

Fluid–Structure Interaction Analysis of a Bionic Robotic Fish Based on a Macrofiber Composite Material


Abstract
1. Introduction
2. Introduction to Piezoelectric Intelligent Composite Materials
3. FSI Simulation of a Bionic Robotic Fish Based on MFC
3.1. Overview of the FSI Finite Element Analysis Method
3.2. Dynamics Theory of a Bionic Robotic Fish
- (1)
- Structural Dynamics Model of a Bionic Robotic Fish
- (2)
- Structural Dynamics Equations for the Bionic Robotic Fish
3.3. Theory of Fluid Dynamics
- (1)
- Fluid Model
- (2)
- Fluid Equations and Algorithm
- (3)
- Turbulence Model
- (4)
- Dynamic Mesh Model
3.4. Transient Analysis of the Bionic Robotic Fish
4. Numerical Analysis of the Bionic Robotic Fish
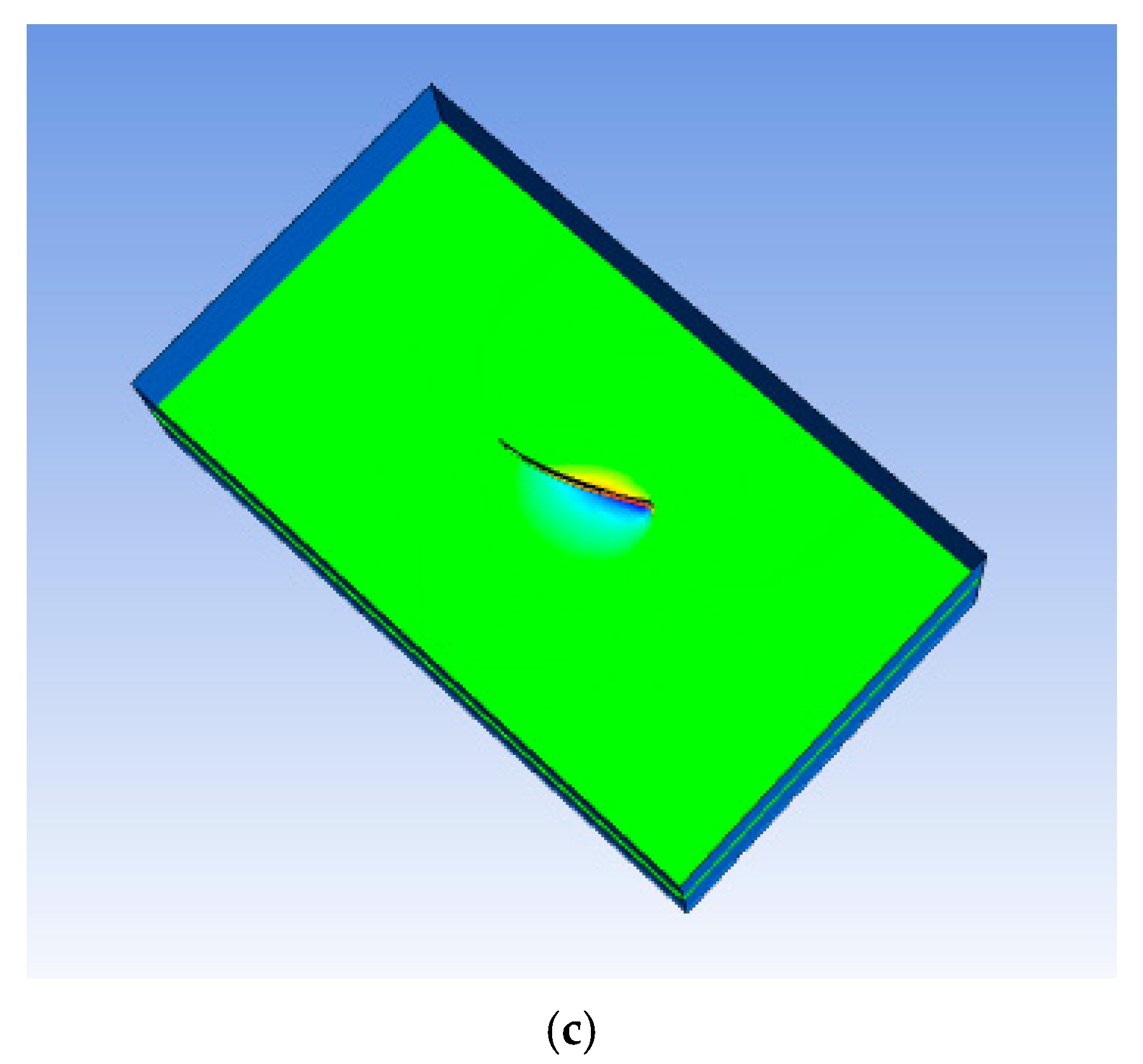
4.1. Analysis of the Simulation Results of the Robot Swimming Pressure
4.2. Analysis of the Simulation Results of the Robot Fish Thrust and Displacement
5. Bionic Robotic Fish Experiment
5.1. Propulsion of a Molluskular Robot
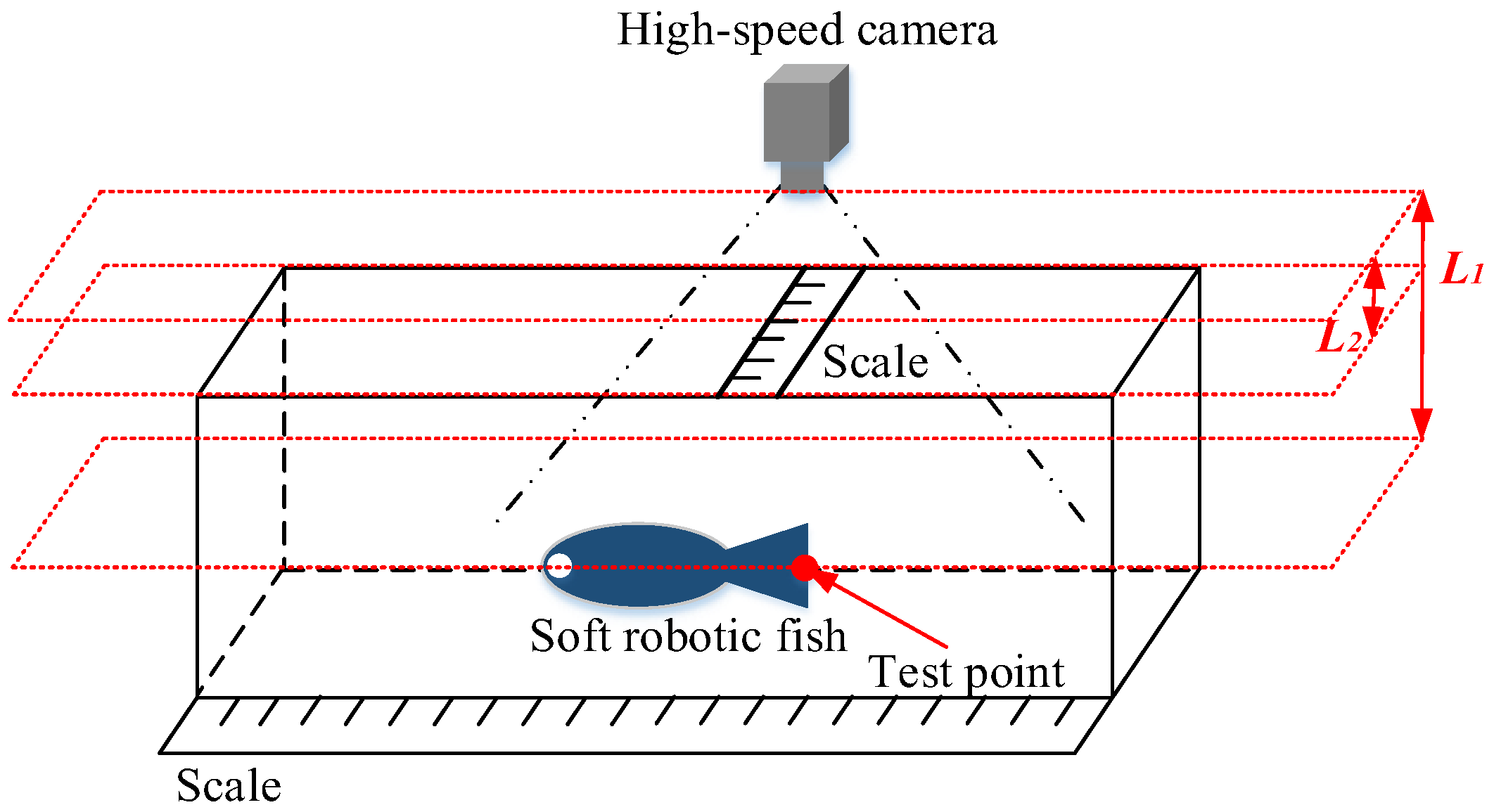
5.2. Displacement of the Soft Robotic Fish
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Breder, C.M. The Locomotion of Fishes. Zoologica 1926, 4, 159–297. [Google Scholar] [CrossRef]
- Webb, P.W. Form and Function in Fish Swimming. Sci. Am. 1984, 251, 72–82. [Google Scholar] [CrossRef]
- Shen, L.; Jiang, H.; Yang, Z.; Cui, Z. Complex modal analysis of the movements of swimming fish propelled by body and/or caudal fin. Wave Motion 2018, 78, 83–97. [Google Scholar]
- Li, Z.; Li, B.; Li, H.; Xia, G. Pectoral Fin Propulsion Performance Analysis of Robotic Fish with Multiple Degrees of Freedom Based on Burst-and-Coast Swimming Behavior Stroke Ratio. Biomimetics 2024, 9, 301. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.W.; Yu, K.; Yan, Y.C. Research Status and Development Trend of Bionic Robot Fish with BCF Propulsion Model. Small Spec. Electr. Mach. 2016, 1, 75–80. [Google Scholar]
- Zhang, C.G. Simulation Analysis of Bionic Robot Fish Based on MFC Materials. Math. Probl. Eng. 2019, 2019, 2720873. [Google Scholar] [CrossRef]
- Luo, Y.; Xiao, Q.; Shi, G. A fluid–structure interaction study on a bionic fish fin with non-uniform stiffness distribution. J. Offshore Mech. Arct. Eng. 2020, 142, 051902. [Google Scholar] [CrossRef]
- Chen, B.; Zhang, J.; Meng, Q.; Dong, H.; Jiang, H. Complex Modal Characteristic Analysis of a Tensegrity Robotic Fish’s Body Waves. Biomimetics 2024, 9, 6. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.H.; Gong, W.J.; Chen, H.; Wang, S.; Zhang, G.J. Research on the Turning Maneuverability of a Bionic Robotic Dolphin. IEEE Access 2022, 10, 7368–7383. [Google Scholar] [CrossRef]
- Chen, D.; Wang, B.; Xiong, Y.; Zhang, J.; Tong, R.; Meng, Y.; Yu, J. Design and Analysis of a Novel Bionic Tensegrity Robotic Fish with a Continuum Body. Biomimetics 2024, 9, 19. [Google Scholar] [CrossRef] [PubMed]
- Xie, C.H.; Wu, Y.; Liu, Z.S. Modeling and active vibration control of lattice grid beam with piezoelectric fiber composite using fractional order PD mu algorithm. Compos. Struct. 2018, 198, 126–134. [Google Scholar] [CrossRef]
- Rao, M.N.; Schmidt, R.; Schroder, K.U. Large deflection electro-mechanical analysis of composite structures bonded with macro-fiber composite actuators considering thermal loads. Eng. Comput. 2021, 38, 1459–1480. [Google Scholar] [CrossRef]
- Chau, K.W.; Bornassi, S.; Ghalandari, M.; Mosavi, A.; Shamshirband, S. Investigation of submerged structures’ flexibility on sloshing frequency using a boundary element method and finite element analysis. Eng. Appl. Comput. Fluid Mech. 2019, 13, 519–528. [Google Scholar]
- Yu, F.; He, B.; Yan, T.; Liu, J. Hydrodynamic numerical simulation and prediction of bionic fish based on computational fluid dynamics and multilayer perceptron. Eng. Appl. Comput. Fluid Mech. 2022, 16, 858–878. [Google Scholar]
- Wang, R. Research on Hydrodynamic Performacne of Fishlike Robot Undergoing Steady State Swimming. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2010. [Google Scholar]
- Gao, L.; Qin, H.; Li, P. Hydrodynamic analysis of fish’s traveling wave based on grid deformation technique. Int. J. Offshore Polar Eng. 2021, 31, 178–185. [Google Scholar] [CrossRef]
- Park, H.C.; Lee, J.E.; Choi, H.S.; Kyung, J.; Yun, D.; Jeong, S.; Ryu, Y. Application of FSI (Fluid Structure Interaction) to biomimetic robot fish. In Proceedings of the 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Republic of Korea, 30 October–2 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 439–441. [Google Scholar]
- Hua, R.H.; Chen, H.; Yuan, X.X.; Tang, Z.G. Trimming analysis of flexible aircrafts based on computational fluid dynamics/computational structural dynamics coupling methodology. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 235, 219–237. [Google Scholar]
- Lauder, G.V.; Tytell, E.D. Hydrodynamics of undulatory propulsion. Fish Physiol. 2006, 23, 425–468. [Google Scholar]
- Elger, D.F.; LeBret, B.A.; Crowe, C.T.; Roberson, J.A. Engineering Fluid Mechanics; Higher Education Press: Beijing, China, 2013. [Google Scholar]
- He, X.; Jiao, W.; Cao, W.; Wang, C. Influence of Surface Roughness on the Pump Performance Based on Computational Fluid Dynamics. IEEE Access 2019, 7, 105331–105341. [Google Scholar] [CrossRef]
- Tanaka, I.; Nagai, M. Hydrodynamic of resistance and propulsion-learn from the fast swimming ability of aquatic animals. Ship Ocean Found. 1996, 14–19. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter Value |
|---|---|
| Density (kg/m3) | 1820 |
| Molar mass (g/mol) | 521 |
| Kinematic viscosity (cSt) | 0.75 |
| Absolute viscosity (cSt) | 1.4 |
| Item | Parameter |
|---|---|
| Body length (mm) | 167 |
| Maximum body height (mm) | 55 |
| Caudal fin height (mm) | 50 |
| Body thickness (mm) | CFRP 0.2 |
| Actuator type | M-8528-P1 |
| Actuator size (mm) | 112 × 40 |
| Active area size (mm) | 85 × 28 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C. Fluid–Structure Interaction Analysis of a Bionic Robotic Fish Based on a Macrofiber Composite Material. Biomimetics 2025, 10, 393. https://doi.org/10.3390/biomimetics10060393
Zhang C. Fluid–Structure Interaction Analysis of a Bionic Robotic Fish Based on a Macrofiber Composite Material. Biomimetics. 2025; 10(6):393. https://doi.org/10.3390/biomimetics10060393
Chicago/Turabian StyleZhang, Chenghong. 2025. "Fluid–Structure Interaction Analysis of a Bionic Robotic Fish Based on a Macrofiber Composite Material" Biomimetics 10, no. 6: 393. https://doi.org/10.3390/biomimetics10060393
APA StyleZhang, C. (2025). Fluid–Structure Interaction Analysis of a Bionic Robotic Fish Based on a Macrofiber Composite Material. Biomimetics, 10(6), 393. https://doi.org/10.3390/biomimetics10060393