Abstract
In this manuscript, we study the coverage of convex spherical domains by spherical circles. This question can be applied to the location of satellites, weather balloons, radio towers, etc. We present an upper bound on the number of spherical circles of radius r needed to cover a spherical convex domain K, in terms of the respective area and perimeter. Then, we calculate the asymptotic density of such cover, when the radius approaches zero.
MSC:
52C15; 05B40
1. Introduction
The large-scale structure of Earth follows a spherical geometry. Usually, it can be approximated by a planar (Euclidean) geometry. However, when considering large-scale regions on Earth, it is necessary to take into account the spherical structure. For instance, when considering a region’s coverage by satellites, weather balloons, radio towers, etc., we need to take into account the fact that the broadcast range is not a planar circle but rather a spherical circle. Therefore, it is necessary to devise methods/algorithms for the coverage of a region. In this paper, we present a method for the determination of coverage using spherical circles and present bounds on the number of circles needed for coverage.
Covering a domain in a plane with congruent circles is a well-studied problem that spans various approaches, ranging from algorithmic methods [1,2] to analytical techniques [3,4,5]. Similarly, the problem of spherical coverage on using spherical discs was explored in [6], where it was shown that no point was covered more than times.
The study of sphere tilings, such as in [7], has also gained attention, along with investigations into the tiling of the sphere using distinct tiles, as discussed in [8]. Furthermore, ref. [9] provides an upper bound on the number of unit circles needed to cover a convex domain with area A and perimeter L, given by the formula
This result is derived using the probabilistic placement of the convex domain relative to the hexagonal lattice, leveraging the lattice’s optimal packing properties. The formula calculates the average number of fundamental hexagons intersecting the Minkowski sum of a regular hexagon (bounded by the unit circle) and the domain. In [10], several algorithms for the coverage of both convex and non-convex polygonal regions are presented, offering improvements to this formula. These algorithms operate with polynomial computational complexity and provide a constant-factor approximation for the optimal coverage. Notably, for “fat” convex regions, the approximation becomes asymptotically optimal.
Our purpose in this manuscript is to combine the ideas and approaches that appear in the manuscripts mentioned above in order to generalize the planar Formula (1) to , using the following procedure. First, we formulate parallel definitions and notions to . Second, we give a spherical analog of the kinematic formula mentioned in [11], using the area and perimeter of the spherical convex domain. Third, we construct a sequence of coverings of the sphere with congruent spherical circles by projecting polygonal tilings of the faces of a dodecahedron inscribed in the sphere to the sphere, thus achieving the tessellation of the sphere. Finally, we calculate the area and perimeter of a circle of each covering of the sequence and obtain a spherical analog to the planar Formula (1).
The transition from a planar to a spherical geometry introduces unique challenges. For instance, planar convexity is defined via straight lines, whereas spherical convexity relies on geodesic lines. Likewise, regular hexagons, which are optimal for plane tiling, cannot tessellate the sphere. Instead, a recursive tessellation approach is employed, dividing the faces of a dodecahedron into triangles and projecting these onto the sphere, resulting in spherical polygons bounded by circles.
Using this tessellation, we derive an upper bound for the number of spherical circles required to cover a convex subset of . By analyzing a sequence of such coverings with diminishing circle radii, we examine the asymptotic behavior of the bound. Our findings reveal notable differences from the planar case, even as the spherical circles approach “planarity”.
From Equation (1), it follows that the asymptotic efficiency of the coverage in the Euclidean plane using circles of a radius that tends to zero is ≈0.827. Our main result establishes that the efficiency of covering a convex spherical domain K, with area A and perimeter L, using our suggested method is ≈0.496.
2. Preliminaries
Definition 1.
The Minkowski sum of two sets is . For , the Minkowski dilation by factor s is defined to be .
Denote by the volume of the unit ball of dimension k; then,
where denotes the Gamma function. Denote by the surface area of ; then, .
Theorem 1
([12] p. 2, Theorems ). Given a convex domain , there exist functionals such that
Now, we give some definitions and theorems in spherical geometry.
Definition 2.
Let K is called convex if, for all the geodesic line between a and b is contained in K. We denote the set of all convex sets in with
One can show that a set is convex if it is the intersection of and a non-zero line-free closed convex cone in .
Our main result concerns the following definition.
Definition 3.
In the sphere , a set will be called a proper convex set if it is a convex set that is not part of a sphere of lower dimension and not the sphere itself.
It can be shown that a proper convex set is contained in a hemisphere.
Notation 1.
We denote the set of all spheres of dimension lower than n with .
With this notation, one can say that the set of proper convex sets is obtained by .
In Theorem 1, the volume of the parallel set (given a domain and a ball with radius r) has been defined. We describe a similar definition in .
Definition 4.
Given , let be a positive real number. Then, the parallel set of radius ε of A is defined by
where denotes the standard spherical distance.
We note that is the spherical equivalent of the Minkowski sum of A and a ball of radius
The theorem below will define the volume of the spherical parallel set with respect to the volume and area of the sphere.
Theorem 2
(Spherical Steiner Formula [12]). Let For , the standard spherical measure of (the surface area) is given by
where is the k-th sphere area, and .
The functionals are called the spherical intrinsic volumes. Since the functions are linearly independent, this expansion defines the coefficients uniquely. See [12] for proof details.
Theorem 3
([12] p. 2, Theorems ). Let be a convex body such that (smoothness). Then, for , the intrinsic volumes can be obtained using the following formula:
when is the k-th normalized elementary symmetric function of the principal curvatures of , and denotes the area element.
Notice that, in the spherical case, the Gauss–Bonnet theorem involves a sequence of intrinsic volumes.
Theorem 4.
Given a domain , where is the respective Euler characteristic number,
Specifically, if (convex), then
All these definitions and theorems are preparations for the kinematic formula, which is the building block for our results.
The Kinematic Formula
The following theorem states the probability that two convex bodies intersect in .
Theorem 5.
Let and let ν be the Haar measure on the rotation group of . The spherical kinematic formula states that
Specifically, for , we get
For more details, see [11].
Our main focus is . We describe the intrinsic volumes of a spherical convex set K with its area A and perimeter L.
Firstly, as mentioned before, the n-th intrinsic volume satisfies
Specifically, for , we get
where is the area of K.
Secondly, for , using the integral formula, we get
where is the perimeter of K (the length of ). Indeed, the formula requires smoothness— has to be regular and in ; however, since K is convex, can always be smoothed, with a negligible effect on the area and the perimeter, so, in fact, the formula can be used in our case.
Finally, for , from the Gauss–Bonnet theorem, we have
Therefore, we get
So, finally, we have the following.
Theorem 6
(Blaschke spherical formula). Let If the center of K is placed at the north pole, and the center M is placed randomly in with a random orientation (uniformly distributed), then
3. Sequence of Coverings and Upper Bounds
3.1. Defining Sequence of Coverings
Our approach is based on constructing a sequence of coverings of the sphere with spherical circles in which their respective radii tend to zero. In each of these, we apply Theorem 6 to achieve an upper bound for the number of spherical circles needed to cover a convex set . Our construction is obtained by the following steps.
Take a regular dodecahedron inscribed in the sphere. The length of every edge is ; denotes the golden ratio. Divide every face into 5 congruent isosceles triangles, with two angles and one angle. By drawing the lines between the midpoints of the edges, we divide each triangle into 4 congruent triangles, all similar to the divided triangle.
This process can be repeated iteratively, with the subdivision of increasingly smaller triangles with each step. Such division is called geodesic subdivision.
Using this approach, the sphere is tiled by the projections of the polygon (pentagons and hexagons). The set of projections of the polygons of the n-th subdivision will be denoted by .
Lemma 1.
The n-th division in the sequence contains triangles, which can be arranged into 12 pentagons and hexagons.
Proof.
The proof is trivial, since, in the first step, each pentagon can be divided into five isosceles triangles, each of which is tiled by four smaller isosceles triangles, where 60 triangles create 12 pentagons and the remaining create hexagons.
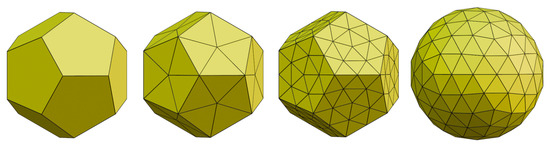
It should be noted that some of the hexagons lie on more than one face of the dodecahedron, as shown in Figure 1. □
Figure 1.
Creating the tiling . From left to right: a dodecahedron; dividing the facets into congruent triangles; dividing every triangle into 4 congruent triangles; projecting the dodecahedron onto the sphere. Figure by Matan Kichler.
It is found that the partition of the hexagons is not regular, and the measures are obtained by the following calculation.
Lemma 2.
Every hexagon and pentagon that is defined in the sequence is inscribed by a circle of radius .
Proof.
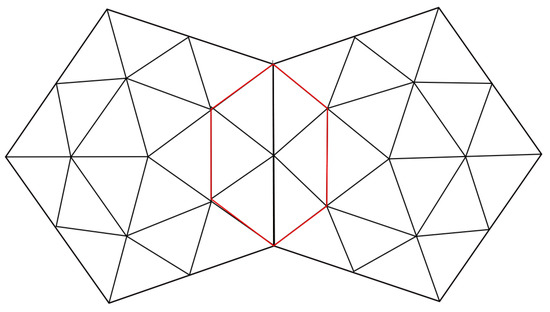
As in Figure 2, the base length of every triangle is . One can see that the length of the other edges of every triangle (by the law of sines) is Every hexagon has four angles of and two of . Therefore, when a hexagon lies in a facet, it can be inscribed in a circle of radius . □
Figure 2.
Given two faces that are divided into triangles, a hexagon composed of 6 adjacent triangles appears (shown in red).
Now, if P is the dodecahedron, then, using the projection , every point on the dodecahedron is projected onto the sphere. Thus, the n-th subdivision induces the tessellation of the sphere, with hexagons and 12 pentagons.
Remark 1.
Specifically, every triangle can be divided into congruent triangles. Such subdivision is called n-frequency geodesic subdivision; the Schläfli symbol of the matching geodesic polyhedron is In our sequence of subdivisions, we specifically look at the subdivisions of because, in these subdivisions, the triangles form hexagons (and 12 pentagons, as mentioned). For more details, see [13].
This projection onto the sphere changes the lengths of the edges of the hexagons (pentagons), and so the radius of the circumcircle of every hexagon (pentagon) changes as well. As the hexagon moves closer to the sphere, namely to a vertex of the dodecahedron, the change is smaller; on the other hand, when the hexagon is closer to the center of a face, the change is more significant. Thus, a spherical circle with a radius that is the projection of the radius of a circle centered at the center of a face (and of radius ) can inscribe every projected hexagon and every projected pentagon in . Thus, every projected polygon in can be inscribed by such a circle (with a radius respective to n), when the center of the circle is placed at the center of mass of the polygon. This construction leads to the coverage of the sphere by spherical circles. The set of spherical circles will be denoted as .
3.2. Calculating the Area of a Projected Circle
Given a circle inscribing a polygon in , the radius of such a circle according to Lemma 2 is . As mentioned earlier, when projected onto the sphere, the maximal change in the radius of the circle is achieved when the circle is placed in the center of a face. Thus, we wish to find the area of the spherical circle, with a radius that is the projection of the radius of a circle that is placed in the center of a face. In other words, we wish to calculate the length of the projection of a segment of length , placed in the center of a face (which is the radius of a circle in ); see Figure 3.
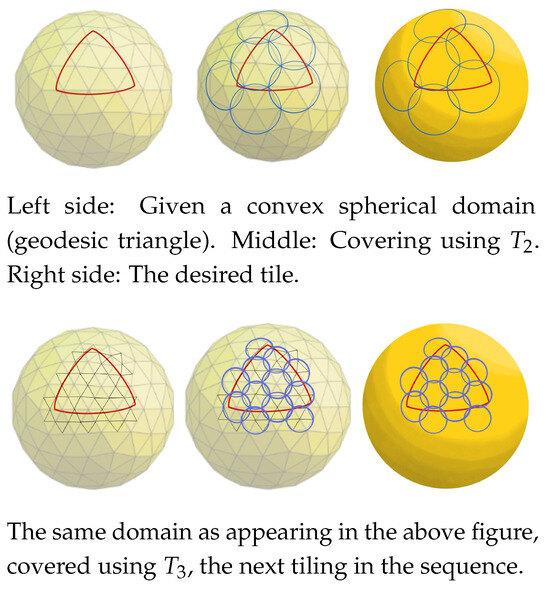
Figure 3.
Covering a spherical triangle with spherical circles using the tiling (up) and using the tiling (down), where each circle circumscribes a hexagon or a pentagon in the tiling.
Lemma 3.
The radius of a circle in is
Proof.
The dodecahedron can be placed in with its center placed in the origin and the vertices at
For instance, we look at the face with vertices
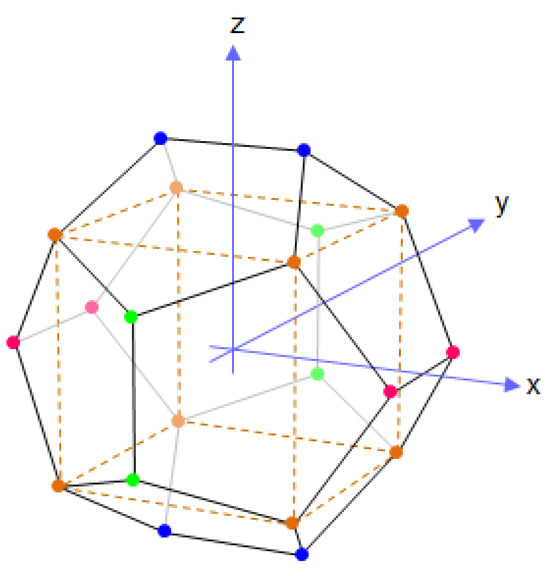
This is the face that faces the reader in Figure 4, with two orange vertices, two green vertices and a pink one.
Figure 4.
The dodecahedron in a Cartesian coordinate system. Taken from Wikipedia, by “Another Matt”.
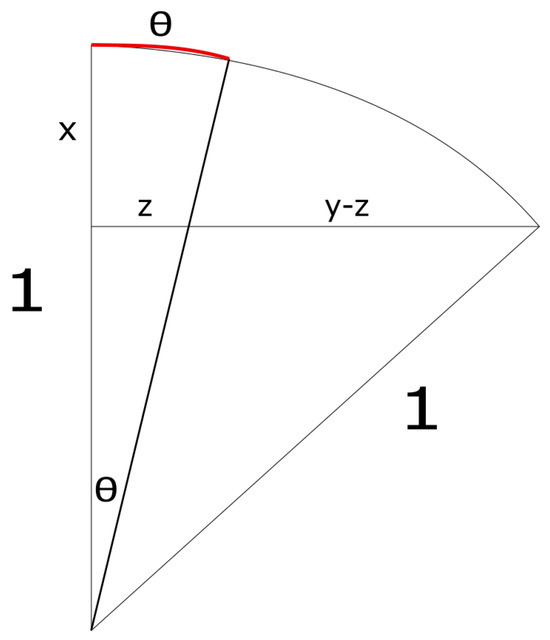
The coordinates of the center of the face are the means of the coordinates of the vertices, namely . The distance between the center and the sphere is , while the distance between the center and a vertex is . We note that . We wish to calculate the length of the red arc denoted by in Figure 5—the part of the arc that lies above the segment of length
Figure 5.
The long arc, shown in red.
In the right triangle with legs of lengths , the length of the hypotenuse is
So, we have
□
Thus, all polygons in , after projecting them onto the sphere, can be inscribed in a respective circle of radius .
The following theorem gives an upper bound to the number of circles of that is needed to cover the spherical convex set.
Theorem 7.
Let be a convex polygon with area A and perimeter L. K can be covered with
circles from the covering .
Proof.
We place K on the sphere with its center at the north pole, and we place the covering randomly on the sphere. The area of every circle is and its perimeter is . Using the Blaschke spherical formula, we have
The covering contains circles. Denoting the number of circles that intersects K with , the linearity of the expected value yields
Because this is the expected value, there is indeed a placing in which K is covered with at most circles from the covering . □
Remark 2.
Note that when and we have
Thus, the probability of a point (the “limit” of a circle with a radius that tends to 0) being in K is
Remark 3.
For any , we can achieve a bound on the number of spherical circles of radius r needed to cover K—there exists such that so the bound that we obtain for the coverage of using circles of radius will suffice.
4. The Covering Efficiency
In this section, we seek to calculate the ratio between the area A of K and the total area of the circles in covering K, i.e., circles, each one of area . We call this ratio the efficiency of the covering.
Theorem 8.
The efficiency of the covering is
Proof.
We can neglect the rounding in when so
Since the numerator is constant, it is enough to look at the denominator. when so Thus,
Now, , so when Moreover, and we get
We know that so then,
Finally, we have
□
In conclusion, more than half of the total area of the circles “goes to waste”.
5. Ratio Approximation
As discussed in Section 3.1, each tessellation is composed of different hexagons, each inscribed by a respective circle. We wish to explore the relation between the circumscribing circles of the maximal and minimal hexagons in a given , which will approximate the area wasted by the covering. In detail, the tessellation contains hexagons of different sizes (and twelve pentagons); we are interested in coverings with identical circles, and, as explained in Section 3.1, the covering contains the circumscribing circles of the maximal hexagon in , which are the projections of hexagons placed in the center of a face of the dodecahedron, while the smallest hexagons in are the projections of hexagons that are close to the vertices.
When we use a circle of to circumscribe a relatively small hexagon, a fairly large portion of the circle is wasted; the smaller the hexagon, the greater the wasted area of the circle.
A covering in which smaller circles are adapted for smaller hexagons—generally, circles with radii corresponding to the hexagon—can prevent some of this waste, but this would entail a covering using circles that are different from each other, which is beyond the scope of this work. However, we check the ratio between the area of the circles in the coverage and the area of a circle corresponding to a small hexagon when .
Now, we are ready to explore the ratio for . For this, we check the area of the circle that circumscribes a small hexagon. How does the length of a segment of length that starts at a vertex of the dodecahedron change when it is projected onto the sphere?
Lemma 4.
Denote the radius of the maximal circle by and the radius of the minimal circle by , and the respective areas are and . Then,
Proof.
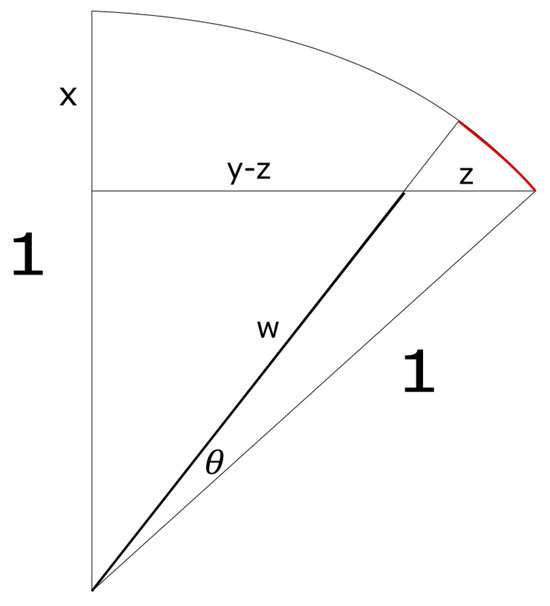
As already mentioned in Section 3.2, the distance between the center of a face and the sphere, denoted by x, is , while the distance from a vertex to the center of the face, denoted by y, is . Thus, we wish to calculate the length of the part of the arc above the segment whose length is from the segment whose length is y; see Figure 6.
Figure 6.
In red, the projection of a segment with length z placed in a vertex of the dodecahedron.
In a similar way, w can be calculated using the Pythagorean theorem
i.e., . This means that the length of the part of the arc can be calculated using the law of cosines:
So, the desired ratio is
Substituting the values and z leads to
Since we get Thus, So:
Again, , and we have
Now, , which leads to
□
In conclusion, the ratio between the area of a circle in the covering and the area of the circle circumscribing the smallest possible hexagon in the tessellation tends approximately to .
6. Summary and Future Work
The main result presented bounds the number of spherical circles needed to cover a convex spherical region. The strategy that we use is to bound the projection of each tile in the dodecahedron by a spherical circle.
We then give an asymptotic bound based on the sequence of tilings with an exponentially decreasing tile size.
We know that the result for the coverage of small regions is suboptimal since the bound is based on the maximum magnification imposed by the projection. An optimized approach may consist of using only a small region of the tiling, which would allow a more homogeneous magnification bound and thus a more optimized covering.
Author Contributions
All authors, E.A., R.C. and S.G., have equal contributions. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Acknowledgments
We thank Matan Kichler for producing Figure 1.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Friederich, R.; Ghosh, A.; Graham, M.; Hicks, B.; Shevchenko, R. Experiments with unit disk cover algorithms for covering massive pointsets. Comput. Geom. 2023, 109, 101925. [Google Scholar] [CrossRef]
- Ghosh, A.; Hicks, B.; Shevchenko, R. Unit disk cover for massive point sets. In Proceedings of the International Symposium on Experimental Algorithms, Kalamata, Greece, 24–29 June 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 142–157. [Google Scholar]
- Gul, S.; Cohen, R. Efficient Covering of Thin Convex Domains Using Congruent Discs. Mathematics 2021, 9, 3056. [Google Scholar] [CrossRef]
- Heppes, A. Covering a planar domain with sets of small diameter. Period. Math. Hung. 2006, 53, 157–168. [Google Scholar] [CrossRef]
- Melissen, J.; Schuur, P. Covering a rectangle with six and seven circles. Discret. Appl. Math. 2000, 99, 149–156. [Google Scholar] [CrossRef]
- Böröczky, K.; Wintsche, G. Covering the Sphere by Equal Spherical Balls . In Discrete and Computational Geometry: The Goodman-Pollack Festschrift; Aronov, B., Basu, S., Pach, J., Sharir, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; pp. 235–251. [Google Scholar] [CrossRef]
- Engel, P.; Smillie, P. The number of convex tilings of the sphere by triangles, squares, or hexagons. Geom. Topol. 2018, 22, 2839–2864. [Google Scholar] [CrossRef]
- Luk, H.P. Dihedral Tilings of the Sphere by Regular Polygons and Quadrilaterals I: Squares and Rhombi. arXiv 2024, arXiv:2403.05941. [Google Scholar] [CrossRef]
- Santaló, L.A. Integral Geometry and Geometric Probability; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Gul, S.; Cohen, R.; Haber, S. Efficient covering of convex domains by congruent discs. arXiv 2021, arXiv:2108.00707. [Google Scholar] [CrossRef]
- Schneider, R.; Weil, W. Stochastic and Integral Geometry; Springer: Berlin/Heidelberg, Germany, 2008; Volume 1. [Google Scholar]
- Gao, F.; Hug, D.; Schneider, R. Intrinsic volumes and polar sets in spherical space. Math. Notae 2003, 41, 1–18. [Google Scholar]
- Coxeter, H.S.M. Regular Polytopes, 3rd ed.; Dover: Mineola, NY, USA, 1973. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).