Abstract
This paper investigates a class of multi-agent systems (MASs) governed by nonlinear fractional-order space-varying partial integro-differential equations (SVPIDEs), which incorporate both nonlinear state terms and integro terms. Firstly, a distributed adaptive control protocol is developed for leaderless fractional-order SVPIDE-based MASs, aiming to achieve consensus among all agents without a leader. Then, for leader-following fractional-order SVPIDE-based MASs, the protocol is extended to account for communication between the leader and follower agents, ensuring that the followers reach consensus with the leader. Finally, three examples are presented to illustrate the effectiveness of the proposed distributed adaptive control protocols.
Keywords:
multi-agent system; adaptive controller; partial integro-differential equations; consensus MSC:
93A30
1. Introduction
Multi-agent systems (MASs) allow agents to work together autonomously, synchronize their actions, and tackle complex challenges that would be too difficult or impossible for a single agent to manage independently [1,2]. The robustness and expandability of MASs make them indispensable in domains like robotics [3], traffic management [4], distributed computing, smart grid [5], smart energy systems [6], sensor networks [7], e-commerce [8], and remote health monitoring [9].
By now, most literature holds that MASs are usually modeled by ordinary differential equations [10,11,12]. With the rapid scientific and technological development, more agents with flexible materials are being introduced, such as flexible manipulators and flexible tubing [13]. Almost all behaviors depend not only on time but also on spatial factors [14,15,16]. Consequently, MASs, modeled by partial differential equations (PDEs) [17], or partial integro-differential equations (PIDEs) [18], are critical to solve these challenges.
Recently, several significant studies have focused on PDE-based MASs (PDEsMASs) [19]. Ferrari-Trecate et al. introduced functional analysis for the coordination of leaderless and leader–follower PDEsMASs using automatic control [20]. Qi et al. proposed an approach to track a target with a formation for PDEsMASs using a simple distributed control [21]. Meurer and Krstic investigated a distributed-parameter setting and a flatness-based approach for motion planning of PDEsMASs. Man et al. studied heterogeneous nonlinear PDEsMASs by using single-point and double-boundary control for finite-time deployment [22]. First-order linear hyperbolic PDEsMASs were developed by Wang and Huang for consensus via boundary control [23]. Wan et al. explored the output-feedback adaptive control of PDEsMASs with time delays [24]. Li and Liu proposed consensus tracking control of nonlinear PDEsMASs by using Hamilton’s principle to deal with flexible manipulators [25]. Compared to PDEs, PIDEs integrate both differential and integral operators, enabling them to capture phenomena with non-local interactions and memory effects [26]. PIDE-based multi-agent systems (PIDEsMASs) have attracted significant attention. Dai et al. proposed a proportional–spatial differential control method for time-delayed parabolic PIDEsMASs [18]. Gabriel studied cooperative output regulation of general heterodirectional hyperbolic PIDE–ODE-based MASs with disturbances [27]. These illustrated the good properties and results of MASs with spatio-temporal characterization.
Fractional-order systems display dynamics with non-integer orders, enabling more adaptable modeling of intricate behaviors relative to integer-order systems, and offering improved abilities by incorporating memory and historical effects [28]. Yan et al. proposed two boundary control approaches for fractional-order PDEsMASs under two different measurement forms [29], considered PDE-ODE models [30], and further studied observer-based boundary control [31]. Yang et al. proposed impulsive control protocols [32] and Zhao et al. studied boundary control for event-triggered consensus of fractional-order PDEsMASs [33]. These studies successfully addressed the consensus problem for fractional-order PDEsMASs. Space-varying PDEs are characterized by coefficients that differ across different regions in space, which occurs due to the properties of the medium, such as material density, thermal conductivity, or stiffness [34,35,36,37]. Such spatial variations introduce increasing complexity into the behavior and solutions of PDEs. The state of an agent may be influenced not only by time but also by spatial variations and past decisions, and these historical and spatial dependencies can be effectively modeled using integral terms and fractional-order techniques. However, consensus control of MASs governed by nonlinear fractional-order space-varying partial integro-differential equations (SVPIDEs) has not been solved, which is still a challenge.
This paper studies a class of semilinear fractional-order SVPIDE-based MASs, where the integro-term results from the product of two nonlinear functions. Initially, a distributed adaptive controller is developed for leaderless fractional-order SVPIDE-based MASs. For leader-following fractional-order SVPIDE-based MASs, a distributed adaptive controller is designed to further account for communication both among the following agents and between the leader and following agents. Using Lyapunov’s function and fractional-order inequalities, sufficient conditions for consensus of both leaderless and leader-following fractional-order SVPIDE-based MASs are derived.
2. Problem Formulation
One fractional-order SVPIDE-based MAS with spatio-temporal characteristics and semilinear terms is studied as
where stands for the state, represents the spatial and temporal variables, is the Caputo fractional-order derivative, , , and are nonlinear functions, is the input, , denotes known matrix functions, , and N represents the total number of agents.
Remark 1.
This paper focuses on the distributed adaptive consensus control of fractional-order SVPIDE-based MASs, considering both leaderless and leader-following scenarios. The proposed methods effectively account for the complex dynamics introduced by fractional-order terms and spatial variations in the system.
Remark 2.
More recently, only a limited number of significant studies have focused on researching fractional-order MASs modeled by PDEs [29,30,38,39]. Based on those results, this paper further researched the fractional-order MASs modeled by PIDEs.
Definition 1
([40]). The Caputo fractional-order derivative of concerning time t is expressed as
where .
Definition 2.
The leaderless fractional-order PIDEsMASs (2) reach consensus if
Assumption 1.
Suppose for any scalars and , there is a positive scalar γ satisfying
Lemma 1
([41]). Given a differential function , the following holds:
3. Consensus of Leaderless Fractional-Order SVPIDE-Based MASs
Letting the consensus error of leaderless fractional-order SVPIDE-based MASs be a distributed adaptive controller is studied as
where represents the control gain and is any real number. is defined such that when i is connected with j; otherwise, . Here, is a Laplacian matrix, where and when .
Remark 3.
Space-varying PIDEs have coefficients differing across different regions in space, introducing increasing complexity into the behaviors. This paper has managed to build a distributed adaptive control for the consensus of fractional-order SVPIDE-based MASs.
By applying the control protocol (6), the behavior of can be obtained
where
Theorem 1.
Proof.
Let the Lyapunov function be
Fractional-order differentiating yields
Using integration by parts, we obtain
Applying the triangle inequality [42],
where denotes the infimum of the corresponding function.
Since , one has
According to Assumption 1 and (12), one has
Using Wirtinger’s inequality [43] and the triangle inequality, one has
Using Assumption 1 and the triangle inequality, one has
and and .
Using the property of Laplace matrices,
where denotes the smallest non-zero eigenvalue of the Laplacian matrix.
Choosing it can be derived from (17) that , which implies as , and makes SVPIDE-based MASs reach consensus. □
Remark 4.
Unlike traditional methods [10,11,12], which primarily consider time-based dynamics, the proposed method accounts for both historical (past states) and spatial (space-varying) dependencies in the agents’ behavior. This is achieved through the use of fractional-order calculus and integral terms, which capture the memory and spatial variations that are often present in real-world systems. This makes the model more versatile and accurate for systems with complex temporal and spatial dynamics.
4. Consensus of the Leader-Following Fractional-Order SVPIDE-Based MASs
The dynamic for the i-th follower of the leader-following fractional-order SVPIDE-based MASs is expressed as
The dynamic of the leader is expressed as
The error of the leader-following fractional-order SVPIDE-based MASs is described as and a distributed adaptive controller is defined as
where if can obtain state information from , then ; otherwise, . is a positive definite symmetric matrix, in which and when .
By applying the controller (20), the behavior of yields
Theorem 2.
Proof.
Let the Lyapunov function be
Taking the derivative of yields
Using the property of Laplace matrices,
where
Similar to the proof of Theorem 1, one has
Choosing , where it can be derived from (25) that , which implies as , and makes the SVPIDE-based MASs reach consensus. □
Remark 5.
The states of the agents are not only influenced by time, but may also be related to space-varying factors and past states [29,30,31,32,33]. However, previous studies have not considered this aspect. Therefore, this paper investigates investigate fractional-order MASs based on SVPIDEs.
Remark 6.
Numerous studies on adaptive control for fractional-order MASs modeled by ODEs have achieved significant findings [44,45,46,47,48], while this paper addressed the adaptive control for PIDE-based MASs.
5. Numerical Simulation
Example 1.
To demonstrate the validity of Theorem 1, one nonlinear leaderless SVPIDE-based MAS with agents, random initial conditions and parameters is considered as follows:
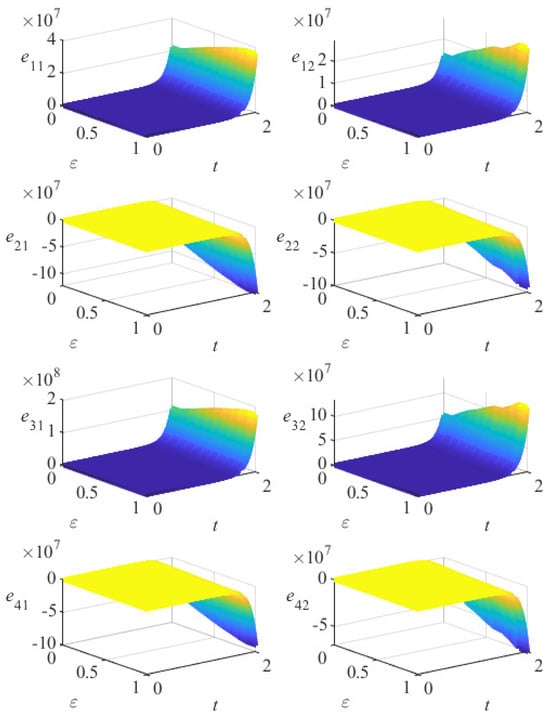
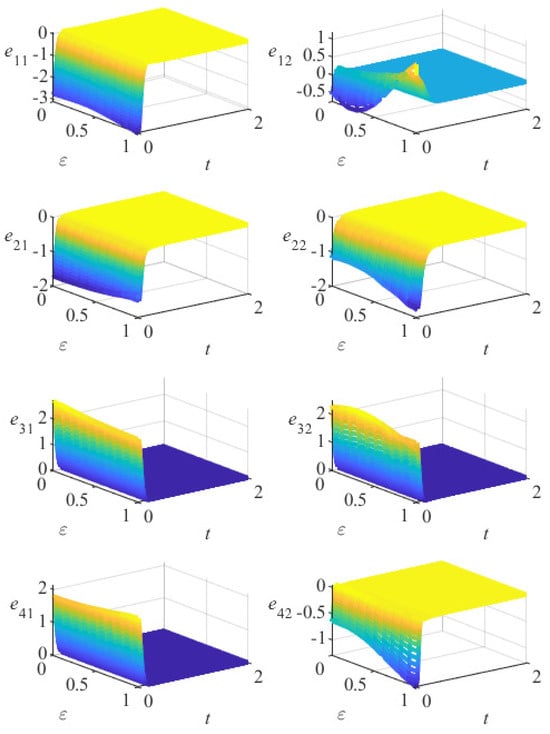
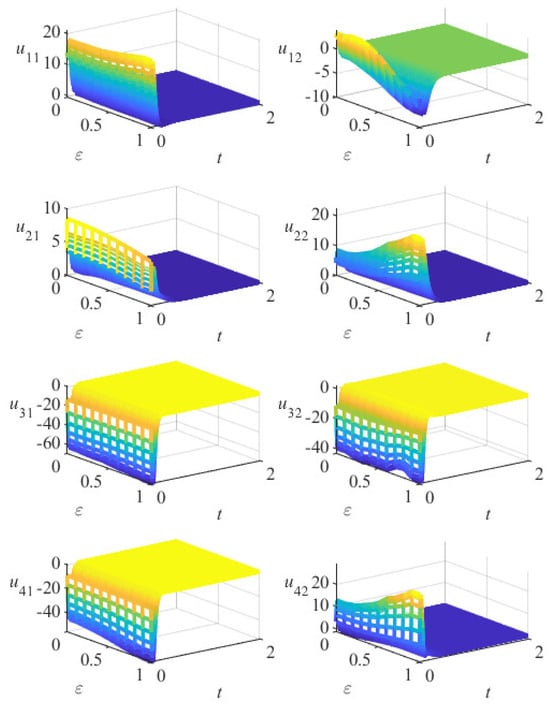
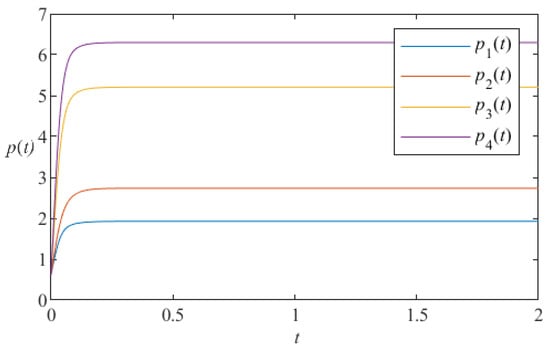
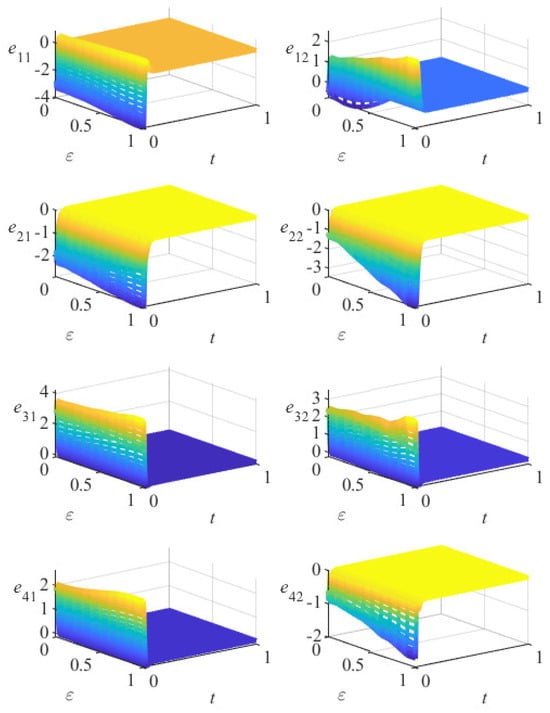
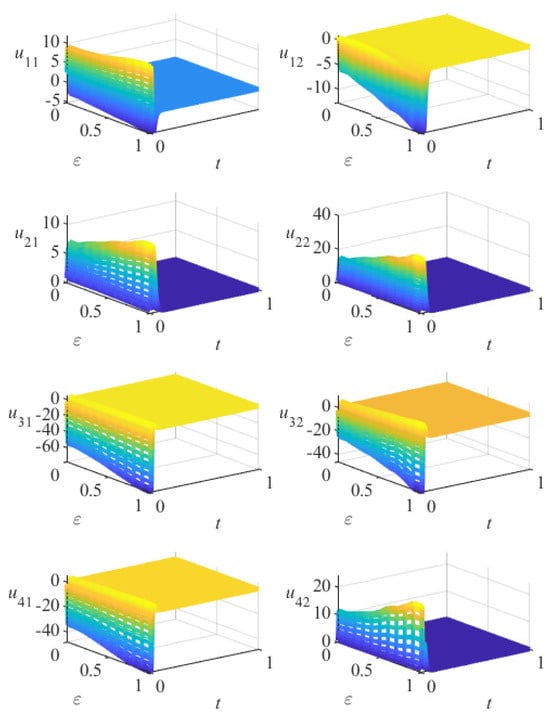
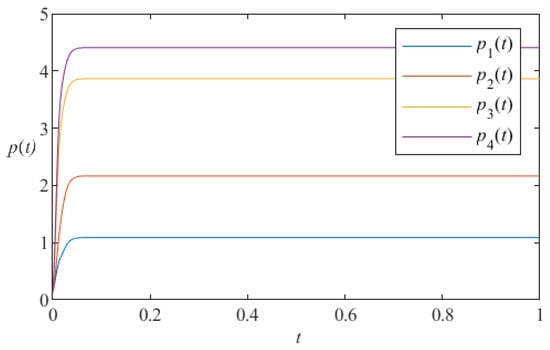
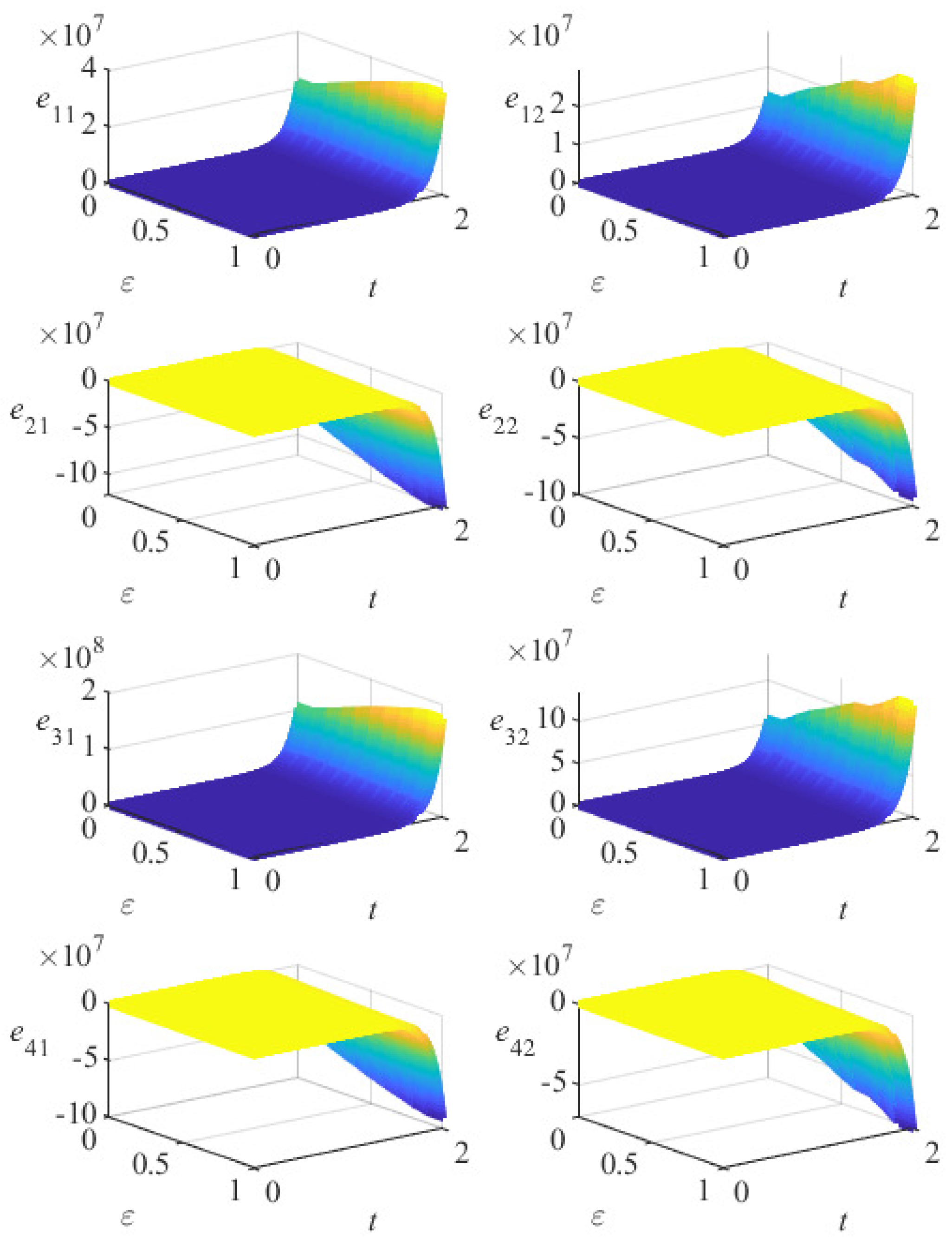
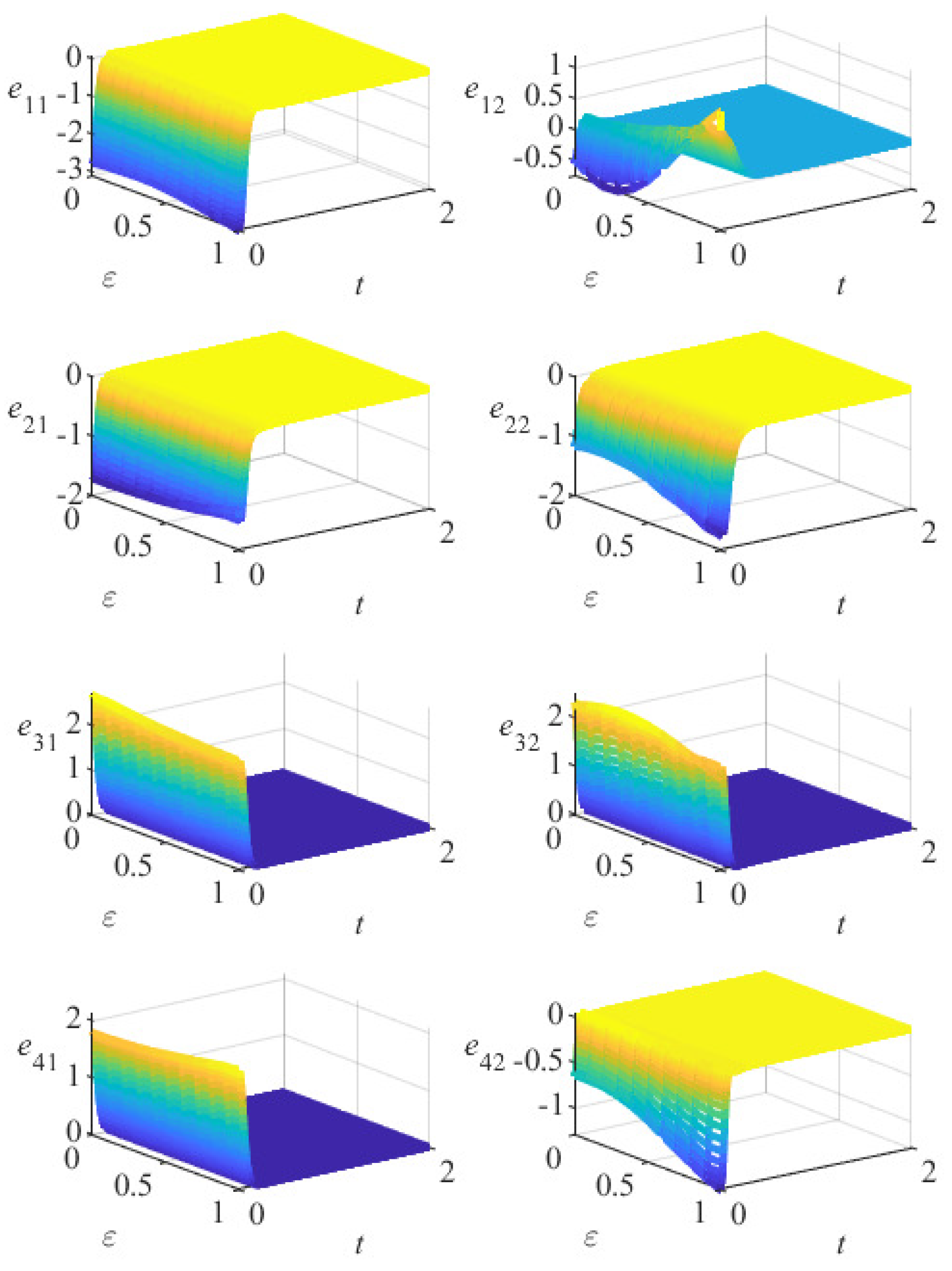
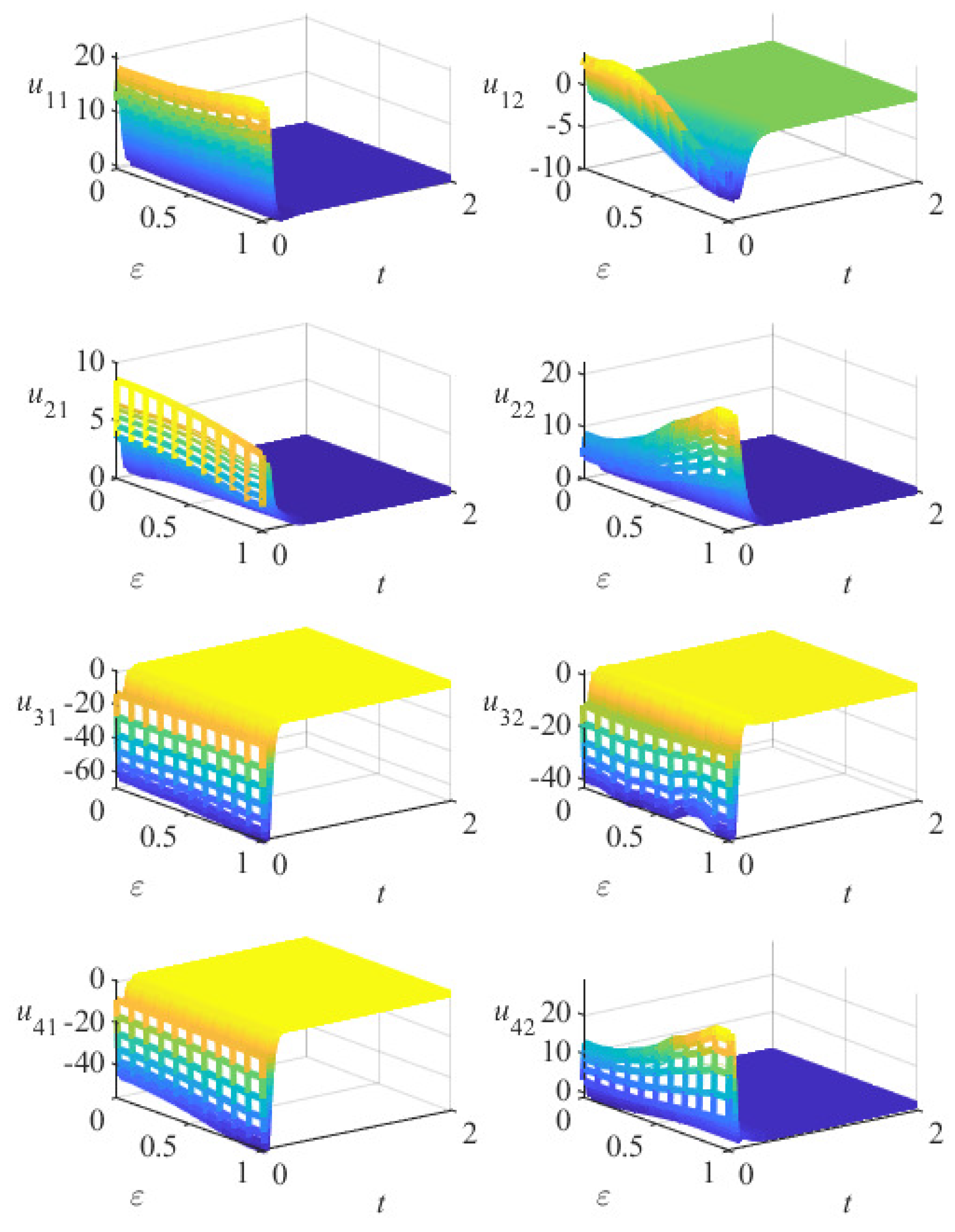
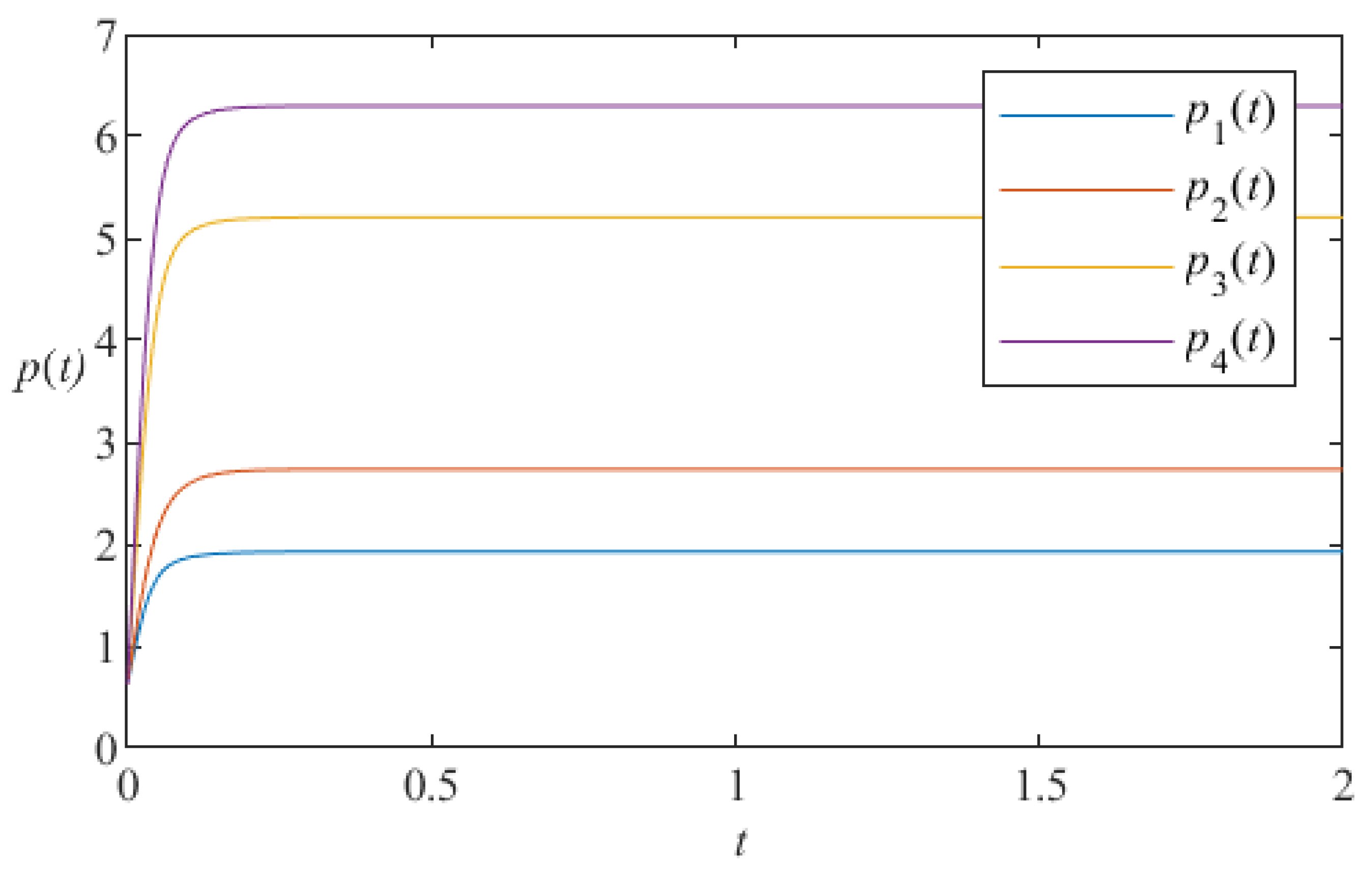
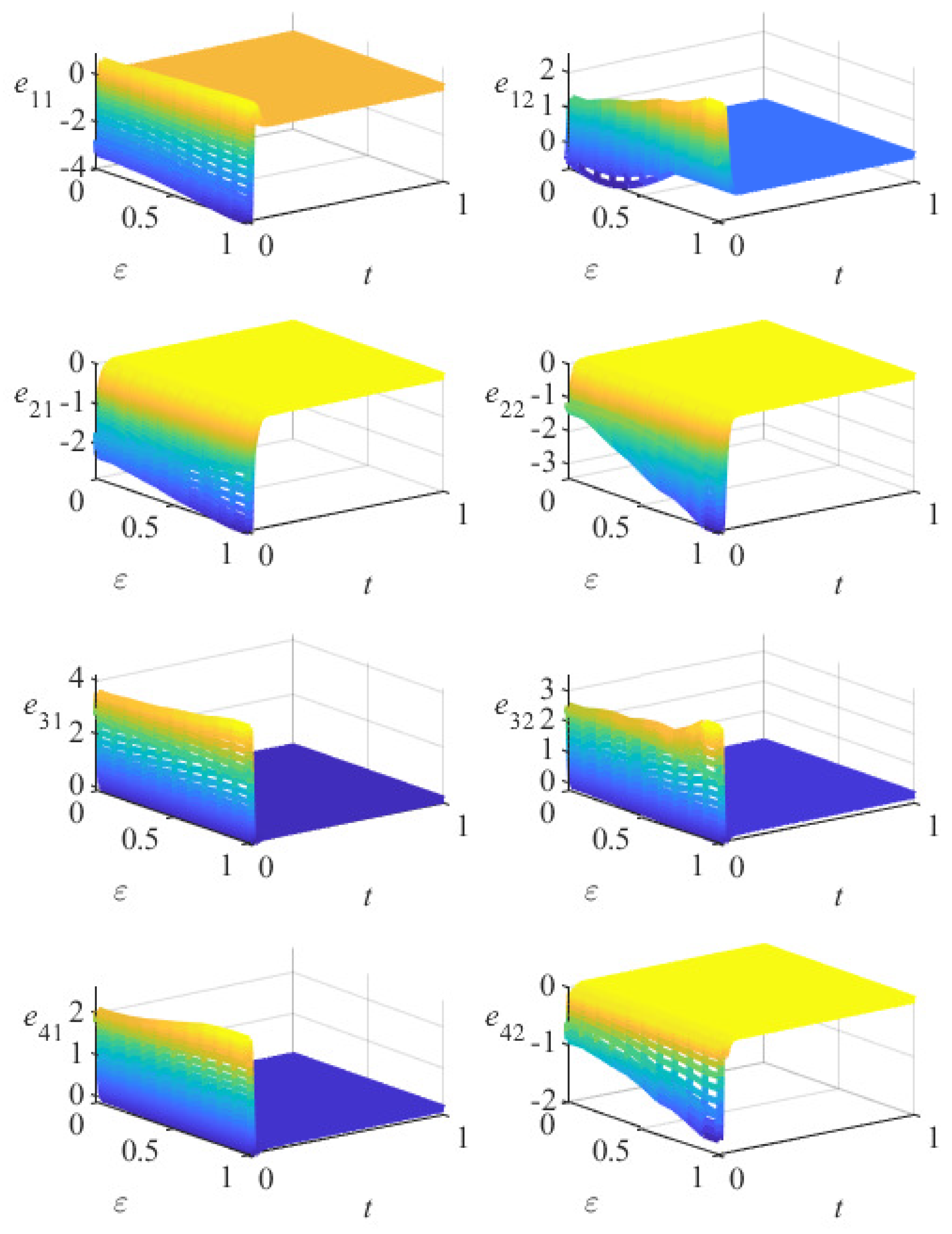
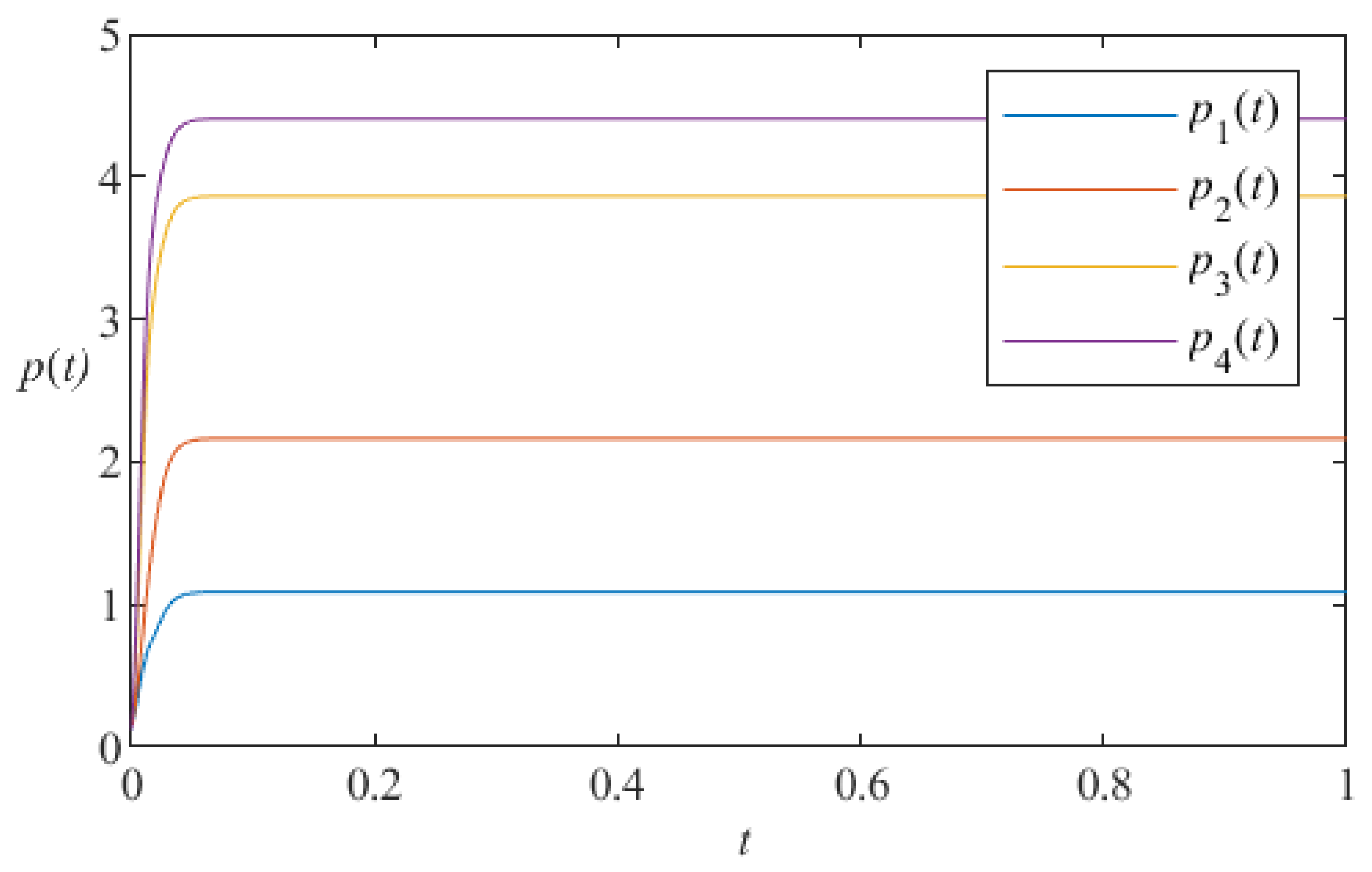
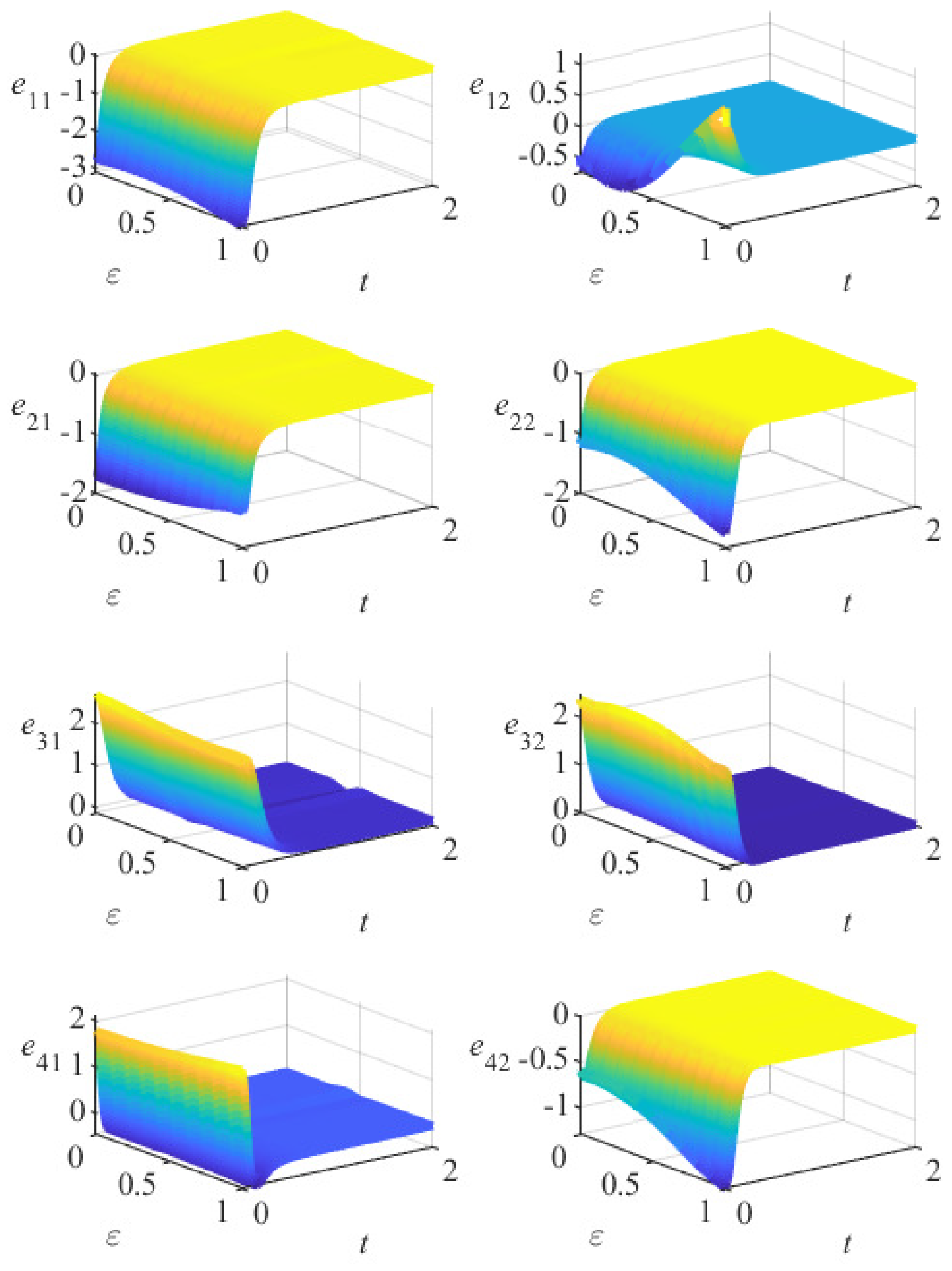
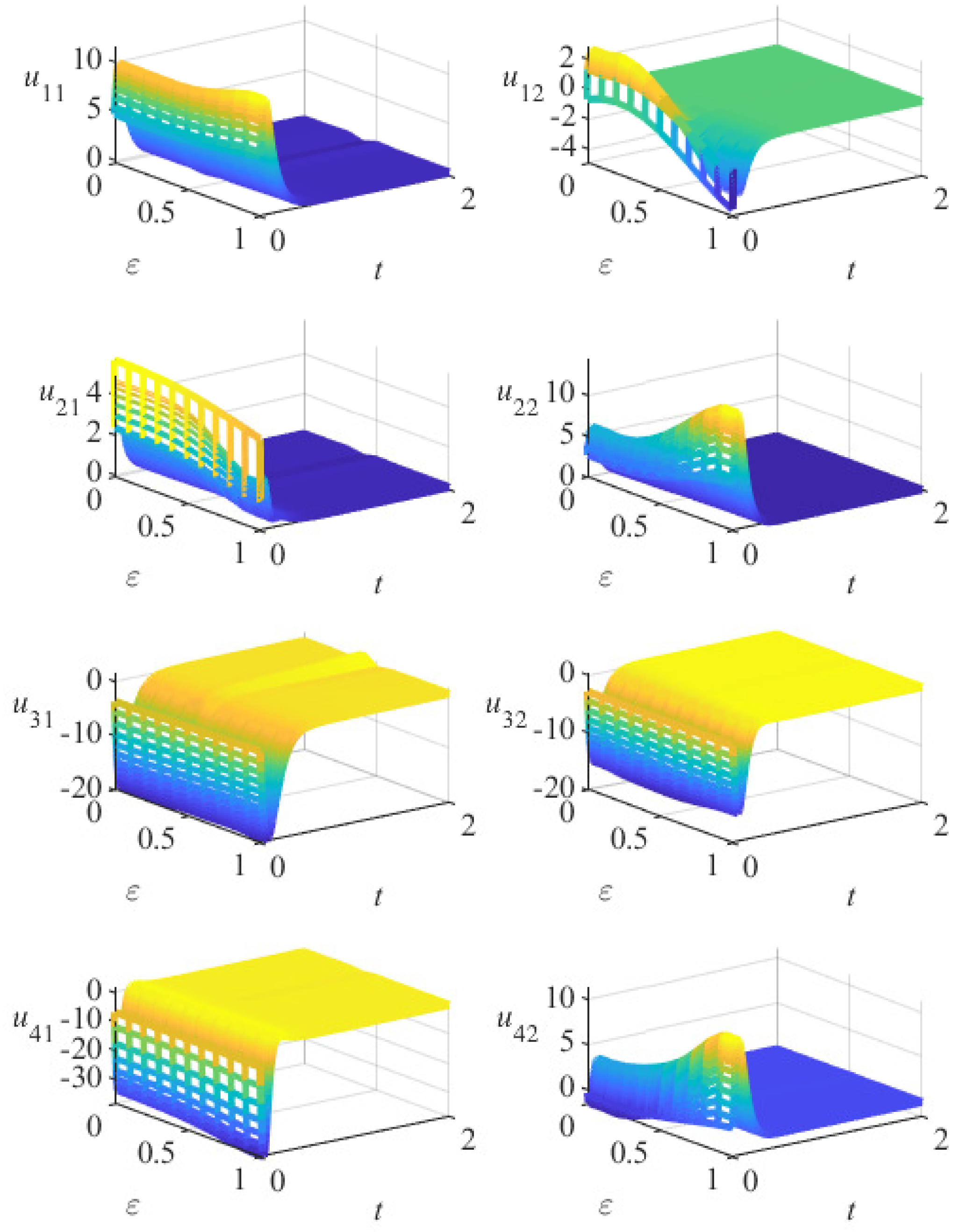
Owing to the property of tanh, and are obtained. Figure 1 shows that fractional-order SVPIDE-based MASs cannot reach consensus without the control. Figure 2 shows that consensus errors reach consensus with the use of the control and . Figure 3 shows the control input of leaderless fractional-order SVPIDE-based MASs. Figure 4 illustrates the adaptive control gain of fractional-order SVPIDE-based MASs.
Figure 1.
of fractional-order SVPIDE-based MASs without adaptive control.
Figure 2.
of the leaderless fractional-order SVPIDE-based MASs with adaptive control.
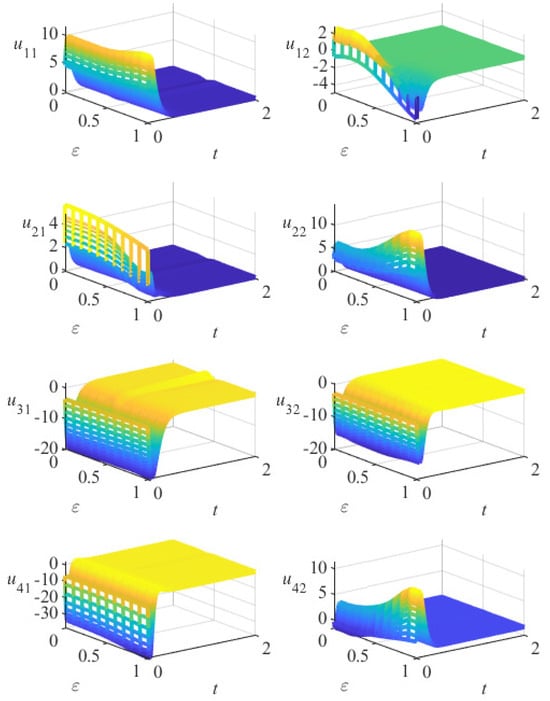
Figure 3.
The adaptive control input of the leaderless fractional-order SVPIDE-based MASs.
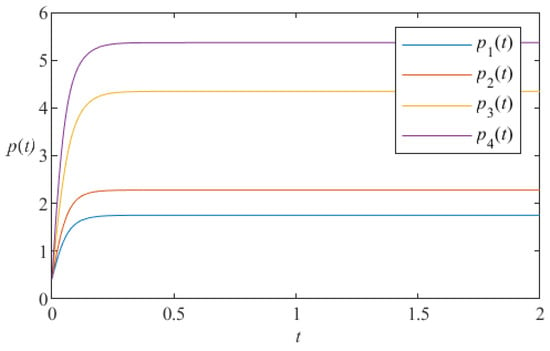
Figure 4.
The adaptive control gain of the leaderless fractional-order SVPIDE-based MASs.
Example 2.
To demonstrate the validity of Theorem 2, one nonlinear leader-following SVPIDE-based MAS with four following agents and one leader agent is described, where and other parameters are the same as those in Example 1.
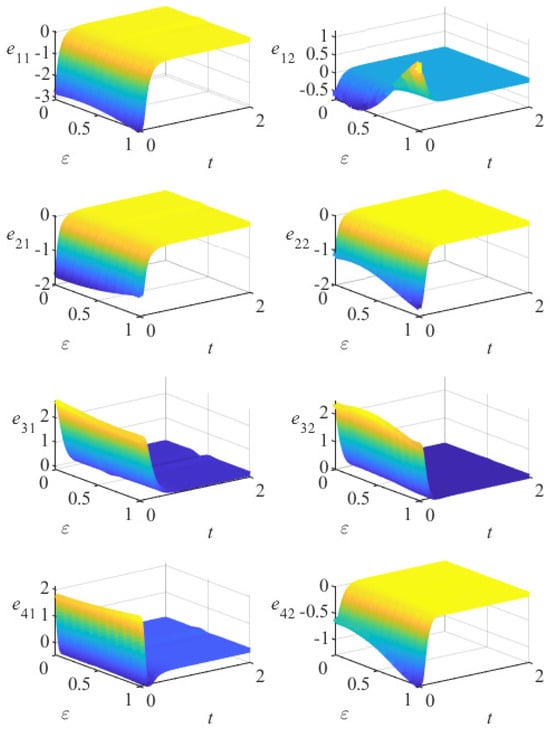
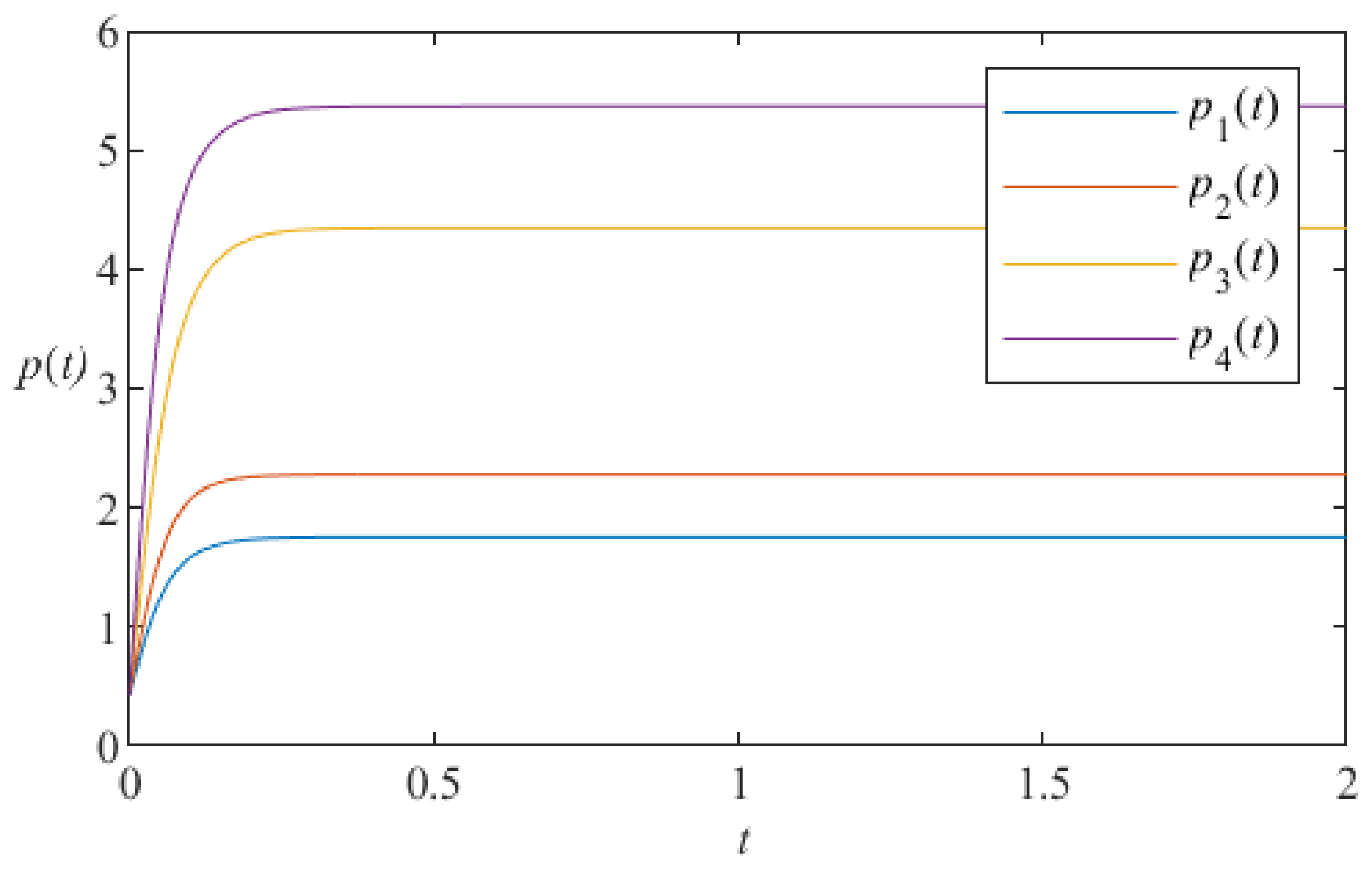
Figure 5 shows that consensus errors reach consensus with the use of the control and . Figure 6 shows the control input of leaderless fractional-order SVPIDE-based MASs. Figure 7 illustrates the adaptive control gain of fractional-order SVPIDE-based MASs.
Figure 5.
of the leader-following fractional-order SVPIDE-based MASs with adaptive control.
Figure 6.
The adaptive control input of the leader-following fractional-order SVPIDE-based MASs.
Figure 7.
The adaptive control gain of the leader-following fractional-order SVPIDE-based MASs.
Example 3.
Reaction–Diffusion Neural Networks (RDNNs) are a class of neural networks with spatial and temporal dynamics, commonly used for simulating and processing complex dynamic systems, especially in areas like secure communication [49] and image processing [50,51]. MASs governed by fractional-order PIDEs can be used for synchronization in RDNNs. Consider the following RDNNs:
where , is random, , , , and are chosen as
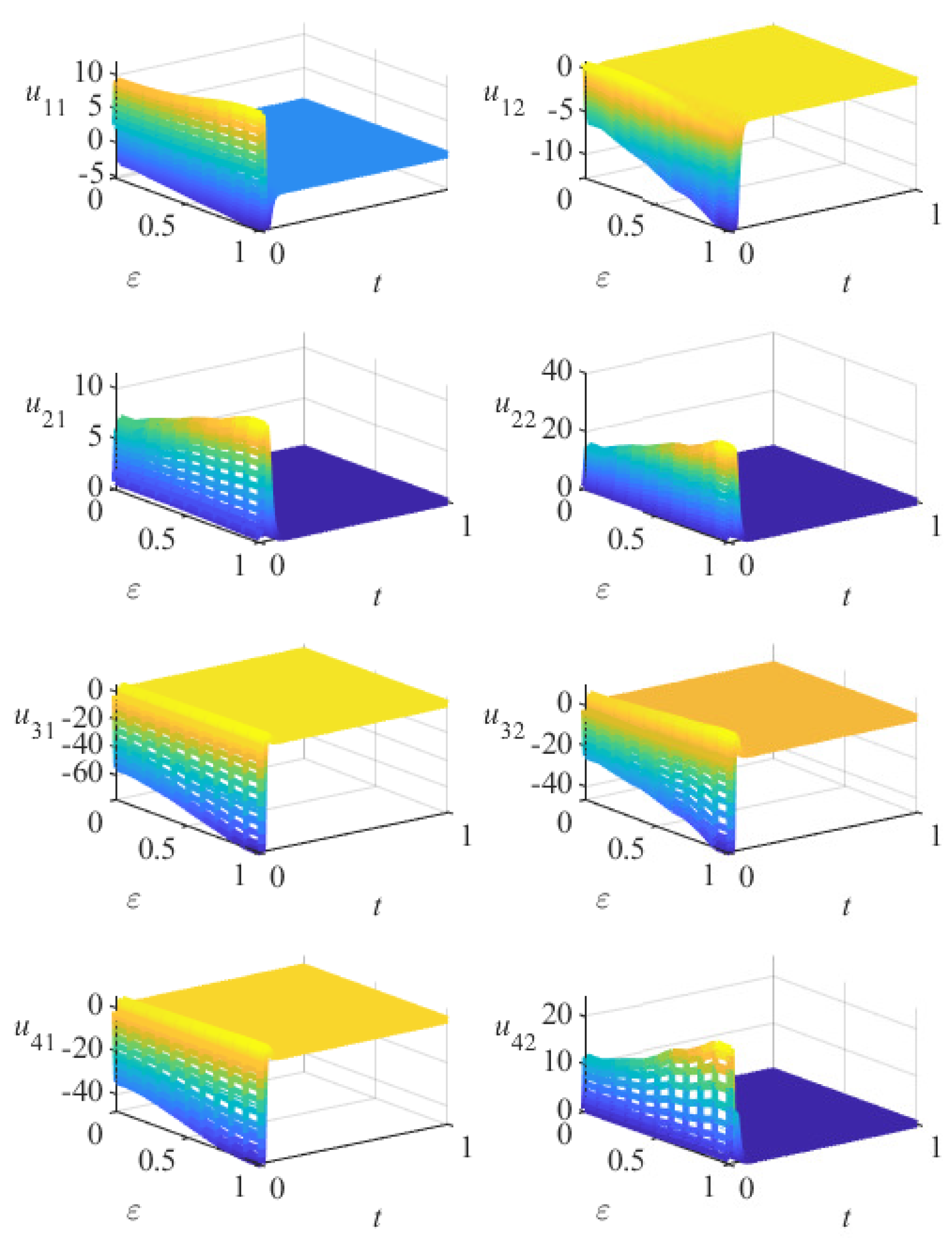
By Theorem 1, RDNNs under controller (6) are internally asymptotically stable. The evolutions of the states and inputs of four nodes are depicted in Figure 8 and Figure 9, respectively. Figure 10 shows the trajectory of the adaptive gain .
Figure 8.
of the RDNNs (27) with adaptive control.
Figure 9.
The adaptive control input of the RDNNs (27).
Figure 10.
The adaptive control gain of the RDNNs (27).
6. Conclusions
This paper studied one nonlinear fractional-order SVPIDE-based MAS, containing both nonlinear state terms and nonlinear integro-terms. A distributed adaptive control protocol was developed for leaderless fractional-order SVPIDE-based MASs, utilizing both states and differential components. For leader-following fractional-order SVPIDE-based MASs, another distributed adaptive control protocol was further refined to account for communication both among the following agents and between the leader and following agents. Sufficient conditions for consensus in both leaderless and leader-following fractional-order SVPIDE-based MASs were derived. Finally, an example demonstrated the effectiveness of the proposed adaptive controller. In future, bipartite consensus, group consensus, and finite-time consensus of sensor networks with spatio-temporal characteristics will be studied.
Author Contributions
Writing—original draft preparation, Z.L. and C.Y.; writing—review and editing, Y.W. and B.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China under Grant No. 62476117, Science and Technology Planning of Yunnan Provincial Science and Technology Department under Grant No. 202302AD080006, and Natural Science Foundation of Shandong Province under Grants No. ZR2019MF021.
Data Availability Statement
All the data in the simulation are included within this article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Hu, L.; Jian, L. Distributed Disturbance Observer-Based Containment Control of Multi-Agent Systems with Event-Triggered Communications. Mathematics 2024, 12, 3117. [Google Scholar] [CrossRef]
- Hou, Z.; Zhou, Z.; Yuan, H.; Wang, W.; Wang, J.; Xu, Z. Adaptive event-triggered consensus of multi-agent systems in sense of asymptotic convergence. Sensors 2024, 24, 339. [Google Scholar] [CrossRef] [PubMed]
- Joshi, N.; Mehta, A. Distributed discrete-time exponential sliding mode consensus protocol for discrete multi-agent system comprise of multiple robotic arms. ISA Trans. 2024, 148, 412–421. [Google Scholar] [CrossRef] [PubMed]
- Bretas, A.M.; Mendes, A.; Jackson, M.; Clement, R.; Sanhueza, C.; Chalup, S. A decentralised multi-agent system for rail freight traffic management. Ann. Oper. Res. 2023, 320, 631–661. [Google Scholar] [CrossRef]
- Binyamin, S.S.; Ben Slama, S. Multi-agent systems for resource allocation and scheduling in a smart grid. Sensors 2022, 22, 8099. [Google Scholar] [CrossRef] [PubMed]
- Gherairi, S. Design and implementation of an intelligent energy management system for smart home utilizing a multi-agent system. Ain Shams Eng. J. 2023, 14, 101897. [Google Scholar] [CrossRef]
- Cheng, Z.; Yang, L.; Yuan, Q.; Long, Y.; Ren, H. Distributed consensus estimation for networked multi-sensor systems under hybrid attacks and missing measurements. Sensors 2024, 24, 4071. [Google Scholar] [CrossRef]
- Nanda, P.; Patnaik, S. A multi-agent coalition-based approach for order fulfilment in e-commerce. Decis. Anal. J. 2023, 7, 100227. [Google Scholar] [CrossRef]
- Goswami, P.; Mukherjee, A.; Sarkar, B.; Yang, L. Multi-agent-based smart power management for remote health monitoring. Neural Comput. Appl. 2023, 35, 22771–22780. [Google Scholar] [CrossRef]
- Wu, J.; Yu, Y.; Ren, G. Leader-following formation control for discrete-time fractional stochastic multi-agent systems by event-triggered strategy. Fractal Fract. 2024, 8, 246. [Google Scholar] [CrossRef]
- Amirkhani, A.; Barshooi, A.H. Consensus in multi-agent systems: A review. Artif. Intell. Rev. 2022, 55, 3897–3935. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; He, Z.; Li, Z.; Zhang, Q.; Ding, Z. A survey of multi-agent systems on distributed formation control. Unmanned Syst. 2024, 12, 913–926. [Google Scholar] [CrossRef]
- He, W.; He, X.; Zou, M.; Li, H. PDE model-based boundary control design for a flexible robotic manipulator with input backlash. IEEE Trans. Control Syst. Technol. 2018, 27, 790–797. [Google Scholar] [CrossRef]
- Wang, J.W.; Wang, J.M. Spatiotemporal adaptive state feedback control of a linear parabolic partial differential equation. Int. J. Robust Nonlinear Control 2023, 33, 3850–3873. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, Y.; Wang, J.W.; Li, H.X. Backstepping-based distributed abnormality localization for linear parabolic distributed parameter systems. Automatica 2022, 135, 109930. [Google Scholar] [CrossRef]
- Wang, J.W.; Feng, Y.; Dubljevic, S.; Lam, H.K. Spatiotemporal fuzzy-observer-based feedback control for networked parabolic PDE systems. IEEE Trans. Fuzzy Syst. 2024, 32, 2625–2638. [Google Scholar] [CrossRef]
- Wang, X.; Wu, H.; Cao, J.; Li, X. Dynamic event-triggered boundary control for exponential consensus of multi-agent systems of impulsive PDEs with switching topology. Inf. Sci. 2024, 655, 119901. [Google Scholar] [CrossRef]
- Dai, J.; Yang, C.; Yan, X.; Wang, J.; Zhu, K.; Yang, C. Leaderless consensus control of nonlinear PIDE-type multi-agent systems with time delays. IEEE Access 2022, 10, 21211–21218. [Google Scholar] [CrossRef]
- Yang, C.; Huang, T.; Zhang, A.; Qiu, J.; Cao, J.; Alsaadi, F.E. Output consensus of multiagent systems based on PDEs with input constraint: A boundary control approach. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 370–377. [Google Scholar] [CrossRef]
- Ferrari-Trecate, G.; Buffa, A.; Gati, M. Analysis of coordination in multi-agent systems through partial difference equations. IEEE Trans. Autom. Control 2006, 51, 1058–1063. [Google Scholar] [CrossRef]
- Qi, J.; Vazquez, R.; Krstic, M. Multi-agent deployment in 3-D via PDE control. IEEE Trans. Autom. Control 2014, 60, 891–906. [Google Scholar] [CrossRef]
- Man, J.; Sheng, Y.; Chen, C.; Zeng, Z. PDE-based finite-time deployment of heterogeneous multi-agent systems subject to multiple asynchronous semi-Markov chains. IEEE Trans. Circuits Syst. I Regul. Pap. 2023, 71, 885–897. [Google Scholar] [CrossRef]
- Wang, X.; Huang, N. Finite-time consensus of multi-agent systems driven by hyperbolic partial differential equations via boundary control. Appl. Math. Mech. 2021, 42, 1799–1816. [Google Scholar] [CrossRef]
- Wan, X.; Yan, X.; Li, Z.; Qiu, J.; Yang, C. Consensus of multi-agent system with reaction-diffusion terms and time delays via output-feedback adaptive boundary control. Int. J. Adapt. Control Signal Process. 2024, 38, 3361–3380. [Google Scholar] [CrossRef]
- Li, L.; Liu, J. Consensus tracking control and vibration suppression for nonlinear mobile flexible manipulator multi-agent systems based on PDE model. Nonlinear Dyn. 2023, 111, 3345–3359. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, A.; Chen, X.; Chen, X.; Qiu, J. Stability and stabilization of a delayed PIDE system via SPID control. Neural Comput. Appl. 2017, 28, 4139–4145. [Google Scholar] [CrossRef]
- Gabriel, J.; Deutscher, J. Robust cooperative output regulation for networks of hyperbolic PIDE–ODE systems. IEEE Trans. Autom. Control 2023, 69, 888–903. [Google Scholar] [CrossRef]
- Koochakzadeh, A.; Naderi Soorki, M.; Azizi, A.; Mohammadsharifi, K.; Riazat, M. Delay-dependent stability region for the distributed coordination of delayed fractional-order multi-agent systems. Mathematics 2023, 11, 1267. [Google Scholar] [CrossRef]
- Yan, X.; Yang, C.; Cao, J.; Korovin, I.; Gorbachev, S.; Gorbacheva, N. Boundary consensus control strategies for fractional-order multi-agent systems with reaction-diffusion terms. Inf. Sci. 2022, 616, 461–473. [Google Scholar] [CrossRef]
- Yan, X.; Li, K.; Zhuang, J.; Yang, C.; Cao, J. Boundary control strategies for consensus of fractional-order multi-agent systems based on coupling PDE-ODEs. IEEE Trans. Circuits Syst. II Express Briefs 2023, 71, 2179–2183. [Google Scholar] [CrossRef]
- Yan, X.; Li, K.; Yang, C.; Zhuang, J.; Cao, J. Consensus of fractional-order multi-agent systems via observer-based boundary control. IEEE Trans. Netw. Sci. Eng. 2024, 11, 3370–3382. [Google Scholar] [CrossRef]
- Yang, J.; Fečkan, M.; Wang, J. Consensus of linear conformable fractional order multi-agent systems with impulsive control protocols. Asian J. Control 2023, 25, 314–324. [Google Scholar] [CrossRef]
- Zhao, L.; Wu, H.; Cao, J. Event-triggered boundary consensus control for multi-agent systems of fractional reaction–diffusion PDEs. Commun. Nonlinear Sci. Numer. Simul. 2023, 127, 107538. [Google Scholar] [CrossRef]
- Wang, Z.P.; Wu, H.N.; Wang, X.H. Sampled-data fuzzy control with space-varying gains for nonlinear time-delay parabolic PDE systems. Fuzzy Sets Syst. 2020, 392, 170–194. [Google Scholar] [CrossRef]
- Bouklata, A.; Giri, F.; Krstic, M.; Brouri, A.; Chaoui, F. Parameter identification of linear systems with heat sensors subject to unknown space-varying parameters. Syst. Control Lett. 2024, 192, 105890. [Google Scholar] [CrossRef]
- Yang, C.; Qiu, J.; He, H. Exponential synchronization for a class of complex spatio-temporal networks with space-varying coefficients. Neurocomputing 2015, 151, 401–407. [Google Scholar] [CrossRef]
- Wang, J.W. Spatial domain decomposition approach to dynamic compensator design for linear space-varying parabolic MIMO PDEs. IET Control Theory Appl. 2020, 14, 39–51. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, C.; Yang, Y.; Li, N. Observer-based consensus of fractional order parabolic PDEs agents on directed networks via boundary communication. Chaos Solitons Fractals 2023, 170, 113332. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, H. Bipartite consensus for multi-agent networks of fractional diffusion PDEs via aperiodically intermittent boundary control. Math. Biosci. Eng. 2023, 20, 12649–12665. [Google Scholar] [CrossRef] [PubMed]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Seuret, A.; Gouaisbaut, F. Wirtinger-based integral inequality: Application to time-delay systems. Automatica 2013, 49, 2860–2866. [Google Scholar] [CrossRef]
- Tversky, A.; Gati, I. Similarity, separability, and the triangle inequality. Psychol. Rev. 1982, 89, 123. [Google Scholar] [CrossRef]
- Wang, J.W.; Wu, H.N. Some extended Wirtinger’s inequalities and distributed proportional-spatial integral control of distributed parameter systems with multi-time delays. J. Frankl. Inst. 2015, 352, 4423–4445. [Google Scholar] [CrossRef]
- Li, Y.X.; Wang, Q.Y.; Tong, S. Fuzzy adaptive fault-tolerant control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 1372–1379. [Google Scholar] [CrossRef]
- Gong, P.; Lan, W.; Han, Q.L. Robust adaptive fault-tolerant consensus control for uncertain nonlinear fractional-order multi-agent systems with directed topologies. Automatica 2020, 117, 109011. [Google Scholar] [CrossRef]
- Zhao, L.; Zhao, F.; Che, W.W. Distributed adaptive fuzzy fault-tolerant control for multi-agent systems with node faults and denial-of-service attacks. Inf. Sci. 2023, 631, 385–395. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, S.; Ahn, C.K.; Xie, Y. Adaptive neural consensus for fractional-order multi-agent systems with faults and delays. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 7873–7886. [Google Scholar] [CrossRef]
- Zhang, J.; Tong, S. Event-triggered fuzzy adaptive output feedback containment fault-tolerant control for nonlinear multi-agent systems against actuator faults. Eur. J. Control 2023, 75, 100887. [Google Scholar] [CrossRef]
- Shanmugam, L.; Mani, P.; Rajan, R.; Joo, Y.H. Adaptive synchronization of reaction–diffusion neural networks and its application to secure communication. IEEE Trans. Cybern. 2018, 50, 911–922. [Google Scholar] [CrossRef] [PubMed]
- Hui, M.; Liu, X.; Zhu, S.; Cao, J. Event-triggered impulsive cluster synchronization of coupled reaction-diffusion neural networks and its application to image encryption. Neural Netw. 2024, 170, 46–54. [Google Scholar] [CrossRef]
- Kowsalya, P.; Kathiresan, S.; Kashkynbayev, A.; Rakkiyappan, R. Fixed-time synchronization of delayed multiple inertial neural network with reaction-diffusion terms under cyber–physical attacks using distributed control and its application to multi-image encryption. Neural Netw. 2024, 180, 106743. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).