1. Introduction
The switched system is an example of a hybrid system. Switched systems represent a combination of many continuous or discrete systems such that the systems have a special switching law, and in accordance with this switching rule, the system switches to each subsystem operation. For example, when certain conditions have been established, it switches to the relevant subsystem in accordance with the switching rule. In actual industrial control, economy, and education systems, a system may be constructed with two or more subsystems, and they can be switched between each other. In the last three decades, research interest in the problems of stability analysis and stabilization has increased [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10].
In studying the stability analysis of a switching system, two crucial methods are used to establish the switching rule: the state variable method and time switching method. A major result of the state variable method is that when all subsystems have a common Lyapunov function, many switching strategies exist that ensure the entire system is stable. However, many switching systems do not have a common Lyapunov function; thus, the development of a type of restricted switching law that would make a switching system stable has attracted widespread academic attention.
Du et al. dedicated their research to the problem of the stability of switched systems with unstable subsystems. By using a novel quasi-time-dependent approach, they developed a stability analysis criterion for nonlinear switched systems. The presented switching rule provides fast and slow switching techniques for unstable and stable subsystems, respectively [
2]. Furthermore, design difficulties caused by time delays, asynchronous switching, and nonlinearity for a global stabilization problem were overcome using the Lyapunov–Razumikhin theorem and multiple Lyapunov–Krasovskii functionals [
3]. Wu et al. explored the optimal linear quadratic regulator of switched systems by adopting an embedding-transformation method [
4]. The sufficient conditions for the almost global stability of nonlinear switched systems with time-dependent switching were derived in [
5], which reported that a minimum dwell time constraint must be satisfied. Moreover, Wang et al. proposed the persistent dwell time (PDT) switching law for a class of discrete-time singularly perturbed switched systems [
6]. For continuous-time switched systems with unknown subsystems and infinite-horizon cost functions, Zhang et al. proposed a data-driven optimal scheduling approach [
7]. The Lyapunov stability theorem and genetic algorithm were employed to develop a stabilization and switching law design for switched discrete-time systems [
8]. A unified approach was presented for the control of power electronics converters to solve the stabilization control problems and tracking control problems [
9]. In view of the state-driven switching law, sufficient stability conditions with delay dependence were derived for switched time-delay systems [
10].
Singular perturbation theory has been extensively investigated in recent decades. The mathematical models of engineered and physical systems are usually represented by high-dimensional differential equations. Such high-dimensional systems are called large-scale systems in the literature. Because of the high-dimensional relationship, the design of a controller and analysis of the systems’ stability are relatively difficult. A singular perturbation mode can provide strong and powerful control. In addition, for systems that can be split into two time scales (slow and fast time scales), the singular perturbation technique is undoubtedly the optimal method [
11,
12]. Borisov and Sultanov [
13] considered a singularly perturbed boundary value problem, which arises in Brownian motion, and complete asymptotic expansions were successfully constructed. Lomov’s regularization method was generalized to examine the asymptotics of the solution to systems described by singularly perturbed integrodifferential equations with a rapidly oscillating right-hand side [
14]. The optimal controller for a singularly perturbed wind turbine system was developed through time-scale decomposition with two reduced-order algebraic Riccati equations corresponding to the slow and fast time scales [
15]. Glizer analyzed two types of singularly perturbed nonlinear time-dependent-controlled system with time delays (multiple point-wise and distributed) in the state variables [
16]. Dragan considered a stochastic optimal control problem modeled using a system of singularly perturbed Itô differential equations with two fast time scales and derived the asymptotic structure of the stabilizing solution [
17]. Liu et al. [
18] investigated the feedback control problem in a discrete-time singularly perturbed system under information constraints and employed the uniform quantization method. For an infinite-dimensional system coupling a wave equation with a linear ordinary differential equation, the singular perturbation method achieved stability and Tikhonov results [
19]. Finally, Song et al. investigated the sliding-mode control issue of slow-sampling singularly perturbed systems under a dynamic-event-triggered mechanism [
20].
This paper is unprecedented in its discussion of the combination of singularly perturbed systems and switched systems. First, the slow–fast subsystems of each individual system are decomposed, after which they are used to determine the switching rule by using the state-variables method. This article also proves that according to the switching rule of the slow–fast subsystems, it is possible to ensure that the switched singularly perturbed system is stable under a small . Lyapunov-function-based techniques are employed for the control of switched linear systems.
2. Materials and Methods
Consider the following switched singularly perturbed systems:
where
,
,
is the order of the whole system,
are the control and constant matrices with appropriate dimensions, and
is a small positive singular perturbation parameter. Finally,
i is a switching rule, the values of which are in the finite set
Furthermore, the subsystems of switched singularly perturbed systems (1) can be obtained.
The slow switched singularly perturbed systems are expressed as
and the fast switched singularly perturbed systems are expressed as
where
and
.
The analysis and controller design of switched singularly perturbed systems can generally be accomplished by first separating the original systems (1) into the slow and fast subsystems (2a) and (2b), respectively, and then obtaining the composite results for systems (1). That is, suppose that the subsystem controllers, which are to be designed in accordance with the slow and fast mode performance specifications, have the following form:
and the composite control is expressed as
where
.
Furthermore, the closed-loop forms of individual systems (1) may be rewritten as
where
,
,
, and
.
As indicated, no research article has yet discussed the relationships between the state trajectories of the original systems (1) and reduced systems (2). This is done in the following theorem. First, let
where the matrices
and
respectively satisfy
Theorem 1. Letbe design such that. There then exists ansuch that if the composite controlis applied to system (1), the state and control of the resulting closed-loop individual system, starting from any bounded initial conditions, are approximated byfor all finiteand for all.
Proof. According to the proposed singularly perturbed method, for the slow subsystem (1a), its fast distribution can be ignored, i.e.,
. For system (1b), when we consider
,
can be derived and substituted into system (1a). This results in the system (2a).
Since , the composite control (8) can be obtained from the controller of slow-fast subsystems.
This completes the proof. □
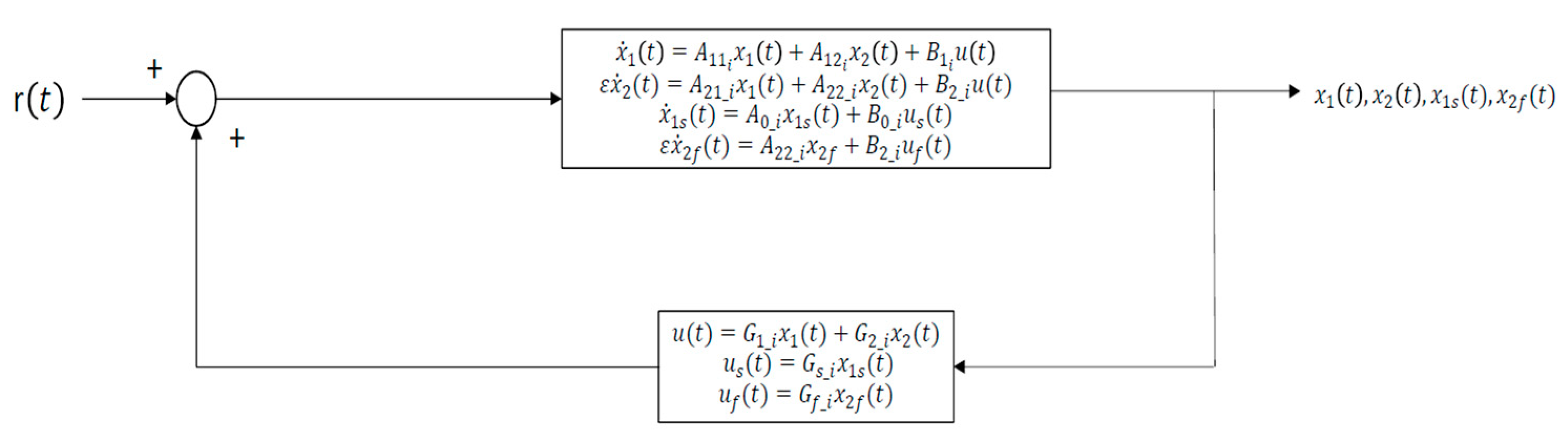
The block diagram of the systems is as
Figure 1.
For the nominal switched linear system
the stability criterion is described by the following lemma.
Lemma 1. There exists a switching law for switched linear system (10) such that the system is asymptotically stable if there exist positive numberssatisfyingsuch thatis an asymptotically stable system [21]. Proof. Assume that is an asymptotically stable system, it makes the time derivative of the Lyapunov function for negative, i.e., owing to for any time, there exists at least one individual system with negative Lyapunov derivative. Thus, the switched linear system (10) is asymptotically stable. □
Since there exists positive numbers such that is an asymptotically stable system, hence, there exists a Lyapunov function V(x) such that a switching law is .
In light of Lemma 1, a convex combination of switched singularly perturbed systems (1) can be written as follows:
where
.
Furthermore, a convex combination of switched singularly perturbed systems for the subsystems (11a) and (11b) can be written as follows:
Hence, from controller (3), the closed-loop forms of the convex combination subsystem are as follows:
and the closed-loop forms of convex combination systems (11) are as follows:
Theorem 2. The slow and fast switched singularly perturbed systems (13a) and (13b) are asymptotically stable if there exist two common positive definite matricesandrespectively such that
for
.
Proof. Following the literature [
11], this proof can be easily made. □
Let
where
and
, and assume
and
.
Hence, the equivalent systems can be written as
where
Furthermore, the closed-loop forms of combination systems (1) may be rewritten as
Then, the similarly transformed system (18) becomes
A sufficient condition for stabilization of the closed-loop switched singularly perturbed systems (18) under the composite controller is established in the following theorem.
Theorem 3. Supposeandare determined using Theorem 1. There then exists a switching law such that the closed-loop switched singularly perturbed system is asymptotically stable for all. Theis obtained using the following LMI procedure:for, where, andare symmetric positive definite matrices,and.
Proof. Define the Lyapunov Function as
Pre- and post-multiplying (22) by
, we obtain
where
. Applying (20a) to (24) results in
If
then
in (25) is negative. It is thus discovered that (24) equals (22).
Similarly, pre- and post-multiplying (23) by
, we obtain
where
. Applying (20b) to (26) results in
In fact, (25) is the same as (23). Because and imply and , .
This completes the proof. □
Remark 1. The switching law of systems (1) can be defined as follows:where, and.
Remark 2. The switching law of subsystems (12) can be defined as follows: Theorem 4. approximations of the switching laws for systems (1) and subsystems (12) can be achieved under the linear state-feedback control expressed in (4).
Proof. This completes the proof. □
3. Example
Consider the switched singularly perturbed system composed of two subsystems given as follows.
Then the slow-fast subsystems of the system (30) are described below.
The slow–fast subsystem of individual system 1:
The slow–fast subsystem of individual system 2:
Let , based on the controller (3) for individual system (31), we can obtain the following controller design.
The controller of slow–fast subsystem for individual system 1:
The controller of slow–fast subsystem for individual system 2:
Furthermore, from the control of switched singularly perturbed system (30), we can obtain the following composite controller design.
The composite control (4) of individual system 1, (30a) and (30b), is:
The composite control (4) of individual system 2, (30c) and (30d), is:
Finally, the switched singularly perturbed systems, (30) and (31), can be stabilized by the controllers, (33) and (32), respectively.
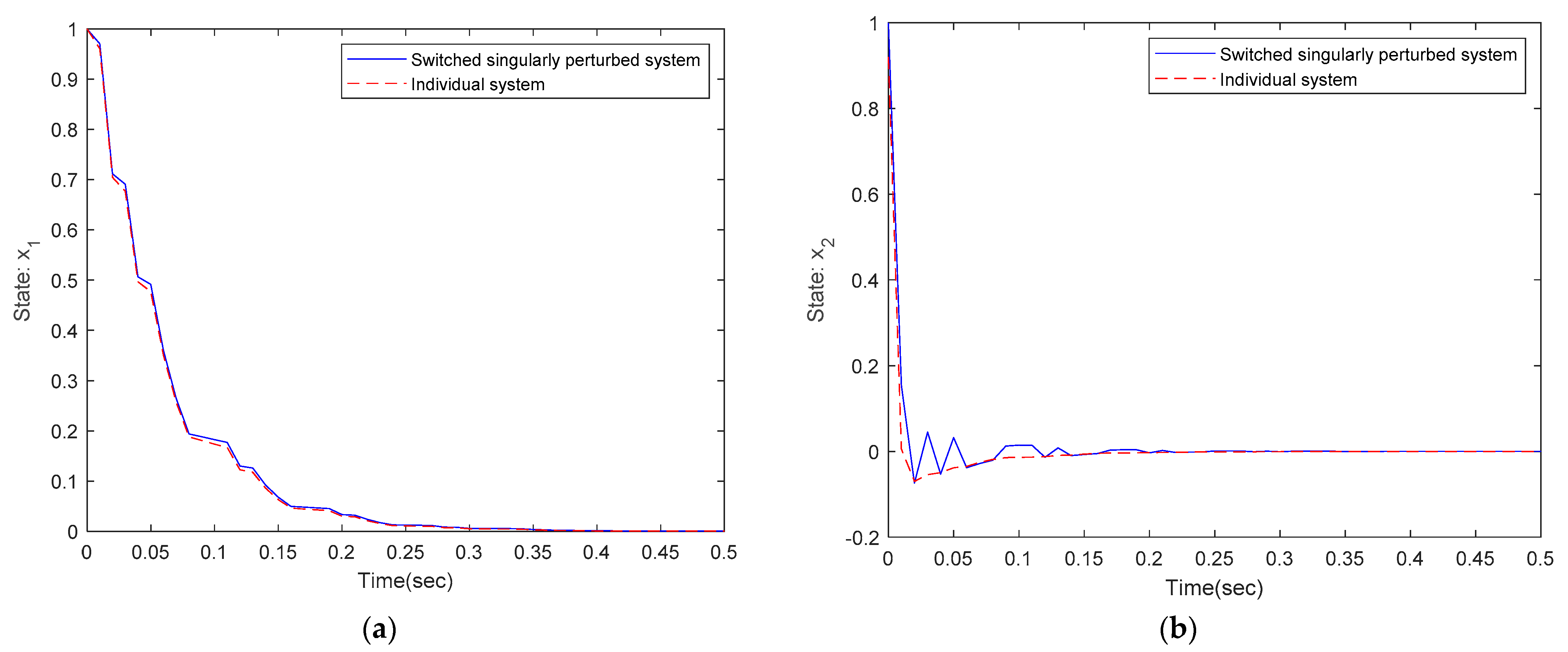
The trajectories for states of the switched singularly perturbed system (30) and its slow-fast system (31) during
are shown in
Figure 2a,b with initial value
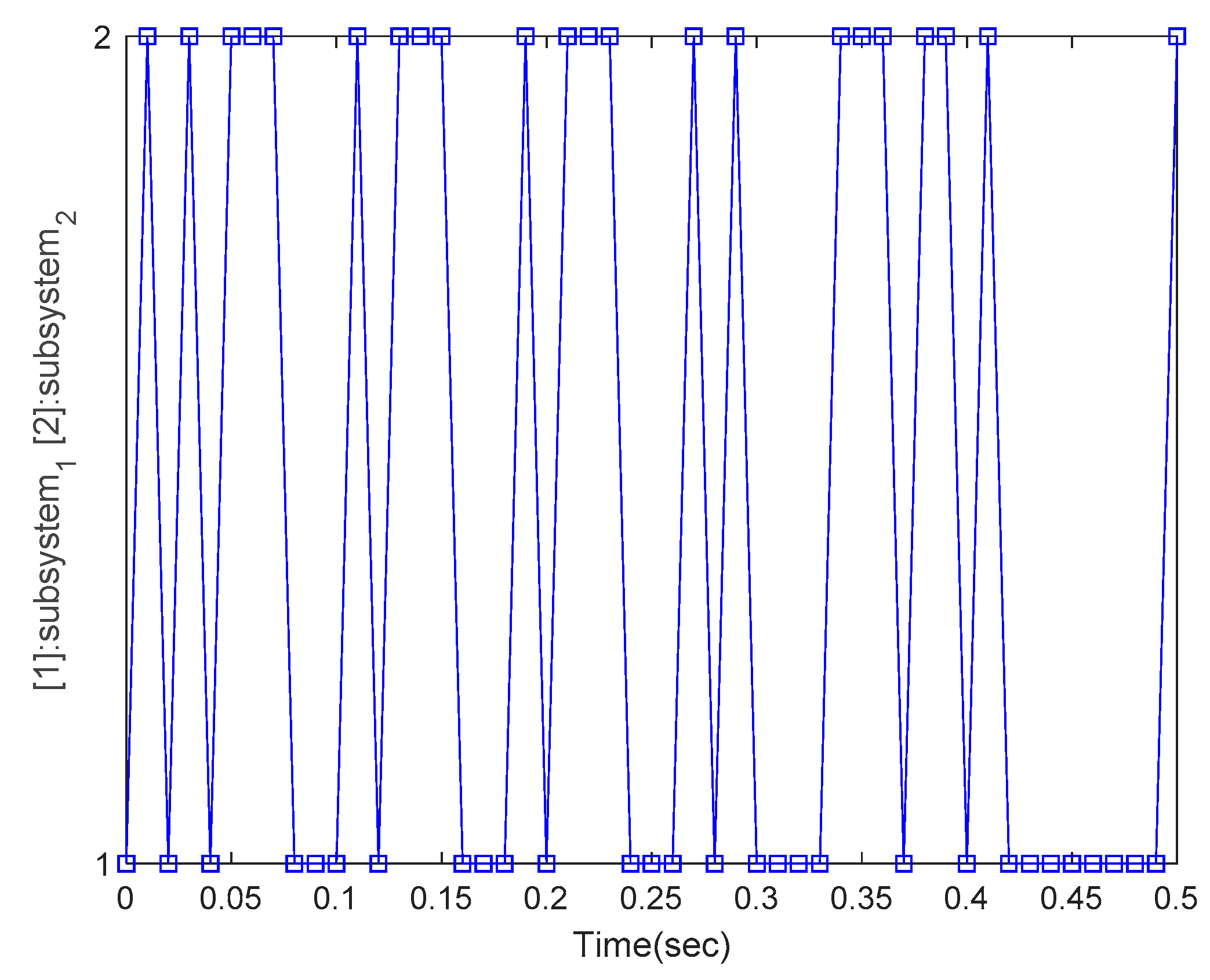
. The corresponding switching signal is shown in
Figure 3. The solid line is the state of switched singularly perturbed system (30) and the dotted line is the state of the individual system.



{kind=link}
{kind=link}
{kind=link}