
Control Optimization of Small-Scale Thrust-Vectoring Vertical/Short Take-Off and Landing Vehicles in Transition Phase



Abstract
1. Introduction
2. Transition Corridor of the 3BSD Nozzle
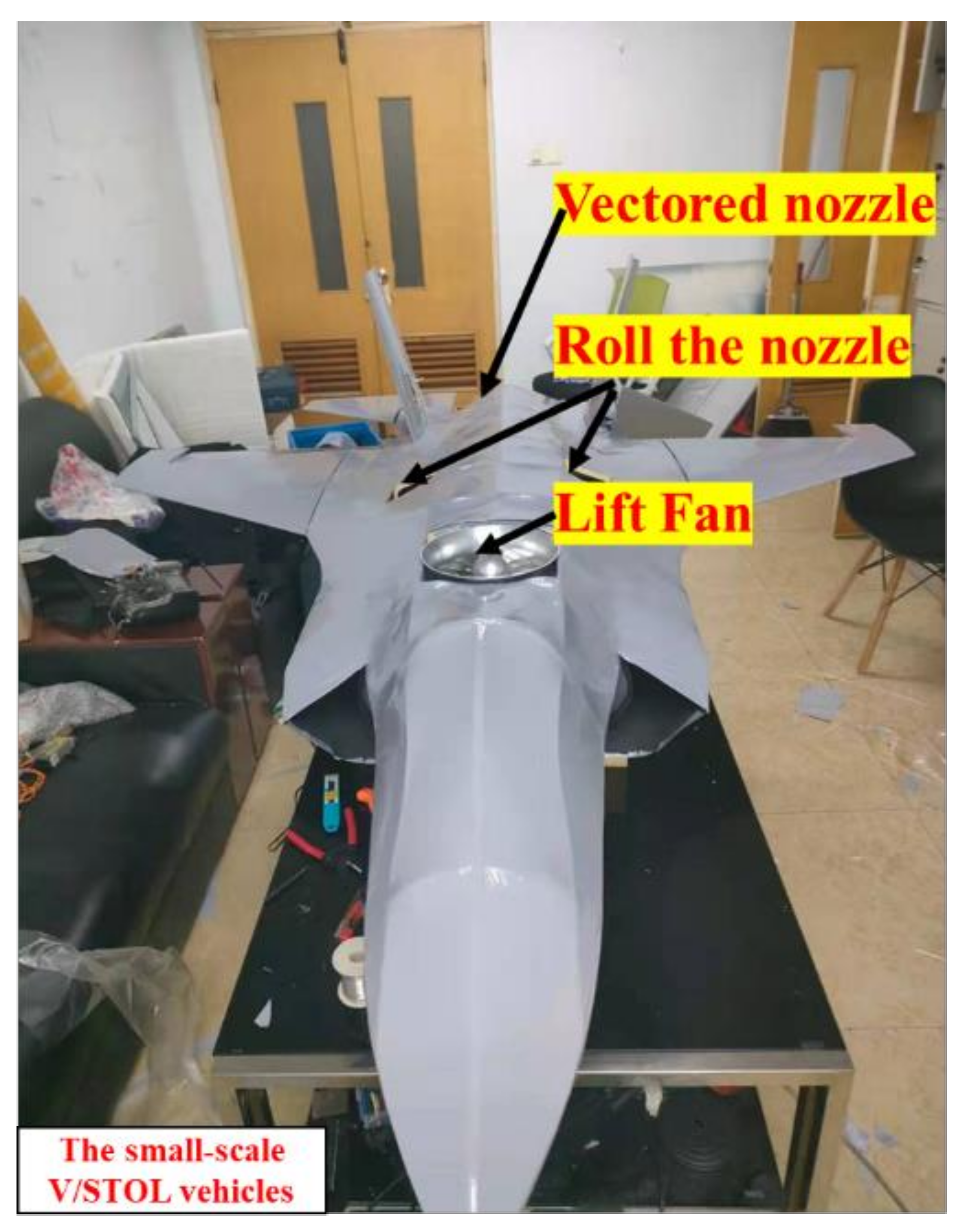
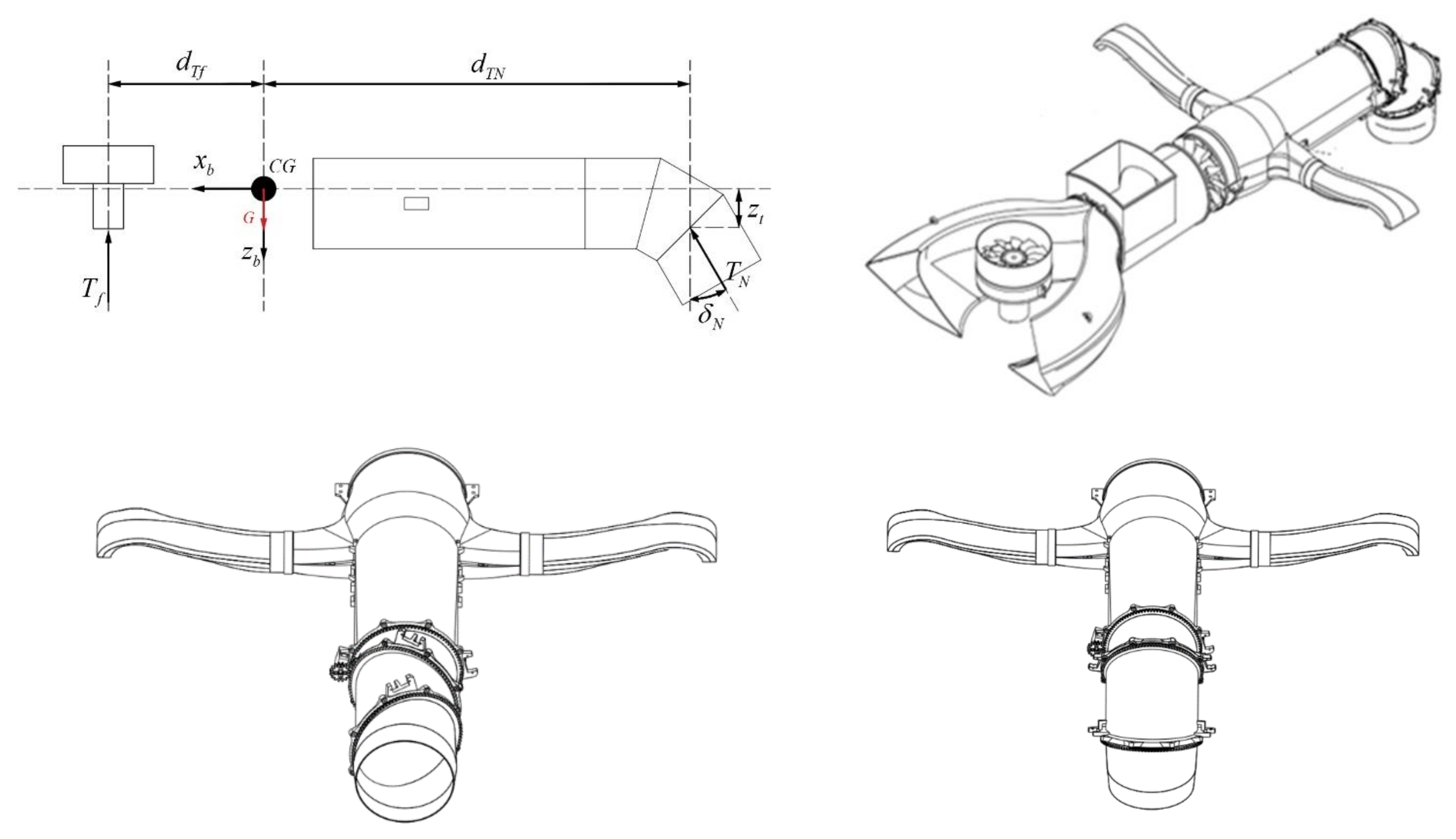
2.1. The Propulsion System Model
2.2. The Jet Stream Effect
2.3. Longitudinal Dynamic Model
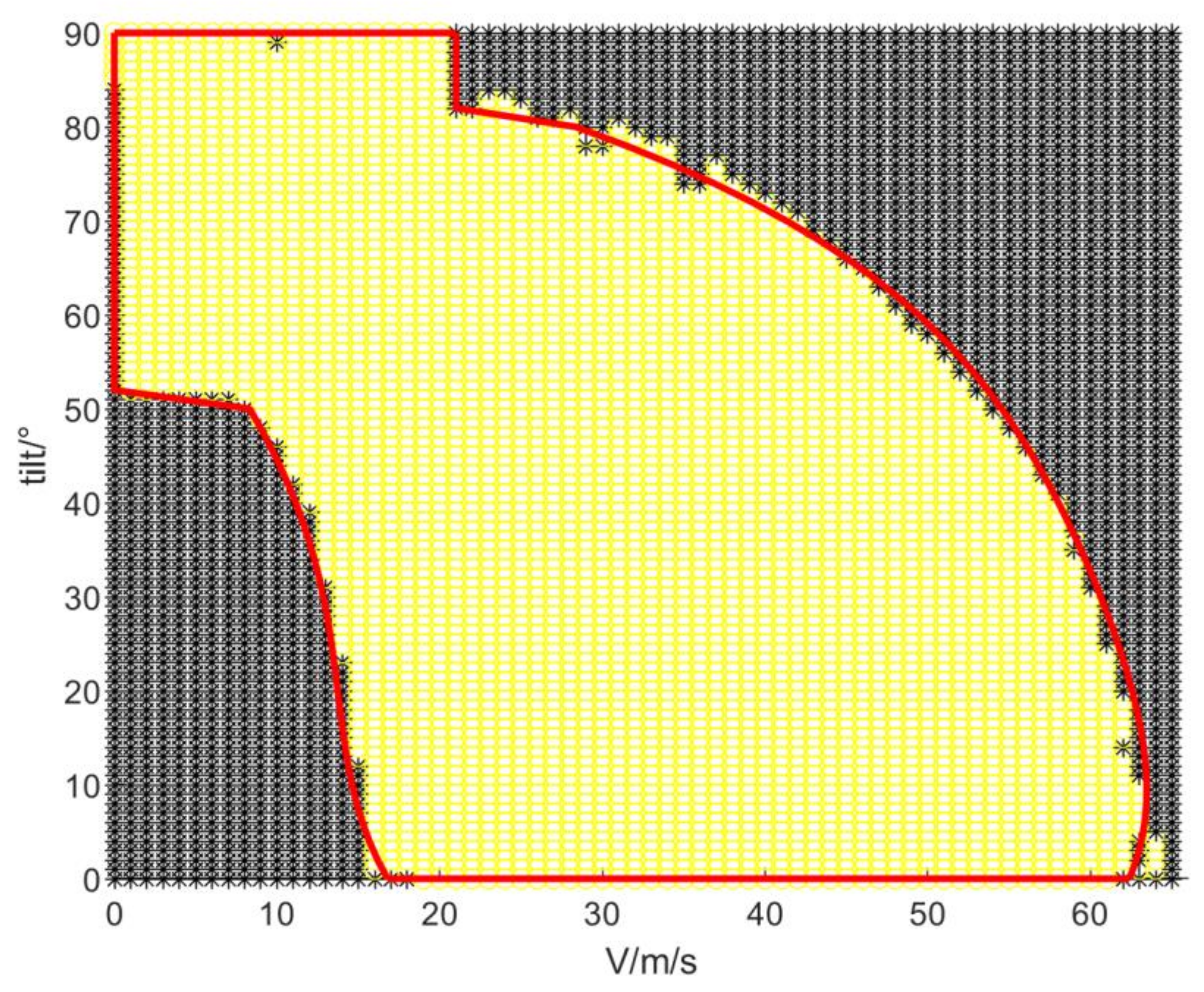
2.4. Transition Corridor
- Step 1: Initialize the model parameters, calculation conditions and constraint states.
- Step 2: Trim the model and save the results.
- Step 3: Change the trimming velocity and tilt angle of the 3BSD nozzle and repeat Step 2.
- Step 4: Plot the trimming results.
- Step 5: Remove the trimming points that have excessive flight path angles.
3. Control Strategy
3.1. Control Principles
3.2. Control Allocation
3.3. Control Strategy Optimization
- Input variables
- 2.
- Boundary conditions
- 3.
- Trajectory constraints
- 4.
- Cost function
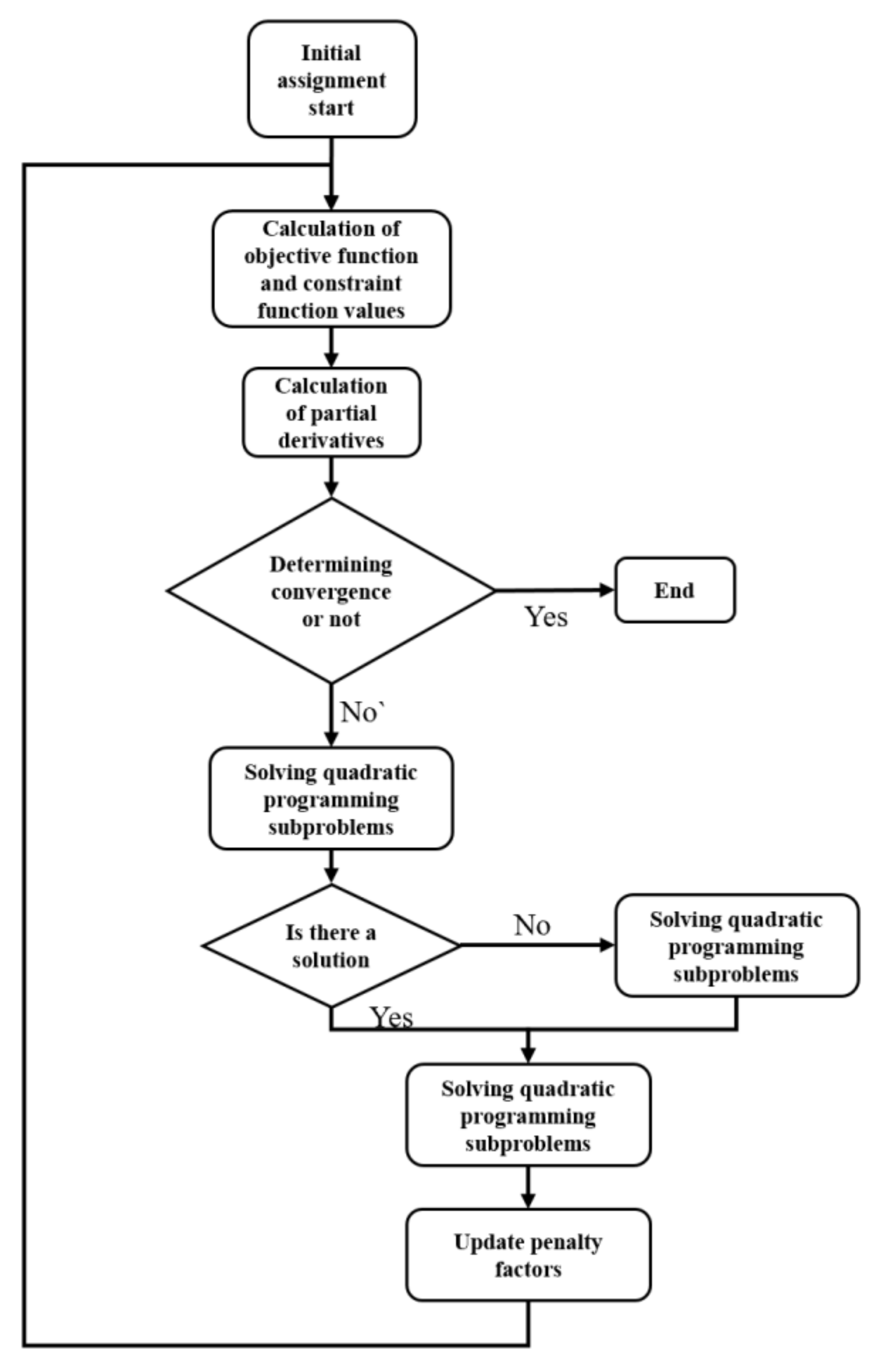
3.4. Numerical Optimization Method
3.4.1. Nondimensionalization Method
3.4.2. Transformation Method
4. Optimization Results
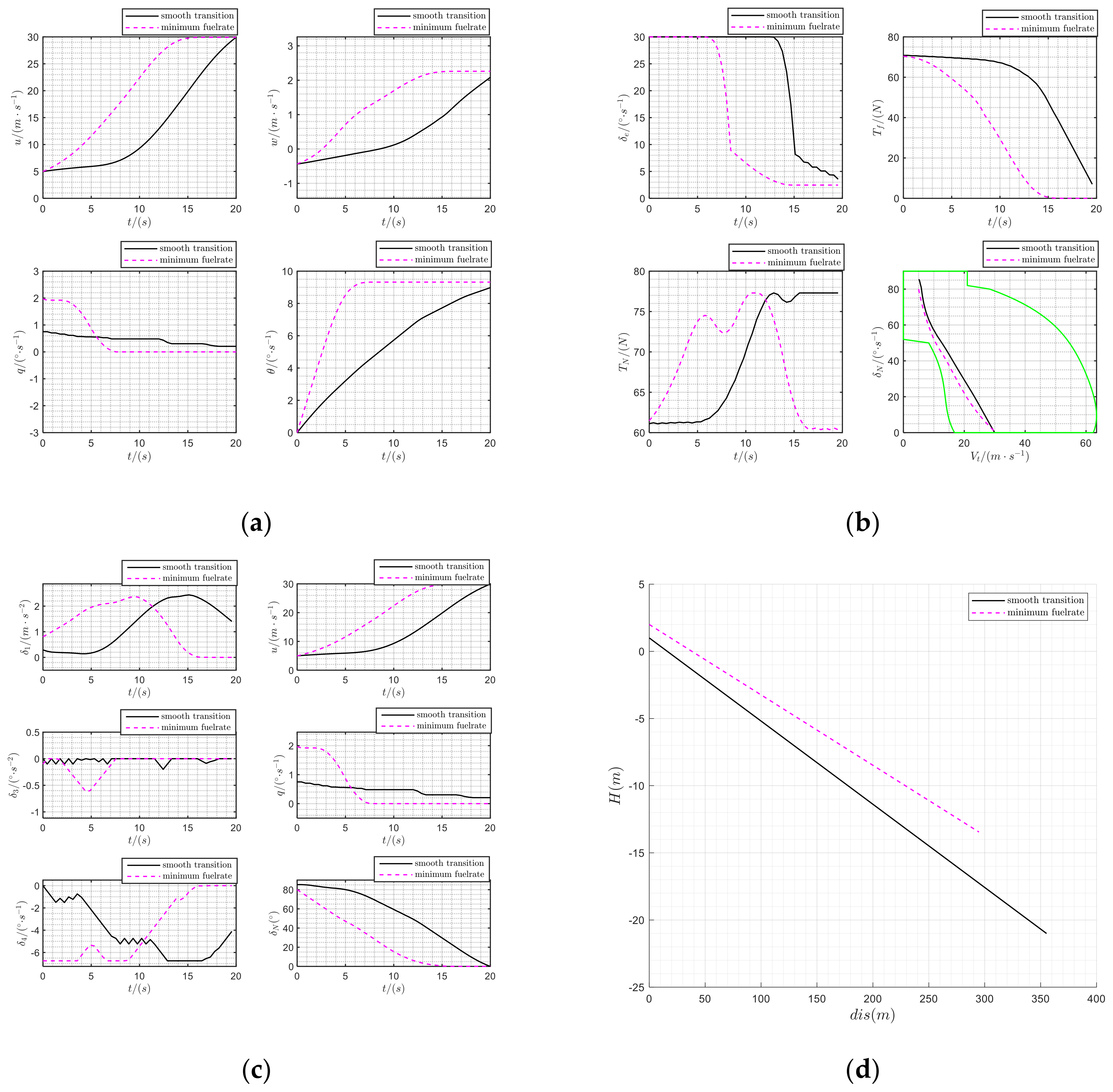
4.1. Transition in Take-Off
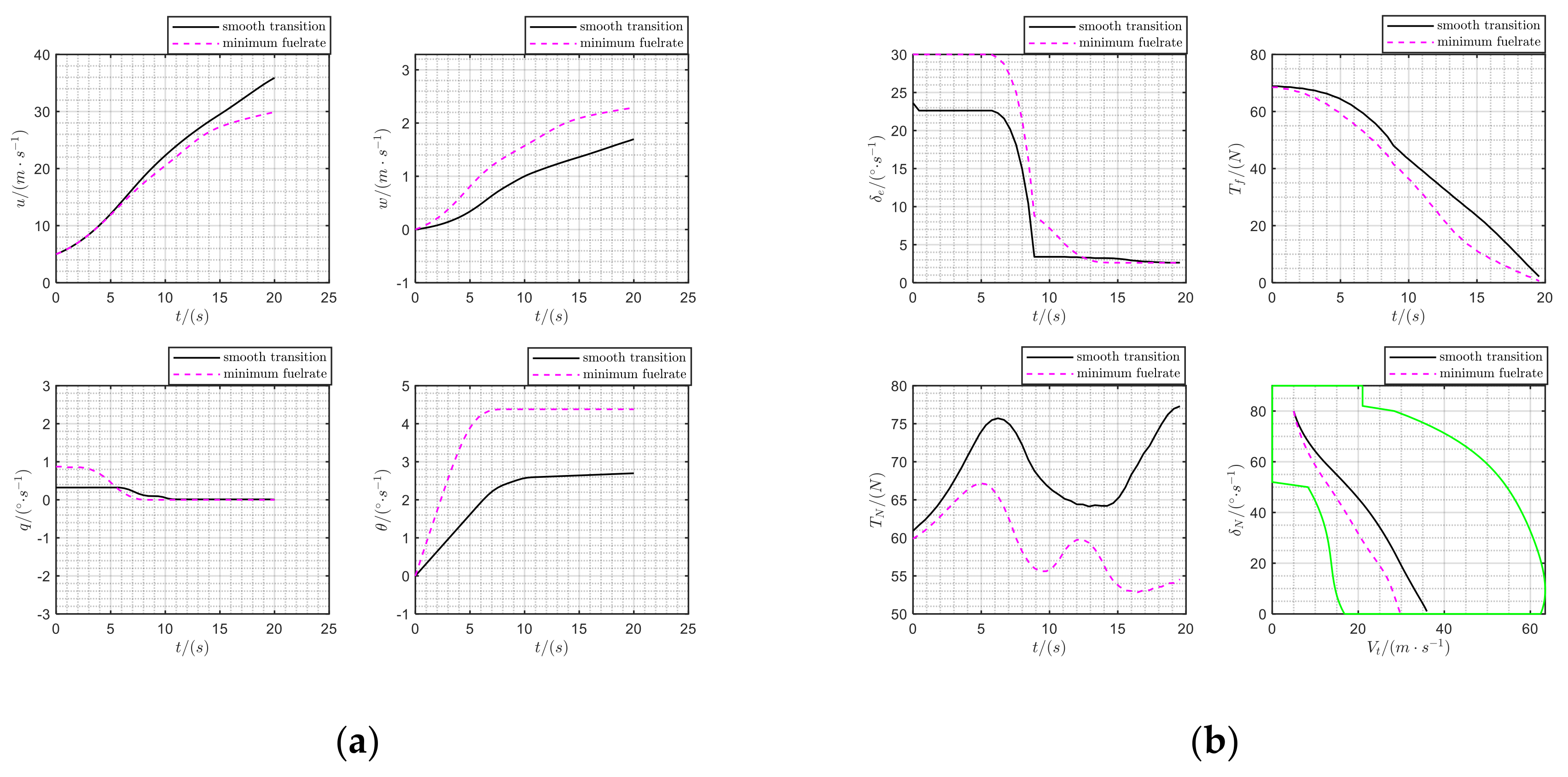
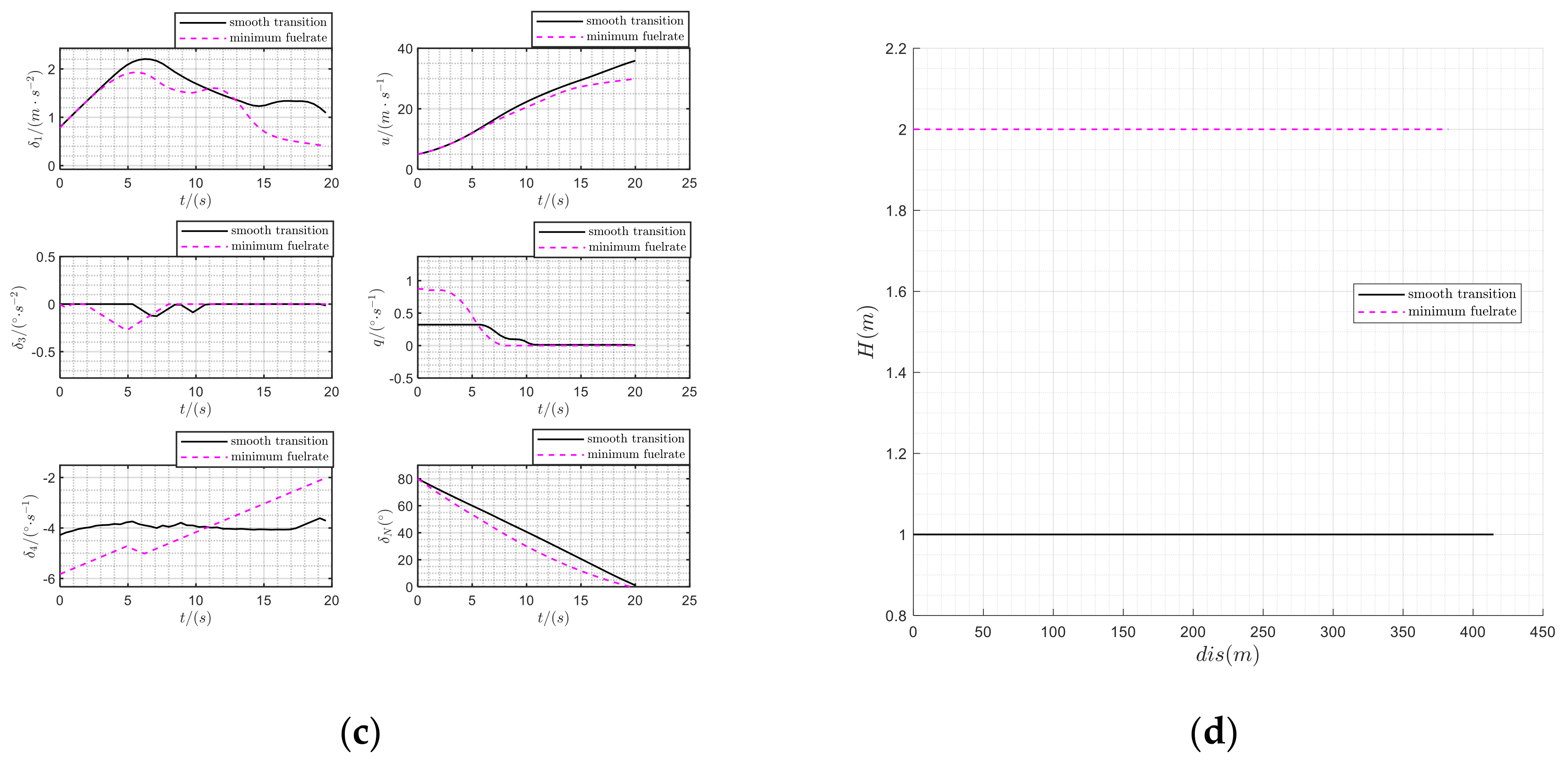
4.2. Transition in Landing
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jet-Induced Effects. The Aerodynamics of Jet-and Fan-Powered V/STOL Aircraft in Hover and Transition. Available online: http://library.oum.edu.my/oumlib/node/720068 (accessed on 11 April 2022).
- Franklin, J.A. Revised Simulation Model of the Control System, Displays, and Propulsion System for an ASTOVL Lift Fan Aircraft; NASA-TM-112208; NASA: Washington, DC, USA, 1997; pp. 1–70.
- Bordignon, K.; Bessolo, J. Control allocation for the X-35B. In Proceedings of the 2002 Biennial International Powered Lift Conference and Exhibit, Williamsburg, VA, USA, 5–7 November 2002. [Google Scholar]
- Hwang, S.J.; Kim, Y.S.; Lee, M.K. Tilt rotor-wing concept for multi-purpose VTOL UAV. Int. J. Aeronaut. Space Sci. 2007, 8, 87–94. [Google Scholar] [CrossRef]
- Choi, S.; Kang, Y.; Chang, S.; Koo, S.; Kim, J.M. Development and conversion flight test of a small tiltrotor unmanned aerial vehicle. J. Aircr. 2010, 47, 730–735. [Google Scholar] [CrossRef]
- Fan, Y.; Wang, X.; Hu, Z.; Zhang, K. Nonlinear modeling and transition corridor calculation of a tiltrotor without cyclic pitch. In MATEC Web of Conferences, Proceedings of the ICPCM2021, Xiamen, China, 29–30 December 2021; EDP Sciences: Les Ulis, France, 2022. [Google Scholar]
- Tol, H.J.; de Visser, C.C.; van Kampen, E.-J.; Chu, Q.P. Nonlinear Multivariate Spline-Based Control Allocation for High-Performance Aircraft. J. Guid. Control Dyn. 2014, 37, 1840–1862. [Google Scholar] [CrossRef][Green Version]
- Tian, Y.; He, Y.; Li, X.; Zhu, J. Simulation testing method of V/STOL flight control strategy. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012. [Google Scholar]
- Denham, J.; Paines, J. Converging on a Precision Hover Control Strategy for the F-35B STOVL Aircraft. In AIAA Guidance, Proceedings of the Navigation & Control Conference & Exhibit, Honolulu, HI, USA, 18–21 August 2008; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2008. [Google Scholar]
- Betts, J.T. Survey of Numerical Methods for Trajectory Optimization. J. Guid. Control. Dyn. 1998, 21, 193–207. [Google Scholar] [CrossRef]
- Jorris, T.R.; Cobb, R.G. Three-Dimensional Trajectory Optimization Satisfying Waypoint and No-Fly Zone Constraints. J. Guid. Control Dyn. 2008, 31, 543–553. [Google Scholar] [CrossRef]
- Lee, S.; Bang, H. Three-Dimensional Ascent Trajectory Optimization for Stratospheric Airship Platforms in the Jet Stream. J. Guid. Control Dyn. 2007, 30, 1341–1351. [Google Scholar] [CrossRef]
- Dragan, A.D.; Ratliff, N.D.; Srinivasa, S.S. Manipulation planning with goal sets using constrained trajectory optimization. In Proceedings of the IEEE International Conference on Robotics & Automation, Shanghai China, 15 August 2011. [Google Scholar]
- Hughes, S.P.; Mailhe, L.M.; Guzman, J.J. A Comparison of Trajectory Optimization Methods for the Impulsive Minimum Fuel Rendezvous Problem. In Proceedings of the 26th Annual Guidance and Control Conference, Breckenridge, CO, USA, 5–9 February 2003. [Google Scholar]
- Miele, A.; Wang, T.; Basapur, V. Primal and dual formulations of sequential gradient-restoration algorithms for trajectory optimization problems. Acta Astronaut. 1986, 13, 491–505. [Google Scholar] [CrossRef]
- Rysdyk, R.T.; Calise, A.J. Adaptive model inversion flight control for tilt—Rotor aircraft. J. Guid. Control Dyn. 1999, 22, 402–407. [Google Scholar] [CrossRef]
- Brick, S.; Fischer, D. CV-22 osprey flight path cueing flight director system. In Proceedings of the AHS Annual Forum Proceedings, Washington, DC, USA, 20–22 May 1998; AHS International: Fairfax, VA, USA, 1998. [Google Scholar]
- Klein, P.D.; Nicks, C.O. Flight director and approach profile development for civil tihrotor terminal area operations. In Proceedings of the AHS 54th International Annual Forum, Washington, DC, USA, 20–22 May 1998; AHS International: Fairfax, VA, USA, 1998. [Google Scholar]
- Calise, A.J.; Rysdyk, R. Research in Nonlinear Flight Control for Tihrotor Aircraft Operating in the Terminal Area; NASA CR-203112; NASA: Washington, DC, USA, 1996.
- Marr, R.L.; Roderick, W.E.B. Handling qualities evaluation of the XV-1 5 tilt rotor aircraft. J. Am. Helicopter Soc. 1975, 20, 23–33. [Google Scholar] [CrossRef]
- Pu, H.Z.; Zhen, Z.Y.; Gao, C. Tiltrotor aircraft attitude control in conversion mode based on optimal preview control Guidance. In Proceedings of the Navigation and Control Conference, Yantai, China, 8–10 August 2014. [Google Scholar]
- Bottasso, C.L.; Croce, A.; Leonello, D.; Riviello, L. Optimization of critical trajectories for rotorcraft vehicles. J. Am. Helicopter Soc. 2005, 50, 165–177. [Google Scholar] [CrossRef]
- Jhemi, A.A.; Carlson, E.B.; Zhao, Y.J.; Chen, R.T. Optimization of rotorcraft flight following engine failure. J. Am. Helicopter Soc. 2004, 49, 117–126. [Google Scholar]
- Carlson, E.B.; Zhao, Y.J. Optimal city-center takeoff operation of tiltrotor aircraft in one engine failure. J. Aerosp. Eng. 2004, 17, 26–39. [Google Scholar]
- Birckelbaw, L.G.; Mcneil, W.E.; Wardwell, D.A. Aerodynamics model for a generic ASTOVL lift-fan aircraft. NASA Tech. Rep. 1995, 124, 109–125. [Google Scholar]
- Smith, B.E.; Pppen, W.A.; Lye, J.D. Propulsion-induced aerodynamic effects measured with a full-scale stovl model. J. Aircr. 2015, 31, 306–313. [Google Scholar] [CrossRef]
- Thondiyath, A. Design, analysis, and testing of a hybrid vtol tilt-rotor uav for increased endurance. Sensors 2021, 21, 5987. [Google Scholar]
- Saddington, A.J.; Knowles, K. A review of out-of-ground-effect propulsion-induced interference on stovl aircraft. Prog. Aerosp. Sci. 2005, 41, 175–191. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| 0.476 m | |
| 0.561 m | |
| 0.1 m |
| Parameters | Values |
|---|---|
| 13 kg | |
| 0.88 m2 | |
| 1.53 m | |
| 1.055 kg/m3 |
| Actuators | Max Value |
|---|---|
| [−35°, 35°] | |
| [0, 80 N] | |
| [0, 80 N] | |
| [0, 90°] |
| Stick | Longitude | The z-axis velocity | Pitch acceleration () | elevator |
| Lateral | The y-axis velocity | Roll speed | aileron | |
| The throttle lever | The x-axis velocity | The x-axis acceleration () | 3BSD nozzle thrust | |
| Pedal | The z-axis angular rates | Rudder | Rudder | |
| Roller | 3BSD nozzle tilt angular rates () | |||
| Parameters | Values |
|---|---|
| 25 | |
| [−0.5, −0.1, −0.5, −0.5] | |
| [−0.1, −0.1, −0.1, −0.8] | |
| [−0.1, −0.1, −0.1, −0.1] | |
| 46 | |
| [0.5, 0.1, 0.5,0.5] | |
| [0.1, 0.1, 0.1, 0.8] | |
| [0.1, 0.1, 0.1, 0.1] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, Z.; Mao, S.; Wang, Z.; Zhou, Z.; Yang, C.; Li, Z. Control Optimization of Small-Scale Thrust-Vectoring Vertical/Short Take-Off and Landing Vehicles in Transition Phase. Drones 2022, 6, 129. https://doi.org/10.3390/drones6050129
Gong Z, Mao S, Wang Z, Zhou Z, Yang C, Li Z. Control Optimization of Small-Scale Thrust-Vectoring Vertical/Short Take-Off and Landing Vehicles in Transition Phase. Drones. 2022; 6(5):129. https://doi.org/10.3390/drones6050129
Chicago/Turabian StyleGong, Zheng, Shengcheng Mao, Zian Wang, Zan Zhou, Chengchuan Yang, and Zhengxue Li. 2022. "Control Optimization of Small-Scale Thrust-Vectoring Vertical/Short Take-Off and Landing Vehicles in Transition Phase" Drones 6, no. 5: 129. https://doi.org/10.3390/drones6050129
APA StyleGong, Z., Mao, S., Wang, Z., Zhou, Z., Yang, C., & Li, Z. (2022). Control Optimization of Small-Scale Thrust-Vectoring Vertical/Short Take-Off and Landing Vehicles in Transition Phase. Drones, 6(5), 129. https://doi.org/10.3390/drones6050129