Multi-User Visible Light Communication and Positioning System Based on Dual-Domain Multiplexing Scheme



Abstract
1. Introduction
2. Materials and Methods
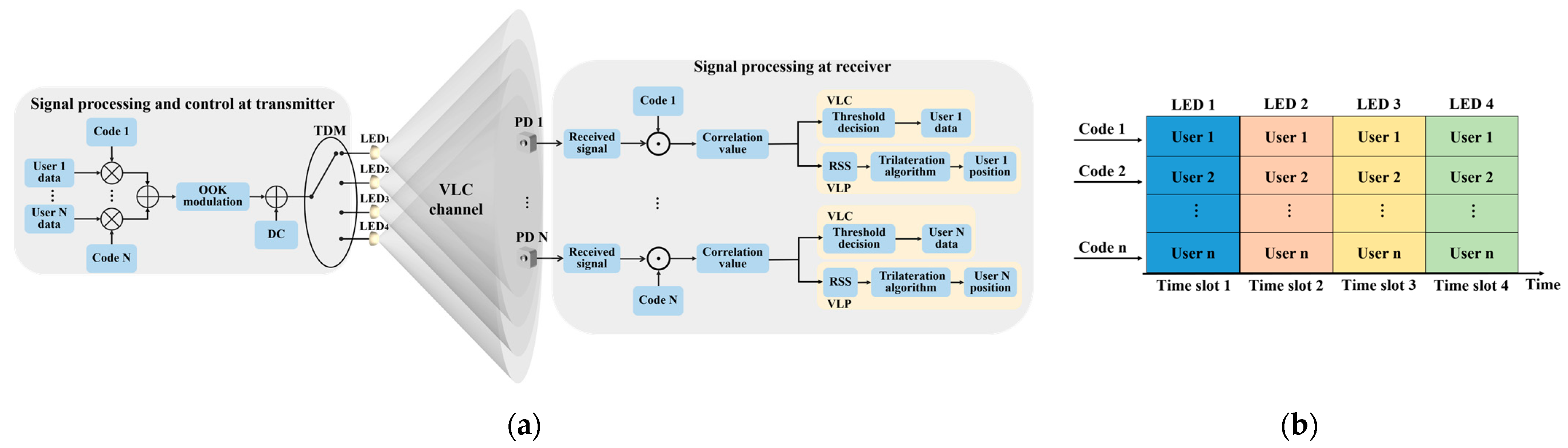
2.1. System Design
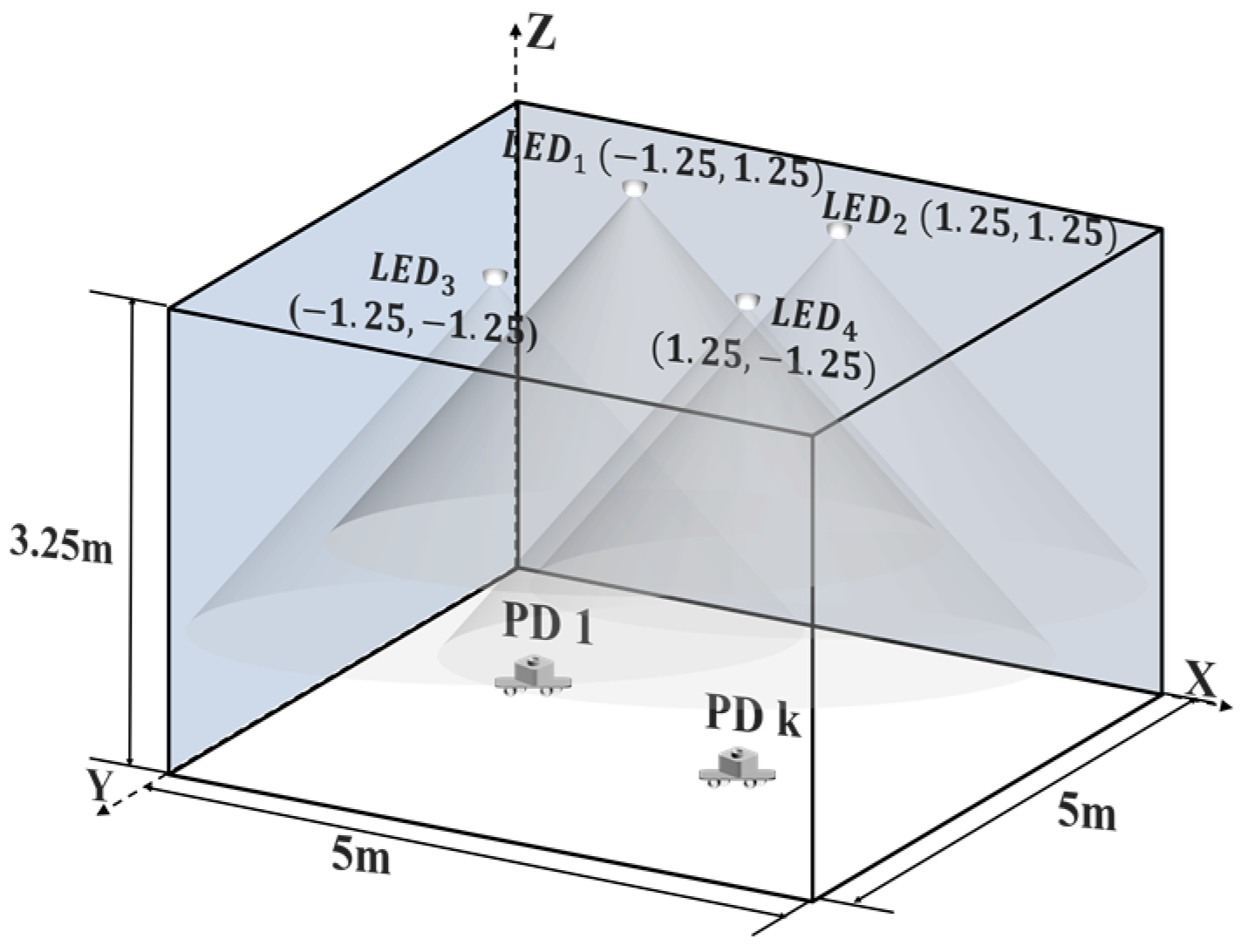
2.2. Simulation Setup
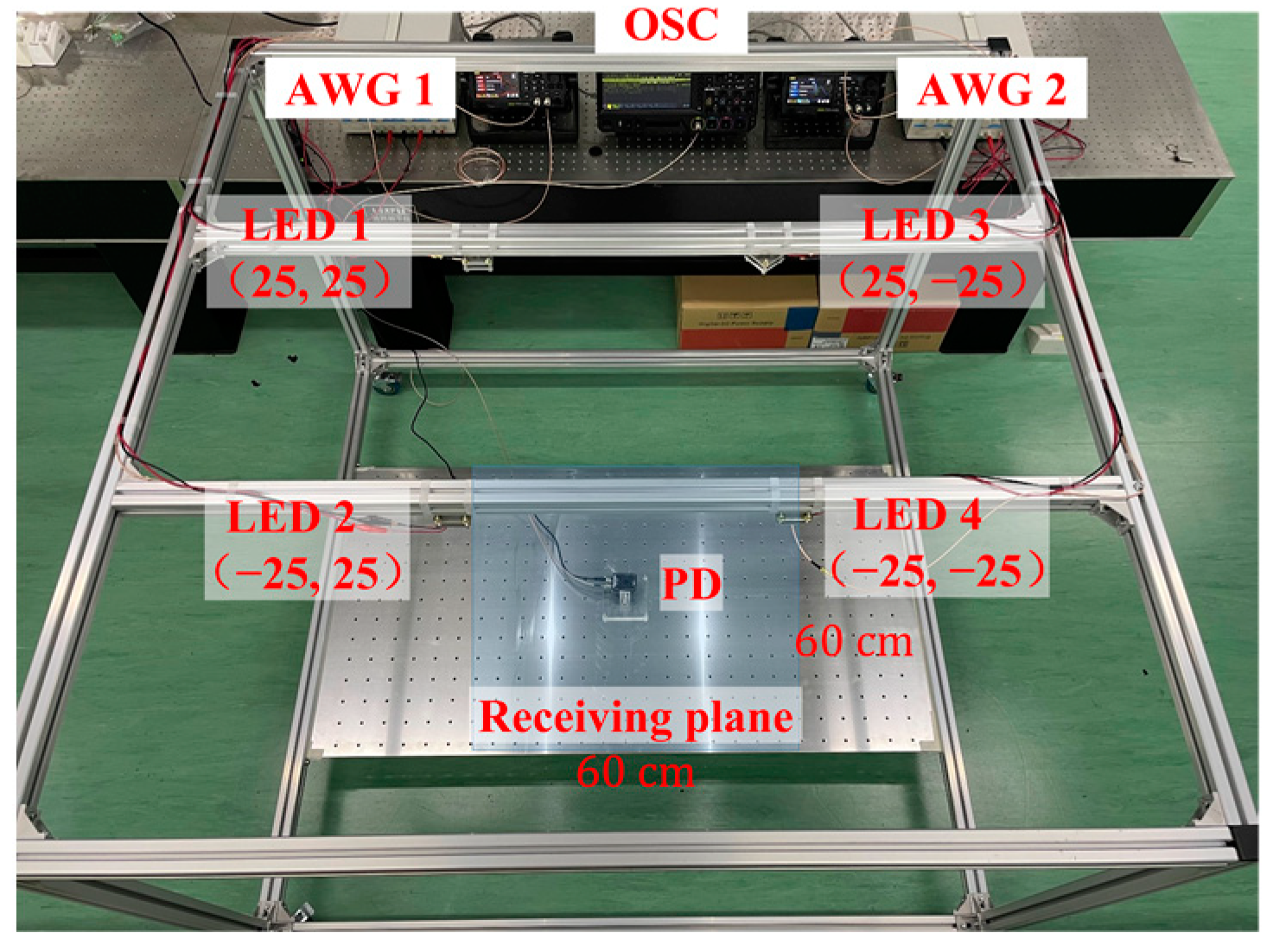
2.3. Experiment Setup
3. Results and Discussion
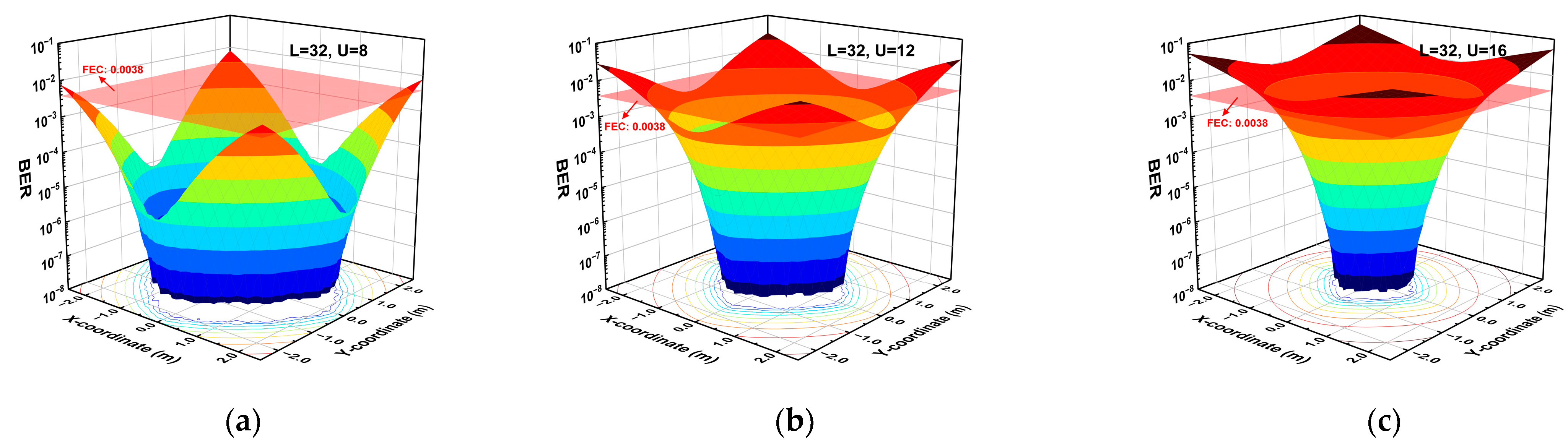
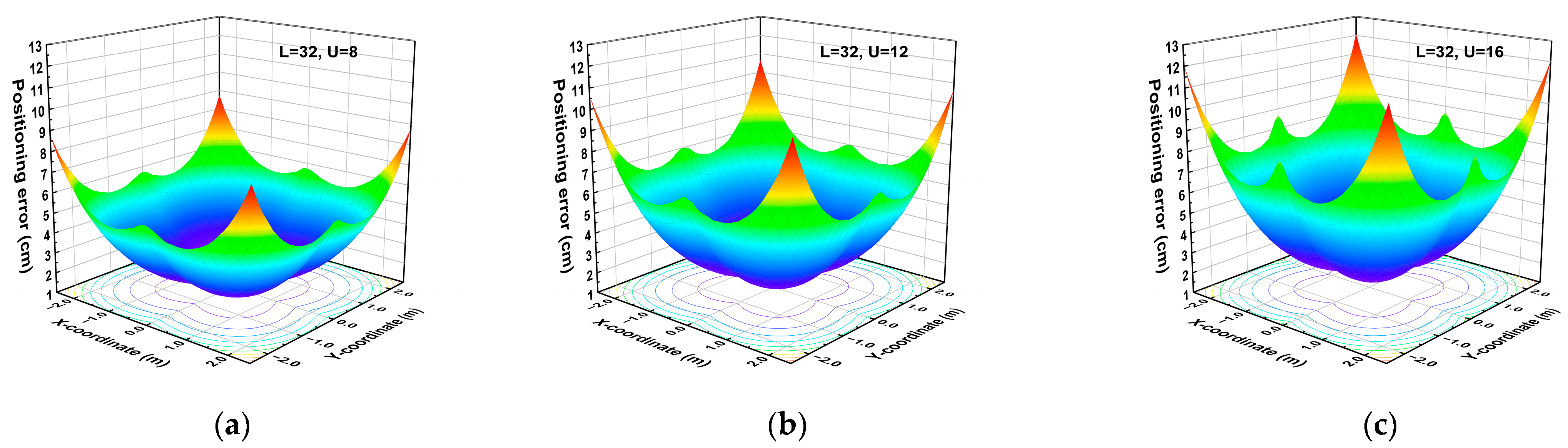
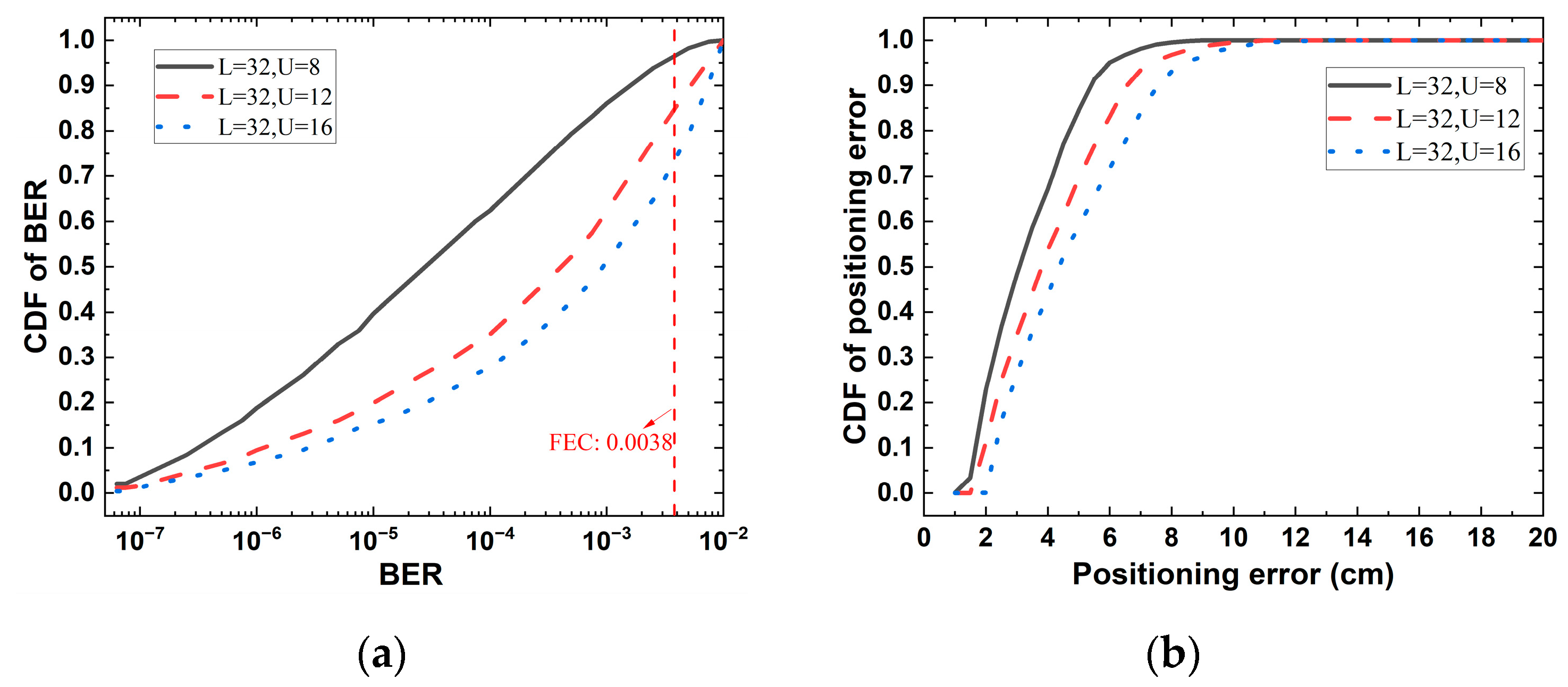
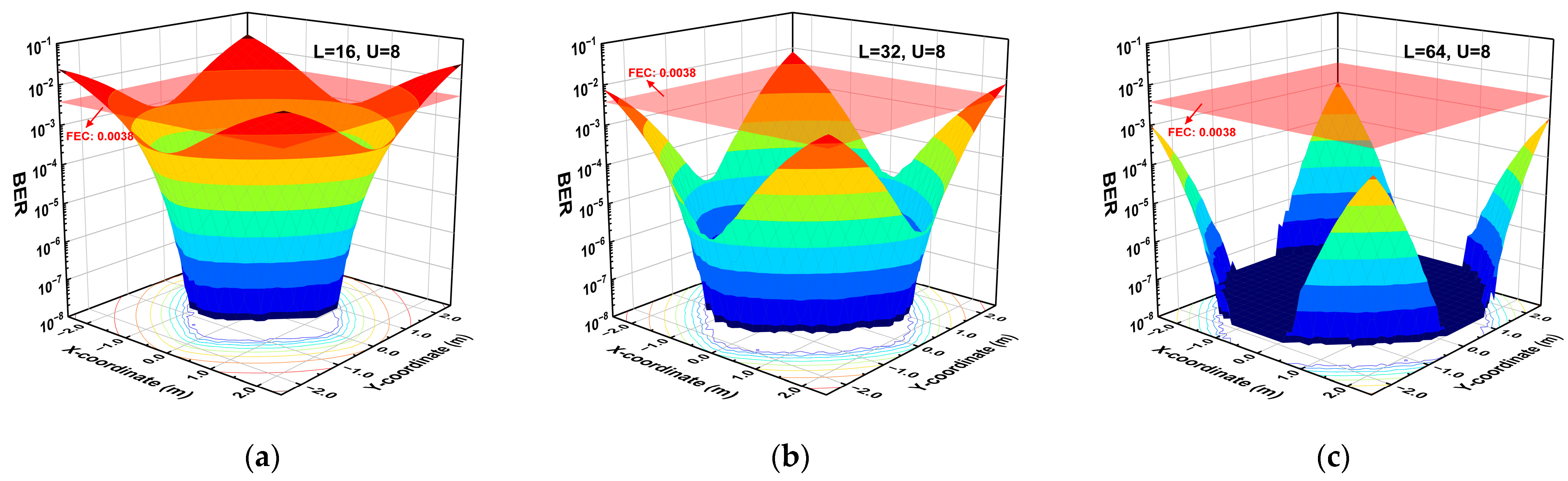
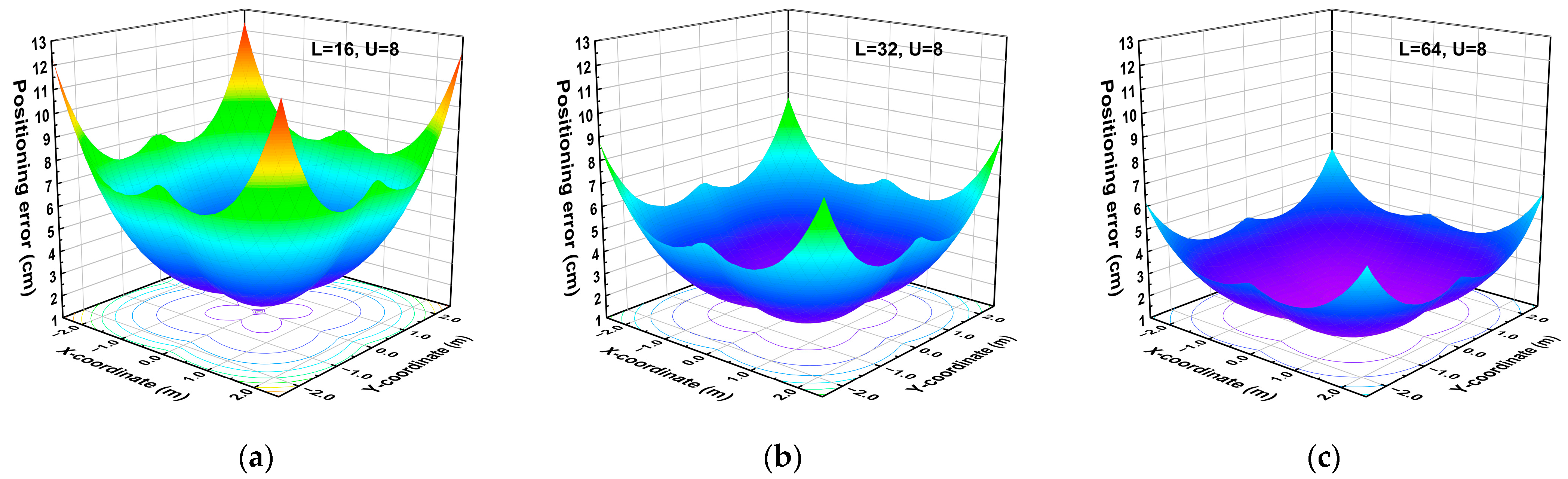
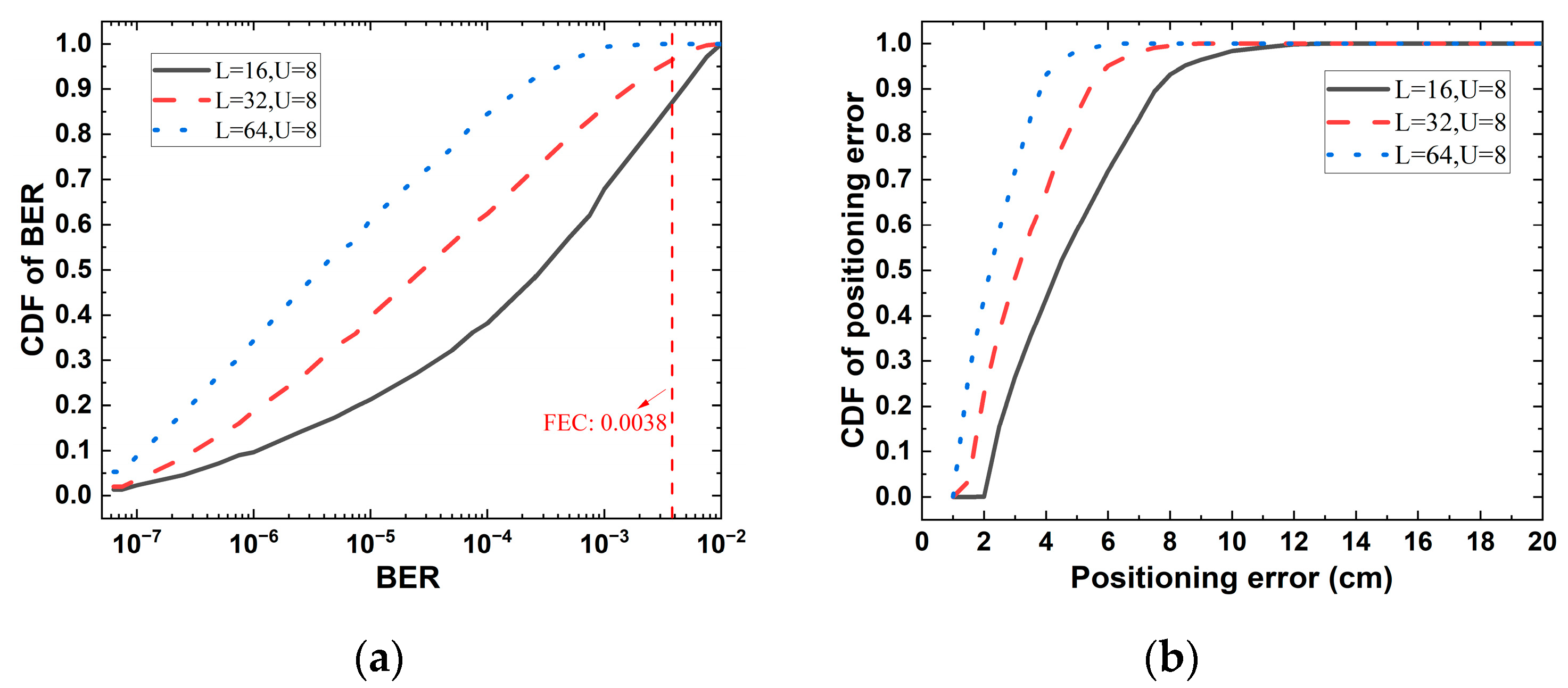
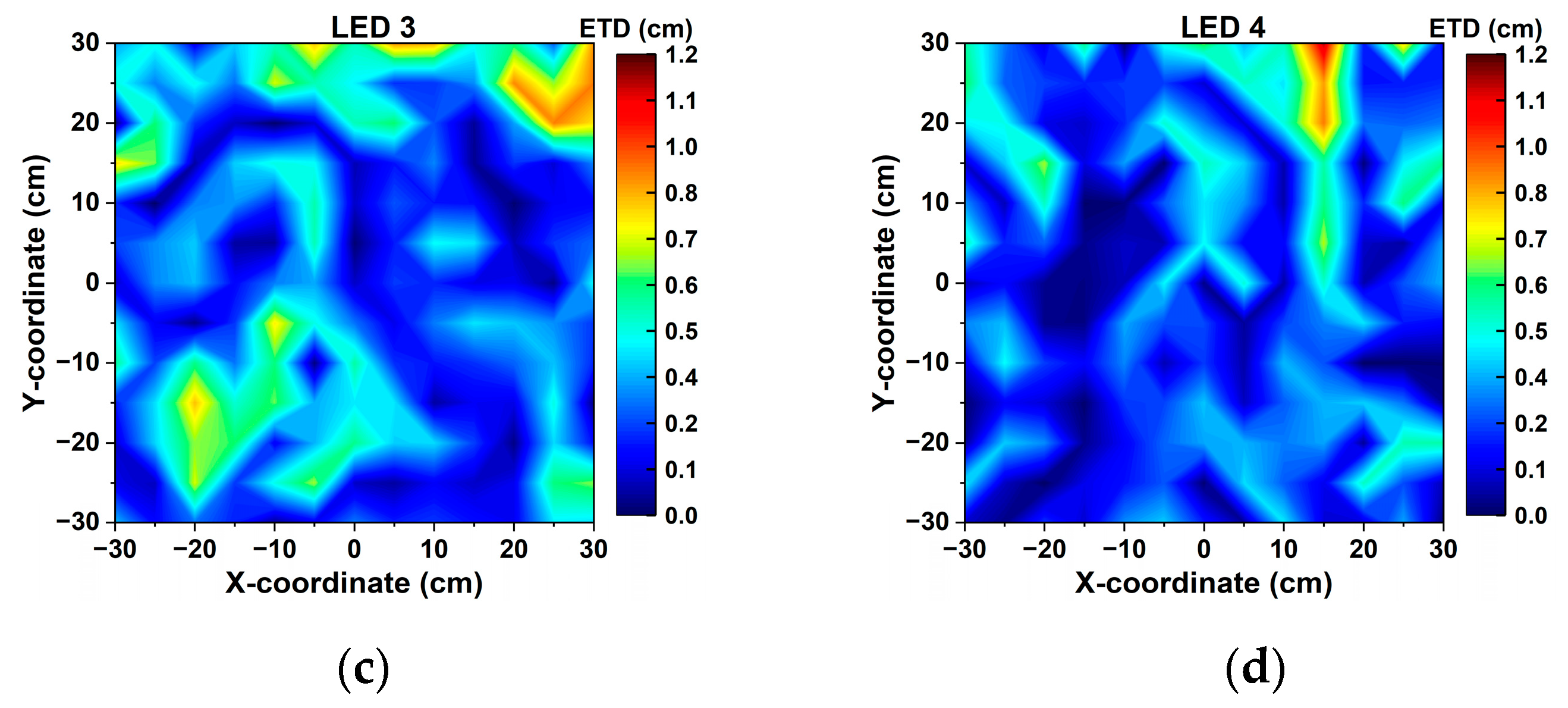
3.1. Simulation Results and Discussion
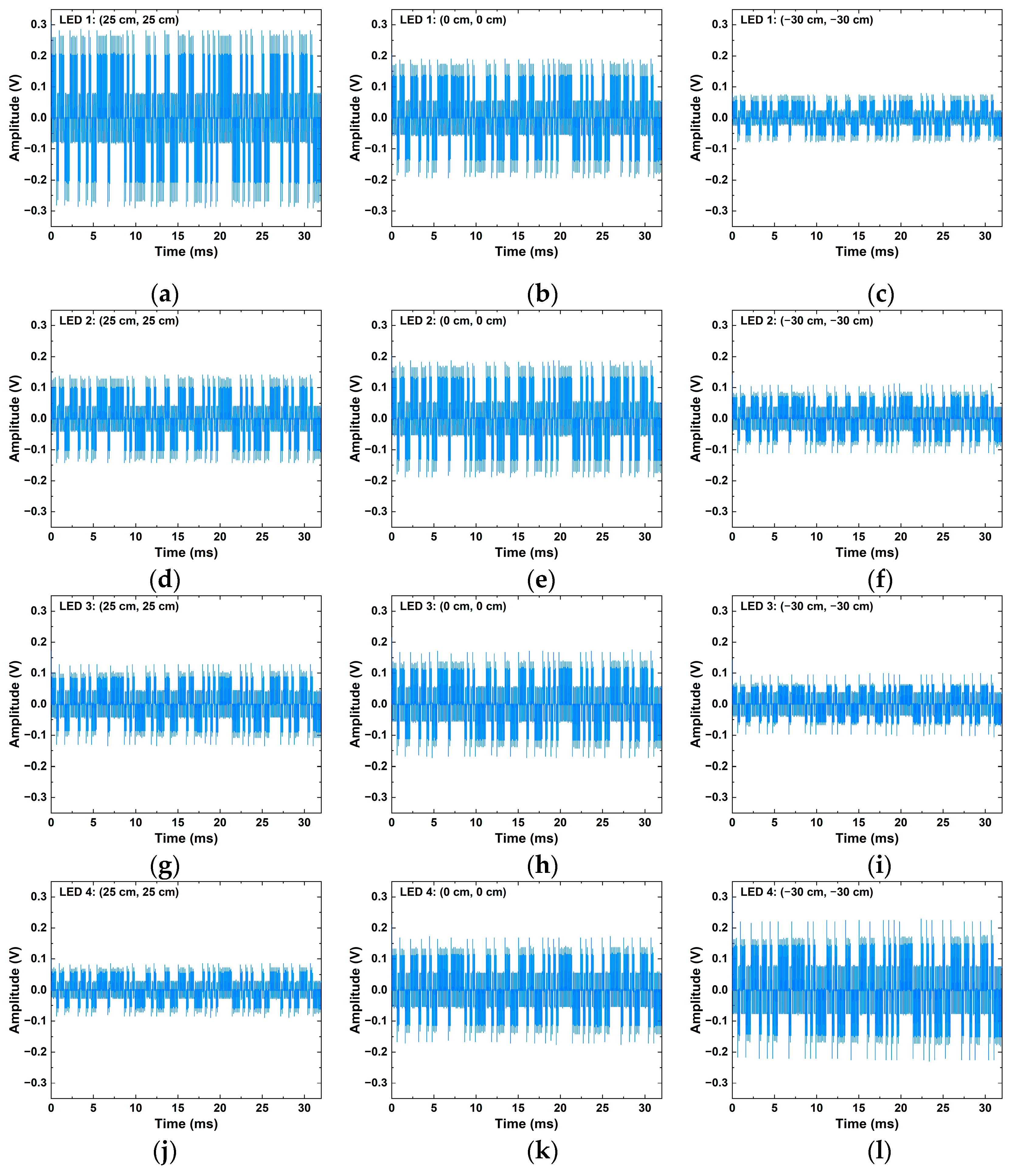
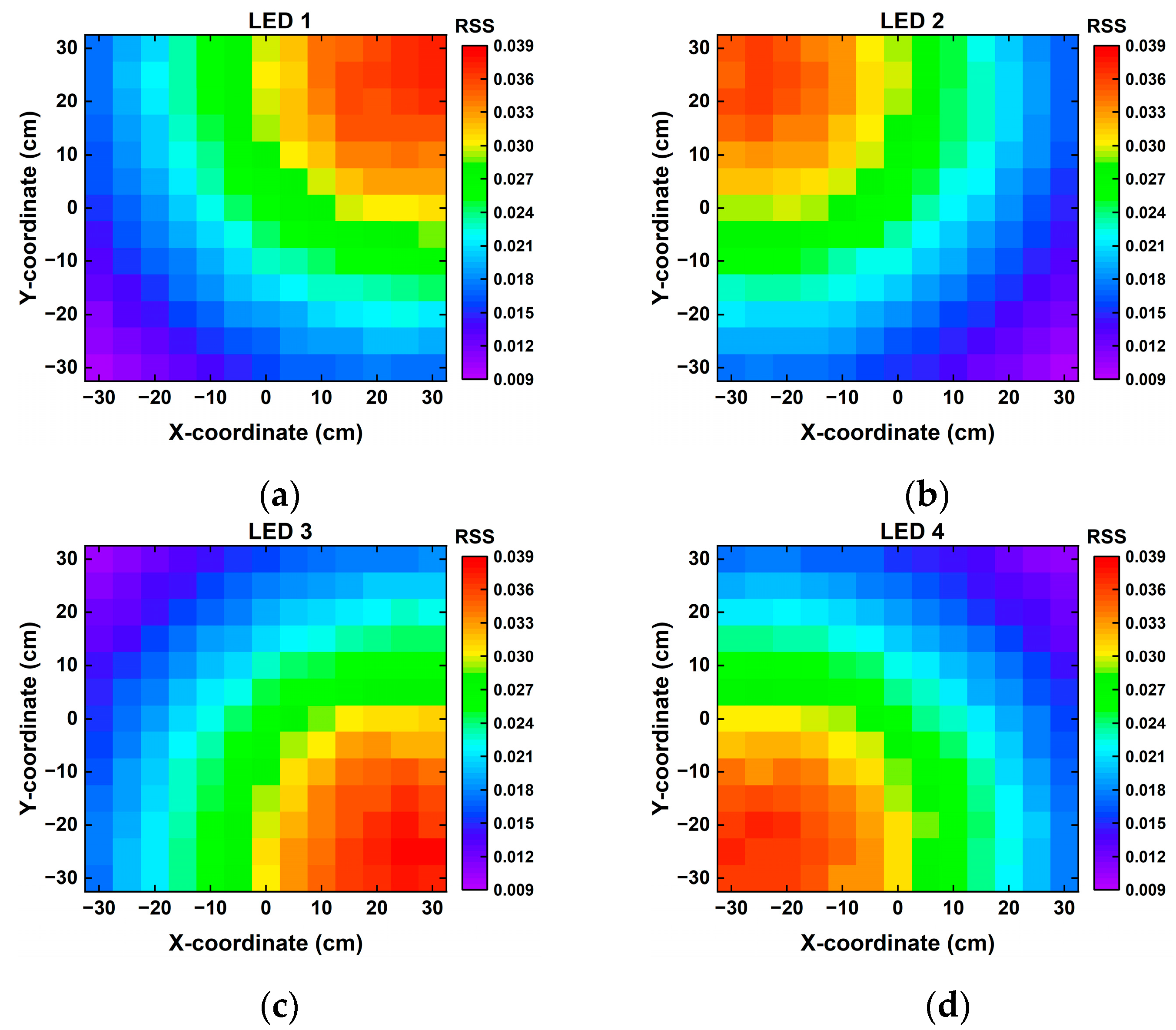
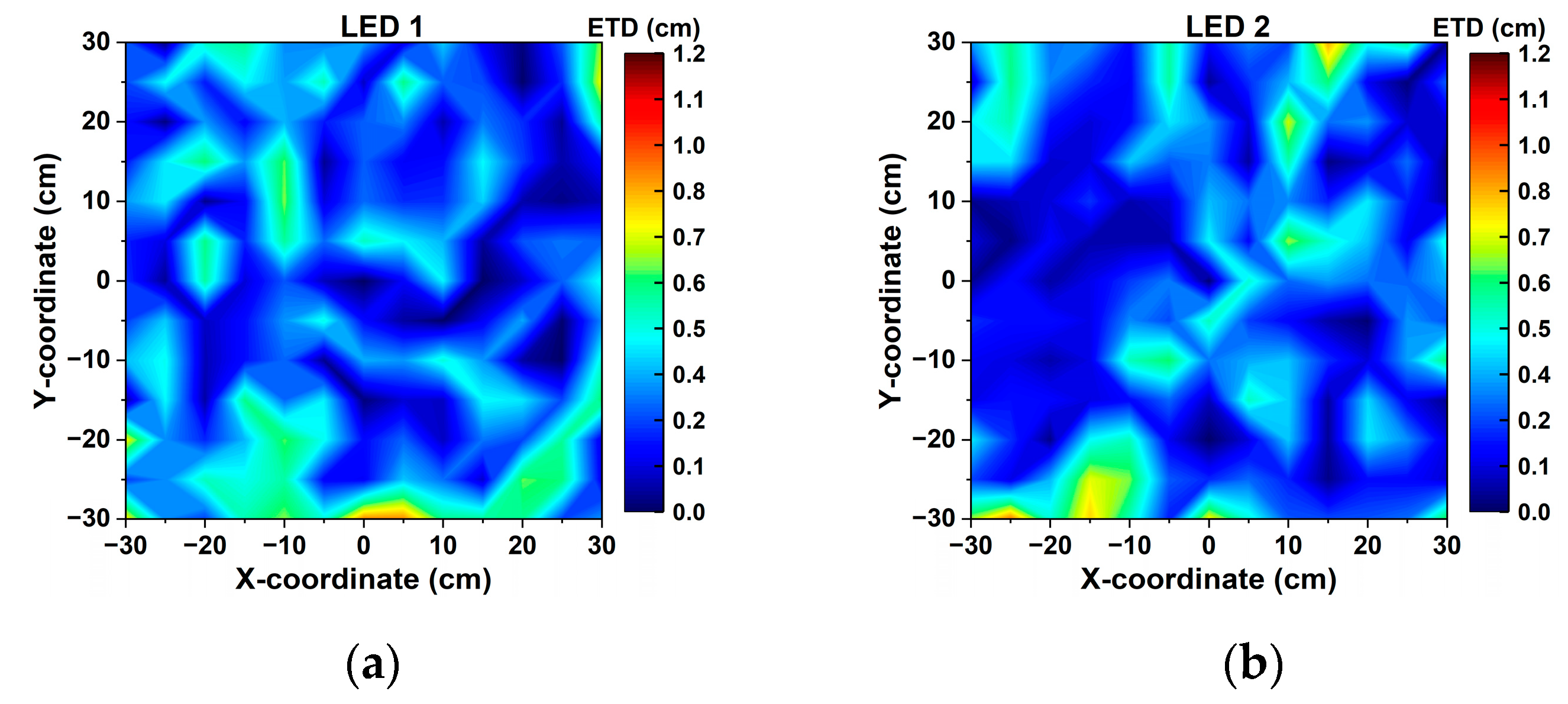
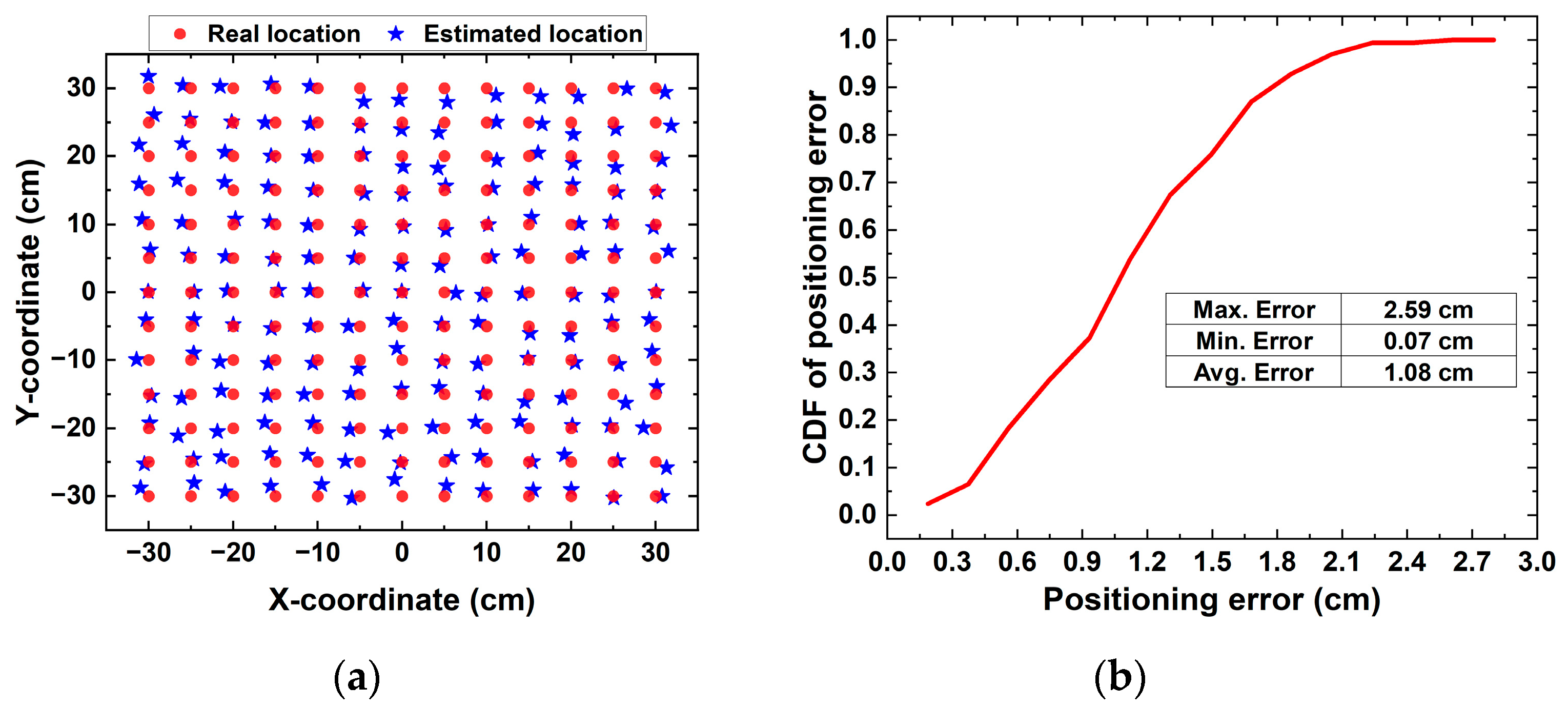
3.2. Experimental Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviation | Description |
| VLC | Visible light communication |
| VLP | Visible light positioning |
| VLCP | visible light communication and positioning |
| 6G | sixth-generation |
| IoT | Internet of Things |
| RF | radio frequency |
| TDM | time-division multiplexing |
| FDM | frequency-division multiplexing |
| CDM | code-division multiplexing |
| DDM | dual-domain multiplexing |
| RSS | receiver signal strength |
| PD | photodetector |
| OOK | on-off keying |
| LOS | light-of-sight |
| AWGN | additive white Gaussian noise |
| LSE | least squares estimation |
| SNR | signal to noise ratio |
| BER | bit-error rate |
| FEC | forward error correction |
| CDF | cumulative distribution function |
| ETD | error of transmission distance |
References
- Nguyen, D.C.; Ding, M.; Pathirana, P.N.; Seneviratne, A.; Li, J.; Niyato, D.; Dobre, O.; Poor, H.V. 6G Internet of Things: A Comprehensive Survey. IEEE Internet Things J. 2021, 9, 359–383. [Google Scholar] [CrossRef]
- Guo, F.; Yu, F.R.; Zhang, H.; Li, X.; Ji, H.; Leung, V.C.M. Enabling Massive IoT Toward 6G: A Comprehensive Survey. IEEE Internet Things J. 2021, 8, 11891–11915. [Google Scholar] [CrossRef]
- Rehman, S.; Ullah, S.; Chong, P.; Yongchareon, S.; Komosny, D. Visible Light Communication: A System Perspective—Overview and Challenges. Sensors 2019, 19, 1153. [Google Scholar] [CrossRef]
- Chi, N.; Zhou, Y.; Wei, Y.; Hu, F. Visible Light Communication in 6G: Advances, Challenges, and Prospects. IEEE Veh. Technol. Mag. 2020, 15, 93–102. [Google Scholar] [CrossRef]
- Chowdhury, M.Z.; Shahjalal, M.; Hasan, M.K.; Jang, Y.M. The Role of Optical Wireless Communication Technologies in 5G/6G and IoT Solutions: Prospects, Directions, and Challenges. Appl. Sci. 2019, 9, 4367. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, L. WiFi-based contactless activity recognition on smartphones. In Proceedings of the 2017 IEEE/CIC International Conference on Communications in China (ICCC), Qingdao, China, 22–24 October 2017; pp. 1–6. [Google Scholar]
- King, T.; Lemelson, H.; Farber, A.; Effelsberg, W. BluePos: Positioning with Bluetooth. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 55–60. [Google Scholar]
- Longkang, W.; Baisheng, N.; Ruming, Z.; Shengrui, Z.; Hailong, L. Zigbee-Based Positioning System for Coal Miners. Procedia Eng. 2011, 26, 2406–2414. [Google Scholar] [CrossRef]
- Zhuang, Y.; Hua, L.; Qi, L.; Yang, J.; Cao, P.; Cao, Y.; Wu, Y.; Thompson, J.; Haas, H. A Survey of Positioning Systems Using Visible LED Lights. IEEE Commun. Surv. Tutor. 2018, 20, 1963–1988. [Google Scholar] [CrossRef]
- Maheepala, M.; Kouzani, A.Z.; Joordens, M.A. Light-Based Indoor Positioning Systems: A Review. IEEE Sens. J. 2020, 20, 3971–3995. [Google Scholar] [CrossRef]
- Mumtaz, S.; Menon, V.G.; Al-Dulaimi, A.; Ashraf, M.I.; Guizani, M. Guest Editorial: Special Issue on Enabling Massive IoT with 6G: Applications, Architectures, Challenges, and Research Directions. IEEE Internet Things J. 2021, 8, 5111–5113. [Google Scholar] [CrossRef]
- Gong, C. Visible Light Communication and Positioning: Present and Future. Electronics 2019, 8, 788. [Google Scholar] [CrossRef]
- Yu, C.; You, X.; Liu, Z.; Chen, J. Conceptual design for indoor visible light communication and positioning cooperative systems. In Proceedings of the 2020 22nd International Conference on Transparent Optical Networks (ICTON), Bari, Italy, 19–23 July 2020; pp. 1–4. [Google Scholar]
- He, P.; Huang, Z.; Huang, M.; Li, W.; Liu, M.; Ji, Y. Indoor intelligent visible light system based on Triple-Domain-Cooperation scheme. In Proceedings of the 2017 16th International Conference on Optical Communications and Networks (ICOCN), Wuzhen, China, 7–10 August 2017; pp. 1–3. [Google Scholar]
- Lin, X.; Zhang, L. Intelligent and Practical Deep Learning Aided Positioning Design for Visible Light Communication Receivers. IEEE Commun. Lett. 2020, 24, 577–580. [Google Scholar] [CrossRef]
- Chen, J.; You, X. Visible light positioning and communication cooperative systems. In Proceedings of the 2017 16th International Conference on Optical Communications and Networks (ICOCN), Wuzhen, China, 7–10 August 2017; pp. 1–3. [Google Scholar]
- Yang, H.; Chen, C.; Zhong, W.-D.; Alphones, A.; Zhang, S.; Du, P. Demonstration of a Quasi-Gapless Integrated Visible Light Communication and Positioning System. IEEE Photonics Technol. Lett. 2018, 30, 2001–2004. [Google Scholar] [CrossRef]
- Nassiri, M.; Baghersalimi, G.; Ghassemlooy, Z. A hybrid VLP and VLC system using m-CAP modulation and fingerprinting algorithm. Opt. Commun. 2020, 473, 125699. [Google Scholar] [CrossRef]
- Chen, D.; Wang, Q.; Wang, J.; Jin, J.; Lu, H.; Feng, L. Performance Evaluation of ZCC and OZCZ Code Set in an Integrated VLCP-CDMA System. IEEE Photonics Technol. Lett. 2022, 34, 846–849. [Google Scholar] [CrossRef]
- Danyang, C.; Kai, F.; Jianping, W.; Huimin, L.; Jianli, J.; Lifang, F.; Hongyao, C.; Zhuo, X.; Yufeng, W. Integrated visible light communication and positioning CDMA system employing modified ZCZ and Walsh code. Opt. Express 2022, 30, 40455–40469. [Google Scholar]
- Wang, Z.; Zhong, W.-D.; Yu, C.; Chen, J.; Francois, C.P.S.; Chen, W. Performance of dimming control scheme in visible light communication system. Opt. Express 2012, 20, 18861–18868. [Google Scholar] [CrossRef]
- Neokosmidis, I.; Kamalakis, T.; Walewski, J.W.; Inan, B.; Sphicopoulos, T. Impact of Nonlinear LED Transfer Function on Discrete Multitone Modulation: Analytical Approach. J. Light. Technol. 2009, 27, 4970–4978. [Google Scholar] [CrossRef]
- Kedia, D.; Duhan, M.; Maskara, S.L. Evaluation of correlation properties of orthogonal spreading codes for CDMA wireless mobile communication. In Proceedings of the 2010 IEEE 2nd International Advance Computing Conference (IACC), Patiala, India, 19–20 February 2010; pp. 325–330. [Google Scholar]
- Qiu, Y.; Chen, S.; Chen, H.-H.; Meng, W. Visible Light Communications Based on CDMA Technology. IEEE Wirel. Commun. 2018, 25, 178–185. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Mousa, F.I.K.; Almaadeed, N.; Busawon, K.; Bouridane, A.; Binns, R.; Elliot, I. Indoor visible light communication localization system utilizing received signal strength indication technique and trilateration method. Opt. Eng. 2018, 57, 016107. [Google Scholar] [CrossRef]
- Huang, N.; Gong, C.; Luo, J.; Xu, Z. Design and Demonstration of Robust Visible Light Positioning Based on Received Signal Strength. J. Light. Technol. 2020, 38, 5695–5707. [Google Scholar] [CrossRef]
- Lin, B.; Tang, X.; Ghassemlooy, Z.; Lin, C.; Li, Y. Experimental Demonstration of an Indoor VLC Positioning System Based on OFDMA. IEEE Photonics J. 2017, 9, 1–9. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Output power of each LED (Pt) | 15 W |
| Threshold value (λ) | 0 |
| Lambertian order of emission (ml) | 1 |
| Photodetector responsivity () | 0.4 A/W |
| Modulation index (α) | 0.15 |
| Physical area of Rx (Ar) | 75.4 mm2 |
| Gain of an optical filter (gf) | 1 |
| Gain of an optical concentrator (gc) | 2.4115 |
| Equivalent noise bandwidth (B) | 10 MHz |
| Electronic charge (q) | 1.6 × 10−19 C |
| Background current (Ibg) | 5100 uA |
| Noise bandwidth factor (I2) | 0.562 |
| Denotes Boltzmann’s constant (k) | 1.38064852 × 10−23 m2 kg s−2 K−1 |
| Absolute temperature (Tk) | 295 K |
| Fixed capacitance of photodetector per unit area (η) | 112 pF/cm2 |
| Open loop voltage gain (G) | 10 |
| FET channel noise factor (Γ) | 1.5 |
| FET transconductance (gm) | 30 mS |
| Gate induced drain leakage (I3) | 0.0868 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Yu, C. Multi-User Visible Light Communication and Positioning System Based on Dual-Domain Multiplexing Scheme. Photonics 2023, 10, 306. https://doi.org/10.3390/photonics10030306
Liu Z, Yu C. Multi-User Visible Light Communication and Positioning System Based on Dual-Domain Multiplexing Scheme. Photonics. 2023; 10(3):306. https://doi.org/10.3390/photonics10030306
Chicago/Turabian StyleLiu, Zhongxu, and Changyuan Yu. 2023. "Multi-User Visible Light Communication and Positioning System Based on Dual-Domain Multiplexing Scheme" Photonics 10, no. 3: 306. https://doi.org/10.3390/photonics10030306
APA StyleLiu, Z., & Yu, C. (2023). Multi-User Visible Light Communication and Positioning System Based on Dual-Domain Multiplexing Scheme. Photonics, 10(3), 306. https://doi.org/10.3390/photonics10030306