Abstract
In this study, We explore for Minkowski 3-space harmonic surfaces’ geometric features by employing a common tangent vector field along a curve situated on the surface. Our analysis is grounded in the rotation minimizing (RM) Darboux frame, which offers a robust alternative to the classical Frenet frame particularly valuable in the Lorentzian setting, where singularities frequently arise. The RM Darboux frame, tailored to curves lying on surfaces, enables the expression of fundamental invariants such as geodesic curvature, normal curvature, and geodesic torsion. We derive specific conditions that characterize harmonic surfaces based on these invariants. We also clarify the connection between the components of the RM Darboux frame and thesurface’s mean curvature vector. This formulation provides fresh perspectives on the classification and intrinsic structure of harmonic surfaces within Minkowski geometry. To support our findings, we present several illustrative examples that demonstrate the applicability and strength of the RM Darboux approach in Lorentzian differential geometry.
MSC:
53A05; 53A10; 70B99; 14H50
1. Introduction
Harmonic surfaces, as critical points of the energy functional for smooth maps between manifolds, generalize the classical notion of minimal surfaces and occupy an important place in differential geometry and mathematical physics. In the Lorentzian context, particularly within Minkowski 3-space , the study of harmonic surfaces reveals intriguing differences compared to their Riemannian counterparts. Minkowski 3-space is a pseudo-Euclidean space characterized by the metric signature , allowing the classification of vectors and surfaces as spacelike, timelike, or lightlike depending on the sign of their inner products. This structure makes it a natural model for flat spacetime in the theory of special relativity and provides a rich setting for exploring geometric phenomena distinct from Euclidean spaces [1,2,3,4].
Harmonic maps between Lorentzian manifolds generalize the classical action principles in field theory. Surfaces satisfying harmonic conditions minimize certain energy functionals and correspond to stationary solutions of physical models, such as scalar field theories and sigma models. In particular, Dirac–Born–Infeld (DBI) models from string theory reduce, in certain limits, to problems involving harmonic surfaces [5]. This geometric formulation also underpins models in membrane theory, where surfaces of zero mean curvature represent static configurations of higher-dimensional analogues of strings.
In general relativity, spacelike surfaces with vanishing mean curvature often referred to as maximal surfaces serve as crucial tools for understanding initial value formulations of Einstein’s equations. These surfaces can represent instantaneous “snapshots” of spacetime and are essential for defining Cauchy surfaces, which are required for constructing globally hyperbolic spacetimes. Furthermore, timelike minimal surfaces are used to model world-sheets of one-dimensional objects (like strings or cosmic strings). They satisfy harmonic conditions and often emerge from variational principles that minimize the functional area in Lorentzian manifolds [6].
A fascinating application of harmonic surfaces lies in the study of Hasimoto-type surfaces, which are linked to the Hasimoto transformation, which maps vortex filament dynamics to the nonlinear Schrödinger (NLS) equation. Recent research has extended this correspondence to Minkowski 3-space, introducing the notion of quasi-Hasimoto surfaces, which model wave phenomena in relativistic settings [7]. This bridge allows physicists to understand soliton propagation, fluid flow, and even quantum wave packets within the framework of differential geometry.
To look at Minkowski space’s surface geometry, moving frames along curves play a fundamental role. Although the classical Frenet frame offers an efficient description of a curve’s behavior, it may encounter singularities when certain curvatures vanish. To overcome these limitations, Bishop introduced the concept of rotation Minimizing (RM) frames, which minimize the twist around the tangent vector and remain well behaved even in cases where the Frenet frame fails [8]. The RM frame has been successfully extended to Lorentzian settings, providing a stable framework for studying curves and surfaces in Minkowski space [9].
The Darboux frame, which naturally adapts to curves lying on surfaces by considering the surface’s normal vector, enriches the classical analysis by accounting for surface-induced curvatures and torsions. When combined with the RM frame concept, the so-called rotation minimizing Darboux (RM Darboux) frame emerges, offering significant advantages in the study of harmonic surfaces. This approach simplifies the relationship between the intrinsic and extrinsic properties of curves and the surfaces they trace, leading to new insights into the characterization of harmonic surfaces within the Euclidean and Minkowski 3-space [6,10,11,12,13,14,15,16].
In light of this, the current study attempts to create an extensive evaluation of harmonic surfaces through the use of RM Darboux frames in Minkowski 3-space, establishing conditions under which surfaces can be characterized as harmonic and illustrating the effectiveness of this geometric tool. Using the RM Darboux frame in Minkowski 3-space to examine the distinctive features of harmonic surfaces, one begins by adapting the classical moving frame approach to account for the Lorentzian metric structure. The RM Darboux frame is built on a surface along a curve and minimizes the rotational effect around the tangent direction while simultaneously incorporating the normal vector of the surface. This frame allows intrinsic and extrinsic curvatures, such as geodesic curvature, normal curvature, and geodesic torsion, to be expressed in a stable and geometrically meaningful way, even when the surface exhibits singular or degenerate behavior. By deriving relationships between the components of the RM Darboux frame and the mean curvature vector of the surface, it becomes feasible to establish adequate and essential criteria for the surface to be harmonic. Specifically, the harmonicity condition, often characterized by the disappearance of the tension field or the mean curvature vector, can be analyzed more effectively through the invariants associated with the RM Darboux frame. This method not only simplifies computations, but also offers deeper insights into the interaction between the geometry of curves and the harmonicity of the ambient surface in the pseudo-Euclidean setting of Minkowski 3-space.
A notable development in recent years is the introduction of rotation minimizing (RM) frames, particularly in applications where the traditional Frenet frame fails due to singularities or abrupt curvature changes. In Euclidean settings, the RM frame, also known as the Bishop frame, provides a smooth and stable alternative by minimizing the rotational twist of the normal vectors along the curve. This framework has been instrumental in characterizing special classes of curves and surfaces, including those of constant mean curvature or harmonic type. More recently, attention has turned to harmonic evolute surfaces, which generalize classical notions of surface evolutes by incorporating harmonic map conditions where the mean curvature vector satisfies the Laplace equation. In , researchers have investigated such surfaces using RM and Darboux-type frames, deriving characterizations in terms of geodesic curvature, normal curvature, and geodesic torsion. Their results demonstrate how the RM Darboux frame, tailored to the surface geometry, enables precise descriptions of surface behavior in local and global settings (see [17,18,19,20]. Building on this Euclidean groundwork, the present study explores these concepts within the Minkowski 3-space a Lorentzian manifold where geometric analysis is complicated by the indefinite metric and the presence of spacelike, timelike, and lightlike entities. In this study, we analyze harmonic evolute geometries derived from tubular surfaces using the RM Darboux frame, a tool that proves particularly effective in this context due to its adaptability to Lorentzian singularities. By employing a common tangent vector field along a spine curve lying on a surface, we formulate the RM Darboux frame in Minkowski space and use it to derive key invariants geodesic curvature, normal curvature, and geodesic torsion—that characterize the harmonicity of a surface. Moreover, we establish the relationship between these invariants and the surface’s mean curvature vector, yielding new insights into the intrinsic classification of harmonic surfaces in pseudo-Riemannian geometry. This paper contributes to a growing body of research that extends Euclidean differential geometric methods into relativistic settings. Our findings offer a unified framework for studying harmonic evolute surfaces and provide illustrative examples to demonstrate the versatility of the RM Darboux approach. Through this, we aim to bridge the gap between classical Euclidean geometry and its Lorentzian analogues, opening new pathways in the geometric analysis of surfaces.
2. Preliminaries
The three-dimensional real vector space known as the Minkowski 3-space, or , with a Lorentzian metric of signature . In , the metric is a bilinear form derived with the two vectors and by
A vector X can be categorized below depending upon the value of [11,21]
- X is called spacelike if or ,
- X is called timelike if ,
- X is called lightlike (or null) if and .
is a crucial model for studying differential geometry in relativity theory and related fields because of its Lorentzian structure, which produces geometric behaviors different from those of Euclidean space.
In Minkowski 3-space , let be a smooth spacelike curve with a timelike binormal that lies on a surface , where r is the arc-length parameter. The following characteristics of are present if is the moving Frenet frame of : [11,21,22]:
where , , and , and are the curvature functions of . The Darboux frame along is a moving orthonormal frame that describe the local geometry of the curve and the surface and has the following properties: [22,23]:
where V is the unit normal to , , and is the angle between V and P. Consequently, the following is the speculative expression for the Darboux frame of :
where and . Here,
We refer to as a geodesic torsion of , as a normal curvature, and as a geodesic curvature.
3. RM Darboux Frame in Minkowski 3-Space
Using the tangent vector as a common vector field around the curve, we provide a modified form of the traditional Darboux frame in this part, which we call the rotation minimizing Darboux (RM Darboux) frame. The related Darboux frame is given by Equation (3). Let be a regular spacelike curve with a timelike principal binormal vector, lying wholly on a surface in Minkowski 3-space . We denote the RM Darboux frame by , where the unit tangent vector to the curve is denoted by T. A simple calculation reveals that:
By differentiating (4) with respect to r and utilizing (3), we get
Also, the equalities (4) are derived by adding
Then, we get
In the same way as in the previous frames, the derivative subject to r yields the frame:
Assume in the preceding expression, which provides the PDF’s variation formula as follows:
Theorem 1.
Using the Darboux frame (3), let be a spacelike curve that lies entirely within a surface
where and are RM Darboux frame’s curvatures which are obtained by the relation:
yields the angle , and we also get the relation
Corollary 1.
Let be a spacelike curve via the RM Darboux frame (5) that lies entirely on k1 k2 γ(r)
Corollary 2.
Let be a spacelike curve via the RM Darboux frame (5) that lies entirely on a surface . k1 k2 γ(r)
Corollary 3.
Let be a spacelike curve lying fully on a timelike surface γ(r)
4. Modeling Tubular Surfaces Through the RM Darboux Frame
In Minkowski 3-space , let be a smooth spacelike curve with a timelike binormal resting on a surface . Next, the parametrization of the tubular surface using the RM Darboux frame is as follows [24,25,26]:
where ρ is a constant that denotes the sphere’s radius.
Theorem 2.
The Gaussian curvature of the tubular surface , which was built using the RM Darboux frame (5), is constant iff
for the constant c.
Proof.
The velocity vectors of along defined in (10) are given by
where . Therefore, the following are the main characteristics of the first fundamental form of :
On the other hand, the surface Ψ’s unit normal vector is provided by
The second-order partial derivatives of Ψ have the following manifestations
Expression (10) is used to find the values of the second fundamental form, as will be shown below.
The mean curvature and Gaussian curvature parameters are therefore computed as
Thus, is constant exactly when
□
Corollary 4.
The tubular surface defined via the RM Darboux frame (5), exhibits constant Mean curvature if and only if
for some constant c.
Corollary 5.
Minimality of the tubular surface the tubular surface constructed using the RM Darboux frame (5), holds if and only if the following equation is satisfied:
Corollary 6.
Let be a tubular surface constructed using the RM Darboux frame as defined in Equation (5). In this case, the ρ-parameter are not geodesics, whereas the υ-parameter curves are geodesics.
Proof.
Corollary 7.
Consider the tubular surface , which is built using the RM Darboux frame as specified in Equation (10). While the r-parameter curves are asymptotic if only if the following conditions are met, the υ-parameter curves are not.
Proof.
Corollary 8.
Consider the tubular surface defined via the RM Darboux frame in Equation (10). Then, the curves corresponding to the parameters r and υ are then principal curves.
Proof.
Corollary 9.
The surface of the tubular through the RM Darboux frame given by (10), is a -Weingarten surface
Proof.
If the Jacobi equation holds, demonstrating a functional relationship between the Gaussian curvature and the mean curvature , the surface is referred to as a Weingarten surface (see [22]). A tubular surface specified by Equation (10) is now Ψ. By applying the Equation (16), we arrive at:
It is clear that . □
Corollary 10.
The tubular surface via the RM Darboux frame defined by (10) is a -linear Weingarten surface iff
where the real values a, b, and c are not all zero.
Proof.
If the Gaussian curvature and mean curvature of a surface Ψ fulfill a linear relation of the type , where , then the surface is classified as a -linear Weingarten surface (see [22]). It then follows that:
where the real values a, b, and c are not all zero. □
5. Building a Tubular Surface Harmonically Using the RM Darboux Frame
We now use Equations (10), (13) and (16) to parametrize the harmonic surface related to . Thus, is defined as follows:
where . We express the velocity vectors of Ω as follows:
Therefore, the characteristics of the first fundamental form of Ω are as follows:
Meanwhile, the unit normal vector associated with Ω is determined by:
The second-order partial derivatives of Ω are computed as:
Using Equations (19) and (20), the coefficients of the second fundamental form are determined as follows:
The mean curvature and Gaussian curvature functions are therefore computed as
Theorem 3.
Corollary 11.
Proof.
Corollary 12.
Assume that the harmonic evolute surface is specified by formula (17) of the tubular surface (10) built with the RM Darboux frame in . Then, the features listed below are true.
- 1.
- The r-parameter curves of cannot be asymptotic curves.
- 2.
- The υ-parameter curves of are asymptotic curves if and only if η satisfies the partial differential equation
Proof.
If the normal curvature of a parameter curve on a surface disappears at every point, the curve is said to be asymptotic. Under such circumstances, we derive the following using Equations (19) and (21):
- , this indicates the curves with r-parameters are not asymptotic.
- If and only if . Then, , which indicates the curves with υ-parameters are asymptotic.
□
Example 1.
Let is the parameterized form of a spacelike curve γ. The Darboux frame of the curve and its curvatures , , and along are then determined by
Now, . The RM Darboux curvatures are therefore computed as:
Then the RM Darboux frame are given as
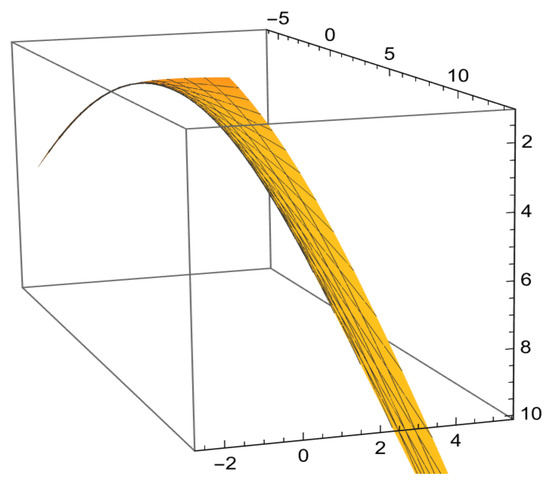
Consequently, the configuration of the tubular surface along the curve in the Darboux frame can be written as follows by using . (see Figure 1). Then, we have:
Figure 1.
Tubular surface via the Darboux frame.
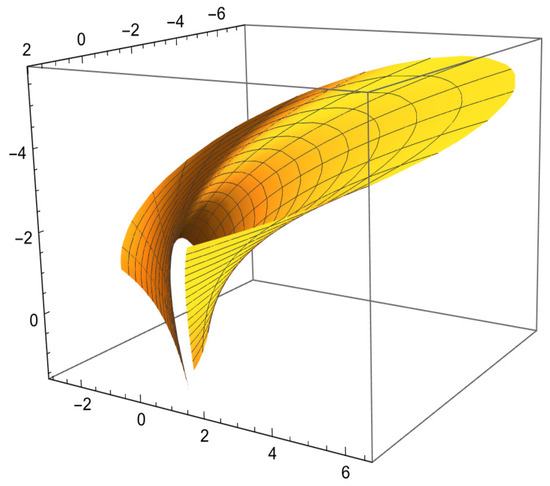
Using the Darboux frame, the harmonic surface of can be expressed as (see Figure 2)
Figure 2.
Harmonic surface via Darboux frame.
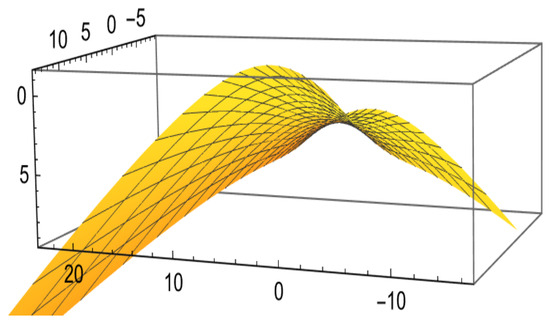
The tubular surface over the curve γ via RM is obtained from (10). The Darboux frame is shown in Figure 3.
Figure 3.
tubular surface via RM The Darboux frame.
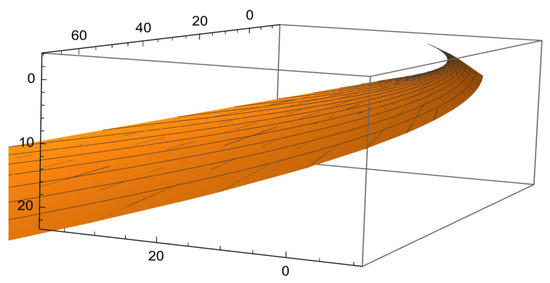
Figure 4.
RM Darboux frame of the harmonic surface .
6. Conclusions
In this study, we have used a rotation minimizing (RM) Darboux frame fitted to a shared tangent vector field along a surface curve to investigate the geometry of harmonic surfaces in the Minkowski 3-space . In Lorentzian circumstances, this method has been successful in overcoming the drawbacks of the classical Frenet frame, particularly in cases where standard frame formulations encounter singularities. By expressing key surface invariants namely geodesic curvature, normal curvature, and geodesic torsion within the RM Darboux framework, we have derived novel conditions that characterize harmonic surfaces in terms of their intrinsic and extrinsic geometry. Furthermore, we have clarified the connection between the mean curvature vector and the RM Darboux frame components, offering a deeper understanding of surface behavior in pseudo-Riemannian spaces. The illustrative examples included confirm the utility and versatility of this method, highlighting its relevance in the broader study of differential geometry in Minkowski space. Future work may extend this approach to other geometric structures or higher-dimensional Lorentzian manifolds.
Author Contributions
Data curation, E.S., S.S. and H.M.B.; Formal analysis, E.S., S.S. and H.M.B.; Funding acquisition, E.S.; Methodology, E.S., S.S. and H.M.B.; Software, E.S., S.S. and H.M.B.; Writing—original draft, E.S., S.S. and H.M.B.; Writing—review and editing, E.S., S.S. and H.M.B. All authors contributed equally. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported and funded by the Deanship of Scientific Research at Imam Mohammad Ibn Saud Islamic University (IMSIU) (grant number IMSIU-DDRSP-RP25).
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Drachal, K.; Mishra, V.N. Some algebro–geometric aspects of spacetime c–boundary. Math. Aeterna 2016, 6, 561–572. [Google Scholar]
- Laurian-Ioan, P.; Mishra, V.N. Projective flatness of a new class of g-metrics. Georgian Math. J. 2017, 26, 133–139. [Google Scholar] [CrossRef]
- Yoon, D.W. Timelike Minimal Surfaces and Harmonic Maps in Minkowski 3-Space. Bull. Korean Math. Soc. 2022, 59, 1649–1662. [Google Scholar]
- Solouma, E.; Al-Dayel, I.A.; Abdelkawy, M.A. Ruled surfaces and their geometric invariants via the orthogonal modified frame in Minkowski 3-space. Mathematics 2025, 13, 940. [Google Scholar] [CrossRef]
- Aminian, M.B.; Kashani, S.M. Lk-biharmonic Hypersurfaces in Space Forms. Acta Math. Vietnam. 2017, 42, 471–490. [Google Scholar] [CrossRef]
- Park, S.; Pyo, J. Chern-Ricci harmonic functions on zero mean curvature surfaces in the three-dimensional Lorentz-Minkowski space and the rigidity of Enneper’s surface. J. Math. Anal. Appl. 2022, 514, 126371. [Google Scholar] [CrossRef]
- Elsharkawy, A.; Cesarano, C.; Tawfiq, A.; Ismail, A.A. The non-linear Schrödinger equation associated with the soliton surfaces in Minkowski 3-space. AIMS Math. 2022, 7, 17879–17893. [Google Scholar] [CrossRef]
- Bishop, L.R. There is more than one way to frame a curve. Am. Math. Monthly 1975, 82, 246–251. [Google Scholar] [CrossRef]
- Özdemir, M.; Tosun, M. Rotation Minimizing Frames in Lorentz-Minkowski 3-Space. Commun. Fac. Sci. Univ. Ank. Ser. A1 Math. Stat. 2021, 70, 757–770. [Google Scholar]
- Sipus, Z.M.; Volenec, V. The harmonic evolute of a surface in Minkowski 3-space. Math. Commun. 2014, 19, 43–55. [Google Scholar]
- Lopez, R.; Sipus, Z.M.; Gajcic, L.P.; Protrka, I. Harmonic evolutes of B-scrolls with constant mean curvature in Lorentz-Minkowski space. Int. J. Geom. Methods Mod. Phys. 2019, 16, 1950076. [Google Scholar] [CrossRef]
- García, R.; Jiménez, J. On the use of rotation minimizing frames for curves in Lorentzian spaces. Mathematics 2020, 8, 1412. [Google Scholar]
- Körpinar, T.; Kaymanli, G.U. On the harmonic evolute of quasi normal surfaces. J. Sci. Arts 2010, 1, 55–64. [Google Scholar]
- Solouma, E.M.; Al-Dayel, I. Harmonic Evolute Surface of Tubular Surfaces via F-Darboux Frame in Euclidean 3-Space. Adv. Math. Phys. 2021, 2021, 7. [Google Scholar] [CrossRef]
- Ali, A.T.; Turgut, M. Rotation Minimizing Darboux Frame and Applications to Surfaces in Minkowski Space. Results Math. 2023, 78, 153. [Google Scholar]
- Saad, M.K. On the harmonic evolute of time-like Hasimoto surfaces in Lorentz–Minkowski space. Int. J. Geom. Methods Mod. Phys. 2023, 20, 2350206. [Google Scholar] [CrossRef]
- Gladkov, S.O. To the question of Gauss’s curvature in n-dimensional Euclidian space. J. Math. Res. 2020, 12, 93–99. [Google Scholar] [CrossRef]
- Bektaş, M.; Akyiğit, M. Harmonic maps and RM frames on curves in Lorentzian spaces. Adv. Geom. 2021, 21, 489–503. [Google Scholar]
- Özdemir, M.; Yaylı, Y. On RM frame and tubular surfaces in Euclidean and Minkowski space forms. Turk. J. Math. 2022, 46, 684–699. [Google Scholar]
- Chen, B.Y.; Li, S. Harmonicity and evolute surfaces using Darboux frame fields in E3. Differ. Geom. Its Appl. 2023, 89, 101874. [Google Scholar]
- O’Neill, B. Semi-Riemannian Geometry With Applications to Relativity; Academic Press: New York, NY, USA, 1983. [Google Scholar]
- Do Carmo, M.P. Differential Geometry of Curves and Surfaces; Revised and Updated Second Edition; Courier Dover Publications: Mineola, NY, USA, 2016. [Google Scholar]
- Savci, U.Z.; Yilmaz, S. The Darboux rotation axis & special curves according to rotation minimizing frame in Minkowski 3- Space. Prespacetime J. 2018, 9, 232–244. [Google Scholar]
- Hu, S.; Wang, Z.; Tang, X. Tubular surfaces of center curves on spacelike surfaces in Lorentz-Minkowski 3-space. Math. Methods Appl. Sci. 2019, 42, 3136–3166. [Google Scholar] [CrossRef]
- Hu, G.; Cao, H.; Wu, J.; Wei, G. Construction of developable surfaces using generalized C-Bézier bases with shape parameters. Comput. Appl. Math. 2020, 39, 157. [Google Scholar] [CrossRef]
- Qian, J.; Liu, J.; Fu, X.; Jung, S.D. Geometric characterizations of canal surfaces with Frenet center curves. AIMS Math. 2021, 6, 9476–9490. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).