Abstract
Active matter actively searches for models that allow them to connect the behavior of multiple agents to particle system with a physical law. However, the arsenal of models used to model active matter systems is very restricted. Modern differential equation discovery approaches allow one to extract governing equations from data for a single particle in the form of the ODE. However, there is still the question of how to model at the meso- and macroscales. This paper presents a data-driven framework for extracting the governing physical laws of a hardware-made swarm across multiple scales of organization. Using the EPDE framework, we transition from a discrete, chaotic trajectory of individual agents to a continuous, effective field theory of the collective. We show that augmenting the symbolic search space with interaction-aware tokens allowed for the derivation of stochastic partial differential equations (SDEs) that significantly outperformed baseline deterministic models (reducing CRPS by up to 10%). Additionally, we derive a system of SPDEs that governs the macroscale displacement field.
1. Introduction
Active matter is a class of non-equilibrium systems composed of agents that consume internal energy to produce self-propulsion [1,2]. This local decentralized energy injection fundamentally distinguishes such systems from equilibrium systems governed by thermal fluctuations, placing them intrinsically far from thermodynamic equilibrium [3]. A hallmark of these systems is their ability to exhibit spontaneous complex collective phenomena—such as flocking and pattern formation—from simple local interactions [4].
Theoretically, the constant microscopic energy flux presents a core challenge: developing a macroscopic framework that accurately incorporates the stochasticity inherent in these localized, non-equilibrium processes. Since noise originates from the internal conversion of energy into motion, it is inherently non-thermal and decentralized [5]. For real-world applications, it is necessary to move beyond models with simple additive noise.
Consequently, the non-equilibrium nature of active matter implies a coupling between the system’s state and its noise, often requiring a mathematical description based on stochastic differential equations (SDEs) with multiplicative noise [6]. Identifying the correct non-linear SDEs that capture this coupling between deterministic propulsion and stochastic dissipation is therefore a central objective in modeling active matter. However, traditional analytical derivations often yield rigid, static models that fail to generalize across varying environmental conditions or changing collective states. Because a single, structurally fixed equation cannot capture the full non-stationary spectrum of active swarm behavior, a flexible, data-driven approach becomes indispensable.
The field of active matter offers fertile ground for discovering new models and insights into system dynamics [4,7], making equation discovery particularly valuable. This objective aligns with a broader methodological shift connecting differential equation modeling with swarm-based and evolutionary optimization techniques. For instance, evolutionary algorithms are now extensively applied to optimize numerical schemes, enhance solver stability, and perform robust parameter estimation for complex dynamical systems [8]. Our open-source Evolutionary Partial Differential Equation (EPDE) framework [9] is specifically designed for this purpose, offering a novel approach to uncover non-linear, non-canonical governing equations. Unlike other equation discovery methods [10,11,12,13,14,15], our approach integrates seamlessly with the TEDEouS solver [16], which provides advanced handling of complex systems. Recent advances have enabled us to discover not only equations but also ensembles of equations [17]. Ensembles could be used to formulate models as SDEs, further expanding the arsenal of models for describing active matter. Since particle interactions are inherently stochastic, more robust models such as SDEs may better capture them than deterministic ones.
Recently, machine learning [18] and analytical [19,20,21] methods have been applied to devise macroscopic active hydrodynamics equations from microscopic single-particle equations for the Vicsek model in two [18,19] and three [20] dimensions or active Brownian particles [18,21]. However, there are numerous types of single-particle motion models [22]. Moreover, in some cases, the precise equations describing single-particle motion observed in experiments may be unknown or differ from the basic models. Thus, the extraction of such microscopic equations appears prospective for their subsequent use as input data to evaluate the macroscopic characteristics of active matter, e.g., via machine learning [18].
This paper investigates several problems: the motion of a single particle in 2D without external forcing, motion with interactions modeled as external forcing, and the extraction of displacement fields from experimental data using kriging methods to derive partial differential equations (PDEs) and stochastic differential equations (SDEs). Each of these cases is tackled within the unified EPDE framework. As the source of data, we use experiments with swarms of self-propelled Swarmodroid robots [23]. Such swarms of robots that perform basic actions like forward movement [24,25,26,27,28] or self-rotation [29,30,31] are often applied to study various active matter phenomena due to simplicity of extracting their positions and velocities as well as versatility in controlling motion patterns of individual robots [32,33] and interactions between the robots in the swarm [33,34,35,36].
This paper is organized as follows. Section 2 details the background on active matter models (Section 2.1) and equation discovery methods (Section 2.2). Section 3 describes the data extraction process and the equation discovery pipeline, while Section 4 presents our numerical experiments. Section 6 summarizes the findings.
2. Related Work
2.1. Active Matter Models
Active matter systems are commonly modeled using two primary approaches: macroscopic equations such as active hydrodynamics [37] or elasticity theory [38,39] and particle-based microscopic methods that include, for example, molecular dynamics [7,40], kinetic Monte Carlo simulations [41] or cellular automata [34]. While microscopic approaches are more suitable when considering cluster formation or other effects involving low numbers of particles, as well as in order to gain a physical insight into the mechanisms underlying certain macroscopic phenomena, their applications for large-scale simulations of macroscopic active matter systems require extensive computational resources, facilitating the need for developing effective descriptions.
At the macroscopic level, the collective behavior of active matter systems, including self-assembly and structure formation, is typically described by coupled PDEs [7]. These models capture the emergent systemic properties of large numbers of interacting elements, focusing on how individual interactions give rise to collective behaviors. Such properties include phase transitions [42,43] and motility-induced phase separation [44], the formation of topological patterns [29,45], and self-organizing behaviors [33,35,46].
Also interesting is that we can discern significant patterns that reveal essential characteristics of the systems being studied [47]. In first-order linear differential equations, solutions commonly manifest as exponential growth or decay, illustrating how a quantity changes over time under specified conditions. In contrast, the analysis of non-linear differential equations often uncovers more complex dynamics, such as limit cycles and chaotic behavior, which are crucial for understanding natural phenomena, including population dynamics and climate variation. Additionally, investigations of solutions near singular points often reveal critical transitions in system behavior, enabling predictions of the system’s response to varying external influences.
In more complex systems, where numerous agents or particles interact, agent-based modeling is often employed. Here, individual agents represent system elements, each with its own degrees of freedom and dynamic rules. Agent-based models can simulate how localized interaction rules at the microscale can lead to emergent macroscopic behaviors [48], making them a powerful tool for understanding active matter systems.
This modeling paradigm can be compared to the classical methods of describing the motion and deformation of continuous media. In the Lagrangian approach, the focus is on tracking the motion of individual particles in the medium. In contrast, Eulerian approach observes changes at fixed spatial points through which the medium moves [49]. These approaches provide complementary views: Lagrangian models follow individual agents, while Eulerian models focus on the overall system dynamics.
2.2. Equation Discovery
Inference of governing equations from observational data represents a paradigm shift in scientific modeling, moving from first-principles derivation to data-driven discovery [50]. While the conceptual pipeline from microscopic data to macroscopic models is straightforward, its practical implementation faces significant challenges, primarily the high sensitivity of numerical differentiation to measurement noise. Advanced noise handling spurred the development of more robust and physics-informed discovery techniques.
A significant advancement has been the adoption of weak formulations for PDE discovery. Instead of evaluating noisy derivative data point-wise, methods like Weak SINDy (W-SINDy) recast the PDE in an integral form by multiplying it with a set of smooth test functions and integrating over the domain [51]. This integral operation naturally filters noise and allows for the discovery of equations from data that is far too corrupted for standard finite-difference methods.
Furthermore, to ensure the physical plausibility of the discovered models, modern frameworks increasingly incorporate fundamental principles as constraints. Symmetries, invariances, and conservation laws can be embedded directly into the discovery algorithm’s candidate library. For example, by constructing library terms that are explicitly divergence-free, one can enforce the discovery of a mass-conserving model [52]. Conservation laws not only reduce the search space but also guarantee that the resulting equations are consistent with known physics.
Parallel to these efforts, deep learning has introduced powerful alternatives, such as Physics-Informed Neural Networks (PINNs). PINNs embed the structure of a differential equation into the loss function of a neural network, allowing the network to co-learn the solution field and the unknown parameters of the PDE directly from data [53]. These methods are highly flexible and can handle complex geometries and sparse data scenarios common in experimental active matter studies.
Microscopic dynamics is typically modeled using agent-based models, such as the seminal Vicsek model [54], which captures collective motion through local velocity alignment in the presence of noise. The corresponding macroscopic descriptions are often represented by non-linear PDEs, exemplified by the Toner–Tu equations, a cornerstone hydrodynamic model for polar active fluids that predicts unique non-equilibrium phenomena such as anomalous giant number fluctuations and the breakdown of Galilean invariance [55]. For complex, non-dilute, or heterogeneous systems, traditional analytical coarse-graining techniques frequently become intractable. To circumvent this, a modern data-driven framework leveraging machine learning for equation discovery has emerged. First, the micro-to-macro transition involves spatial kernel coarse-graining of microscopic positions () and orientations () to continuous fields (), followed by critical spectral filtering to isolate the slow, long-wavelength collective hydrodynamic modes from noisy, fast components [56,57]. Second, the dynamics of these macro-fields are formulated using Sparse Identification of Non-linear Dynamics (SINDy) or similar equation-discovery algorithms, such as EPDE [58].
3. Proposed Active Matter Modeling Approaches
We consider three distinct levels of description for the robotic swarm system [59]. The microscopic level describes individual agent dynamics using deterministic ordinary differential equations. The mesoscopic level captures interactions within small groups through coupled stochastic differential equations. At the macroscopic level, the swarm is modeled as a continuum field governed by stochastic partial differential equations. We illustrated our structured pipeline in Figure 1.
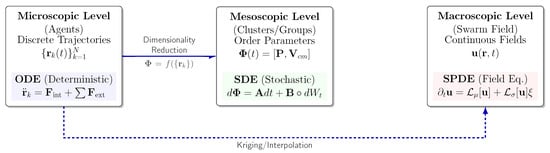
Figure 1.
The multi-scale equation discovery pipeline.
3.1. Ensembling of Differential Equation Models to Form SDE
Our framework, called SAGE (Stochastic Automatic Generative Ensembles), reframes equation discovery as a probabilistic inference task. Instead of finding a single “best-fit” deterministic model, SAGE discovers a symbolic stochastic differential equation that directly captures the system’s dynamics’ uncertainty.
Traditional equation discovery aims to find a single deterministic equation from time series data . The goal is to identify a model of the form:
Here, the terms are functions chosen from a candidate library (e.g., ) and the coefficients are typically simple functions of time (e.g., constants and polynomials).
A known limitation is that this single model fails to capture uncertainty arising from noisy data, an incomplete term library, or differentiation errors. To address this, ensemble methods run the discovery process multiple times (e.g., using bootstrapping) to generate an ensemble of candidate equations, . While the resulting ensemble of solutions can provide a mean and variance, this approach does not analyze the structural properties of the equation ensemble.
SAGE takes a more direct approach by building uncertainty directly into the equation’s structure. We seek a model of the form
The key difference is that the coefficients are treated as random variables or functions, not fixed values. This formulation yields a single, symbolic SDE in which the variability across different potential models is encoded in the equation itself.
To formalize this, we define the coefficients as belonging to a stochastic span (sspan). A term in the sspan of a set of basis functions is a linear combination where the weights are independent random variables, :
This representation is powerful because it connects directly to established SDE theory. Any random coefficient can be decomposed into its mean and a zero-mean stochastic part: . Such decomposition allows us to separate the entire equation into a deterministic (mean) component and a stochastic component:
This structure is equivalent to a Stratonovich SDE. It is theoretically advantageous because the Stratonovich interpretation is well-suited for physical systems where noise arises from unresolved, fast-moving dynamics. Furthermore, the Wong–Zakai theorem ensures that the solution to this SDE can be approximated by solving the ensemble of corresponding ODEs, bridging the gap between the ensemble and the stochastic model .
The SAGE framework is implemented in a multi-stage process, as illustrated below in Figure 2.
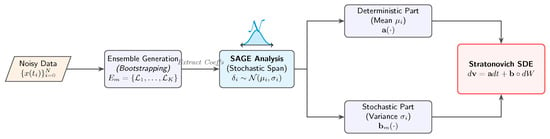
Figure 2.
The SAGE pipeline.
3.2. Pipeline Validation
To demonstrate the efficacy of the SAGE framework, we utilize the classical Lotka–Volterra model as a benchmark for recovering structural uncertainty. This system provides a rigorous test case due to its non-linear coupling and sensitivity to parameter fluctuations, which closely mimic the robotic swarm dynamics described in Section 3. The deterministic evolution of the prey (u) and predator (v) populations is governed by the coupled equations and , where the coefficients represent birth, death, and interaction rates [60]. In this validation scenario, we treat these coefficients not as fixed scalars, but as distributions encapsulating environmental or measurement stochasticity, thereby testing SAGE’s capacity for symbolic recovery under probabilistic constraints.
The validation procedure begins by generating an ensemble of trajectories, , by perturbing the ground-truth parameters with additive Gaussian noise. This synthetic dataset simulates the unresolved dynamics typically encountered in physical experiments. The objective of the SAGE algorithm is to correctly identify the sparse structure of the governing equations—effectively eliminating non-existent terms such as or —while simultaneously estimating the mean and variance of the active coefficients to form a continuous stochastic representation.
We quantify the results by comparing the discovered stochastic differential equation (SDE) against the original perturbed ensemble. Specifically, we assess structural accuracy via the success rate of term selection and distributional fidelity by measuring the overlap between the predicted stochastic flow and the observed data variance. By leveraging the Wong–Zakai theorem (Section 3.1), the framework ensures that the discovered stochastic component, , accurately captures the limits of the ordinary differential equation (ODE) ensemble. This alignment confirms that SAGE yields a mathematically consistent probabilistic model that accounts for underlying system uncertainty, rather than a simple best-fit curve.
The resulting system of equations discovered by the SAGE algorithm is presented in Equation (1):
To benchmark the framework’s performance, we compared the SAGE results against the Ensemble-SINDy (E-SINDy) algorithm [17], which yielded the formulation shown in Equation (2):
For a theoretical baseline, a statistical derivation of the Lotka–Volterra equations from Howard [61] provides the expected parameter values shown in Equation (3):
Comparing the mean coefficient values, the results obtained by SAGE (Equation (1)) align more closely with the theoretical baseline (Equation (3)) than those produced by E-SINDy. This alignment is visualized in Figure 3, which illustrates the recovered population dynamics and the overlap between the predicted stochastic flow and the ground-truth ensemble. While the use of empirical data precludes the existence of a single “correct” equation—meaning both algorithms successfully identify plausible SDEs—SAGE offers a distinct operational advantage. Specifically, E-SINDy requires substantial hyperparameter tuning to achieve these results, whereas SAGE derives the equations autonomously without the need for additional manual calibration.
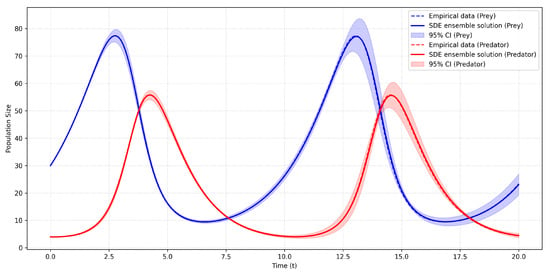
Figure 3.
Comparison of the Lotka–Volterra population dynamics recovered by the SAGE framework against the original perturbed dataset.
3.3. Problem Statement: Microscopic Dynamics
The modeling of complex systems by resolving the dynamics of individual constituents—often termed the microscopic or agent-based perspective—has a history spanning physics, chemistry, and biology. In statistical physics and computational chemistry, this approach is epitomized by molecular dynamics (MD) simulations [62,63]. Here, atoms or molecules are treated as discrete agents whose trajectories evolve according to Newton’s laws, driven by well-defined inter-atomic potentials such as the Lennard–Jones potential [64]. These classical models assume that, if the interaction forces (e.g., van der Waals or electrostatic forces) are known, the material’s macroscopic properties (pressure, temperature, and phase transitions) will naturally emerge from the collective motion of particles.
This paradigm extends to the study of active matter and biological systems, where particles are no longer passive, energy-conserving atoms but energy-consuming agents such as flocking birds, schooling fish, or bacteria. The seminal work by Reynolds on “boids” [65] and the Vicsek model [54] demonstrated that simple, local interaction rules—such as alignment and separation—could reproduce complex group behaviors seen in nature. Unlike in passive chemistry, agents in these systems possess an intrinsic drive (self-propulsion) and interact through sensory inputs rather than physical potentials [37].
In the context of multi-agent robotics, we draw a direct parallel to these physical systems. Robots in a swarm can be viewed as “artificial atoms,” where the governing physics includes both the mechanical constraints of the hardware and the algorithmic rules of interaction [66]. However, a key challenge in analyzing such systems is the “inverse problem”. While we often know the equations for idealized particles, the effective interaction laws for real-world robotic agents or biological entities are frequently unknown or too complex to derive from first principles [67]. Thus, data-driven approaches should be able to discover the underlying laws of motion from observation alone.
At the microscopic scale [59], we aim to discover the governing equations for a single agent, accounting for its intrinsic dynamics and its interactions with neighboring agents. The state of the k-th robot is given by its position and velocity, , where . The forces acting on this agent are decomposed into an intrinsic part, , and a sum of external interactions, , from neighbors within a set . The equation of motion is thus
The SAGE framework is used to learn the functional forms of and from a library of candidate functions. By generating an ensemble of deterministic models from trajectory data, SAGE computes the mean and variance for the coefficients of each term in these functions.
3.4. Problem Statement: Mesoscopic Dynamics
While the microscopic perspective offers a granular view of individual interactions, the high dimensionality of such systems often obscures the emergent, large-scale behavior. To address this, statistical physics uses coarse-graining techniques to bridge the gap between the discrete microscale and the continuum macroscale. This mesoscopic level of description focuses on the evolution of slow-varying order parameters rather than fast-fluctuating individual degrees of freedom [68].
Historically, this approach is rooted in the Landau theory of phase transitions, where a single quantity (such as magnetization) captures the symmetry-breaking behavior of billions of atoms [69]. In active matter, this reductionism has led to successful hydrodynamic theories, such as the Toner–Tu equations [70], which describe flocks as continuous fluids. However, deriving exact mesoscopic SDEs from microscopic rules remains analytically challenging [71].
Here, we model the dynamics not of individual agents but of the system as a whole using a small set of collective variables, or order parameters.
This approach reduces the high-dimensional system of N agents (with degrees of freedom in 2D, considering ) to a low-dimensional system of M collective variables, .
For a swarm of active particles, key order parameters include (1) Polarization vector, , which measures the average degree of velocity alignment (flocking).
(2) Center of mass velocity, , which describes the motion of the swarm as a single entity.
(3) Global angular momentum, , which measures the average degree of swarm rotation.
In the first stage, we compute the time series for these collective variables, , using the full microscopic trajectory data .
In the second stage, we apply our SAGE framework (Sec Section 3.1) to these new, low-dimensional time series . The goal is to discover SDEs that govern the evolution of these order parameters:
where is the deterministic drift (describing, for example, the relaxation of to its steady-state value) and is the diffusion matrix, reflecting the collective variable fluctuations caused by microscopic noise.
Discovering such an SDE system for is of significant value: it allows for the direct modeling of phase transitions (e.g., the transition from disorder, , to flocking, ) and macroscopic system relaxation without resorting to a full N-particle simulation or solving complex SPDEs.
3.5. Problem Statement: Macroscopic Dynamics
To model the emergent collective behavior of the swarm, we transition from a discrete Lagrangian description of individual agents to a continuous Eulerian description of a macroscopic field.
From the set of all agent trajectories , we construct a continuous velocity field . This field represents the average velocity of agents at a given spatial coordinate at time t. This coarse-graining procedure is performed by first averaging agent velocities on a discrete grid and then interpolating these grid points into a continuous field using Kriging. Kriging is selected for its capacity to produce an unbiased, optimal prediction by accounting for the spatial autocorrelation of the underlying data.
The reconstructed field serves as the input data for a second application of the SAGE framework. The objective now is to discover a stochastic partial differential equation (SPDE) that governs the evolution of this field. The library of candidate terms is expanded to include spatial differential operators such as the gradient (∇), divergence (), and Laplacian (). SAGE identifies the terms that best describe the field’s dynamics, yielding an SPDE of the form
Here, the operators are interpreted in the Stratonovich sense: deterministic operator is composed of terms with mean-valued coefficients. It captures the macroscopic, mean-field behavior of the swarm, often corresponding to established physical models like advection-diffusion or reaction-diffusion systems (e.g., ). The stochastic operator is composed of terms with variance-derived coefficients, representing state-dependent stochastic forcing. This term, which can be written as , models the macroscopic fluctuations and emergent noise. It provides a data-driven solution to the closure problem, systematically capturing how the uncertainties from the microscopic agent level propagate up to manifest as large-scale, collective stochastic phenomena.
The derived SPDE can be reviewed as a bridge between the microscopic dynamics of individual robots and the macroscopic properties of the swarm as an active material. The specific form of the operator is expected to reflect the type of emergent collective dynamics and define the effective material parameters of the swarm.
4. Experiments
4.1. Experimental Setup
The data for this study were extracted from experiments performed with the Swarmodroid platform [23] in a self-rotating configuration of individual robots. The experimental setup involves a swarm of 40 vibration-driven robots placed on a flat surface confined by a circular barrier with a diameter 40 cm, Figure 4a. Each robot represents a 3D-printed composite structure consisting of a cylindrical cap with a diameter mm and a height mm, a circular base for the placement of a printed circuit board, and elastic bristles that are arranged around the bottom of the base, Figure 4b,c. The printed circuit board placed at the base of each robot includes an IR receiver that allows for simultaneous turning on and off of all the robots, a vibration motor, a rechargeable battery, and the control electronics. The robot is propelled by vibrational oscillations of the motor, which are converted by the elastic bristles, inclined at to the surface normal [30]. The direction of the bristles’ inclination relative to the normal of the surface on which the robots move determines the rotation chirality of the robots that can rotate clockwise (CW), Figure 4b, or counter-clockwise (CCW), Figure 4c. To ensure zero net chirality of the system, we use 20 clockwise-rotating robots and 20 counter-clockwise ones in the experiment. The experiment is recorded for min using a Sony ZV-E10 HD camera positioned overhead. The Cartesian coordinates and orientation angles of all robots are extracted using the AMPy library [23], which relies on AprilTag markers attached to the top of each robot. Each marker has a size of 3 cm corresponding to a scaling factor of cm per pixel in the image plane. The tracking was performed on a frame-by-frame basis with a sampling rate of 25 Hz, i.e., every s. The raw coordinate data were used without any any additional smoothing. Based on the AprilTag detection accuracy and the spatial resolution, the estimated uncertainty in the extracted positional coordinates is approximately ±1 pixel, which translates to less than mm in physical units. The example of obtained robots’ trajectories is shown in Figure 4d.
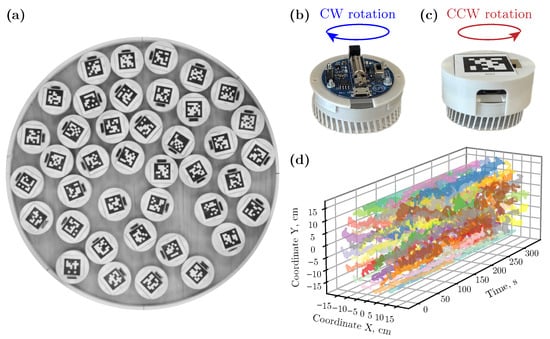
Figure 4.
The experimental platform consisting of a swarm of self-rotating Swarmodroid bristle-robots. (a) The top view of the experimental setup with the swarm of robots constrained by a circular barrier. (b,c) The design of a single bristle-robot (b) without the cap showing the control circuit board and (c) with the cap demonstrating a fully assembled robot. The blue and red arrows indicate the chirality of a robot: (b) a clockwise (CW) rotating robot and (c) a counter-clockwise (CCW) rotating robot. (d) The evolution of the robots’ trajectories in the swarm. Each color corresponds to a different robot.
4.2. Experimental Results: Microscopic Dynamics
Our primary objective was to derive a data-driven model of individual-agent motion that captures both intrinsic self-propulsion and the nuanced forces arising from neighbor interactions. To solve this inverse problem, we employed the SAGE framework powered by the EPDE algorithm. The analysis was performed on empirical trajectory data (), which was normalized and smoothed via a Gaussian filter () to distinguish the signal from the sensor noise.
To support reproducibility and systematically address the sensitivity of the evolutionary search, we implemented a custom physics-constrained grid search algorithm. Rather than relying on generic black-box optimizers, this domain-specific approach sequentially evaluates a predefined hyperparameter space while employing heuristic early-stopping. Specifically, the algorithm explores discrete combinations of preprocessing variables and evolutionary constraints. Candidate models that exhibit severe numerical instability or excessive structural complexity are immediately pruned from the search space. The surviving configurations are strictly ranked based on their approximation error, ensuring the selection of hyperparameters that yield mathematically stable and physically plausible governing equations. The key parameters evaluated during this phase are documented in Table 1.

Table 1.
Key EPDE hyperparameters and the evaluated search space.
Evaluating the variability of the framework across the hyperparameter grid is crucial for robust model discovery. Across the evaluated discrete combinations, the objective function values exhibited significant variability, ranging from 10 to 100. This variance underscores the critical necessity of an automated, physics-aware tuning protocol over arbitrary manual calibration.
To accurately identify the interaction term , we augmented the standard candidate library with external tokens, including trigonometric functions to capture oscillatory modes. We introduced derivative tokens () to represent neighbor state variables (e.g., neighbor velocity ).
To assess the temporal stability of agent behavior, we partitioned the continuous trajectories into four equal segments (–); experimental results demonstrated that this localized partitioning {n_parts = 4) reduces the mean and median RMSE and MAE, thereby increasing the accuracy of local models. The algorithm independently identified the deterministic governing equations for each segment. This analysis revealed a significant evolution in the underlying dynamical structure. Below, we present the discovered average equations for agents 78, 79, and 83. Note that for clarity, we utilize dot notation where :
As demonstrated by Equation (7a–d), the functional form of the acceleration shifts drastically over time. The initial phase () acts as a transient startup governed by simple linear structures. In contrast, the final phase () exhibits complex non-autonomous damping and time-dependent viscous drag. An example of the discovered equation’s solution is shown in Figure 5.
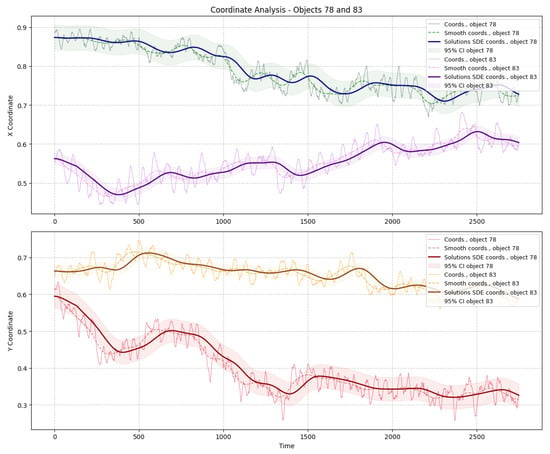
Figure 5.
Representative visualization of the discovered SDE model trajectories compared to real data.
We propose the following physical interpretation of the terms discovered in Equation (7a–d):
Periodic forcing. Trigonometric terms such as and appear consistently across all phases and correspond to the periodic excitation produced by the eccentric vibration motor. Their coupling to velocity (e.g., in and ) indicates that the motor’s oscillatory forcing is modulated by the instantaneous motion state, consistent with the frequency-dependent conversion efficiency of inclined bristles [30].
Velocity-dependent damping. Linear dissipative terms (, ) are present in every phase and represent effective substrate friction acting on the sliding bristle tips. The emergence of time-dependent damping () in later phases (, ) suggests a progressive stiffening of the frictional contact, possibly due to surface wear or battery-induced deceleration of the motor over the course of the experiment.
Cross-coordinate coupling. Mixed terms such as and couple the two spatial degrees of freedom. For self-rotating bristle-bots whose bristles are inclined at a fixed azimuthal angle, the x- and y-accelerations are inherently linked through the rotation chirality of the robot. These cross-terms therefore encode the chiral symmetry breaking that distinguishes clockwise from counter-clockwise agents.
This structural non-stationarity confirms that a single, static ordinary differential equation is insufficient to describe the full behavioral range of the agents [59]. The overall metric increase is shown in Table 2. Importantly, the recurring presence of periodic forcing and linear drag across all phases provides a microscopic origin for the Rayleigh friction (, ) that dominates the macroscopic SPDE derived in Section 4.4, thereby establishing physical consistency across scales.
Table 2.
Validation metrics for discovered SDEs. The “With token” rows denote models discovered using the augmented library that contains a neighbor interaction token.
The introduction of the neighbor-interaction token yields a measurable improvement in both CRPS and RMSE (Table 2), confirming that inter-agent forces are a statistically significant component of single-particle dynamics. Physically, this token encodes short-range repulsive contact forces: when two bristle-bots collide, their rigid cylindrical caps exchange momentum over a timescale much shorter than the tracking interval ( s). The SAGE framework absorbs this impulsive momentum transfer into a mean interaction drift and a collision-frequency-dependent diffusion, consistent with the state-dependent noise introduced at the mesoscopic level (Section 4.3, Equation (10)). This physical picture, periodic self-propulsion attenuated by substrate friction and punctuated by stochastic collisions, provides the microscopic basis from which the mesoscopic and macroscopic descriptions are derived.
4.3. Experimental Results: Mesoscopic Dynamics
Following the multi-scale framework introduced in Section 3, we developed a mesoscopic model for a five-robot subsystem (78, 79, 83, 31, 32). This intermediate scale is crucial because it reveals how pairwise interactions aggregate into group-level motion before transitioning to a fully macroscopic description. While the microscopic model focuses on individual self-propulsion, the mesoscopic model emphasizes how these forces accumulate via Newton’s second law to shape collective behavior.
We represent the positions of all robots by the 10-dimensional vector . To infer the functional form of the forces, we applied the EPDE framework using a physics-informed candidate library. This library included time polynomials (e.g., ) to capture slow drifts, trigonometric terms (e.g., ) for periodic motor forcing, and multi-robot cross-terms (e.g., ) to discover momentum-exchange mechanisms.
The resulting deterministic model, presented in Equation (8), exhibits a rich structure. Each acceleration depends on a non-linear combination of time-varying damping (), periodic forcing, and multi-body coupling. These terms have natural physical interpretations: represents drag that strengthens over time, while mixed products like reflect short bursts of momentum transfer during collisions.
Since we assume unit mass, each acceleration equals the net force. Integrating in time recovers the trajectory:
While Equation (8) fits the data well for specific realizations, its high dimensionality and strong non-linear coupling make it extremely sensitive to initial conditions. This lack of robustness motivates a stochastic formulation. We therefore model the N-agent dynamics using underdamped Langevin equations, , with velocity evolution:
The drift term captures the reproducible, low-order forces identified earlier (e.g., self-propulsion and mean-field repulsion). The diffusion term represents the aggregate effect of the high-order, short-lived interactions seen in the deterministic model. Significantly, is state-dependent, ensuring stochastic forcing naturally increases when robots are close, and collision frequency rises.
It should be noted that the dominant dissipative mechanism identified at the microscopic scale, the velocity-dependent friction of the substrate, persists at the mesoscopic level in the form of the drift term and ultimately manifests itself as the Rayleigh friction terms (, ) in the macroscopic Equations (11) and (12). This consistency across all three levels of description lends physical credibility to the multi-scale pipeline: the same energy-dissipation pathway (vibration → bristle sliding → substrate drag) is recovered independently at each scale by the SAGE framework, rather than being imposed a priori.
4.4. Experimental Results: Macroscopic Dynamics
To characterize the fundamental response properties of the system, we first examined a sparse actuation regime involving a single active agent traversing a field of stationary peers. This configuration effectively approximates a Green’s function test, probing how a localized injection of momentum propagates and dissipates through the collective. The stationary agents act as a resistive porous medium, allowing us to isolate baseline coupling mechanisms. As illustrated in Figure 6, the PDE model discovered via SAGE successfully captures the spatiotemporal decay of this macroscopic velocity field.
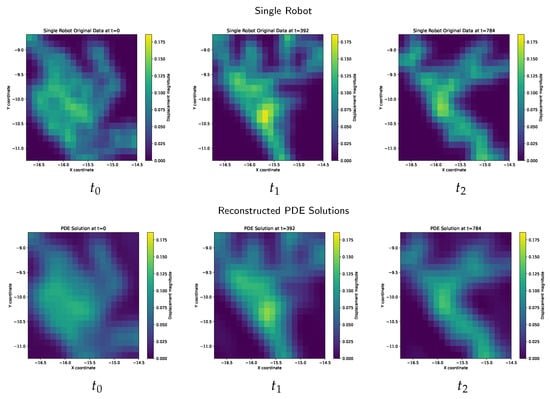
Figure 6.
Spatiotemporal evolution of the single-robot displacement magnitude (top) compared against the SAGE-discovered PDE solution (bottom).
Building on this baseline, we expanded the experiment to a multi-agent ensemble () to investigate emergent collective flow and the non-linear superposition of motion sources. Since the active agents provide discrete Lagrangian trajectories, reconstructing a continuous Eulerian macroscopic velocity field is a prerequisite for PDE discovery, as illustrated in Figure 7. We employed Kriging as the primary interpolation method due to its well-established efficacy in processing spatial fields with irregular sampling.
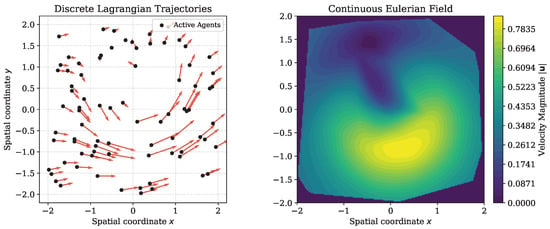
Figure 7.
Transformation of discrete Lagrangian agent trajectories (left) into a continuous Eulerian velocity field (right) via spatial interpolation.
To rigorously address the sensitivity of PDE identification to such data preprocessing, we conducted a robustness evaluation. While the exact numerical precision of the estimated coefficients is inherently linked to the fidelity of the interpolation smoother, our analysis confirms that the qualitative physics remain strictly preserved. Even under varying smoothing parameters, the SAGE algorithm consistently identifies the system as a highly overdamped medium.
Crucially, the deterministic dynamics identified by SAGE for the field components depart from standard diffusive transport models often associated with swarm density. Instead, the governing equations align with the structure of damped, linearized Euler equations, typical of active fluids navigating a resistive environment:
where the residuals are negligible ().
Physically, this system describes momentum transport. The first-order spatial derivatives () capture convective flux and pressure-gradient couplings. However, the dynamics are notably dominated by the zero-order terms (), which correspond to Rayleigh friction (linear drag). This linear term dominance suggests that the “effective fluid” is highly overdamped, losing momentum rapidly to the substrate and stationary agents. The isolated second-order term () acts as an anisotropic viscous correction, regularizing the flow.
A critical concern in data-driven PDE discovery is the reproducibility of the identified operators across different experimental runs. To validate the generality of the macroscopic SPDE and ensure the framework does not overfit to a single spatial configuration, we conducted repeated trials with randomized initial robot distributions and varying population densities. As summarized in Table 3, while exact numerical coefficients exhibit minor variances due to the stochastic nature of active matter, the symbolic structure of the recovered equations remains remarkably robust. The same dominant physical mechanisms—specifically Rayleigh friction and spatial coupling—are consistently identified across independent trials. Notably, as agent density increases (), the system shifts from a convective to a diffusive-dissipative regime, yet the fundamental zero-order dissipation terms remain a permanent fixture of the macroscopic description.
Table 3.
Structural robustness of the discovered PDE across different experimental trials and agent densities.
While Equations (11) and (12) define the mean-field rheology, they cannot account for the intrinsic variance arising from the discrete nature of the agents. To capture this, we move beyond a purely deterministic description. The model fit shown in Figure 8 validates this approach.
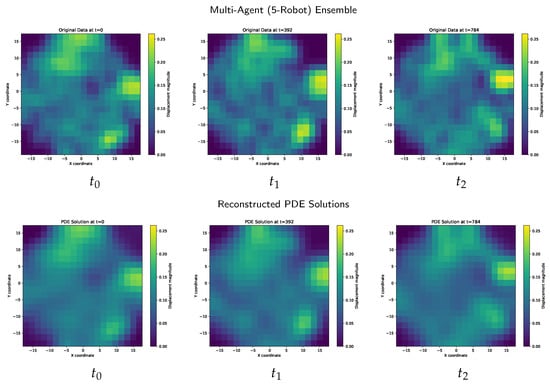
Figure 8.
Comparison between observed displacement magnitude for the 5-robot experiment (top) and the discovered PDE solution (bottom).
The generalized dynamics of the 2D velocity field are therefore formalized as a system of coupled stochastic partial differential equations (SPDEs). This formulation is consistent with the theory offluctuating hydrodynamics, where active fluctuations replace thermal noise:
5. Future Work
Building upon the identification of stochastic mesoscopic and macroscopic dynamics, future research will extend this framework to the topological analysis of agent trajectories. Specifically, we aim to map the collision dynamics of the robotic swarm to the theory of dynamic billiards on higher-dimensional manifolds. By treating the state space of the N-robot system as a configuration manifold, the collective evolution can be reinterpreted through the lens of braid theory, where the world-lines of agents are entangled in (2 + 1)-dimensional spacetime.
The transition from the deterministic scattering observed in the mesoscopic regime to the effective SPDE derived in Section 4.4 suggests a non-trivial connection to stochastic modifications of braid group statistics. We propose investigating how the discovered stochastic forcing terms () affect the system’s topological entropy. This analysis aims to derive a stochastic partial differential equation that governs not only the velocity field but also the evolution of topological invariants (such as braid words).
6. Conclusions
In this work, we have demonstrated a comprehensive, data-driven framework for extracting the governing physical laws of a swarm across multiple scales of organization. Using the SAGE framework, we successfully transitioned from the discrete, chaotic trajectories of individual agents to a continuous, effective field theory of the collective.
We showed that augmenting the symbolic search space with interaction-aware tokens allowed for the derivation of stochastic differential equations (SDEs) that significantly outperformed baseline deterministic models (reducing CRPS by up to 10%), confirming that intrinsic vibrational noise and neighbor coupling are inextricably linked in the robot’s propulsion mechanism.
Additionally, we derived a system of SPDEs that governs the swarm’s displacement field. This result is particularly significant, as it provides an interpretable continuum-physical model, analogous to active-matter hydrodynamics, without relying on prior phenomenological assumptions. The discovery of diffusive and reactive terms confirms that the swarm acts as a dissipative medium where local disturbances propagate and decay according to identifiable laws.
Author Contributions
Conceptualization, A.H.; methodology, validation, resources, project administration, funding acquisition, A.H. and N.O.; software, X.B.; formal analysis, investigation, X.B. and A.M.; data curation, A.M.; writing—original draft preparation, X.B., A.M., N.O. and A.H.; writing—review and editing, A.H.; visualization, X.B.; supervision, A.H. All authors have read and agreed to the published version of the manuscript.
Funding
This work supported by the Ministry of Economic Development of the Russian Federation (IGK 000000C313925P4C0002), agreement No139-15-2025-010.
Data Availability Statement
The code and data to reproduce the experiments are available in the repository https://github.com/ITMO-NSS-team/MAKE_robots (accessed on 9 March 2026) in open access mode.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| SDE | Stochastic differential equation |
| PDE | Partial differential equation |
| EPDE | Evolutionary partial differential equation |
| SPDE | Stochastic partial differential equation |
| PINN | Physics-informed neural networks |
| CRPS | Continuous ranked probability score |
| RMSE | Root mean square error |
References
- Menon, G.I. Active matter. In Rheology of Complex Fluids; Springer: New York, NY, USA, 2010; pp. 193–218. [Google Scholar] [CrossRef]
- Vicsek, T.; Zafeiris, A. Collective motion. Phys. Rep. 2012, 517, 71–140. [Google Scholar] [CrossRef]
- Johnsrud, M.K.; Golestanian, R. Fluctuation dissipation relations for active field theories. Phys. Rev. Res. 2025, 7, L032053. [Google Scholar] [CrossRef]
- Bechinger, C.; Di Leonardo, R.; Löwen, H.; Reichhardt, C.; Volpe, G.; Volpe, G. Active particles in complex and crowded environments. Rev. Mod. Phys. 2016, 88, 045006. [Google Scholar] [CrossRef]
- Zhou, Y.; Ding, T.; Xu, G.; Yang, S.; Qiu, C.W.; He, J.; Ho, G.W. Sustainable heat harvesting via thermal nonlinearity. Nat. Rev. Phys. 2024, 6, 769–783. [Google Scholar] [CrossRef]
- Volpe, G.; Wehr, J. Effective drifts in dynamical systems with multiplicative noise: A review of recent progress. Rep. Prog. Phys. 2016, 79, 053901. [Google Scholar] [CrossRef]
- Shaebani, M.R.; Wysocki, A.; Winkler, R.G.; Gompper, G.; Rieger, H. Computational models for active matter. Nat. Rev. Phys. 2020, 2, 181–199. [Google Scholar] [CrossRef]
- te Vrugt, M. Artificial Intelligence and Intelligent Matter; Springer: Cham, Switzerland, 2025. [Google Scholar]
- Maslyaev, M.; Hvatov, A. Solver-based fitness function for the data-driven evolutionary discovery of partial differential equations. In Proceedings of the 2022 IEEE Congress on Evolutionary Computation (CEC), Padua, Italy, 18-23 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Chen, Y.; Luo, Y.; Liu, Q.; Xu, H.; Zhang, D. Symbolic genetic algorithm for discovering open-form partial differential equations (SGA-PDE). Phys. Rev. Res. 2022, 4, 023174. [Google Scholar] [CrossRef]
- Du, M.; Chen, Y.; Zhang, D. DISCOVER: Deep identification of symbolically concise open-form partial differential equations via enhanced reinforcement learning. Phys. Rev. Res. 2024, 6, 013182. [Google Scholar] [CrossRef]
- Messenger, D.A.; Bortz, D.M. Weak SINDy for partial differential equations. J. Comput. Phys. 2021, 443, 110525. [Google Scholar] [CrossRef] [PubMed]
- Rudy, S.H.; Brunton, S.L.; Proctor, J.L.; Kutz, J.N. Data-driven discovery of partial differential equations. Sci. Adv. 2017, 3, e1602614. [Google Scholar] [CrossRef]
- Stephany, R.; Earls, C. PDE-READ: Human-readable partial differential equation discovery using deep learning. Neural Netw. 2022, 154, 360–382. [Google Scholar] [CrossRef]
- Xu, H.; Chang, H.; Zhang, D. DLGA-PDE: Discovery of PDEs with incomplete candidate library via combination of deep learning and genetic algorithm. J. Comput. Phys. 2020, 418, 109584. [Google Scholar] [CrossRef]
- Hvatov, A.; Aminev, D.; Demyanchuk, N. Easy to learn hard to master—How to solve an arbitrary equation with PINN. In Proceedings of the NeurIPS 2023 AI for Science Workshop, New Orleans, LA, USA, 10–16 December 2023. [Google Scholar]
- Fasel, U.; Kutz, J.N.; Brunton, B.W.; Brunton, S.L. Ensemble-SINDy: Robust sparse model discovery in the low-data, high-noise limit, with active learning and control. Proc. R. Soc. A 2022, 478, 20210904. [Google Scholar] [CrossRef]
- Roy, B.; Yoshinaga, N. Estimation of spatial and time scales of collective behaviors of active matters through learning hydrodynamic equations from particle dynamics. arXiv 2024, arXiv:2411.03783. [Google Scholar] [CrossRef]
- Ihle, T. Chapman–Enskog expansion for the Vicsek model of self-propelled particles. J. Stat. Mech. 2016, 2016, 083205. [Google Scholar] [CrossRef]
- Mahault, B.; Patelli, A.; Chaté, H. Deriving hydrodynamic equations from dry active matter models in three dimensions. J. Stat. Mech. 2018, 2018, 093202. [Google Scholar] [CrossRef]
- Bebon, R.; Robinson, J.F.; Speck, T. Thermodynamics of Active Matter: Tracking Dissipation across Scales. Phys. Rev. X 2025, 15, 021050. [Google Scholar] [CrossRef]
- Yoshinaga, N. Simple Models of Self-Propelled Colloids and Liquid Drops: From Individual Motion to Collective Behaviors. J. Phys. Soc. Jpn. 2017, 86, 101009. [Google Scholar] [CrossRef]
- Dmitriev, A.A.; Porvatov, V.A.; Rozenblit, A.D.; Buzakov, M.K.; Molodtsova, A.A.; Sennikova, D.V.; Smirnov, V.A.; Burmistrov, O.I.; Karimov, T.I.; Puhtina, E.M.; et al. Swarmodroid and AMPy: Reconfigurable Bristle-Bots & Software Package for Robotic Active Matter Studies. IEEE Access 2025, 13, 212719–212734. [Google Scholar] [CrossRef]
- Giomi, L.; Hawley-Weld, N.; Mahadevan, L. Swarming, swirling and stasis in sequestered bristle-bots. Proc. R. Soc. A Math. Phys. Eng. Sci. 2013, 469, 20120637. [Google Scholar] [CrossRef]
- Boudet, J.F.; Jagielka, J.; Guerin, T.; Barois, T.; Pistolesi, F.; Kellay, H. Effective temperature and dissipation of a gas of active particles probed by the vibrations of a flexible membrane. Phys. Rev. Res. 2022, 4, L042006. [Google Scholar] [CrossRef]
- Chen, L.; Welch, K.J.; Leishangthem, P.; Ghosh, D.; Zhang, B.; Sun, T.P.; Klukas, J.; Tu, Z.; Cheng, X.; Xu, X. Molecular chaos in dense active systems. arXiv 2023, arXiv:2302.10525. [Google Scholar] [CrossRef]
- Barona Balda, A.; Argun, A.; Callegari, A.; Volpe, G. Playing with active matter. Am. J. Phys. 2024, 92, 847–858. [Google Scholar] [CrossRef]
- Pan, M.; Yang, Y.; Qin, X.; Li, G.; Xi, N.; Long, M.; Jiang, L.; Zhao, T.; Liu, L. Applying the intrinsic principle of cell collectives to program robot swarms. Cell Rep. Phys. Sci. 2024, 5, 102122. [Google Scholar] [CrossRef]
- Yang, X.; Ren, C.; Cheng, K.; Zhang, H. Robust boundary flow in chiral active fluid. Phys. Rev. E 2020, 101, 022603. [Google Scholar] [CrossRef]
- Porvatov, V.; Rozenblit, A.; Dmitriev, A.; Burmistrov, O.; Petrova, D.; Gritsenko, G.; Puhtina, E.; Kretov, E.; Filonov, D.; Souslov, A.; et al. Optimizing self-rotating bristle-bots for active matter implementation with robotic swarms. J. Phys. Conf. Ser. 2021, 2086, 012202. [Google Scholar] [CrossRef]
- Wang, J.; Wang, G.; Chen, H.; Liu, Y.; Wang, P.; Yuan, D.; Ma, X.; Xu, X.; Cheng, Z.; Ji, B.; et al. Robo-matter towards reconfigurable multifunctional smart materials. Nat. Commun. 2024, 15, 8853. [Google Scholar] [CrossRef] [PubMed]
- Ben Zion, M.Y.; Fersula, J.; Bredeche, N.; Dauchot, O. Morphological computation and decentralized learning in a swarm of sterically interacting robots. Sci. Robot. 2023, 8, eabo6140. [Google Scholar] [CrossRef]
- Molodtsova, A.A.; Buzakov, M.K.; Burmistrov, O.I.; Rozenblit, A.D.; Smirnov, V.A.; Sennikova, D.V.; Porvatov, V.A.; Puhtina, E.M.; Dmitriev, A.A.; Olekhno, N.A. Micellization in active matter of asymmetric self-propelled particles: Experiments. Phys. Rev. E 2025, 111, 065424. [Google Scholar] [CrossRef]
- Li, S.; Dutta, B.; Cannon, S.; Daymude, J.; Avinery, R.; Aydin, E.; Richa, A.; Goldman, D.; Randall, D. Programming active cohesive granular matter with mechanically induced phase changes. Sci. Adv. 2021, 7, eabe8494. [Google Scholar] [CrossRef]
- Wang, G.; Phan, T.V.; Li, S.; Wombacher, M.; Qu, J.; Peng, Y.; Chen, G.; Goldman, D.I.; Levin, S.A.; Austin, R.H.; et al. Emergent Field-Driven Robot Swarm States. Phys. Rev. Lett. 2021, 126, 108002. [Google Scholar] [CrossRef]
- Saintyves, B.; Spenko, M.; Jaeger, H.M. A self-organizing robotic aggregate using solid and liquid-like collective states. Sci. Robot. 2024, 9, eadh4130. [Google Scholar] [CrossRef]
- Marchetti, M.C.; Joanny, J.F.; Ramaswamy, S.; Liverpool, T.B.; Prost, J.; Rao, M.; Simha, R.A. Hydrodynamics of soft active matter. Rev. Mod. Phys. 2013, 85, 1143–1189. [Google Scholar] [CrossRef]
- Scheibner, C.; Souslov, A.; Banerjee, D.; Surówka, P.; Irvine, W.T.M.; Vitelli, V. Odd elasticity. Nat. Phys. 2020, 16, 475–480. [Google Scholar] [CrossRef]
- Fruchart, M.; Scheibner, C.; Vitelli, V. Odd Viscosity and Odd Elasticity. Annu. Rev. Condens. Matter Phys. 2023, 14, 471–510. [Google Scholar] [CrossRef]
- Anderson, J.A.; Glaser, J.; Glotzer, S.C. HOOMD-blue: A Python package for high-performance molecular dynamics and hard particle Monte Carlo simulations. Comput. Mater. Sci. 2020, 173, 109363. [Google Scholar] [CrossRef]
- Klamser, J.U.; Dauchot, O.; Tailleur, J. Kinetic Monte Carlo Algorithms for Active Matter Systems. Phys. Rev. Lett. 2021, 127, 150602. [Google Scholar] [CrossRef]
- Briand, G.; Dauchot, O. Crystallization of Self-Propelled Hard Discs. Phys. Rev. Lett. 2016, 117, 098004. [Google Scholar] [CrossRef]
- Fruchart, M.; Hanai, R.; Littlewood, P.B.; Vitelli, V. Non-reciprocal phase transitions. Nature 2021, 592, 363–369. [Google Scholar] [CrossRef] [PubMed]
- Cates, M.E.; Tailleur, J. Motility-Induced Phase Separation. Annu. Rev. Condens. Matter Phys. 2015, 6, 219–244. [Google Scholar] [CrossRef]
- Shankar, S.; Souslov, A.; Bowick, M.J.; Marchetti, M.C.; Vitelli, V. Topological active matter. Nat. Rev. Phys. 2022, 4, 380–398. [Google Scholar] [CrossRef]
- Casiulis, M.; Arbel, E.; van Waes, C.; Lahini, Y.; Martiniani, S.; Oppenheimer, N.; Zion, M.Y.B. A geometric condition for robot-swarm cohesion and cluster–flock transition. Proc. Natl. Acad. Sci. USA 2025, 122, e2502211122. [Google Scholar] [CrossRef]
- Rabinovich, M.I.; Ezersky, A.B.; Weidman, P.D. The Dynamics of Patterns; World Scientific: Singapore, 2000. [Google Scholar] [CrossRef]
- Martin, D.; Seara, D.; Avni, Y.; Fruchart, M.; Vitelli, V. Transition to Collective Motion in Nonreciprocal Active Matter: Coarse Graining Agent-Based Models into Fluctuating Hydrodynamics. Phys. Rev. X 2025, 15, 041015. [Google Scholar] [CrossRef]
- Prince, J.F. Lagrangian and Eulerian Representations of Fluid Flow; Clark Laboratory Woods Hole Oceanographic Institution: Woods Hole, MA, USA, 2006. [Google Scholar]
- Schmidt, M.; Lipson, H. Distilling Free-Form Natural Laws from Experimental Data. Science 2009, 324, 81–85. [Google Scholar] [CrossRef]
- Messenger, D.A. Weak-form Sparse Identification of Differential Equations from Noisy Measurements. Ph.D. Thesis, University of Colorado Boulder, Boulder, CO, USA, 2022. [Google Scholar]
- Loiseau, J.C.; Brunton, S.L. Constrained sparse Galerkin regression. J. Fluid Mech. 2018, 838, 42–67. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Vicsek, T.; Czirók, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. 1995, 75, 1226. [Google Scholar] [CrossRef] [PubMed]
- Barnett, L.; Seth, A.K. Dynamical independence: Discovering emergent macroscopic processes in complex dynamical systems. Phys. Rev. E 2023, 108, 014304. [Google Scholar] [CrossRef]
- Supekar, R.; Song, B.; Hastewell, A.; Choi, G.P.; Mietke, A.; Dunkel, J. Learning hydrodynamic equations for active matter from particle simulations and experiments. Proc. Natl. Acad. Sci. USA 2023, 120, e2206994120. [Google Scholar] [CrossRef]
- Champion, K.; Lusch, B.; Kutz, J.N.; Brunton, S.L. Data-driven discovery of coordinates and governing equations. Proc. Natl. Acad. Sci. USA 2019, 116, 22445–22451. [Google Scholar] [CrossRef] [PubMed]
- Maslyaev, M.; Hvatov, A.; Kalyuzhnaya, A.V. Partial differential equations discovery with EPDE framework: Application for real and synthetic data. J. Comput. Sci. 2021, 53, 101345. [Google Scholar] [CrossRef]
- Van Kampen, N.G. Stochastic Processes in Physics and Chemistry; Elsevier: Amsterdam, The Netherlands, 1992; Volume 1. [Google Scholar]
- Lotka, A.J. Analytical note on certain rhythmic relations in organic systems. Proc. Natl. Acad. Sci. USA 1920, 6, 410–415. [Google Scholar] [CrossRef] [PubMed]
- Howard, P. Modeling basics. Lect. Notes Math. 2009, 442, 1–98. [Google Scholar]
- Alder, B.J.; Wainwright, T.E. Studies in Molecular Dynamics. I. General Method. J. Chem. Phys. 1959, 31, 459–466. [Google Scholar] [CrossRef]
- Verlet, L. Computer “Experiments” on Classical Fluids. I. Thermodynamical Properties of Lennard-Jones Molecules. Phys. Rev. 1967, 159, 98–103. [Google Scholar] [CrossRef]
- Jones, J.E. On the determination of molecular fields.—II. From the equation of state of a gas. Proc. R. Soc. Lond. Ser. A Contain. Pap. A Math. Phys. Character 1924, 106, 463–477. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, herds and schools: A distributed behavioral model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 27–31 July 1987; pp. 25–34. [Google Scholar]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- Brunton, S.L.; Proctor, J.L.; Kutz, J.N. Discovering governing equations from data by sparse identification of nonlinear dynamical systems. Proc. Natl. Acad. Sci. USA 2016, 113, 3932–3937. [Google Scholar] [CrossRef]
- Haken, H. Synergetics: An overview. Rep. Prog. Phys. 1989, 52, 515. [Google Scholar] [CrossRef]
- Landau, L. The theory of phase transitions. Nature 1936, 138, 840–841. [Google Scholar] [CrossRef]
- Toner, J.; Tu, Y. Long-range order in a two-dimensional dynamical XY model: How birds fly together. Phys. Rev. Lett. 1995, 75, 4326. [Google Scholar] [CrossRef] [PubMed]
- Bertin, E.; Droz, M.; Grégoire, G. Boltzmann and hydrodynamic description for self-propelled particles. Phys. Rev. E—Stat. Nonlinear Soft Matter Phys. 2006, 74, 022101. [Google Scholar] [CrossRef] [PubMed]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.