

Inventions, Volume 10, Issue 5 (October 2025) – 20 articles
Cover Story (view full-size image):
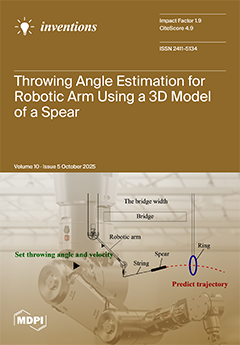
In this study, we developed a robotic arm capable of throwing a spear tethered with a string toward a target. This device was intended to facilitate wire installation beneath bridges, which has been a significant challenge in conventional bridge inspections. To enable the rapid placement of wires in the limited space under the bridge, it was necessary to throw the spear accurately. To this end, we constructed a three-dimensional model of the spear’s flight that accounts for string tension and air resistance. Based on this model, we estimated the required throwing conditions and experimentally confirmed that the robotic arm could throw the spear to the target. View this paper
- Issues are regarded as officially published after their release is announced to the table of contents alert mailing list.
- You may sign up for e-mail alerts to receive table of contents of newly released issues.
- PDF is the official format for papers published in both, html and pdf forms. To view the papers in pdf format, click on the "PDF Full-text" link, and use the free Adobe Reader to open them.
Previous Issue
Next Issue