
Nonlinear Dynamics of a Coupled Electromechanical Transmission



Abstract
1. Introduction
2. Dynamical Model
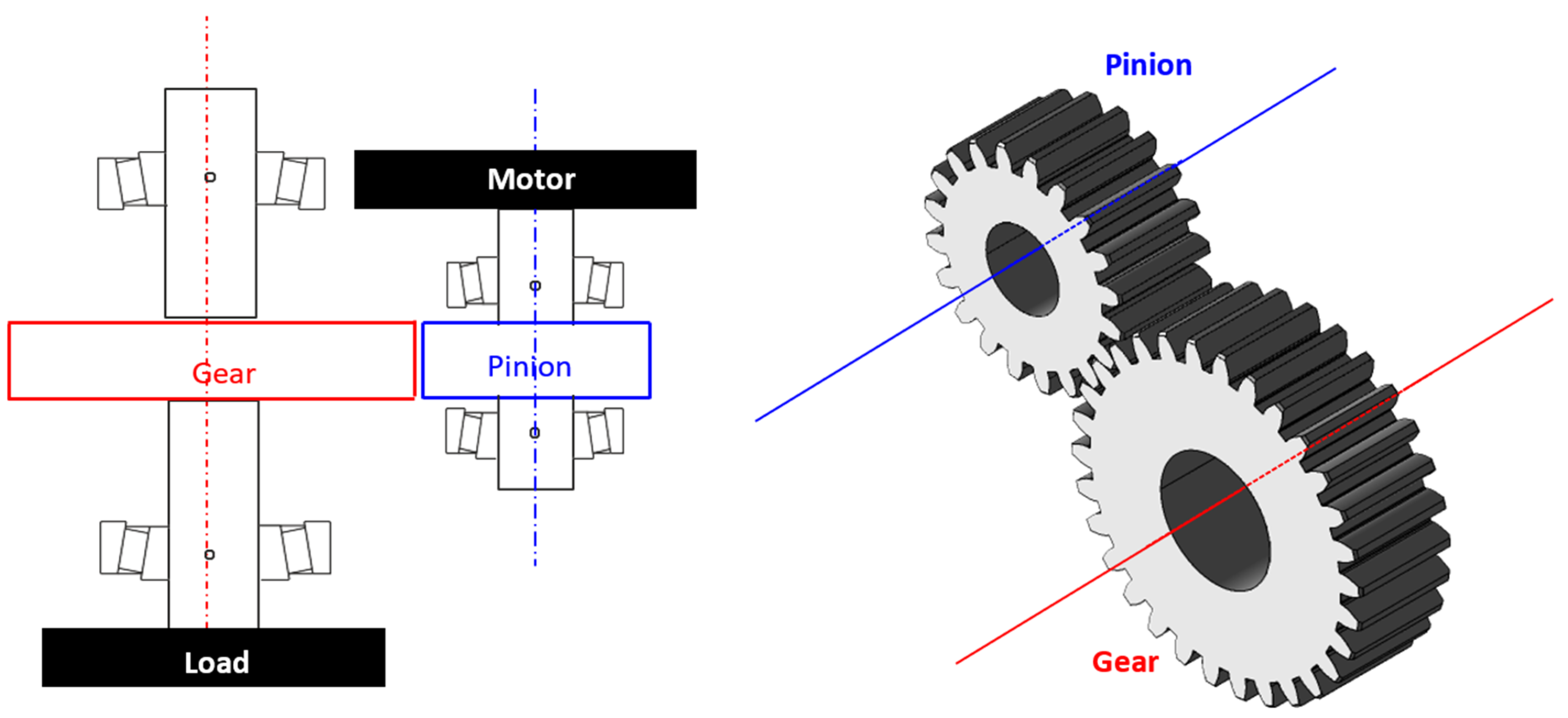
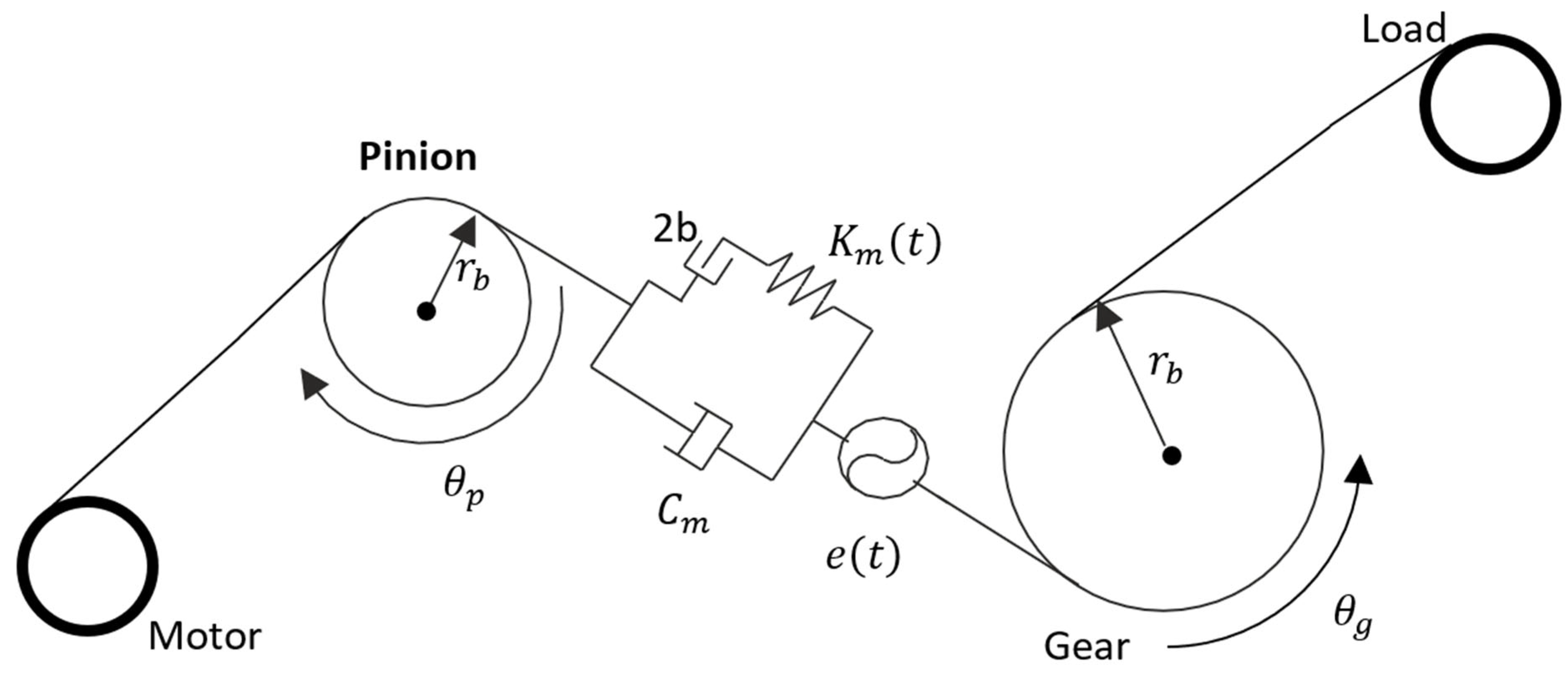
2.1. Gear Pair Dynamical Model
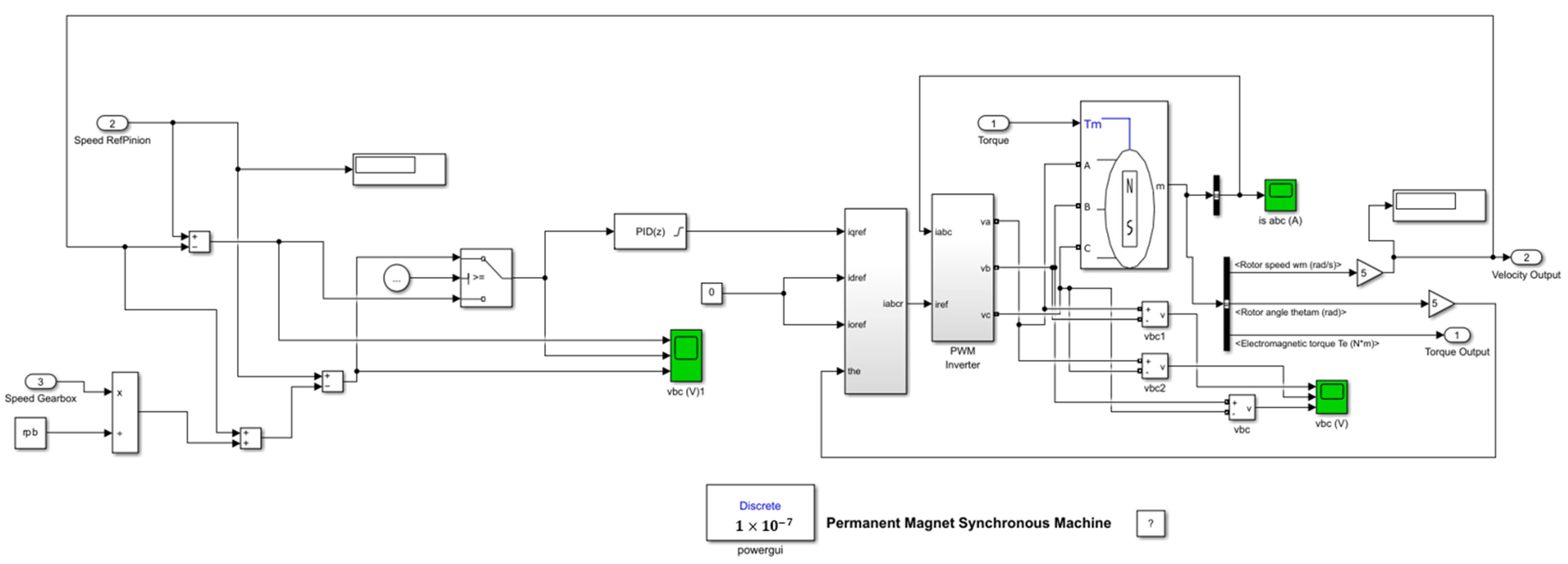
2.2. Model of the Electric Motor
3. Numerical Results
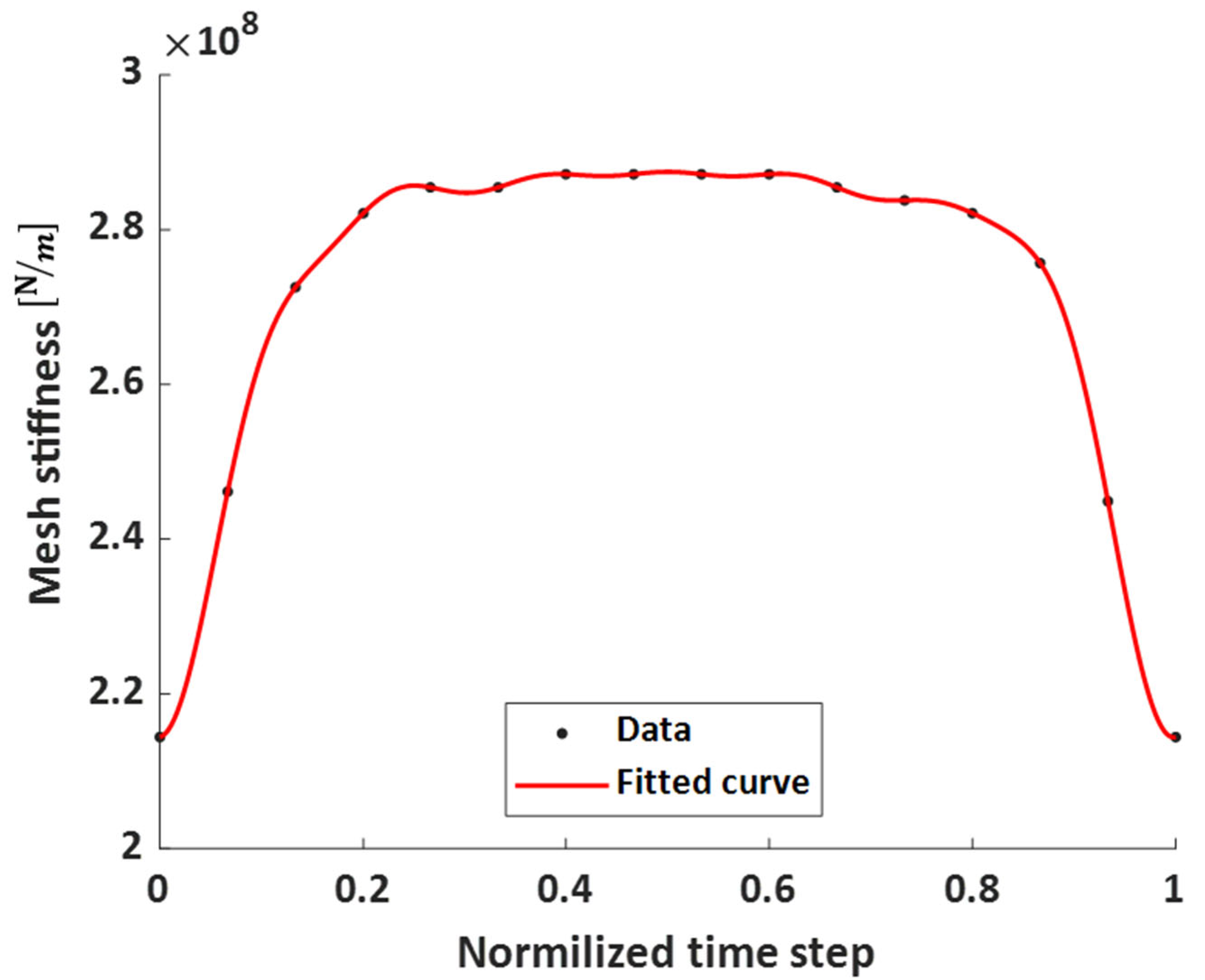
3.1. Validation of the Nonlinear Gear Model
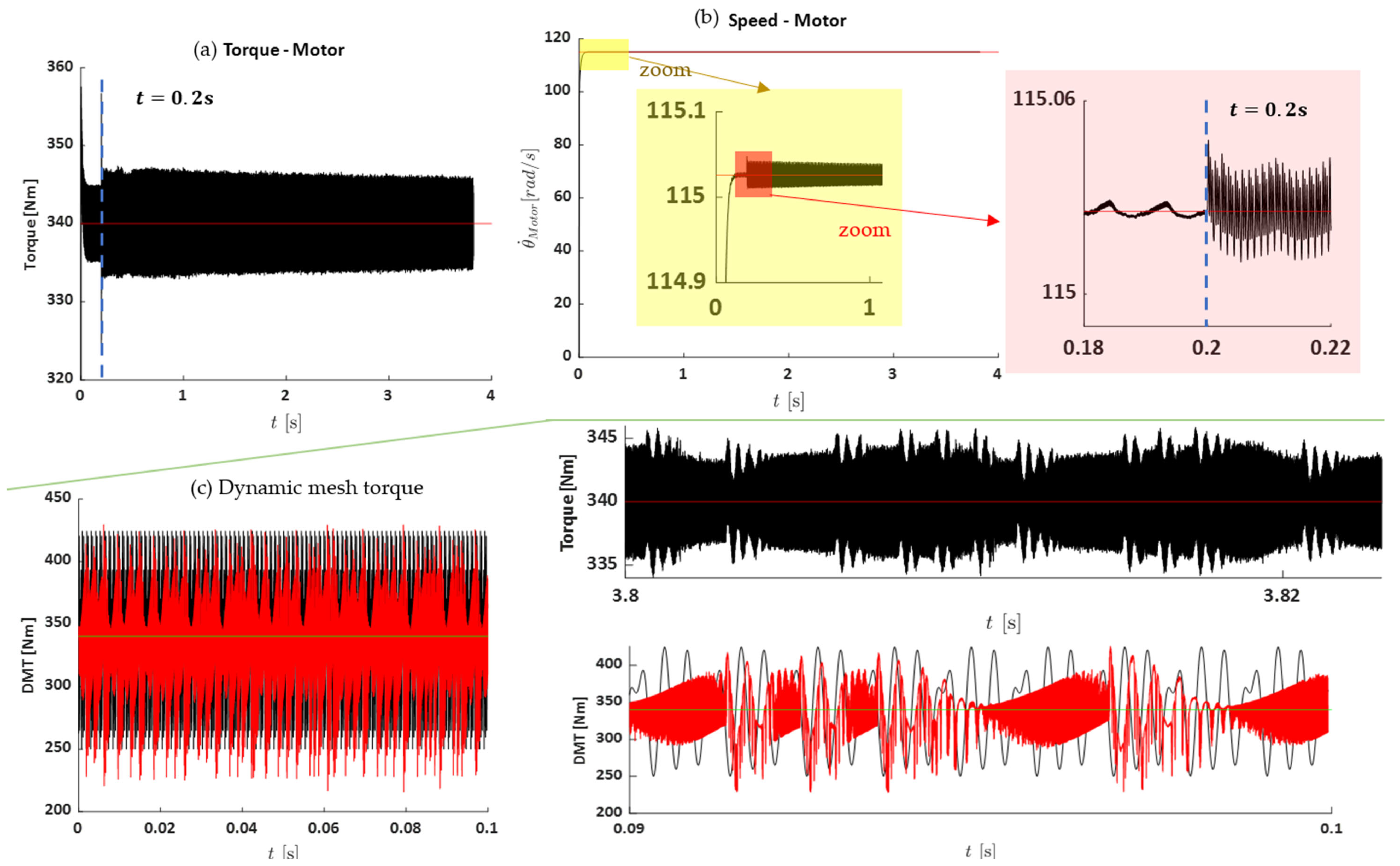
3.2. Dynamic Mesh Torque, Output Torque, and Speed of Motor
3.3. Dynamic Response of the Systems
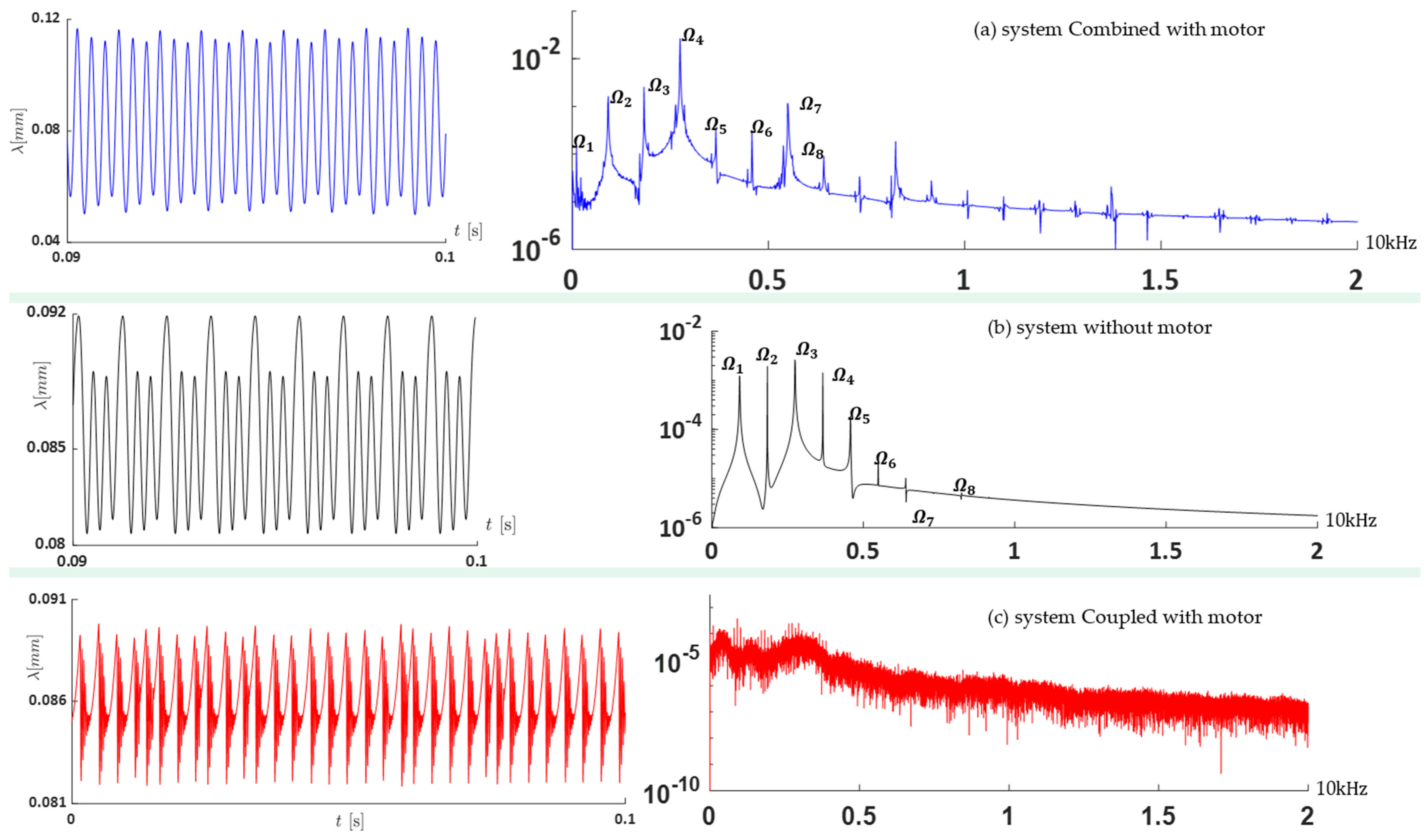
- System without the motor:
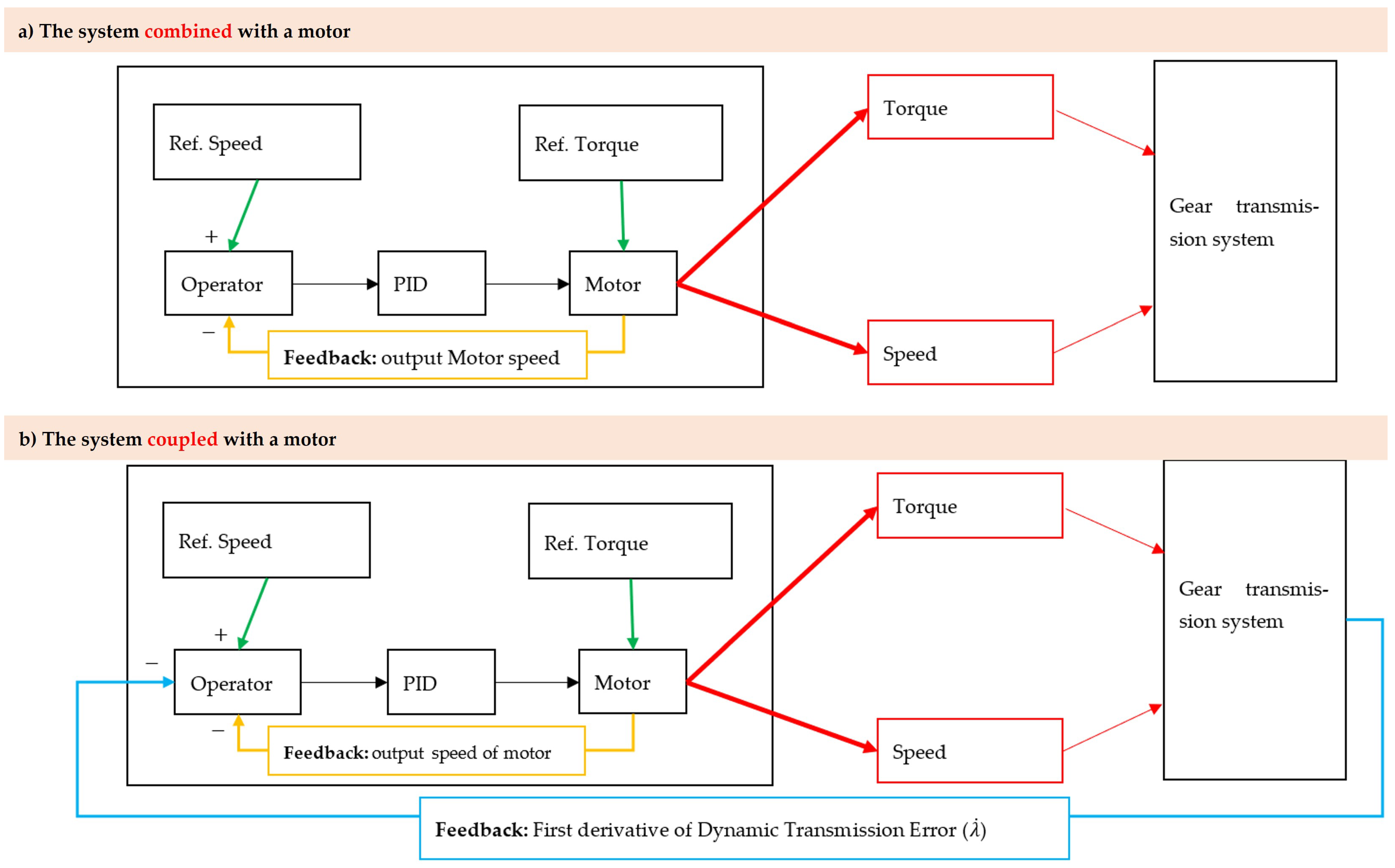
- Combined system:
- Coupled system:
Dynamics of the Systems Under High and Low Levels of Torque
3.4. Spectral Analysis
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
List of Symbols
| L | Armature inductance |
| R | Resistance of the stator windings |
| Lq, Ld | q-axis and d-axis inductances |
| Electromagnetic torque | |
| iq1, id1 | q1-axis and d1-axis currents |
| vq1, vd1 | q1-axis and d1-axis voltages |
| iq2, id2 | q2-axis and d2-axis currents |
| vq2, vd2 | q2-axis and d2-axis voltages |
| ωm | Angular velocity of the rotor |
| λ | Amplitude of the flux induced by the permanent magnets of the rotor in the stator phases |
| p | Number of pole pairs |
| , | Momentum inertia of the gear and pinion |
| , | Pitch radius of gear and pinion, respectively |
| , | Rotational degree of freedom for the pinion and gear |
| Input torque | |
| Output torque | |
| Dynamic transmission error | |
| Geometric transmission error | |
| Mesh stiffness | |
| Backlash function | |
| Input speed | |
| Teeth number of pinion | |
| Equivalent mass | |
| Equivalent torque | |
| Damping |
References
- Qian, J.; Ji, C.; Pan, N.; Wu, J. Improved Sliding Mode Control for Permanent Magnet Synchronous Motor Speed Regulation System. Appl. Sci. 2018, 8, 2491. [Google Scholar] [CrossRef]
- Xu, D.; Wang, T.; Liu, J.; Wei, H. Research on Optimal-Torque Control Method of Permanent Magnet Synchronous Motor. In Proceedings of the 2008 3rd IEEE Conference on Industrial Electronics and Applications, Singapore, 3–5 June 2008; pp. 1229–1233. Available online: https://ieeexplore.ieee.org/document/4582715 (accessed on 25 April 2025).
- Zhang, G.; Yu, W.; Hua, W.; Cao, R.; Qiu, H.; Guo, A. The Design and Optimization of an Interior, Permanent Magnet Synchronous Machine Applied in an Electric Traction Vehicle Requiring a Low Torque Ripple. Appl. Sci. 2019, 9, 3634. [Google Scholar] [CrossRef]
- Sreejeth, M.; Singh, M.; Kumar, P. Particle swarm optimisation in efficiency improvement of vector controlled surface mounted permanent magnet synchronous motor drive. IET Power Electron. 2015, 8, 760–769. [Google Scholar] [CrossRef]
- Wang, S.C.; Nien, Y.C.; Huang, S.M. Multi-Objective Optimization Design and Analysis of V-Shape Permanent Magnet Synchronous Motor. Energies 2022, 15, 3496. [Google Scholar] [CrossRef]
- Sun, X.; Hu, C.; Lei, G.; Guo, Y.; Zhu, J. State Feedback Control for a PM Hub Motor Based on Gray Wolf Optimization Algorithm. IEEE Trans. Power Electron. 2020, 35, 1136–1146. [Google Scholar] [CrossRef]
- Shang, D.X.; Liu, Y.C.; Sun, F.J.; Zhang, H.Y. Study on DTC-SVM of PMSM Based on Propeller Load Characteristic. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 6445–6449. Available online: https://ieeexplore.ieee.org/document/4593905 (accessed on 25 April 2025).
- Molaie, M.; Deylaghian, S.; Iarriccio, G.; Samani, F.S.; Zippo, A.; Pellicano, F. Planet Load-Sharing and Phasing. Machines 2022, 10, 634. [Google Scholar] [CrossRef]
- Jędryczka, C.; Danielczyk, D.; Szeląg, W. Torque Ripple Minimization of the Permanent Magnet Synchronous Machine by Modulation of the Phase Currents. Sensors 2020, 20, 2406. [Google Scholar] [CrossRef]
- Dai, Y.; Lee, H.J. Torque Ripple and Electromagnetic Vibration Suppression of Fractional Slot Distributed Winding ISG Motors by Rotor Notching and Skewing. Energies 2024, 17, 4964. [Google Scholar] [CrossRef]
- Hu, J.; Peng, T.; Jia, M.; Yang, Y.; Guan, Y. Study on Electromechanical Coupling Characteristics of an Integrated Electric Drive System for Electric Vehicle. IEEE Access 2019, 7, 166493–166508. [Google Scholar] [CrossRef]
- Jiang, S.; Li, W.; Wang, Y.; Yang, X.; Xu, S. Study on electromechanical coupling torsional resonance characteristics of gear system driven by PMSM: A case on shearer semi-direct drive cutting transmission system. Nonlinear Dyn. 2021, 104, 1205–1225. [Google Scholar] [CrossRef]
- Ge, S.; Hou, S.; Yao, M. Electromechanical Coupling Dynamic Characteristics of the Dual-Motor Electric Drive System of Hybrid Electric Vehicles. Energies 2023, 16, 3190. [Google Scholar] [CrossRef]
- Guo, D.; Huang, D.; Ge, S.; Wang, Y.; Shen, Q. Vibration characteristics of electric drive system considering rotor-step skewing. Proc. Inst. Mech. Eng. Part D 2024, 238, 4142–4153. [Google Scholar] [CrossRef]
- Xie, Y.; Lim, K.; Liu, H.; Zhan, Z.; Ren, X.; Li, X.; Zhou, R.; Gao, P.; Xiang, C. Modelling of electromechanical coupling dynamics for high-speed EHT system used in HEV and characteristics analysis. Appl. Math. Model. 2024, 136, 115614. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Z.; Yang, J.; Zhang, Y.; Pu, W. Electromechanical dynamic behavior of gear systems caused by transient mixed lubrication of rubbing surface. Tribol. Int. 2025, 204, 110459. [Google Scholar] [CrossRef]
- Dou, J.; Li, Z.; Yao, H.; Ding, M.; Wei, G. Torsional vibration suppression and electromechanical coupling characteristics of electric drive system considering misalignment. Appl. Math. Mech. 2024, 45, 1987–2010. [Google Scholar] [CrossRef]
- Li, H.; Guo, Y.; Xu, Q. PMSM Torque Ripple Suppression Method Based on SMA-Optimized ILC. Sensors 2023, 23, 9317. [Google Scholar] [CrossRef] [PubMed]
- Müller, K.; Wanke, A.; Burkhardt, Y.; Gersem, H.D. Evaluation of Torque Ripple and Tooth Forces of a Skewed PMSM by 2D and 3D FE Simulations. arXiv 2025. Available online: http://arxiv.org/abs/2503.16279 (accessed on 30 April 2025).
- Bai, W.; Qin, D.; Wang, Y.; Lim, T.C. Dynamic characteristic of electromechanical coupling effects in motor-gear system. J. Sound Vib. 2018, 423, 50–64. [Google Scholar] [CrossRef]
- Yi, Y.; Qin, D.; Liu, C. Investigation of electromechanical coupling vibration characteristics of an electric drive multistage gear system. Mech. Mach. Theory 2018, 121, 446–459. [Google Scholar] [CrossRef]
- Ge, S.; Qiu, L.; Zhang, Z.; Wang, H.; Hu, M. Electromechanical coupling dynamic characteristics of electric drive system for electric vehicle. Nonlinear Dyn. 2024, 112, 6101–6136. [Google Scholar] [CrossRef]
- Chen, X.; Yuan, S.; Peng, Z. Nonlinear vibration for PMSM used in HEV considering mechanical and magnetic coupling effects. Nonlinear Dyn. 2015, 80, 541–552. [Google Scholar] [CrossRef]
- Molaie, M.; Samani, F.S.; Zippo, A.; Pellicano, F. Spiral Bevel Gears: Nonlinear dynamic model based on accurate static stiffness evaluation. J. Sound Vib. 2023, 544, 117395. [Google Scholar] [CrossRef]
- Molaie, M.; Samani, F.S.; Zippo, A.; Iarriccio, G.; Pellicano, F. Spiral bevel gears: Bifurcation and chaos analyses of pure torsional system. Chaos Solitons Fractals 2023, 177, 114179. [Google Scholar] [CrossRef]
- Anuradha, G.; Sagi, R.P.; Shakya, P.; Sekhar, A.S. Influence of Geometric Parameters on the Dynamic Performance of Spiral Bevel Gear. J. Vib. Eng. Technol. 2024, 12, 9097–9111. [Google Scholar] [CrossRef]
- Molaie, M.; Zippo, A.; Pellicano, F. Chaotic dynamics of spiral bevel gears. Int. J. Non-Linear Mech. 2025, 175, 105098. [Google Scholar] [CrossRef]
- Molaie, M.; Samani, F.S.; Pellicano, F. Spiral Bevel Gears Nonlinear Vibration Having Radial and Axial Misalignments Effects. Vibration 2021, 4, 666–678. [Google Scholar] [CrossRef]
- Grenier, D.; Dessaint, L.A.; Akhrif, O.; Bonnassieux, Y.; Le Pioufle, B. Experimental nonlinear torque control of a permanent-magnet synchronous motor using saliency. IEEE Trans. Ind. Electron. 1997, 44, 680–687. [Google Scholar] [CrossRef]
- Toliyat, H.A. Analysis and Simulation of Multi-Phase Variable Speed Induction Motor Drives Under Asymmetrical Connections. In Proceedings of the Applied Power Electronics Conference APEC ’96, San Jose, CA, USA, 3–7 March 1996; Volume 2, pp. 586–592. Available online: https://ieeexplore.ieee.org/abstract/document/500500 (accessed on 25 April 2025).
- Baudart, F.; Labrique, F.; Matagne, E.; Telteu, D.; Alexandre, P. Control Under Normal and Fault Tolerant Operation of Multiphase SMPM Synchronous Machines with Mechanically and Magnetically Decoupled Phases. In Proceedings of the 2009 International Conference on Power Engineering, Energy and Electrical Drives, Lisbon, Portugal, 18–20 March 2009; pp. 461–466. Available online: https://ieeexplore.ieee.org/abstract/document/4915200 (accessed on 25 April 2025).
- Kahraman, A.; Blankenship, G.W. Experiments on Nonlinear Dynamic Behavior of an Oscillator with Clearance and Periodically Time-Varying Parameters. J. Appl. Mech. 1997, 64, 217–226. [Google Scholar] [CrossRef]
- Bonori, G.; Pellicano, F. Non-smooth dynamics of spur gears with manufacturing errors. J. Sound Vib. 2007, 306, 271–283. [Google Scholar] [CrossRef]
- Blankenship, G.W.; Kahraman, A. Steady state forced response of a mechanical oscillator with combined parametric excitation and clearance type non-linearity. J. Sound Vib. 1995, 185, 743–765. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tooth Parameters | Pinion | Gear |
|---|---|---|
| No. of teeth | 50 | 50 |
| Module [mm] | 3 | 3 |
| Pressure angle [Deg] | 20 | 20 |
| Base diameter [mm] | 140.95 | 140.95 |
| Tooth thickness at pitch diameter [mm] | 4.64 | 4.64 |
| Outer diameter [mm] | 156 | 156 |
| Root diameter [mm] | 140.68 | 140.68 |
| Face width [mm] | 20 | 20 |
| Inertia [kg m2] | 0.0074 | 0.0074 |
| Backlash [mm] | 0.1447 | |
| Center distance [mm] | 150 | |
| Damping ratio [34] | 0.01 | |
| Combined | Without | Coupled | ||||
|---|---|---|---|---|---|---|
[Hz] | [Hz] | [Hz] | ||||
| 1 | 110 | 6 | 920 | 50 | 110 | 6 |
| 2 | 910 | 50 | 1830 | 100 | 370 | 20 |
| 3 | 1830 | 100 | 2741 | 150 | 910 | 50 |
| 4 | 2750 | 150 | 3661 | 200 | 2961 | 162 |
| 5 | 3660 | 200 | 4572 | 250 | 3221 | 176 |
| 6 | 4580 | 250 | 5492 | 500 | ||
| 7 | 5500 | 300 | 6403 | 550 | ||
| 8 | 6410 | 350 | 8244 | 450 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zippo, A.; Molaie, M.; Pellicano, F. Nonlinear Dynamics of a Coupled Electromechanical Transmission. Vibration 2025, 8, 34. https://doi.org/10.3390/vibration8030034
Zippo A, Molaie M, Pellicano F. Nonlinear Dynamics of a Coupled Electromechanical Transmission. Vibration. 2025; 8(3):34. https://doi.org/10.3390/vibration8030034
Chicago/Turabian StyleZippo, Antonio, Moslem Molaie, and Francesco Pellicano. 2025. "Nonlinear Dynamics of a Coupled Electromechanical Transmission" Vibration 8, no. 3: 34. https://doi.org/10.3390/vibration8030034
APA StyleZippo, A., Molaie, M., & Pellicano, F. (2025). Nonlinear Dynamics of a Coupled Electromechanical Transmission. Vibration, 8(3), 34. https://doi.org/10.3390/vibration8030034