Abstract
This article investigates a class of multi-agent systems (MASs) with known dynamics external disturbances, where the communication graph is directed, and the followers have undirected connections. To eliminate the impacts of external disturbance, the technologies of disturbance observer-based control are introduced into the containment control problems. Additionally, to save communication costs and energy consumption, a distributed disturbance observer-based event-triggered controller is employed to achieve containment control and reject disturbance. Furthermore, designing the event-triggered function using an exponential function is beneficial for a time-dependent term while ensuring the exclusion of Zeno behavior. Finally, a numerical simulation is provided to validate the effectiveness of the theoretical analysis.
MSC:
93A16
1. Introduction
Consensus, as a fundamental problem in the cooperative control of multi-agent systems (MASs), has garnered significant attention over the past few decades due to its potential applications in various areas, such as robotic systems, groups of unmanned aerial vehicles, and power-sharing of DC microgrids (see, for example, [1,2,3,4]). Notably, its application in modeling various system dynamics and engineering scenarios has been conducted on consensus problems, as evidenced by studies such as [5,6,7]. Consensus problems have two categories: leaderless consensus and leader-following tracking consensus.
The works above mainly investigate these two types of consensus problems. However, there are scenarios in practical applications, as well as in social animals and insects. Motivated by practical applications and natural phenomena, the containment control problem with multiple leaders has been widely investigated, that is, all followers tend to the convex hull spanned by all the leaders (see, for example, [6,7,8,9,10,11,12]). Many containment control strategies have been studied for different MASs, including first-order or second-order agent dynamics [9], fractional-order systems [10,11,12], homogeneous high-order MASs [13,14], and heterogeneous high-order MASs [15].
It is worth pointing out that most research on MASs has mainly focused on the ideal models. However, external disturbances in practical MASs are widespread and affect system performance. In practical engineering, systems often operate in environments with various disturbances, impacting control accuracy. Additionally, the cooperative control of MASs has strict requirements for control accuracy. Therefore, it is crucial to study the consensus problem for MASs in the presence of external disturbances. Due to physical disturbances such as external environment disturbance and system constraint disturbance, it is desirable to design distributed disturbance rejection strategies for MASs, such as anti-interference methods, sliding-mode observers, disturbance observers, output regulation, and so on [16,17,18,19,20,21,22,23,24,25,26]. For instance, since each agent cannot access the desired tracking signal and external disturbances, the authors in [16] utilized a dynamic compensator independent of the exogenous signal and introduced a dynamic internal-model-based component. Recently, the authors of [17] utilized the distributed event-based controller and designed a disturbance observer for MASs with matched disturbances to guarantee performance requirements and avoid exogenous disturbances, and similarly for the controllers in [18] under an observer-based dynamic event-triggered scheme. In [22], based on designing disturbance observers, event-triggered control involving controllers and actuator-updating rules are provided. Disturbance observer is designed for MASs under deterministic disturbances in [23]. Recently, significant progress has been made in MASs based on the state or relative state measurements [27,28,29,30].
In the aforementioned studies, participants in MASs must exchange interaction information through their microprocessors. However, highly frequent, continuous communication and heavy computational burden significantly increase the overall system cost. Additionally, to avoid these situations, agents are equipped with limited resources and power. Therefore, a key issue in resource-constrained MASs is ensuring the performance of the closed-loop system while reducing the workload of sensors and actuators. Cooperative control based on event-triggered policies provides an effective solution [31,32,33,34,35,36,37,38,39,40,41]. Distributed event-triggered consensus control usually uses zero-order hold (ZOH) [42,43,44,45]. The works [35,36] make a breakthrough in the estimation method based on model values, whereby the event-triggered protocols help reduce communication frequency. In [33,43,45,46], each agent’s controller is designed based on the most recent event moment and remains unchanged until the next event moment. These control strategies reduce the number of controller or state updates. However, when using inter-agent communication, continuous communication between agents is required to check event-triggered conditions [47,48,49,50,51,52,53]. It is observed that the existence of a positive trigger time cannot be guaranteed in [17], although the Zeno behavior is excluded by incorporating an exponential decay term in the triggering threshold.
Motivated by the aforementioned works, this work considers the distributed disturbance containment problem for linear MASs with event-triggered communications. The communication topology among followers and leaders is directed. To solve this problem, a distributed containment protocol is proposed to reach containment control and simultaneously reject disturbances. In particular, through event-triggered communication, the disturbance estimator is constructed using a disturbance observer control design and non-periodic information from followers. A time-independent threshold is used to design the trigger condition for event-triggered communication.
Inspired by the above discussion, we propose a disturbance observer-based containment control algorithm. The main contributions of this paper are inthree aspects:
- (1)
- In contrast to the existing disturbance containment control algorithms that only focus on traditional MASs [23], this paper targets a class of external disturbances with known dynamics. We propose a disturbance observer-based containment control algorithm, which introduces a disturbance compensation term to offset the external disturbance.
- (2)
- Compared with the existing containment control methods developed in [23,47] for MASs with continuous communication and actuation, the proposed event-triggered containment control method has the advantage of reducing the burden of communication and actuation.
- (3)
- Different from the control methods in [40,45], the triggering functions designed in this paper are independent of the number of nodes (which represent the scale of the network) and do not require continuous communication. Hence, the event-triggered strategies are expected to be scalable with low communication costs. The design of the event-triggered function using an exponential function is beneficial for a time-dependent term and also eliminates Zeno behavior. By selecting appropriate coefficients for each exponential function, we can balance the communication frequency and control performance.
2. Preliminaries and Problem Formulation
2.1. Graph Theroy
The communication topology among the N agents is represented by a directed graph , where and are the node set and the edge set, respectively. The adjacency matrix is given by , if . The Laplacian matrix of is defined as , where and , where . The in-degree of agent i is defined as . In this article, a group of N agents composed of M followers and leaders is represented by a directed graph . The set of followers and leaders is denoted by and , respectively. The leaders have no neighbors among themselves. Thus, the Laplacian matrix of can be partitioned as
where and .
2.2. Notations
Throughout this article, the following notations are used. denotes the Euclidean norm of matrices. For matrices A and B, denotes the matrix Kronecker product of A and B. For a square real matrix, means that Z is a positive definite (semi-definite), and represents its eigenvalues. denotes the identity matrix and denotes an column vector of all 1.
2.3. Problem Statement
Consider N agents of a linear MAS with a directed graph . The dynamics of followers are described by
where and are the ith agent’s state and output state. A, B, and D are known constant matrices of appropriate dimensions. is a disturbance whose dynamics are given as
with S being a known constant matrix.
To proceed, we also need the following assumptions and Lemma.
Assumption 1
([17]). is stabilizable.
Assumption 2
([17]). The digraph is connected. For each follower , at least one leader has a directed path to its follower.
Assumption 3
([17]). The disturbance is matched, i.e., there exists a matrix F, such that .
Assumption 4
([17]). The eigenvalues of the matrix S are on the imaginary axis, and the pair is observable.
Remark 1.
Based on the same system model object, we use the same assumptions as in [17]. These assumptions meet the requirements of system stability and observable, and satisfy the matched disturbance-related conditions.
Definition 1
(Containment control problem [6]). Given the MASs (1) and a directed graph , find a distributed controller so that the followers converge to the convex hull spanned by the states of the leaders, that is, .
Lemma 1
([6]). Under Assumption 2, all the eigenvalues of have positive real parts, is non-negative, and .
3. Main Results
In this section, we design a distributed disturbance observer-based containment controller for systems (1) and (2) as follows:
where and are the estimates of the disturbance and the internal variable of the observer, respectively. and D are gain matrices to be determined. And , where is the kth event-triggered instant of agent . For agent , we define the measurement error as
The event-triggered function for each agent i is given by
where is the in-degree of agent i, and and are positive constants. As long as the triggering condition is fulfilled, an event is triggered for agent i. At this time instant, agent i updates its observer-based controller (3) using its current state of the observer and broadcasts the current state of the observer to its out-neighbors. Meanwhile, is reset to zero. When agent i receives new information from its neighbors, the controller for agent i will also be updated immediately. If for agent , there is no communication occurring until the next event is triggered.
Remark 2.
Compared with [40], we deal with the MASs with disturbance, and the applicability of the control algorithm is better. Compared with reference [41], our event-triggered controller adopts the time-independent exponential function trigger condition, which is more general than the trigger condition of reference [41].
Define for as follows:
From (1)–(3), we have
Let , and . Define the relative input measurements of the ith follower as follows:
Then, it follows that
And we also define the relative observer measurements of the ith follower as follows:
where , and . For , it follows from (1)–(8) that
Using (9) for (7), one can obtain that
Using (2) and (3), one can obtain that
Next, Algorithm 1 is presented with the procedure of the controller’s implementation.
Theorem 1.
Under Assumption 1–5, consider the MAS (1) and disturbance signals (2) with the distributed disturbance observer-based event-triggered controller (3) using Algorithm 1. Then, the protocol (3) solves the containment control problem.
| Algorithm 1 Distributed Disturbance Observer-Based Containment Control |
|
Under Assumptions 1–5, for disturbance signals in (2), distributed disturbance observer-based event-triggered controller (3) can be constructed by the following form: (I) Solve the following LMI: (II) Let the feedback matrix . (III) Take a symmetric matrix , (IV) Let the observer gain . (V) Select positive constants , the gains be designed in the proof of Theorem 1. (VI) Select the parameters and to be any positive constants. |
Proof of Theorem 1.
Choose a Lyapunov function candidate , and let
and
where P and are positive definite. Evidently, V is also positive definite.
Its derivative is obtained as
Note that
Note that , we have
Because , by using Young’s inequality, we have
and
Then, it follows from (16) that
Let and . Under Assumptions 2 and 3 and Lemma 1, is a symmetric positive definite, and there exists a unitary matrix satisfying , where is an upper-triangular matrix with as its diagonal entries.
where and .
Noting that , we have
where .
Substituting (22), (23), and the event-triggered function (4) into (21) yields
where .
According to the comparison lemma [17], we have
where is defined as follows:
with being a parameter. It is not difficult to verify that . We conclude that and . Therefore, the containment control problem stated in Definition 1 is solved. □
Feasibility Analysis
In this section, we show the development method to analyze the feasibility of the proposed controller (3). The result is summarized in the following theorem.
Theorem 2.
Consider the linear MAS (1), controller (3), and triggering condition (4). The Zeno behavior is excluded.
Proof of Theorem 2.
We adopt the method of contradiction. Suppose there is at least one agent exhibiting Zeno behavior. Without loss of generality, assume that agent i exhibits Zeno behavior.
Then, for agent i, there exists a finite time , such that and . For any , , such that , for any .
Consider the evolution of , we have ; then, the upper right-hand Dini derivative of over can be written as
It follows that
As shown in Theorem 1, is bounded, which implies that is bounded. Therefore, we can determine that for any , is also bounded, where denotes the latest event-triggering instant of agent j.
From (25), we can obtain that will not approach zero unless approaches zero, which implies that there exists , such that . Substituting (5) and (9) into (25), one has
where and .
Consider a non-negative function satisfying the following:
Then, we have that , where is the analytical solution to (27). Then, it follows that
It is not difficult to see that the triggering function (4) satisfies if we have the following condition:
Therefore, a lower bound can be obtained by solving the following inequality:
Then, we can determine that
where is a lower bound .
Note that is strictly positive for any finite time. One has from (30) that , which implies that . This contradicts the fact that . Therefore, the Zeno behavior is excluded for all the agents for any finite time. □
4. Simulation
Consider MASs with the communication graph , where six followers and three leaders . Assume that the dynamics matrices of (1) are
By solving the LMI (12) and (13) in Algorithm 1, the feedback gain matrices and H are
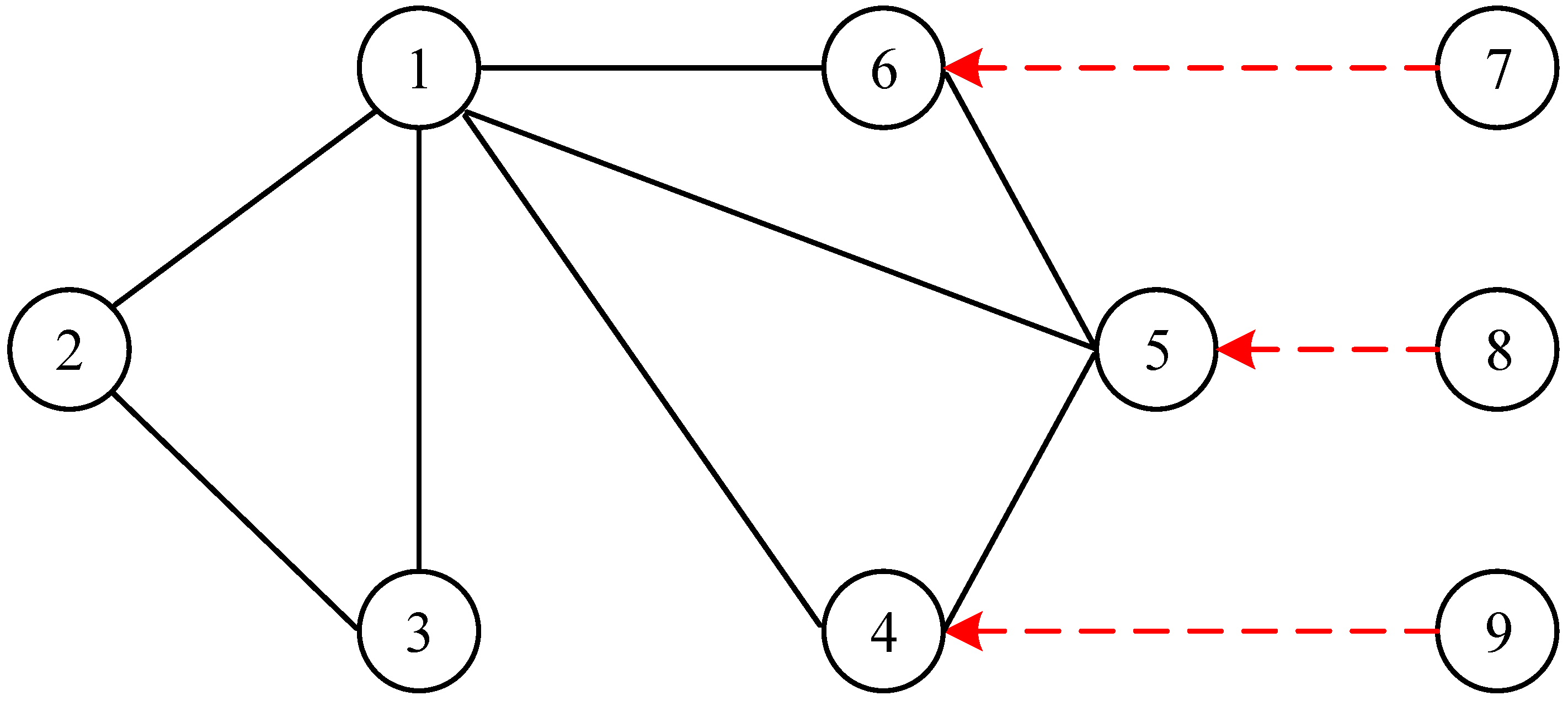
The communication graph is given in Figure 1, in which satisfies Assumption 1. Then, the matrices and are as follows:
The initial conditions of the closed-loop system are randomly chosen. The other parameters are set as follows for all six followers : , , and .
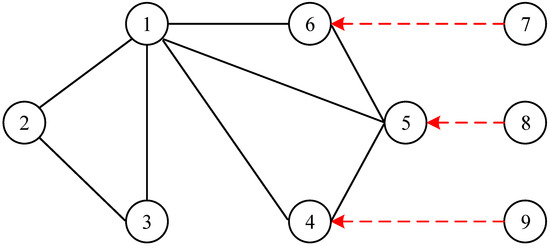
Figure 1.
Communication graph .
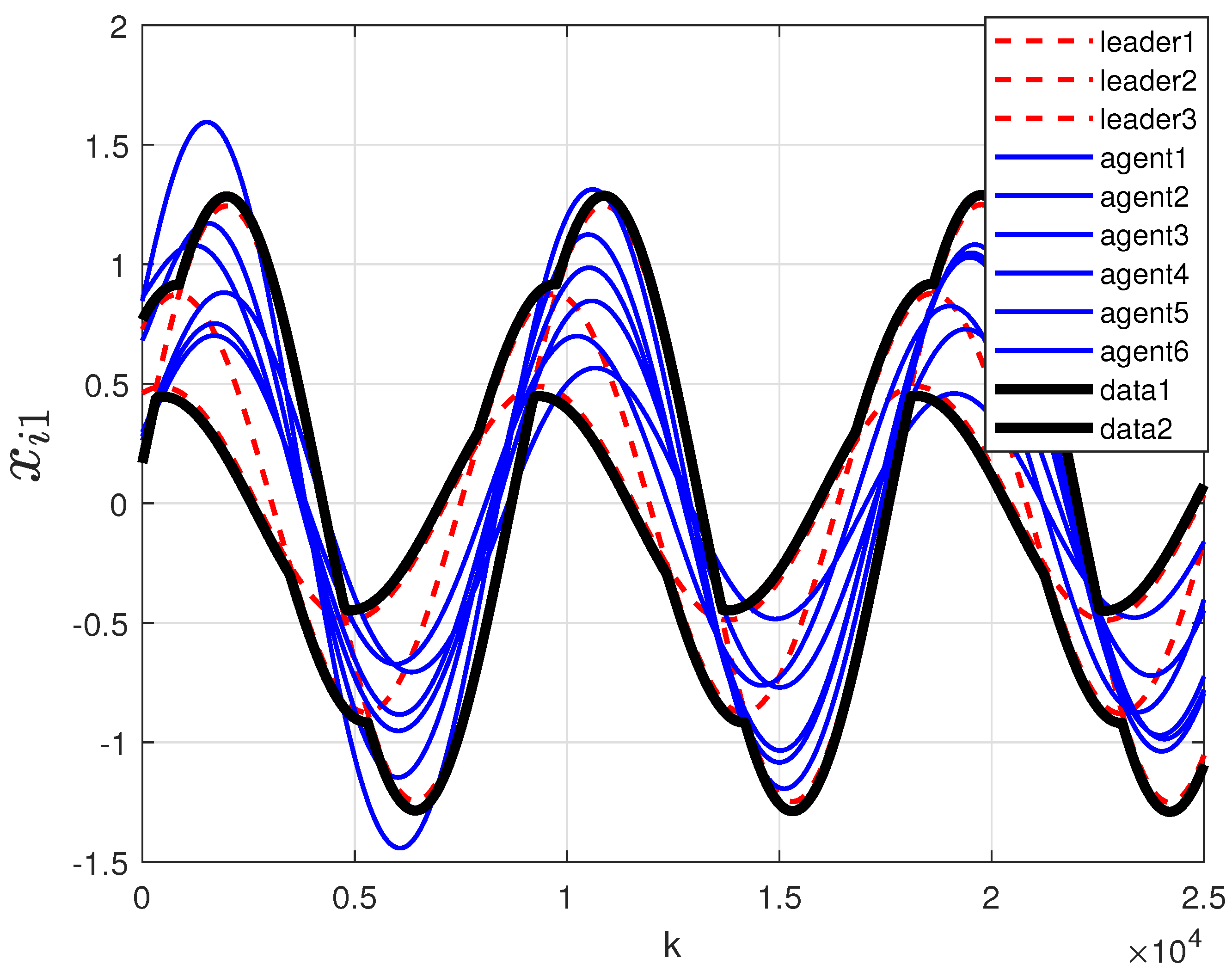
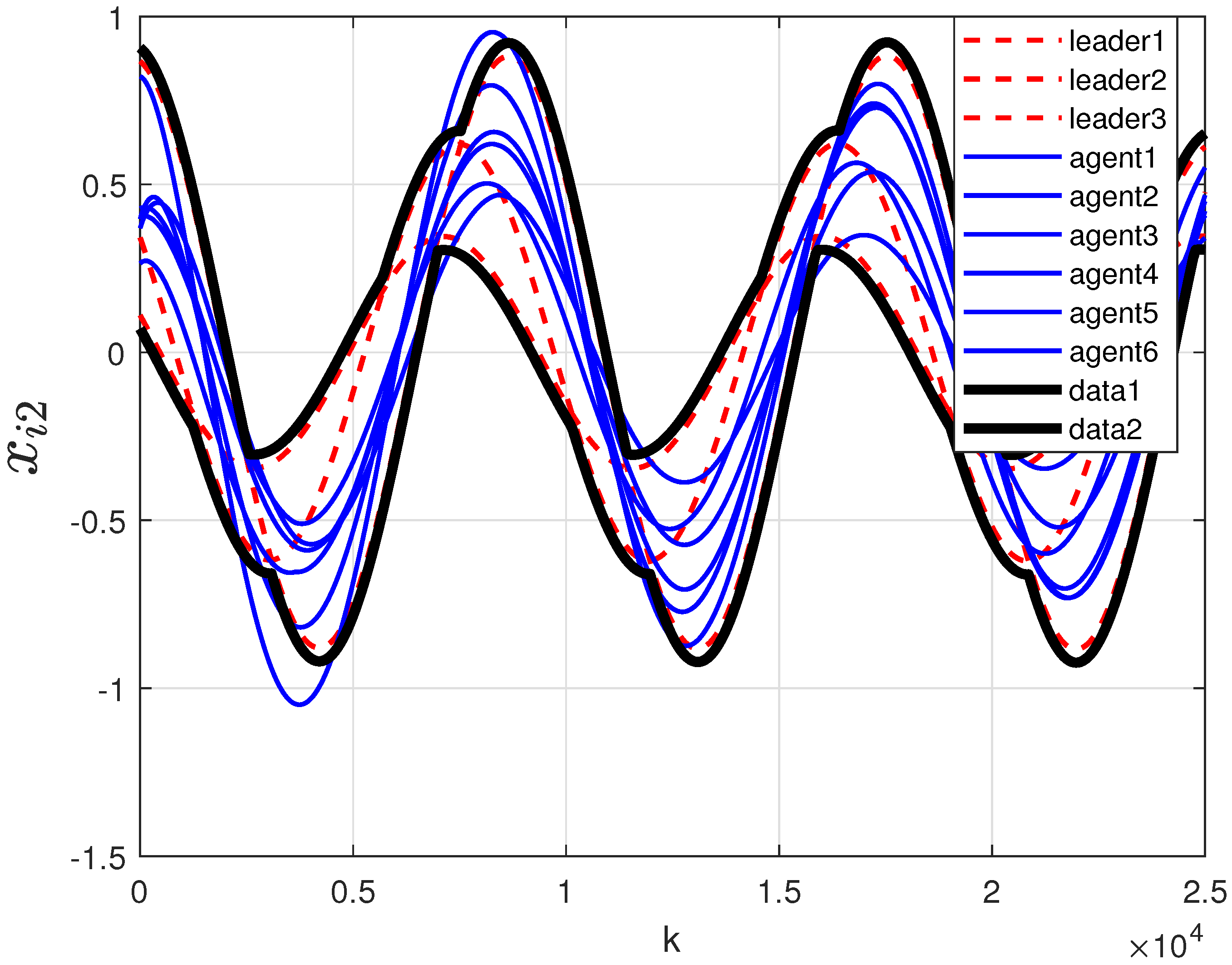
Through Figure 2 and Figure 3, we can obtain the convex hull of all followers’ states converging to the respective leader’s states, where the real line represents the follower’s trajectory, the imaginary line represents the leader’s trajectory, and the black rough line represents the convex hull of the leader’s trajectory.
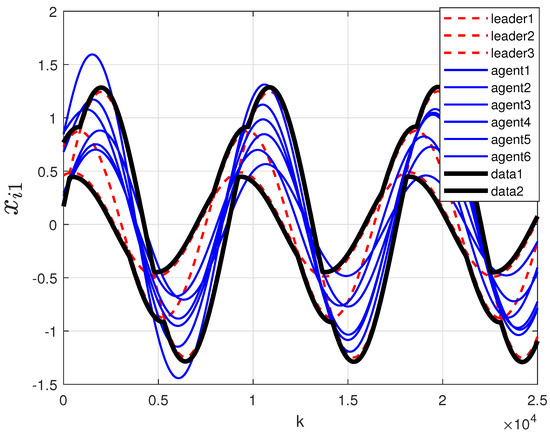
Figure 2.
The first−state trajectories of nine agents under controller (3).
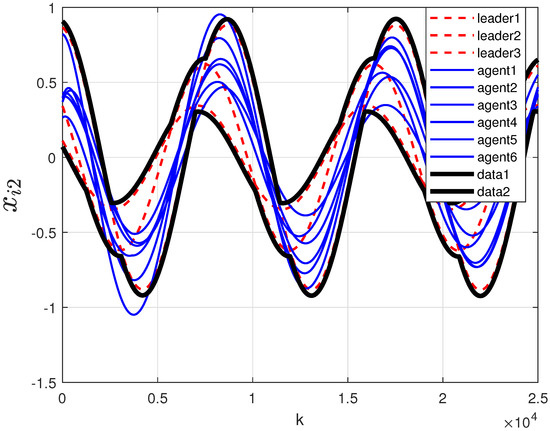
Figure 3.
The second−state trajectories of nine agents under controller (3).
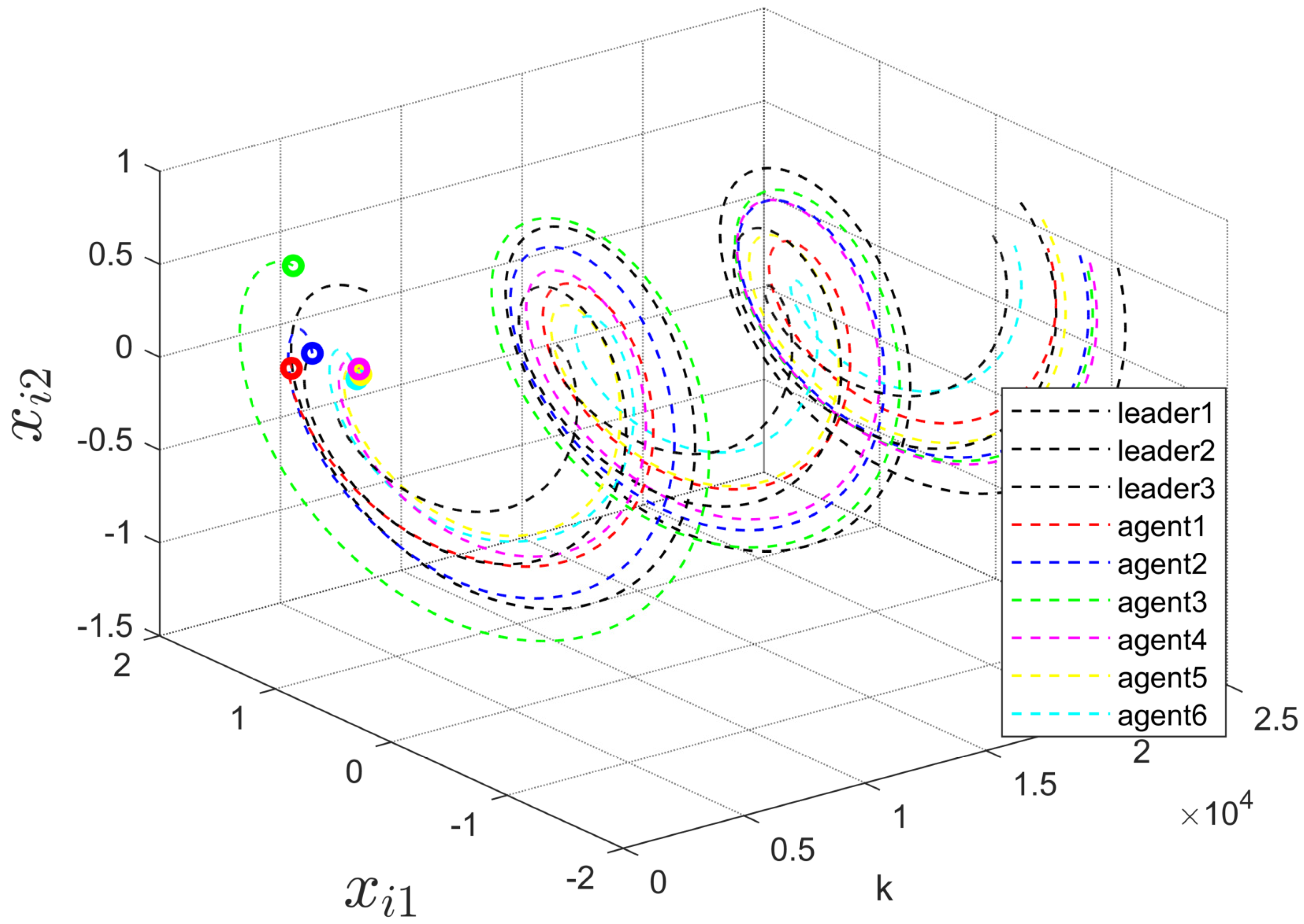
The three-dimensional effect diagram in Figure 4 clearly shows the movement trajectories of six agents and three leaders over time.
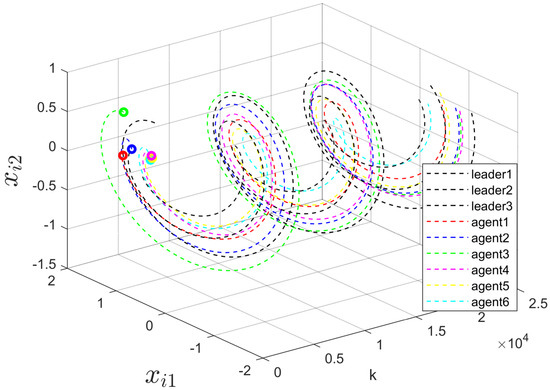
Figure 4.
The three−dimensional trajectories of all agents.
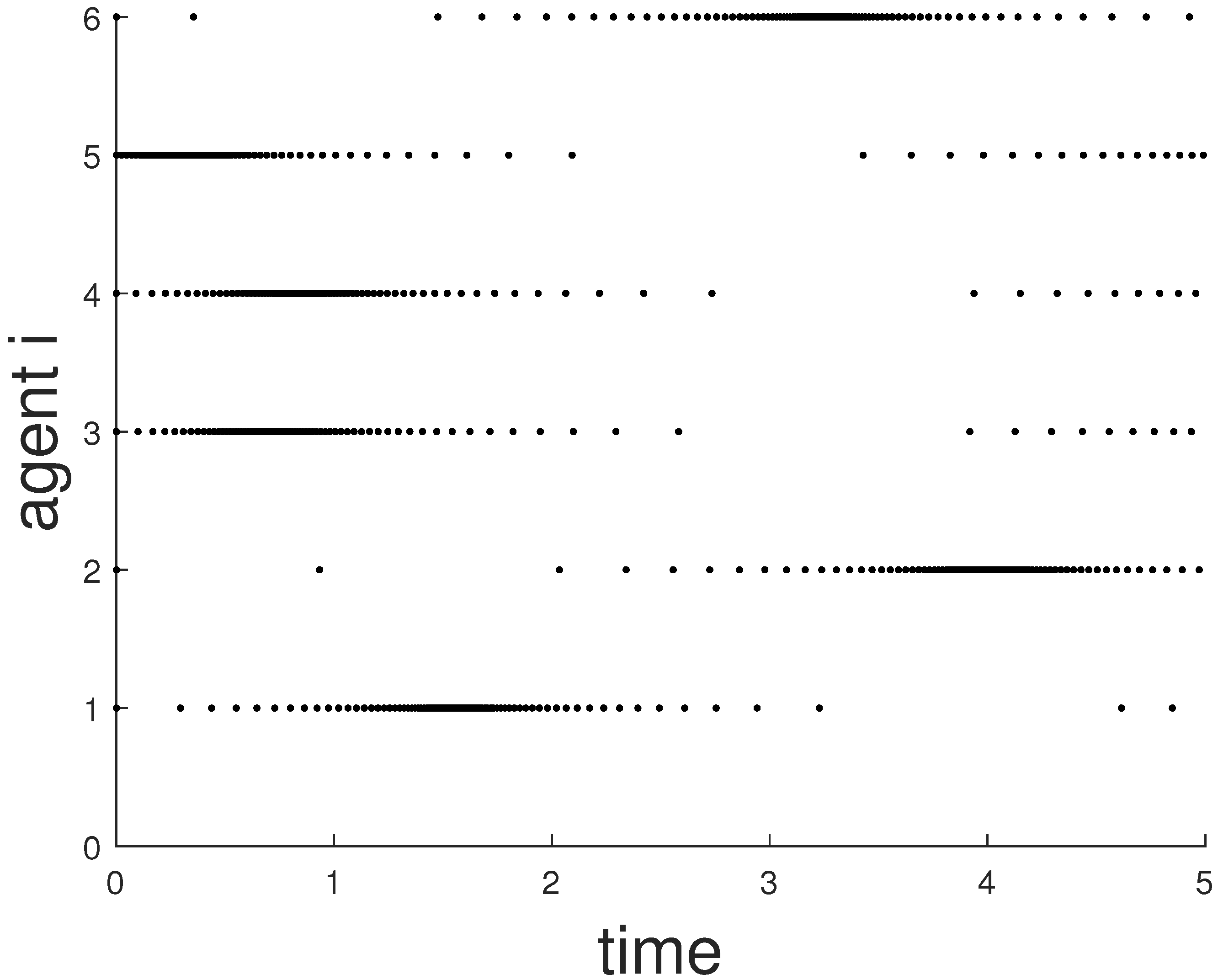
Moreover, the triggering instants of six followers can be found in Figure 5, which shows that the communication among agents is only carried out in some special instants.
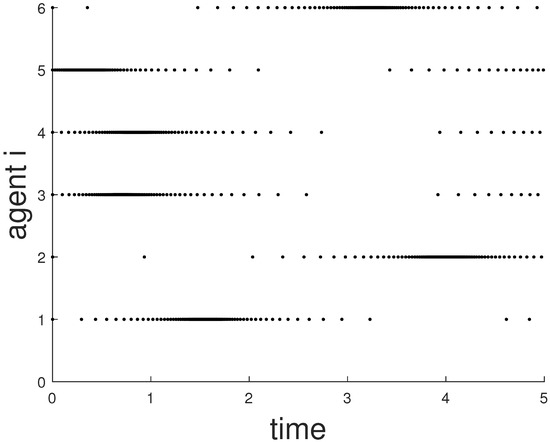
Figure 5.
Triggering time of each follower.
5. Conclusions
This paper targets a class of external disturbances with a known matrix system S. We propose a disturbance observer-based containment control algorithm that introduces a disturbance compensation term to offset the external disturbances. Additionally, combined with an event-triggered control strategy, the proposed method can effectively reduce the burden of communication and actuation. In particular, the design of the event-triggered function using an exponential function is independent of the number of nodes (which represents the scale of the network), does not require continuous communication, and eliminates Zeno behavior.
Author Contributions
Conceptualization, L.J.; methodology, L.J.; software, L.H.; validation, L.H.; writing—original draft preparation, L.H.; writing—review and editing, L.J. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported in part by the Fundamental Research Program of Shanxi Province 20210302124552 and in part by the National Natural Science Foundation of China (NSFC) under Grant No. 62103296.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
Author Long Jian was employed by Taiyuan Heavy Machinery Group Co. Ltd. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- OlfatiSaber, R.; Murray, R. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 9, 1520–1533. [Google Scholar] [CrossRef]
- Li, Z.; Duan, Z.; Chen, G.; Lin, H. Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint. IEEE Trans. Circuits Syst. I Regul. Pap. 2010, 1, 213–224. [Google Scholar]
- Hu, J.; Wu, Y.; Li, T.; Ghosh, B.K. Consensus control of general linear multi-agent systems with antagonistic interactions and communication noises. IEEE Trans. Autom. Control 2019, 5, 2122–2127. [Google Scholar] [CrossRef]
- Hu, J.; Hong, Y. Leader-following coordination of multi-agent systems with coupling time delays. Phys. A 2007, 2, 853–863. [Google Scholar] [CrossRef]
- Wu, Y.; Hu, J. Observer-based output regulation of cooperative-competitive high-order multi-agent systems. J. Frankl. Inst. 2018, 10, 4111–4130. [Google Scholar] [CrossRef]
- Li, Z.; Ren, W.; Liu, X.; Fu, M. Distributed containment control of multi-agent systems with general linear dynamics in the presence of multiple leaders. Int. J. Robust Nonlinear Control 2013, 5, 534–547. [Google Scholar] [CrossRef]
- Peng, Z.; Luo, R.; Hu, J.; Shi, K.; Nguang, S.K.; Ghosh, B.K. Optimal tracking control of nonlinear multi-agent systems using internal reinforce Q-learning. IEEE Trans. Neural Netw. Learn. Syst. 2022, 8, 4043–4055. [Google Scholar] [CrossRef]
- Kou, L.; Chen, Z.; Xiang, J. Cooperative Fencing Control of Multiple Vehicles for a Moving Target with an Unknown Velocity. IEEE Trans. Autom. Control 2021, 2, 1008–1015. [Google Scholar] [CrossRef]
- Cao, Y.; Stuart, D.; Ren, W.; Meng, Z. Distributed containment control for multiple autonomous vehicles with double-integrator dynamics: Algorithms and experiments. IEEE Trans. Control Syst. Technol. 2011, 4, 929–938. [Google Scholar] [CrossRef]
- Zhao, D.; Li, Y.; Li, S.; Cao, Z.; Zhang, C. Distributed event-triggered impulsive tracking control for fractional-order multiagent networks. IEEE Trans. Syst. Man Cybern. Syst. 2021, 7, 4544–4556. [Google Scholar] [CrossRef]
- Luo, L.; Mi, W.; Zhong, S. Adaptive consensus control of fractional multi-agent systems by distributed event-triggered strategy. Nonlinear Dyn. 2020, 2, 1327–1341. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, J.; Wu, H. Distributed adaptive mittag–leffler formation control for second-order fractional multi-agent systems via event-triggered control strategy. Fractal Fract. 2020, 7, 380. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhang, H.; Mu, Y.; Wang, Y. Cooperative Containment Control for Multiagent Systems With Reduced-Order Protocols. IEEE Trans. Cybern. 2023, 6, 3823–3831. [Google Scholar] [CrossRef]
- Bi, C.; Xu, X.; Liu, L.; Feng, G. Output containment control of heterogeneous linear multiagent systems with unbounded distributed transmission delays. IEEE Trans. Cybern. 2021, 8, 8157–8166. [Google Scholar] [CrossRef]
- Haghshenas, H.; Badamchizadeh, M.A.; Baradarannia, M. Containment control of heterogeneous linear multi-agent systems. Automatica 2015, 54, 210–216. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, L. Distributed average tracking for linear heterogeneous multi-agent systems with external disturbances. IEEE Trans. Netw. Sci. Eng. 2021, 4, 3491–3500. [Google Scholar] [CrossRef]
- Cheng, B.; Li, Z. Consensus disturbance rejection with event-triggered communications. J. Frankl. Inst. 2018, 2, 956–974. [Google Scholar] [CrossRef]
- Ruan, X.; Feng, J.; Xu, C.; Wang, J. Observer-based dynamic event-triggered strategies for leader-following consensus of multi-agent systems with disturbances. IEEE Trans. Netw. Sci. Eng. 2020, 4, 3148–3158. [Google Scholar] [CrossRef]
- Trinh, M.H.; Tran, Q.V.; Sun, Z.; Ahn, H.S. Disturbance observer-based matrix-weighted consensus. Int. J. Robust Nonlinear Control 2024, 34, 10194–10214. [Google Scholar] [CrossRef]
- Jia, W.; Wang, J. Distributed disturbance observer based consensus control for linear multi-agent systems with mismatched disturbances. J. Frankl. Inst. 2022, 359, 578–598. [Google Scholar] [CrossRef]
- Talebitooti, R.; Darvish Gohari, H.; Zarastvand, M.; Loghmani, A. A robust optimum controller for suppressing radiated sound from an intelligent cylinder based on sliding mode method considering piezoelectric uncertainties. J. Intell. Mater. Syst. Struct. 2019, 20, 3066–3079. [Google Scholar] [CrossRef]
- Rong, L.; Liu, X.; Jiang, G.; Xu, S. Event-Driven Multiagent Consensus Disturbance Rejection With Input Uncertainties via Adaptive Protocols. IEEE Trans. Syst. Man Cybern. Syst. 2022, 5, 2911–2919. [Google Scholar] [CrossRef]
- Ding, Z. Consensus Disturbance Rejection With Disturbance Observers. IEEE Trans. Autom. Control 2015, 9, 5829–5837. [Google Scholar] [CrossRef]
- Han, T.; Li, J.; Guan, Z.; Cai, C.; Zhang, D.; He, D. Containment control of multi-agent systems via a disturbance observer-based approach. J. Frankl. Inst. 2019, 5, 2919–2933. [Google Scholar] [CrossRef]
- Wu, Y.; Hu, J.; Xiang, L.; Liang, Q.; Shi, K. Finite-Time Output Regulation of Linear Heterogeneous Multi-Agent Systems. IEEE Trans. Circuits Syst. II Express Briefs 2022, 3, 1248–1252. [Google Scholar] [CrossRef]
- Hu, W.; Liu, L. Cooperative output regulation of heterogeneous linear multi-agent systems by event-triggered control. IEEE Trans. Cybern. 2016, 5, 105–116. [Google Scholar] [CrossRef]
- Wang, H.; Yu, W.; Ren, W.; Lu, J. Distributed adaptive finite-time consensus for second-order multiagent systems with mismatched disturbances under directed networks. IEEE Trans. Cybern. 2019, 3, 1347–1358. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Ren, W.; Yu, W.; Zhang, D. Fully distributed consensus control for a class of disturbed second-order multi-agent systems with directed networks. Automatica 2021, 132, 109816. [Google Scholar] [CrossRef]
- Wei, X.; Yu, W.; Wang, H.; Yao, Y.; Mei, F. An observer-based fixed-time consensus control for second-order multi-agent systems with disturbances. IEEE Trans. Circuits Syst. II Express Briefs 2019, 2, 247–251. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, D.; Wang, W. Distributed dynamic average consensus for nonlinear multi-agent systems in the presence of external disturbances over a directed graph. Inf. Sci. 2019, 479, 40–54. [Google Scholar] [CrossRef]
- Dimarogonas, D.V.; Frazzoli, E.; Johansson, K.H. Distributed event-triggered control for multi-agent systems. IEEE Trans. Autom. Control 2012, 5, 1291–1297. [Google Scholar] [CrossRef]
- Zhang, J.; Feng, G. Event-driven observer-based output feedback control for linear systems. Automatica 2014, 7, 1852–1859. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, H.; Zhang, K.; Cai, Y. Observer-Based Output Feedback Event-Triggered Adaptive Control for Linear Multiagent Systems Under Switching Topologies. IEEE Trans. Neural Netw. Learn. Syst. 2021, 12, 7161–7171. [Google Scholar] [CrossRef]
- Hu, W.; Liu, L.; Feng, G. Consensus of linear multi-agent systems by distributed event-triggered strategy. IEEE Trans. Cybern. 2016, 1, 148–157. [Google Scholar]
- Cheng, T.H.; Kan, Z.; Klotz, J.R.; Shea, J.M.; Dixon, W.E. Event-triggered control of multi-agent systems for fixed and time-varying network topologies. IEEE Trans. Autom. Control 2017, 10, 5365–5371. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, G.; Wang, Y.; Song, C. Distributed event-triggered control of multi-agent systems with combinational measurements. Automatica 2013, 2, 671–675. [Google Scholar] [CrossRef]
- Seyboth, G.S.; Dimarogonas, D.V.; Johansson, K.H. Event-based broadcasting for multi-agent average consensus. Automatica 2013, 1, 245–252. [Google Scholar] [CrossRef]
- Fan, Y.; Liu, L.; Feng, G.; Wang, Y. Self-triggered consensus for multi-agent systems with zeno-free triggers. IEEE Trans. Autom. Control 2015, 5, 2779–2784. [Google Scholar] [CrossRef]
- Peng, Z.; Luo, R.; Hu, J.; Shi, K.; Ghosh, B.K. Distibuted optimal tracking control of discrete-time multi-agent systems via event-triggered reinforcement learning. IEEE Trans. Circuits Syst. I Regul. Pap. 2022, 9, 3689–3700. [Google Scholar] [CrossRef]
- Jian, L.; Hu, J.; Wang, J.; Shi, K.; Peng, Z.; Yang, Y.; Huang, J. Distributed functional observer-based event-triggered containment control of multi-agent systems. Int. J. Control Autom. Syst. 2020, 5, 1094–1102. [Google Scholar] [CrossRef]
- Jian, L.; Lv, Y.; Li, R.; Kou, L.; Zhang, G. Distributed Disturbance Observer-Based Containment Control of Multi-Agent Systems via an Event-Triggered Approach. Mathematics 2023, 10, 2363. [Google Scholar] [CrossRef]
- Qian, Y.; Liu, L.; Feng, G. Output Consensus of Heterogeneous Linear Multi-Agent Systems with Adaptive Event-Triggered Control. IEEE Trans. Autom. Control 2018, 6, 2606–2613. [Google Scholar] [CrossRef]
- Yang, J.; Xiao, F.; Ma, J. Model-based edge-event-triggered containment control under directed topologies. IEEE Trans. Cybern. 2018, 7, 2556–2567. [Google Scholar] [CrossRef]
- Hu, J.; Zheng, W.X. Adaptive tracking control of leader-follower systems with unknown dynamics and partial measurements. Automatica 2014, 5, 1416–1423. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, H.; Cai, Y.; Li, W. Containment control of general linear multi-agent systems by event-triggered control mechanisms. Neurocomputing 2020, 7, 263–274. [Google Scholar] [CrossRef]
- Qian, Y.; Liu, L.; Feng, G. Distributed event-triggered adaptive control for consensus of linear multi-agent systems with external disturbances. IEEE Trans. Cybern. 2018, 5, 2197–2208. [Google Scholar] [CrossRef]
- Li, Z.; Duan, Z.; Ren, W.; Feng, G. Containment control of linear multi-agent systems with multiple leaders of bounded inputs using distributed continuous controllers. Int. J. Robust Nonlinear Control 2019, 5, 2101–2121. [Google Scholar] [CrossRef]
- Miao, G.; Cao, J.; Alsaedi, A.; Alsaadi, F.E. Event-triggered containment control for multi-agent systems with constant time delays. J. Frankl. Inst. 2017, 15, 6956–6977. [Google Scholar] [CrossRef]
- Hu, W.; Liu, L.; Feng, G. Output consensus of heterogeneous linear multi-agent systems by distributed event-triggered/self-triggered strategy. IEEE Trans. Cybern. 2017, 8, 1914–1924. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, D.; Peng, Z.; Liu, L.; Wang, S. Event-triggered control for containment maneuvering of second-order MIMO multi-agent systems with unmatched uncertainties and disturbances. Chin. J. Aeronaut. 2020, 11, 2959–2971. [Google Scholar] [CrossRef]
- Wu, Z.; Cheng, B.; Li, Z. Distributed adaptive tracking control for Lur’e systems with event-triggered strategy. IEEE Trans. Syst. Man. Cybern. Syst. 2019, 5, 3263–3269. [Google Scholar] [CrossRef]
- Cheng, B.; Lv, Y.; Li, Z.; Duan, Z. Discrete Communication and Control Updating in Adaptive Dynamic Event-Triggered Consensus. IEEE Trans. Autom. Control 2024, 69, 347–354. [Google Scholar] [CrossRef]
- Gao, L.; Lu, H.; Wang, J.; Yu, X.; Jiang, P.; Chen, F.; Li, H. Robust Distributed Average Tracking with Disturbance Observer Control. IEEE Trans. Netw. Sci. Eng. 2024; early access. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).