Abstract
This paper introduces weak variants of level convergence (L-convergence) and epigraph convergence (E-convergence) for nets of level functions on general topological spaces, extending the classical metric and real-valued frameworks to ordered codomains and generalized minima. We show that L-convergence implies E-convergence and that the two notions coincide when the limit function is level-continuous, mirroring the relationship between strong and weak variational convergence. In Hausdorff topological groups, we define robust level functions and prove that every level function can be approximated by robust ones via convolution-type operations, enabling perturbation-resilient modeling. These results both generalize and connect to -convergence: they recover the classical metric, lower semicontinuous case, and extend the scope for optimization on Lie groups, fuzzy systems, and mechanics in non-Euclidean spaces. An explicit nonmetrizable example demonstrates the relevance of our theory beyond the reach of -convergence.
MSC:
54A20; 26E25; 54H11
1. Introduction
The study of the level convergence and epigraph convergence of functions, together with their applications, has been extensively developed. In particular, Román-Flores [1] (and references therein) treats the convergence of fuzzy sets in finite-dimensional spaces, the level convergence of functions on regular topological spaces, and the compactness of spaces of fuzzy sets in metric settings. Fang et al. [2] investigate the level convergence of fuzzy numbers; Greco et al. [3,4] explore the variational convergence of fuzzy sets and characterize relatively compact families of fuzzy sets in metric spaces; and Attouch [5] studies these notions within the calculus of variations.
The principal tools in this line of work are based on Kuratowski limits and their links to fundamental variational properties. A key feature of epi-convergence is the stability of minimizers (and maximizers) along epi-convergent sequences of functions. This stability largely explains the effectiveness of these convergence schemes in global optimization; see [5]. Within this framework, Zheng [6,7] introduced the notion of robust functions, which generalizes upper semicontinuous functions. For robust functions, global minimization over compact sets admits an integral representation, which in turn yields a constructive algorithm for solving the problem.
The aim of this paper is twofold. First, we introduce weak versions of level convergence and epi-convergence on general topological spaces and analyze their properties. The key distinction is the use of a generalized notion of minimum that captures the behavior of a function on a neighborhood of a point rather than only at the point itself. Second, we investigate robust functions on topological groups. This setting affords substantial generality, and by introducing a convolution operation on level functions, we show that any level function can be approximated—indeed obtained as a limit—by robust level functions, a result with significant implications for optimization problems.
The results of this paper provide a rigorous framework for the convergence and robustness of level functions, with direct implications across several applied areas. Because L-convergence is stronger than E-convergence, it preserves the geometry of level sets—a property that is crucial for Lyapunov-based stability analysis in control [8] and for contour-evolution methods in image segmentation [9]. By contrast, E-convergence focuses on epigraph stability and thereby underpins well-posedness guarantees for convex and variational problems [10]. Moreover, our approximation theorems show that on Hausdorff topological groups, any level function can be realized as a limit (in the sense introduced here) of robust level functions. This enables perturbation-resilient modeling in mechanics on Lie groups [11], robust optimization [12], and fuzzy systems [13]. Taken together, these connections between abstract convergence theory and practical robustness ensure that the tools developed here can be systematically applied to numerical simulation, stability analysis, and modeling under uncertainty.
The relationship between -convergence and our framework is as follows. -convergence is a cornerstone of variational analysis, ensuring the stability of minimizers and minimum values; for proper lower semicontinuous extended real-valued functionals on metric spaces, it coincides with epi-convergence. We introduce weak versions of level convergence (L-convergence) and epi-convergence (E-convergence) for nets of level functions on general topological spaces, extending the classical setting to ordered codomains beyond and to generalized minima that encode local behavior near a point.
We show that -convergence implies E-convergence and that the two notions are equivalent when the limit function is level-continuous, paralleling the classical relationship between strong and weak convergence. On Hausdorff topological groups, we define robust level functions and prove that every level function is an L-limit (and hence an E-limit) of robust ones, mirroring the stability and approximation properties of -convergence. Moreover, convolution-type operations enable perturbation-resilient approximations.
Our framework recovers classical G-convergence when specialized to metric spaces and lower semicontinuous real-valued functionals while offering broader applicability to optimization on Lie groups, fuzzy systems, and mechanics in non-Euclidean settings. We also present an example that demonstrates the relevance of our approach beyond classical G-convergence.
This paper is organized as follows. Section 2 reviews the background—limits of sets, level functions, epigraphs, and Kuratowski limits—and recalls their role in variational analysis and optimization. Section 3 introduces weak versions of level convergence and epi-convergence on general topological spaces, establishes their basic properties, and shows that they coincide when the limit function is level-continuous. Section 4 develops the theory of robust level functions on Hausdorff topological groups and proves—via convolution-type operations—that any level function is a limit of robust ones. Section 5 situates our framework within -convergence, recovering classical results in metric settings while demonstrating broader applicability. We conclude with an illustrative example that applies in situations where -convergence does not.
2. Preliminaries
In this section, we introduce the basic concepts used throughout the paper and establish several foundational properties of level functions. For standard definitions and additional background, see, e.g., Refs. [3,10,14] and the references therein.
2.1. Convergence of Sequence of Subsets
This section is concerned with the convergence of the nets of subspaces of a given topological spaces. For more on the subject, the reader could consult ([15] Chapter 3).
Let be a topological space and a net in X. Let be the set of neighborhoods of x.
For metric spaces X and Y, a function is continuous if and only if for any
The same does not hold in general topological spaces: sequences need not capture all limit phenomena. The notion of a net, introduced by E. H. Moore and H. L. Smith [14], generalizes sequences and resolves this issue.
Before defining a net, we require the following notion. A nonempty set with a reflexive and transitive binary relation ≤ is a direct set if given any there exists with and . A subset is said to be cofinal if for any there exists such that .
Definition 1.
Let X be a topological space and Λ a directed set. Any function is a net. We usually identify f with its image , where .
A point is a limit point of if for every there exists such that for all . Also, we say that x is a cluster point of if for every and every there is such that and .
Definition 2.
Let be a net of subsets of X.
- 1.
- A point is a limit point of if for every there exists such that for all ;
- 2.
- A point is a cluster point of if for every and every there exists with and ;
- 3.
- is the set of all limit points of ;
- 4.
- is the set of all cluster points of ;
- 5.
- If , we say that the net converges to A and write
As in [15] (Propositions 3.2.11 and 3.2.12), it holds that
where is a cofinal set in . In particular, and are closed subsets of X, and it holds that .
Definition 3.
We say that a net is monotone increasing (resp. decreasing) if
The next result assures that for monotone nets, the limit exists.
Proposition 1.
Let be a net of subsets of X.
- (i)
- If is monotone increasing, then ;
- (ii)
- If is monotone decreasing, then .
Proof.
Since the proof of both cases are similar, let us only show the monotone decreasing case. In this situation, it holds that
On the other hand,
for any cofinal set of . Hence,
which implies the result. □
Let be a net of real numbers with . In the sequel, we use the notation (resp. ) when the net converges to and is monotonic crecent (resp. decrescent) and there is no repetition of elements.
2.2. Level Functions
Let X be a topological space and consider a function.
Definition 4.
For any given , the α-level sets of f reads as
We consider the set of level functions given by
The next proposition characterizes the level sets of a function by means of limits.
Proposition 2.
For any and any , it holds that
Proof.
Since the inclusions
follows directly from the definition of level sets, we will only show the equalities.
Let then and a net . There exists such that . Hence,
and so implying that and showing that . Therefore,
Reciprocally, let and consider a net . By definition,
Therefore, , which implies implying that and so .
Let us now consider . By definition, there exists a net and with In particular, for any , there exists such that implying that
and, hence, .
Reciprocally, let and consider with and . The fact that shows that for all . In particular, there exists such that . By taking , and we obtain that . Therefore,
and, hence, is a net such that . It follows that and concluding the proof. □
Example 1.
Let and consider its characteristic function, that is,
Then, and, hence,
Definition 5.
For any , the epigraphs of f reads as
The next result relates the topological properties of epigraphs and level sets
Proposition 3.
With the previous notations, the following holds:
- 1.
- ;
- 2.
- .
Proof.
1. Let . Then, for any and , it holds that In particular, by considering , we obtain that , and, by Proposition 2, we obtain that
On the other hand, let and consider . By Proposition 2, it holds that for all . Therefore, by considering such that and , we obtain
2. Let and consider . Then,
Also,
On the other hand, the set
Moreover,
implying that
□
2.3. Generalized Minimum and Level Continuity
In this section, we introduce the notion of minimum values for a level function, which plays a fundamental role in our convergence analysis.
Definition 6.
A point is an α-generalized local minimum of a given function if
If, in addition, , we say that x is an α-local minimum of f. We denote by the set of the α-generalized minimum of f and by the set of the generalized minimum of f.
Remark 1.
It is important to emphasize that a generalized minimum provides information about the behavior of the graph of f in a neighborhood, whereas a (classical) conveys information about the value . A function may admit generalized minima without possessing actual minima, as the following example illustrates.
Example 2.
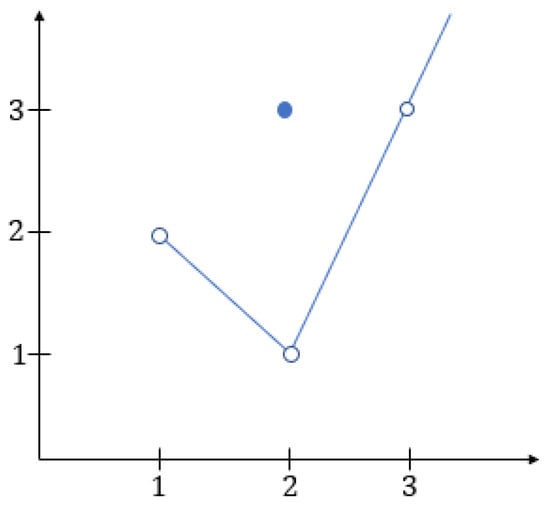
Consider
A simple calculation shows that
implying that
Since for , then necessarily . Note also that f has no minimum (see Figure 1).
Figure 1.
Function with generalized minimum and without minimum.
Next, we define a weak level continuity of a level function.
Definition 7.
For any , a function is said to be weak α-level-continuous if . We say that f is weak level-continuous if it is weak α-level-continuous for all .
It is straightforward to see that is weak level-continuous if
3. Convergence by Level and by Epigraph
We introduce in this section the notions of level convergence and epigraph convergence and study the conditions that guarantee their equivalence.
Definition 8.
Let be a net. We say that weak converges by a level (L-converges) to a function (or simply ) if
Analogously, a net weak converges by an epigraph (E-converges) to a function (or simply ) when
We say that the function is an L-limit of the net if and an E-limit if .
The next example shows that a net can be E-convergent but not L-convergent.
Example 3.
Let be a measure space and its associated Banach space. Let with and consider a decreasing net such that . Define
where is the ball in centered at . Since
we have that
On the other hand, , showing that does not L-converge to F.
and so
Figure 2.
Net where E-converges but not L-converges.
Remark 2.
A simple calculation shows us that
implying that the functions in Example 3 are also lower semicontinuous.
The subsequent lemma relates the limits of epigraphs and level sets, a relation that will be essential in the proof of our main theorem.
Lemma 1.
For all , the following holds:
- 1.
- 2.
- 3.
- 4.
Proof.
Since the items 1. and 3. are analogous to 2. and 4., respectively, we will only show 1. and 4.
1. Let . By definition, there exists a subnet and with . Consequently,
4. Let and . For any ,
In particular, implies the existence of such that if and, hence,
showing that and finishing the proof. □
Now, we can state and prove our main result concerning the level and the epigraph convergence.
Theorem 1.
Let be a net and . Then,
Reciprocally, if f is level-continuous, then
Proof.
We have to show that
However, by Lemma 1,
and, hence,
By Propositions 2 and 3, we conclude that
thus .
Let us consider now . Then, and the assumption together with Lemma 1 imply
Therefore, , so and then .
Let us now assume that with f is level-continuous. By definition,
Let and . Since we are assuming that , we have by Lemma 1 and Proposition 3 that
Therefore, and, since we are assuming that f is level-continuous,
Consider now and define , then . Since we are assuming , we obtain from Lemma 1 that
Hence, for small enough, we obtain
On the other hand, we are assuming that f is level-continuous, in particular, and consequently
which implies that ending the proof. □
The next step is to define monotone increasing nets.
Definition 9.
We say that a net is monotone increasing if the net is monotone increasing.
The next lemma states the main properties of monotone increasing nets.
Lemma 2.
For any net , the following holds:
- 1.
- is monotone increasing if is monotone increasing for all .
- 2.
- If is monotone increasing, then, for all , the net is monotone decreasing.
Proof.
1. In this case,
Reciprocally, if , then
2. Let and . Then,
□
The next theorem shows that monotone increasing nets are E-convergent.
Theorem 2.
Any monotone increasing net has an E-limit in .
Proof.
By Lemma 2, we have that is a monotone-decreasing sequence. By the Monotone Converge Theorem for real sequences, we obtain that converges to . Moreover,
Also,
If for some then and hence
On the other hand, let . For any , there exists such that . Hence,
Hence, the net is contained in and , implying that
and concluding the proof. □
Remark 3.
An analogous definition can be given for monotone-decreasing nets. However, there is no guarantee that a monotone-decreasing net admits a limit in .
4. Robust Functions and Topological Groups
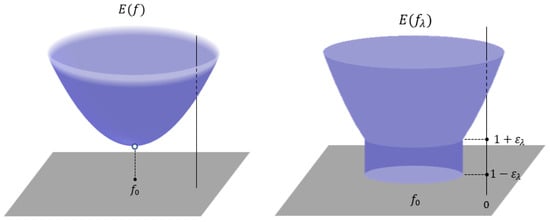
This section is devoted to the study of robust functions on topological groups. Such functions arise naturally in optimization problems, and a thorough understanding of them is, therefore, highly desirable (see, for instance, [6,7]). Our aim is to show that any level function on a topological group can be realized as the limit of robust functions with respect to both level convergence and epigraph convergence.
Definition 10.
A subset is said to be robust if .
We define the class of L-robust functions of as
and the class of E-robust functions of as
By Proposition 3, it holds that .
4.1. Topological Groups
Let G be a topological Hausdorff group. For any , the right translation by x is the map
It is a standard fact that is a homeomorphism of G with the inverse given by , where is the unique element in G such that , with the identity element.
For any given nonempty subsets , we define the set
Proposition 4.
Let A and B be two nonempty subsets of G. The following holds:
- 1.
- If A is open, then is open;
- 2.
- If , then ;
- 3.
- If A is robust, then is robust.
Proof.
The proofs of items 1 and 2 are straightforward. For item 3, we only have to show that since the opposite inclusion always holds. Let then and consider a neighborhood U of x. By definition,
In particular, and, hence, is a neighborhood of a since translations are homeomorphisms. By the assumption that A is robust, we have that
and by item 2, we conclude that and, hence, concluding the proof. □
4.2. L-Robust Functions on Topological Groups
In this section, we show that on topological groups, any function in is the L-limit of some net .
Let . The L-convolution of f and g is the function given by
Lemma 3.
For all and , it holds that
- 1.
- ;
- 2.
- 3.
- If there exists such that is open for all , then
Proof.
1. Let . Then,
which proves that .
Reciprocally, if and , then
showing that and so .
2. It follows analogously from the inclusion .
3. By definition, for any , there exists such that
In particular, we obtain that
However, by hypothesis, for any and, hence,
Therefore,
which ends the proof. □
Next, we prove that all functions in are L-limits of robust functions.
Theorem 3.
For any , there exists a net such that
Proof.
For any , let us consider the indicator function of U given by
For all , it holds that
However, by definition , which by Lemma 3 implies that , and, since , we obtain that By Proposition 4, it follows that
thus, we only have to show that L-converges to f, that is,
Let us first note that if , by definition, for all ; hence, we only have to show the previous relation for .
Consider . We have
If there exists a subnet such that , then
Therefore, we can assume w.l.o.g. that for all . In this case, the fact that for all implies by item 3 in Proposition 3 that
Therefore,
However, implies that and, hence, . Since we obtain that implying that
Consider now and a family such that . By choosing we have that and, by item 2 in Proposition 3 that
implying that and hence . □
4.3. E-Robust Functions on Topological Groups
In this section, we show that on topological groups, it is also true that any function in is the E-limit of some net .
Let us consider as a topological group, with the product given by
Let . The E-convolution of f and g is the function given by
Lemma 4.
For all and , it holds that
- 1.
- ;
- 2.
- 3.
- and are invariant for translations by elements in .
Proof.
1. Let . In particular, if is such that , there exists and such that
Then, and are such that
and
Reciprocally, if and , then and give us
implying that and, hence,
2. The inclusion is analogous to the inclusion . Consider then . By definition, for any , there exists such that
By defining and , we obtain that
furthermore,
implying that
which finishes the proof. □
The next result shows that any function in is the E-limit of a net in .
Theorem 4.
For any , there exists a net such that
Proof.
For any , let us consider indicator function of U given by
Then, and, hence, . Moreover, by Lemma 4, it holds that
and so Proposition 4 assures that is open and, in particular, robust. We claim that , or equivalently,
Let us consider . By definition,
Moreover, from Lemma 4, it holds that ; we can assume w.l.o.g. that
so we can write
However,
On the other hand, the fact that implies, in particular, that both and are bounded nets in . By taking subnets if necessary, we are able to assume w.l.o.g. that , implying that
Again, the fact that right translations are homeomorphisms in implies that
and, hence, .
Let us now consider and a family of neighborhood such that . By considering and choosing such that , we have that
On the other hand,
showing that and, hence, that , which implies necessarily that . □
5. Compact Non-Metrizable Topological Group Example
Consider the compact, Abelian, and Hausdorff topological group
that is, the Tychonoff product of circles endowed with the product topology, where I is an uncountable index set. It follows that K is not metrizable since the product over an uncountable index set is not first countable [16]; see also [17]. For , let denote the geodesic distance on to the identity. For a net of finite sets increasing to I, we define the level functions
The sublevel sets increase (in the product topology) to , so L-converges to f in our sense, and E-converges as well when f is level-continuous. Because K is non-metrizable, the sequential methods underlying classical epi- and -convergence are not applicable, whereas our net-based weak L/E framework naturally captures the limit. Furthermore, by compactness, K admits a normalized Haar probability measure, so convolution on K yields robust level functions approximating f, thereby preserving stability properties relevant to optimization in this setting.
Future Works
Building on the rigorous framework developed in this paper for analyzing the convergence and robustness of level functions, several promising research directions arise. First, the stronger nature of L-convergence—which preserves the structure of level sets—warrants further exploration in connection with Lyapunov-based stability criteria for nonlinear control systems, particularly in high-dimensional and infinite-dimensional contexts. Such investigations could strengthen stability guarantees in distributed parameter systems and networked control. Second, the role of E-convergence in ensuring epigraph stability points to extensions in the analysis of convex and variational problems under weaker regularity assumptions, with potential applications in large-scale optimization and nonsmooth mechanics. Third, the approximation results for robust functions on Hausdorff topological groups pave the way for perturbation-resilient modeling in geometric mechanics on Lie groups, including the development of structure-preserving and stability-preserving numerical integration algorithms. Finally, the connection between abstract convergence theory and practical robustness highlights the need for computational frameworks that incorporate these convergence notions into simulation tools for robust optimization, image analysis, and fuzzy system modeling, thereby enabling a systematic treatment of uncertainty across diverse applied domains.
Author Contributions
Conceptualization, V.A., H.R.-F. and A.D.S.; Methodology, V.A., H.R.-F. and A.D.S.; Investigation, V.A., H.R.-F. and A.D.S.; Writing—original draft, A.D.S..All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Fapesp grant number 2018/10696-6.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Román-Flores, H. The compactness of E(X). Appl. Math. Lett. 1998, 11, 13–17. [Google Scholar] [CrossRef][Green Version]
- Fang, J.; Huang, H. On the level-convergence of a sequence of fuzzy numbers. Fuzzy Sets Syst. 2004, 147, 417–435. [Google Scholar] [CrossRef]
- Greco, G.; Moshen, M.; Quelho, E. On the variational convergence of fuzzy sets. Ann. Univ. Ferrara (Sez. VII-Sci. Math.) 1998, 44, 27–39. [Google Scholar] [CrossRef]
- Greco, G. Sendograph metric and relatively compact sets of fuzzy sets. Fuzzy Sets Syst. 2006, 157, 286–291. [Google Scholar] [CrossRef]
- Attouch, H. Variational Convergence for Functions and Operators; Pitman: London, UK, 1984. [Google Scholar]
- Zheng, Q. Robust analysis and global minimization of a class of discontinuous functions (I). Acta Math. Appl. Sin. (Engl. Ser.) 1990, 6, 205–223. [Google Scholar] [CrossRef]
- Zheng, Q. Discontinuity and measurability of robust functions in the integral global optimization. Comput. Math. Appl. 1993, 25, 79–88. [Google Scholar] [CrossRef][Green Version]
- Hassan, K.K. Nonlinear Systems; Prentice Hall: Saddle River, NJ, USA, 2002. [Google Scholar]
- Osher, S.; Fedkiw, R. Level Set Methods and Dynamic Implicit Surfaces; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Rockafellar, R.T.; Wets, R.J.B. Variational Analysis; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]
- Rockafellar, R.T.; Wets, R.J.B. Introduction to Mechanics and Symmetry; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Aharon, B.-T.; Arkadi, N. Robust Optimization; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Lotfi, A.Z. Information and Control; Princeton University Press: Princeton, NJ, USA, 1965; Volume 8, pp. 338–353. [Google Scholar]
- Moore, E.H.; Smith, H.L. General Theory of Limits. Am. J. Math. 1922, 44, 102–121. [Google Scholar] [CrossRef]
- Klein, E.; Thompson, A.C. Theory of Correspondences; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Ryszard, E. Topological Transformation Groups; Heldermann Verlag: Lemgo, Germany, 1989. [Google Scholar]
- Deane, M.; Leo, Z. General Topology; Dove: London, UK, 2018. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).