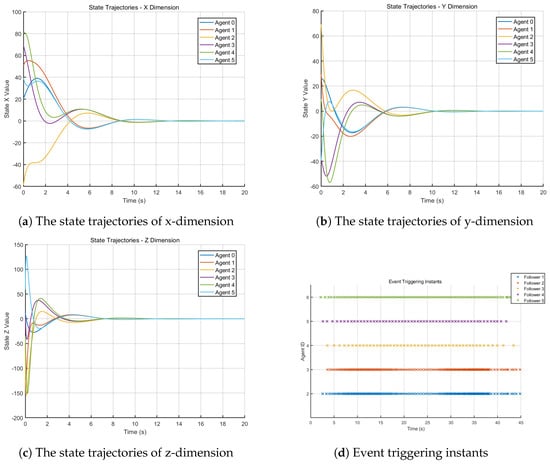
Figure 2.
Multi-Agent Systems In A Linear Time-Invariant System.
7.2. Linear Switched Systems
In the switching system, the parameters are configured as follows:
It can be clearly observed that these parameters also satisfy Assumption 1. Through computation, we determine that
The initial states of the leader and the other five agents are defined as follows:
Through calculation, , , , by setting , we obtain s. With the switching signal and its corresponding state trajectories shown in Figure 3, the system switches between Subsystem 1 and Subsystem 2 under a mean sojourn time.
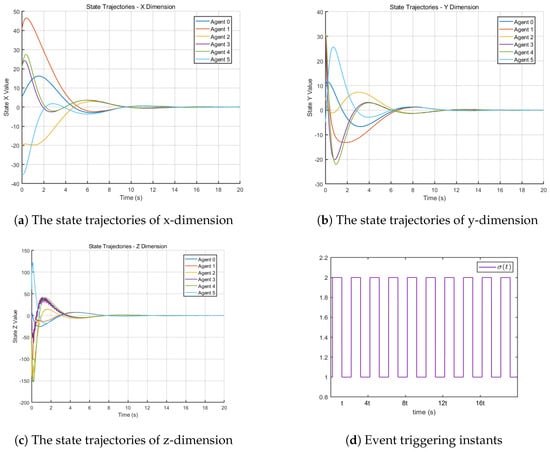
Figure 3.
Multi-Agent Systems in linear switched Systems.
7.3. Nonlinear Time-Invariant Systems
The nonlinear terms are given by , with . The following initial states are used for the agents:
The event-driven parameters for the agents are chosen as: . Throughout the simulations, we have , which satisfies the stability condition . Using protocol (Equation (9)), Figure 4 presents the state trajectories of all agents, along with their corresponding event-triggering instants, demonstrating that bipartite consensus is achieved.
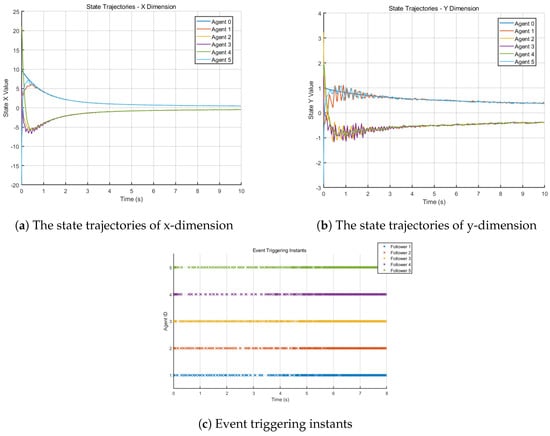
Figure 4.
Multi-Agent Systems in Noninear Time-Invariant System System.
7.4. Nonlinear Switched Systems
The nonlinear terms of the agents are described by , .
The following initial states are used for the agents:
For , the system has a Lipschitz constant and has a Lipschitz constant . We choose the control gain . Throughout the simulations, we have , , which satisfies the stability condition . Then we obtain . Under the settings of mean sojourn time and event-triggered mechanism, the system achieves bipartite consensus illustrated in Figure 5.
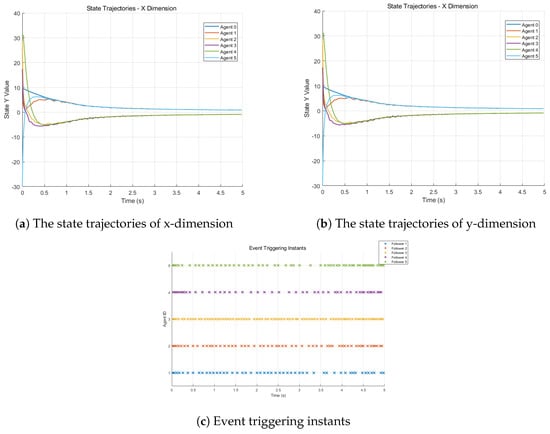
Figure 5.
Multi-Agent Systems in Noninear Switched Systems.
8. Conclusions
This paper studies event-triggered bipartite consensus for MASs with linear/nonlinear dynamics for both time-invariant and switched systems. In time-invariant systems, we analyze consensus using an error transformation model and Lyapunov theory. For switched systems, we first establish the stability of each subsystem, then address the switching-induced jumps by designing an appropriate mean sojourn time, thereby achieving asymptotic consensus. Simulations confirm the validity and efficacy of the introduced method. How to integrate the existing model with reinforcement learning and how to investigate bipartite consensus under unbalanced network structures will be the focus of our future research.
Author Contributions
Conceptualization, Z.Z. and K.D.; methodology, Z.Z.; software, Z.Z.; validation, K.D., Z.Z. and Y.Z.; formal analysis, Y.Z.; investigation, Y.Z.; supervision, Y.Z.; funding acquisition, K.D. and Y.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundation of China (Grant No. 6250021280).
Data Availability Statement
The data supporting the findings of this study are available within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Distributed multi-vehicle coordinated control via local information exchange. Int. J. Robust Nonlinear Control 2007, 17, 1002–1033. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. On Consensus algorithms for double-integrator dynamics. In Distributed Consensus in Multi-Vehicle Cooperative Control; Springer: London, UK, 2008; pp. 77–104. [Google Scholar] [CrossRef]
- Wang, H.; Chen, J. Consensus control for high-order multi-agent systems. IET Control Theory Appl. 2011, 5, 231–238. [Google Scholar] [CrossRef]
- You, K.; Xie, L. Necessary and sufficient conditions for consensusability of linear multi-agent systems. IEEE Trans. Autom. Control 2010, 55, 1263–1268. [Google Scholar] [CrossRef]
- Wang, X.H.; Ji, H.B. Leader-follower consensus for a class of nonlinear multi-agent systems. Int. J. Control Autom. Syst. 2012, 10, 27–35. [Google Scholar] [CrossRef]
- Lyu, J.; Hu, J.; Gao, D.; Liu, Q. Consensus for constrained multi-agent systems with input saturation. Int. J. Robust Nonlinear Control 2016, 26, 2977–2993. [Google Scholar] [CrossRef]
- Altafini, C. Consensus problems on networks with antagonistic interactions. IEEE Trans. Autom. Control 2013, 58, 935–946. [Google Scholar] [CrossRef]
- Hu, J.; Zheng, W.X. Bipartite consensus for multi-agent systems on directed signed networks. In Proceedings of the 52nd IEEE Conference on Decision and Control, Florence, Italy, 10–13 December 2013; pp. 3451–3456. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, J. Bipartite consensus of general linear multi-agent systems. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 808–812. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, H.W.; Chen, J. Sign-consensus of linear multi-agent systems over signed directed graphs. IEEE Trans. Ind. Electron. 2017, 64, 3–14. [Google Scholar] [CrossRef]
- Qin, J.; Fu, W.; Zheng, W.X. On the bipartite consensus for generic linear multiagent systems with input saturation. IEEE Trans. Cybern. 2017, 47, 1948–1958. [Google Scholar] [CrossRef]
- Wen, G.; Wang, H.; Yu, X.; Yu, W. Bipartite tracking consensus of linear multi-agent systems with a dynamic leader. IEEE Trans. Circuits Syst. II Exp. Briefs 2018, 65, 1204–1208. [Google Scholar] [CrossRef]
- Guo, X.; Lu, J.; Alsaedi, A. Bipartite consensus for multi-agent systems with antagonistic interactions and communication delays. Phys. A 2018, 495, 488–497. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, S.; Ma, J.; Zheng, Y. Bipartite consensus in networks of agents with antagonistic interactions and quantization. IEEE Trans. Circuits Syst. II Exp. Briefs 2018, 65, 2012–2016. [Google Scholar] [CrossRef]
- Gong, Z.; Yang, F.; Yuan, Y.; Ma, Q.; Zheng, W.X. Secure formation control of multiagent system against FDI attack using fixed-time convergent reinforcement learning. IEEE Trans. Control Netw. Syst. 2025, 12, 1203–1214. [Google Scholar] [CrossRef]
- Canese, L.; Cardarilli, G.C.; Di Nunzio, L.; Fazzolari, R.; Giardino, D.; Re, M.; Spanò, S. Multi-agent reinforcement learning: A review of challenges and applications. Appl. Sci. 2021, 11, 4948. [Google Scholar] [CrossRef]
- Albert, A. Comparison of event-triggered and time-triggered concepts with regard to distributed control systems. In Proceedings of the Embedded World Conference, Nuremberg, Germany, 17–19 February 2004; pp. 235–252. [Google Scholar]
- Hu, Z.; Su, R.; Zhang, K.; Xu, Z.; Ma, R. Resilient event-triggered model predictive control for adaptive cruise control under sensor attacks. IEEE/CAA J. Autom. Sin. 2023, 10, 807–809. [Google Scholar] [CrossRef]
- Tabuada, P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control 2007, 52, 1680–1685. [Google Scholar] [CrossRef]
- Dimarogonas, D.V.; Frazzoli, E.; Johansson, K.H. Distributed event-triggered control for multi-agent systems. IEEE Trans. Autom. Control 2012, 57, 1291–1297. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, G.; Wang, Y.; Song, C. Distributed event-triggered control of multi-agent systems with combinational measurements. Automatica 2013, 49, 671–675. [Google Scholar] [CrossRef]
- Seyboth, G.S.; Dimarogonas, D.V.; Johansson, K.H. Event-based broadcasting for multi-agent average consensus. Automatica 2013, 49, 245–252. [Google Scholar] [CrossRef]
- Cao, M.; Xiao, F.; Wang, L. Event-based second-order consensus control for multi-agent systems via synchronous periodic event detection. IEEE Trans. Autom. Control 2015, 60, 2452–2457. [Google Scholar] [CrossRef]
- Li, H.; Liao, X.; Huang, T.; Zhu, W. Event-triggering sampling based leader-following consensus in second-order multiagent systems. IEEE Trans. Autom. Control 2015, 60, 1998–2003. [Google Scholar] [CrossRef]
- Mu, N.; Liao, X.; Huang, T. Event-based consensus control for a linear directed multiagent system with time delay. IEEE Trans. Circuits Syst. II Exp. Briefs 2015, 62, 281–285. [Google Scholar] [CrossRef]
- Xu, W.; Ho, D.W.C.; Li, L.; Cao, J. Event-triggered schemes on leader-following consensus of general linear multiagent systems under different topologies. IEEE Trans. Cybern. 2017, 47, 212–223. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Chen, X.; Hao, F.; Xie, J. Event-triggered bipartite consensus for multi-agent systems with antagonistic interactions. Int. J. Control Autom. Syst. 2019, 17, 2046–2058. [Google Scholar] [CrossRef]
- Du, X.; Qu, S.; Zhang, H.; Xu, W.; Tang, Q. Distributed bipartite consensus for multi-agent systems with dynamic event-triggered mechanism. J. Frankl. Inst. 2023, 360, 8877–8897. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, S.; Zhong, J. A prescribed-time consensus algorithm for distributed time-varying optimization based on multiagent systems. Mathematics 2025, 13, 2190. [Google Scholar] [CrossRef]
- Yang, J.; Li, R.; Gan, Q.; Huang, X. Zero-sum-game-based fixed-time event-triggered optimal consensus control of multi-agent systems under FDI attacks. Mathematics 2025, 13, 543. [Google Scholar] [CrossRef]
- Liberzon, D.; Morse, A.S. Basic problems in stability and design of switched systems. IEEE Control Syst. Mag. 1999, 19, 59–70. [Google Scholar] [CrossRef]
- Sun, Z.; Ge, S.S. Switched Linear Systems: Control and Design; Springer: London, UK, 2005. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, L. Consensus of switched multiagent systems. IEEE Trans. Circuits Syst. II Exp. Briefs 2016, 63, 314–318. [Google Scholar] [CrossRef]
- Wang, Q.; He, W.; Zino, L.; Tan, D.; Zhong, W. Bipartite consensus for a class of nonlinear multi-agent systems under switching topologies: A disturbance observer-based approach. Neurocomputing 2022, 488, 130–143. [Google Scholar] [CrossRef]
- Wu, Z.; Xu, Y.; Lu, R.; Wu, Y.; Huang, T. Event-triggered control for consensus of multiagent systems with fixed/switching topologies. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1736–1746. [Google Scholar] [CrossRef]
- Zhang, W.; Tang, Y.; Liu, Y.; Kurths, J. Event-triggering containment control for a class of multi-agent networks with fixed and switching topologies. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 619–629. [Google Scholar] [CrossRef]
- Yu, J.; Ahn, C.K.; Shi, P. Event-triggered bipartite consensus for fuzzy multiagent systems under Markovian switching signed topology. IEEE Trans. Fuzzy Syst. 2022, 30, 2610–2620. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.