
New and Improved Criteria on Fundamental Properties of Solutions of Integro—Delay Differential Equations with Constant Delay





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. US, UAS and Integrability of Solutions
- (A1)
- The functions satisfyandwhere and are positive constants.
- (A2)
- There are constants , from (A1), and such thatand
- (A3)
- There are constants , , , from (A2) and such thatand
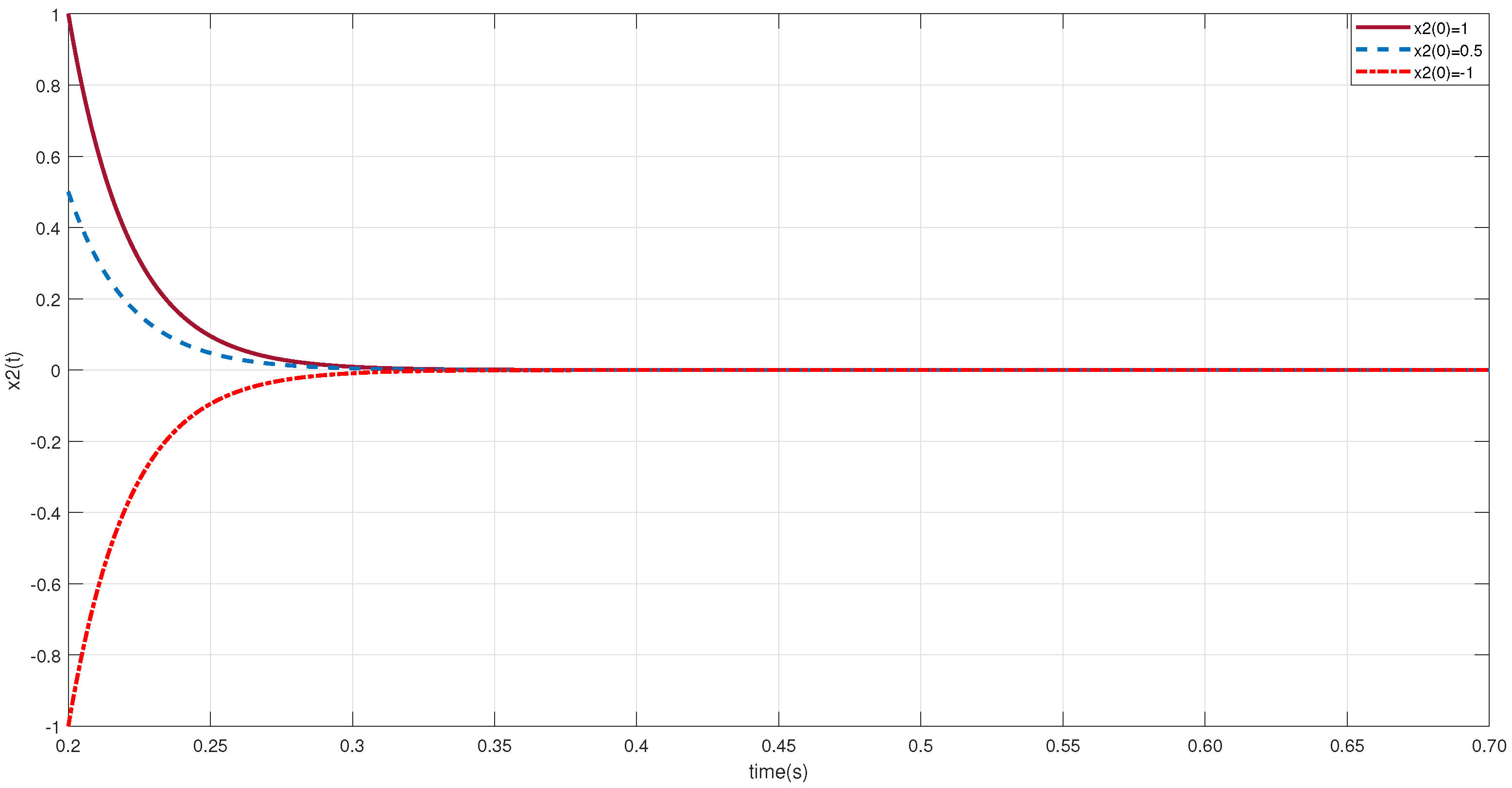
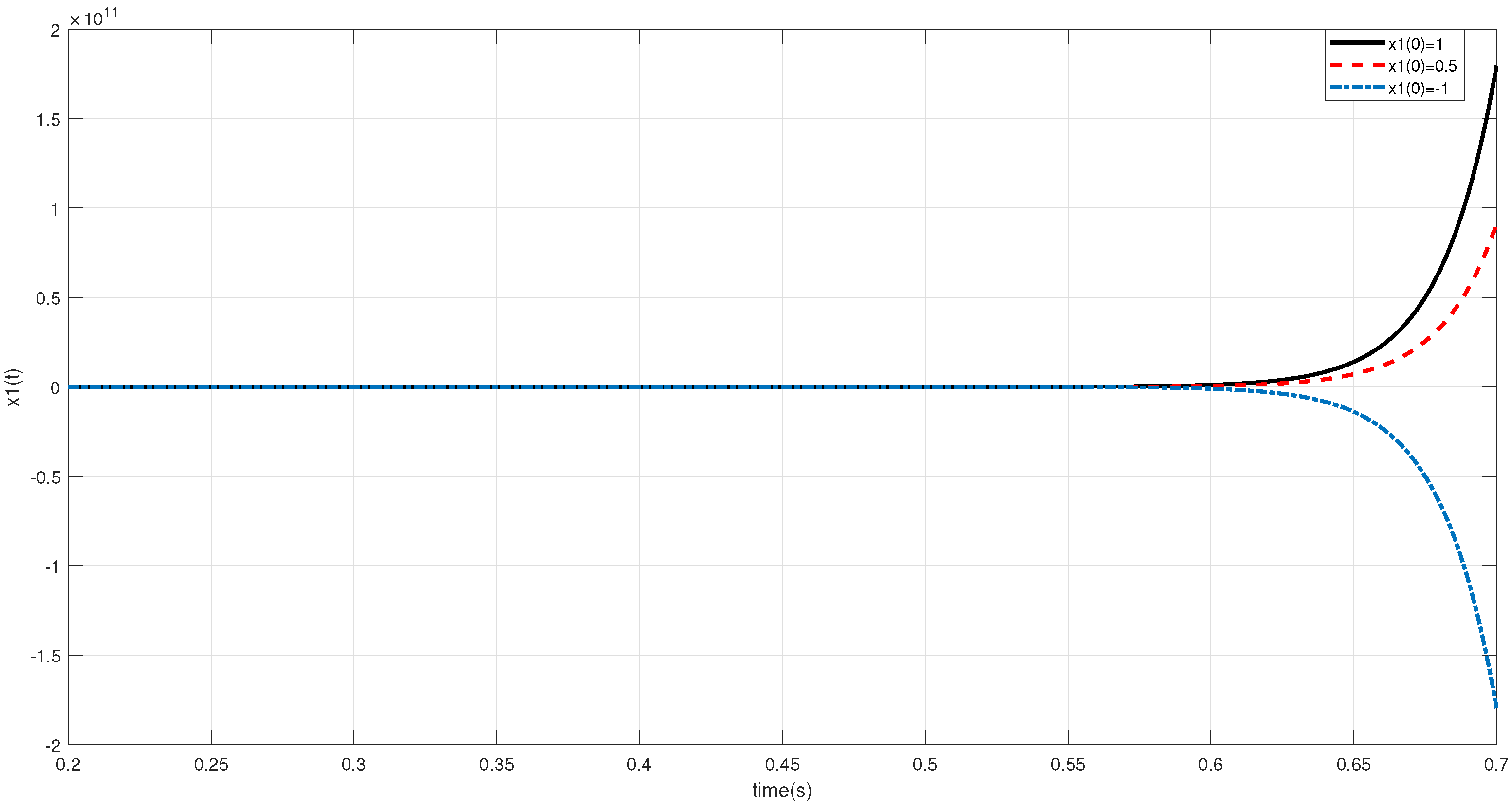
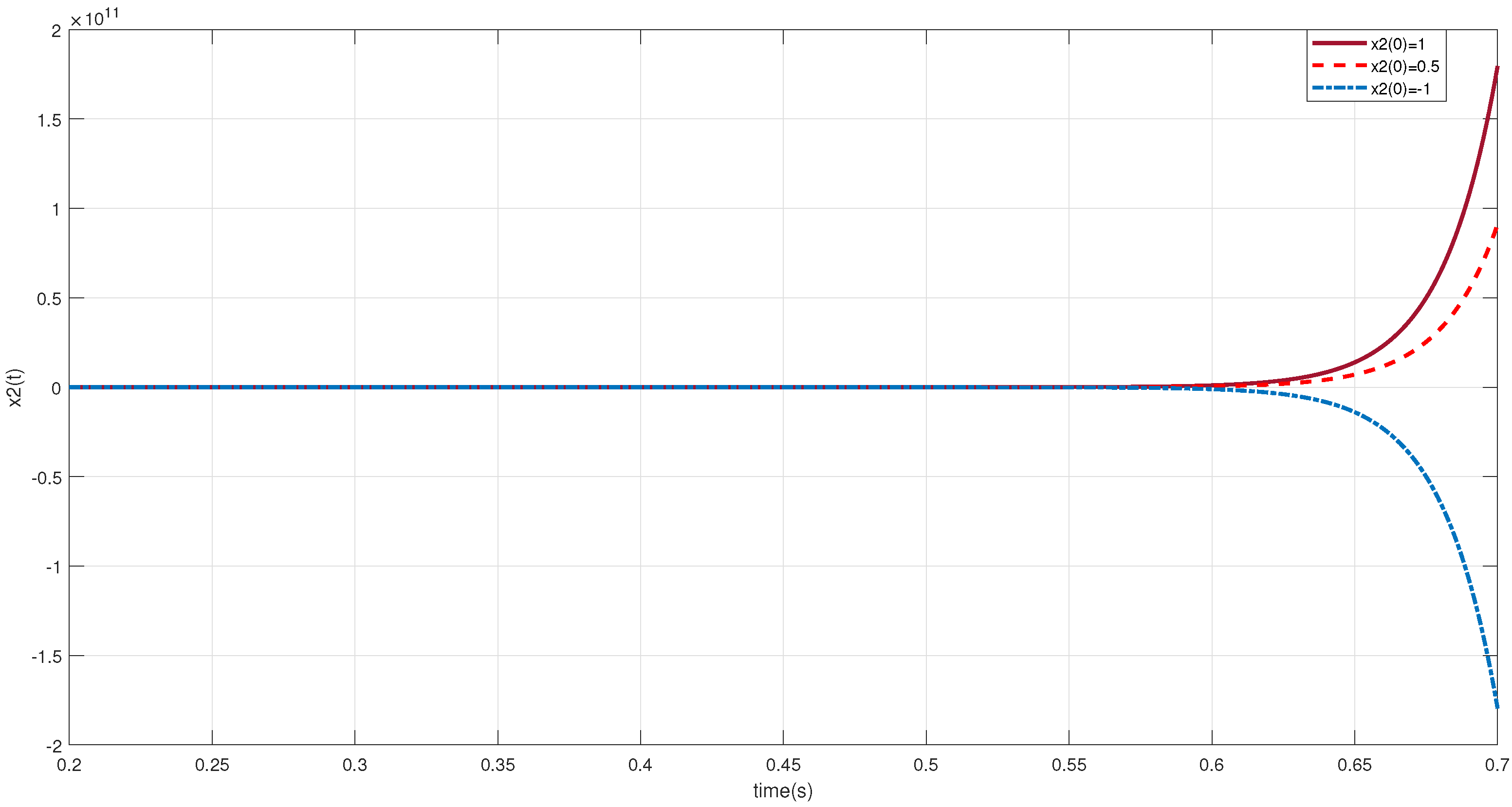
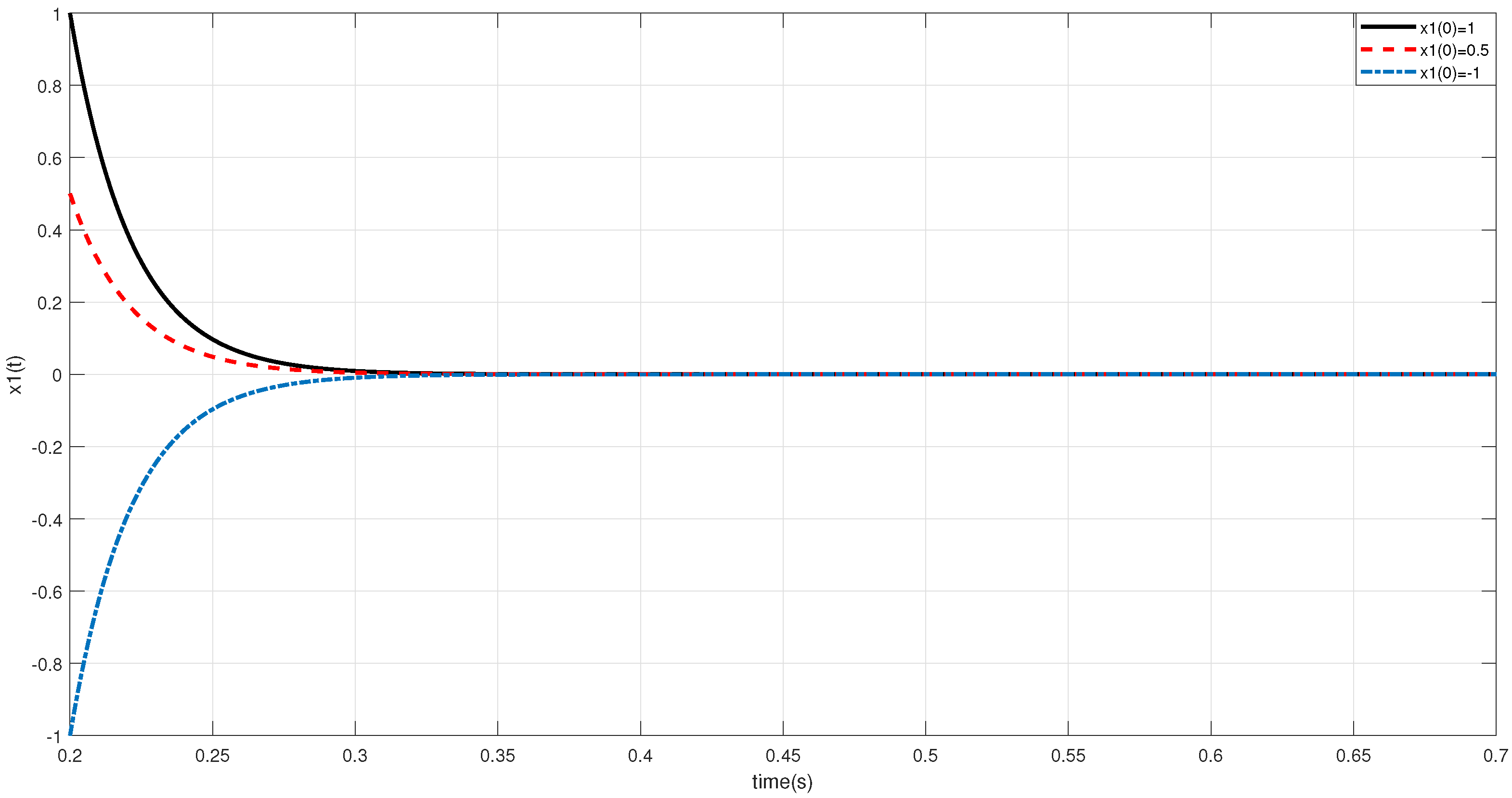
4. Numerical Application
5. Instability of Solutions
- (A4)
- Condition (A1) from Theorem 1 is satisfied withwhere , , , and h are positive constants such that
- (A5)
- There are constants , , h from (A2) and , such thatand
6. Numerical Application
7. Boundedness
- (A6)
- The function satisfiesfor all and for all , where , the function is bounded and there are constants , , and from (A2) such thatand
8. Numerical Application
9. Contributions
- (1)
- The system of IDDEs considered in Zhao et al., [18], system (1), is linear. System (1) also has a simple form. However, perturbed and unperturbed systems of IDDEs (2) and (5), respectively, are non-linear and they have more general forms than system (1). Indeed, instead of the constant matrices , and linear term of (1), we took the variable matrices and the non-linear functions , in both of systems (2) and (5). We also added the nonlinear perturbed term to system (2). These mean that system (2) and (5) extend and improve system (1) from linear case to the nonlinear case.
- (2)
- Zhao et al., [18], Theorem 1 proved a nice result on the asymptotic stability of system (1) (see the above Theorem 1) by using a very interesting approach. Indeed, the authors used the new double integral inequality in terms of LMIs and the LKF (see Section 2) to prove [18], Theorem 1. However, the use of double integral inequality, LMIs and the LKF can cause stronger conditions for the asymptotic stability result of [18], Theorem 1. This case can be seen when we look at the conditions of [18], Theorem 1. In this paper, we did not use the double integral inequality, LMIs and the LKF of [18], Theorem 1. From this point of view, we defined two new, different, interesting and effective LKFs (see the LKFs given by (6) and (12)) and used these two LKFs. Here, the LKFs (6), (12) can lead very less conservative, more suitable and practicable conditions. This case can be checked clearly when we compare the LKF used by Zhao et al., [18], Theorem 1 (see, Section 2) and the LKF (6) used to prove the uniform asymptotic stability result of this paper, Theorem 3.Indeed, to the best of information, up to now, the LKFsandwere not used in the literature to discuss the fundamental behaviors of solutions related to IDDEs and DDEs. Next, indeed, as it is well-known, the investigation of fundamental behaviors of trajectories of non-linear systems of IDDEs and DDEs is a difficult task. However, the effective roles of the LKFs (6) and (12) come from the integral termsandWithout loss of generality, if suitable LKFs could be found, then very less conservative qualitative criteria can be obtained.
- (3)
- The UAS result of this paper, Theorem 3, extends and improves the result of Zhao et al., [18], Theorem 1 under weaker and more suitable conditions. Next, indeed, UAS implies US, but its converse is not true. Additionally, to the best of information, there is no result on the instability of system of IDDEs (5). Theorem 5 is the first instability result in the literature. The uniform stability and integrability results of unperturbed system (5) and boundedness result of perturbed system (2), i.e., Theorems 2, 4 and 6, respectively, are new and original. These theorems have also very suitable and less conservative conditions for proper and related applications in various fields of sciences and engineering.Next, for the cases of US and UAS, sincethe upper bound for the constant delay term h is determined as the following, respectively:As for the case of the instability, sincethe upper bound for the constant delay term h is determined as the following:Finally, for the case of boundedness, sinceit follows thatwhere the function is bounded such that
- (4)
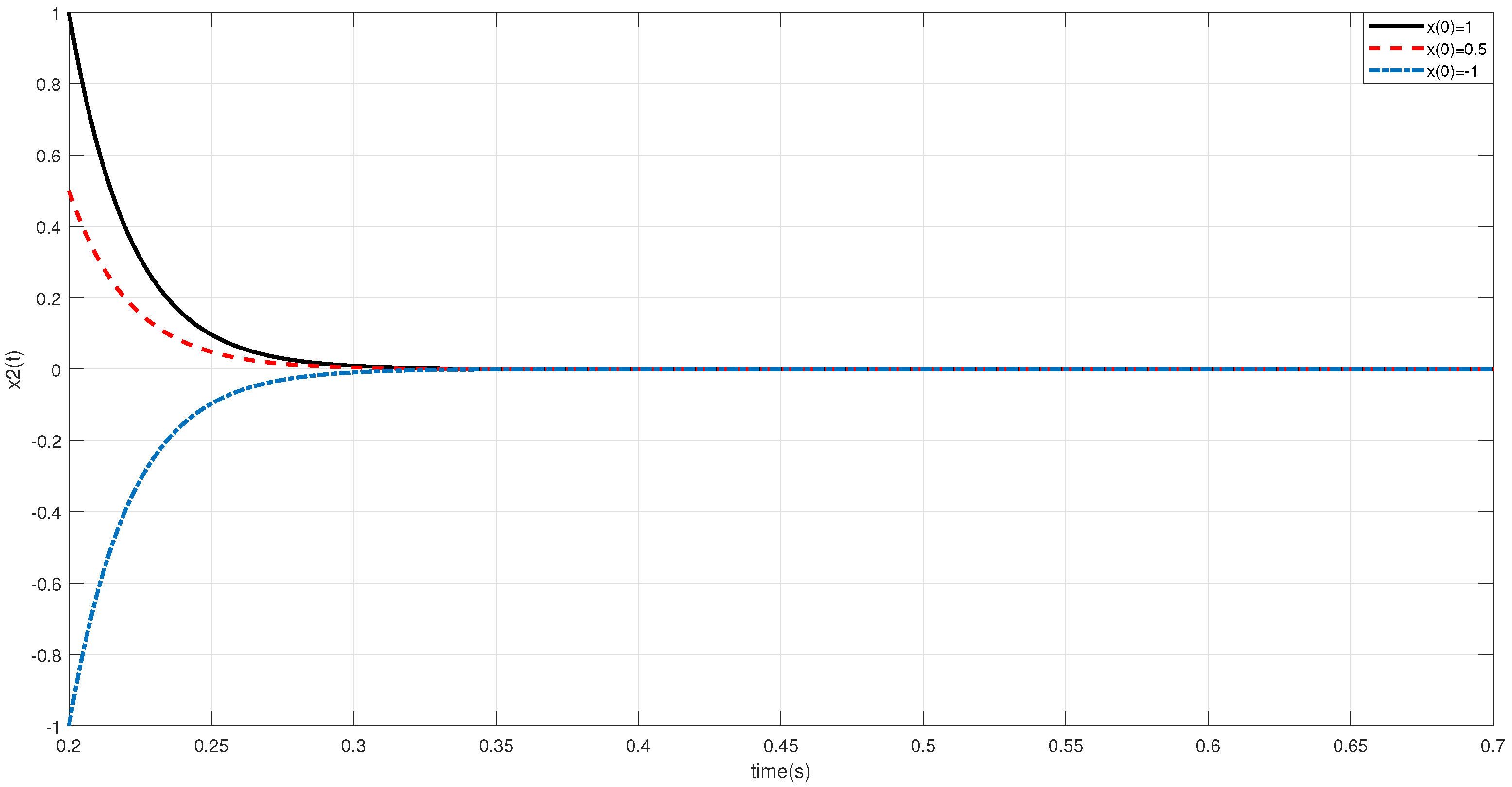
- In this paper, three examples, Examples 1–3, are provided, which satisfy the conditions of the related theorems. These examples are solved by the 4th order Runge-Kutta method in MATLAB software.
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bohner, M.; Tunç, O.; Tunç, C. Qualitative analysis of Caputo fractional integro-differential equations with constant delays. Comp. Appl. Math. 2021, 40, 214. [Google Scholar] [CrossRef]
- Berezansky, L.; Diblík, J.; Svoboda, Z.; Šmarda, Z. Uniform exponential stability of linear delayed integro-differential vector equations. J. Differ. Equ. 2021, 270, 573–595. [Google Scholar] [CrossRef]
- Burton, T.A. Volterra Integral and Differential Equations, 2nd ed.; Mathematics in Science and Engineering, 202; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Graef, J.R.; Tunç, C. Continuability and boundedness of multi-delay functional integro-differential equations of the second order. RACSAM 2015, 109, 169–173. [Google Scholar] [CrossRef]
- Hale, J.K.; Verduyn Lunel, S.M. Introduction to Functional-Differential Equations; Applied Mathematical Sciences, 99; Springer: New York, NY, USA, 1993. [Google Scholar] [CrossRef]
- Huyen, D.T.K.; Yao, J.-C. Solution stability of a linearly perturbed constraint system and applications. Set-Valued Var. Anal. 2019, 27, 169–189. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, D. New stability criterion for time-delay systems via an augmented Lyapunov-Krasovskii functional. Appl. Math. Lett. 2021, 116, 7. [Google Scholar] [CrossRef]
- Nieto, J.J.; Tunç, O. An application of Lyapunov-Razumikhin method to behaviors of Volterra integro-differential equations. RACSAM 2021, 115, 197. [Google Scholar] [CrossRef]
- Raffoul, Y. Exponential stability and instability in finite delay nonlinear Volterra integro-differential equations. Dyn. Contin. Discrete Impuls. Syst. Ser. A Math. Anal. 2013, 1, 95–106. [Google Scholar]
- Tian, J.; Ren, Z.; Zhong, S. A new integral inequality and application to stability of time-delay systems. Appl. Math. Lett. 2020, 101, 7. [Google Scholar] [CrossRef]
- Tian, Y.; Wang, Z. A new multiple integral inequality and its application to stability analysis of time-delay systems. Appl. Math. Lett. 2020, 105, 8. [Google Scholar] [CrossRef]
- Tunç, C.; Tunç, O. New qualitative criteria for solutions of Volterra integro-differential equations. Arab. J. Basic Appl. Sci. 2018, 3, 158–165. [Google Scholar] [CrossRef]
- Tunç, C.; Tunç, O. On the stability, integrability and boundedness analyses of systems of integro-differential equations with time-delay retardation. RACSAM 2021, 115, 1–17. [Google Scholar] [CrossRef]
- Tunç, O. On the behaviors of solutions of systems of non-linear differential equations with multiple constant delays. RACSAM 2021, 115, 164. [Google Scholar] [CrossRef]
- Tunç, O.; Atan, Ö.; Tunç, C.; Yao, J.-C. Qualitative analyses of integro-fractional differential equations with Caputo derivatives and retardations via the Lyapunov-Razumikhin Method. Axioms 2021, 10, 58. [Google Scholar] [CrossRef]
- Xu, X.; Liu, L.; Feng, G. Stability and stabilization of infinite delay systems: A Lyapunov-based approach. IEEE Trans. Automat. Control 2020, 11, 4509–4524. [Google Scholar] [CrossRef]
- Wang, Q. The stability of a class of functional differential equations with infinite delays. Ann. Differ. Equ. 2000, 1, 89–97. [Google Scholar]
- Zhao, N.; Lin, C.; Chen, B.; Wang, Q.G. A new double integral inequality and application to stability test for time-delay systems. Appl. Math. Lett. 2017, 65, 26–31. [Google Scholar] [CrossRef]
- Zhao, J.; Meng, F. Stability analysis of solutions for a kind of integro-differential equations with a delay. Math. Probl. Eng. 2018, 2018, 9519020. [Google Scholar] [CrossRef] [Green Version]
- Zeng, H.B.; He, Y.; Wu, M.; Jinhua, S. New results on stability analysis for systems with discrete distributed delay. Autom. J. IFAC 2015, 60, 189–192. [Google Scholar] [CrossRef]
- Zhu, X.L.; Yang, G.H. New stability criteria for systems with time-varying delay. In Proceedings of the 2008 Chinese Control and Decision Conference, Yantai, China, 2–4 July 2008. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tunç, C.; Wang, Y.; Tunç, O.; Yao, J.-C. New and Improved Criteria on Fundamental Properties of Solutions of Integro—Delay Differential Equations with Constant Delay. Mathematics 2021, 9, 3317. https://doi.org/10.3390/math9243317
Tunç C, Wang Y, Tunç O, Yao J-C. New and Improved Criteria on Fundamental Properties of Solutions of Integro—Delay Differential Equations with Constant Delay. Mathematics. 2021; 9(24):3317. https://doi.org/10.3390/math9243317
Chicago/Turabian StyleTunç, Cemil, Yuanheng Wang, Osman Tunç, and Jen-Chih Yao. 2021. "New and Improved Criteria on Fundamental Properties of Solutions of Integro—Delay Differential Equations with Constant Delay" Mathematics 9, no. 24: 3317. https://doi.org/10.3390/math9243317
APA StyleTunç, C., Wang, Y., Tunç, O., & Yao, J.-C. (2021). New and Improved Criteria on Fundamental Properties of Solutions of Integro—Delay Differential Equations with Constant Delay. Mathematics, 9(24), 3317. https://doi.org/10.3390/math9243317