Abstract
This paper focuses on a two-component interacting system introduced by Popowicz, which has the coupling form of the Camassa–Holm and Degasperis–Procesi equations. Using distribution theory, single peakon solutions and several double peakon solutions of the system are described in an explicit expression. Moreover, dynamic behaviors of several types of double peakon solutions are illustrated through figures. In addition, the persistence properties of the solutions to the Popowicz system in weighted spaces is considered via a large class of moderate weights.
Keywords:
Camassa–Holm and Degasperis–Procesi equations; distribution theory; peakon–solutions; persistence property MSC:
35CO7; 35CO8; 37K40
1. Introduction
In this work, the following two-component interacting system [1]
which is first derived by Popowicz via generalization of the second Hamiltonian operator of the Degasperis–Procesi equation to the two-dimensional matrix operator is systematically investigated. The system can be regarded as a coupling between the Camassa–Holm (CH) and Degasperis–Procesi (DP) equations, which indicates the case of or of Equation (1), where it is reduced to the original CH equation [2] and DP equation [3], respectively. Moreover, their various properties are extensively studied here, including the local well-posedness [4,5], persistence properties of solutions [6,7,8,9], blow-up phenomenon and global strong solutions [10], and peakon solutions [11,12,13,14,15].
It has very recently become known that N-soliton solutions can be systematically studied by the Hirota bilinear method [16], by Riemann–Hilbert problems, particularly for higher-order integrable equations [17,18,19], and for reduced nonlocal integrable equations [20,21]. All this will help to understand nonlinear complex wave models, including nonlinear nonlocal integrable models. It should be noted that the peaked solitary wave solution was first obtained in the CH equation by Camassa and Holm [2], where c is the wave speed. They showed that it has peaked solitary wave solutions which have discontinuous first derivative at the wave peak, in contrast to the smoothness of most previously known species of solitary wave solutions; thus, these are called “peakons”. Subsequently, many researchers have found that peakons are a common physical phenomenon occurring in most nonlinear wave equations, and the idea has attracted wide attention; see [11,22,23] and related references.
Currently, the majority of reported works in the literature have dealt with the interaction system of the Popowicz Equation (1). At first, Popowicz speculated that it should be integrable. However, the authors of [24] provided strong evidence of the non-integrability of the system by performing a combination of a reciprocal transformation together with Painlevé analysis. On top of that, Fu, Qu, and Ma [25] considered the well-posedness and blow-up phenomena for the system when with . At the same time, Wang and Qin [26] obtained blow-up results for the system as well. Using the transport equations theory and the classical Friedrichs regularization method, Zhou [27] established the local well-posedness of the solutions for this system in nonhomogeneous Besov spaces with , which further improved upon the work in reference [25].
Although there are many works in the literature concerning the CH and DP equations, the N-peakon solutions and the persistence properties of the solutions for the Popowicz system in Equation (1) have been scarcely examined. Along these lines, the main purpose of this work is to precisely describe the dynamic behaviors of single peakon and double peakon solutions by providing figures for the system in Equation (1) and exploring a different perspective on the the CH and DP equations. Furthermore, the generalized persistence properties of the solutions were thoroughly studied in weighted spaces via a large class of moderate weights which extends the results of Brandolese [9] on the CH equation to the Popowicz system in Equation (1).
The outline of this work is as follows. In Section 2, single peakon and double peakon solutions of the system in Equation (1) are investigated. In Section 3, the persistence properties of the solutions for the system in Equation (1) in weighted spaces are derived. Finally, in Section 4, the main conclusions are drawn.
2. Peakon Solution
2.1. Single Peakon Solution
First, it was assumed that the single peakon solutions of Equation (1) are of the following form:
where , and represent the functions of t to be determined later. The first-order derivatives of Equation (2) do not exist at point ; thus, Equation (2) cannot satisfy the system of Equation (1) in the classical sense. However, using distribution theory, the expressions of and in the weak sense can be written as follows:
Solving the system of Equation (4), the following expression can be derived:
where are two arbitrary constants. Putting Equation (5) into Equation (2), the single peakon solution has the following form:
The single peakon solution Equation (6) is depicted in Figure 1. In the meantime, it can be seen that the amplitudes of are determined by the wave speed ; see Figure 1c,f.
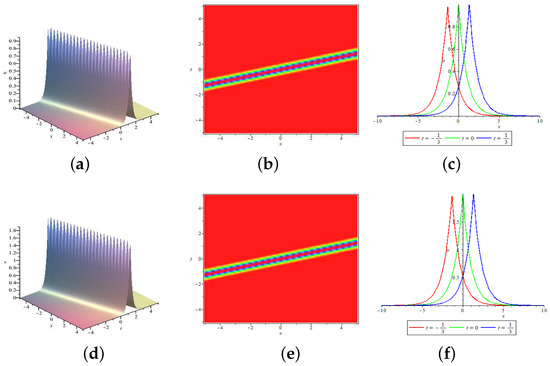
Figure 1.
(Color–Online) The single peakon Equation (6) for parameters and : (a,d) the 3D-polt of the solution with ; (b,e) the overhead view of the solution corresponding to (a,d) at different times shown in red, green and blue; (c,f) the wave propagation pattern of the solution along the axis corresponding to (a,d) shown in red, green and blue.
2.2. Double Peakons Solutions
Next, it was assumed that the double peakons solutions of the system (1) are of the following form
where , and are functions of t to be determined later. In addition, and have the following forms in the weak sense:
Substituting Equations (7) and (8) into Equation (1) and integrating through test functions yields the following dynamic systems:
and
Thus, it can be derived that
Assuming and combining the third and the fourth parts of Equation (10), the following expression applies:
According to the second Equation of (10), we can obtain the following expression:
To analyze the structure of the solution of the above ordinary differential equation, the following three cases are provided for discussion.
- (i)
- When , assuming , according to Equation (15) we obtainThus the first form of the double peakon solution Equation (7) is found.
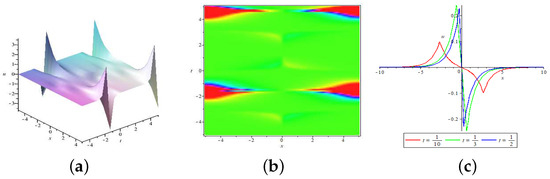 Figure 2. (Color–Online) The double peakon Equation (17) for parameters and : (a) the 3D plot of the solution with u; (b) the overhead view of the solution corresponding to (a) at different times shown in red, green and blue; (c) the wave propagation pattern of the solution along the axis corresponding to (a) shown in red, green and blue.
Figure 2. (Color–Online) The double peakon Equation (17) for parameters and : (a) the 3D plot of the solution with u; (b) the overhead view of the solution corresponding to (a) at different times shown in red, green and blue; (c) the wave propagation pattern of the solution along the axis corresponding to (a) shown in red, green and blue. - (ii)
- When , assuming , according Equation (15) we obtainTherefore, the second form of the double peakon solution Equation (7) can be found.
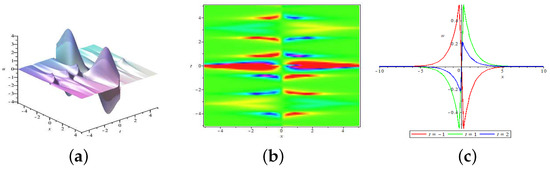 Figure 3. (Color–Online) The double peakon Equation (19) for parameters and : (a) the 3D plot of the solution with u; (b) the overhead view of the solution corresponding to (a) at different times shown in red, green and blue; (c) the wave propagation pattern of the solution along the axis corresponding to (a) shown in red, green and blue.
Figure 3. (Color–Online) The double peakon Equation (19) for parameters and : (a) the 3D plot of the solution with u; (b) the overhead view of the solution corresponding to (a) at different times shown in red, green and blue; (c) the wave propagation pattern of the solution along the axis corresponding to (a) shown in red, green and blue. - (iii)
- When , according Equation (15), we haveHence, the third form of the double peakon solution Equation (7) can be found.
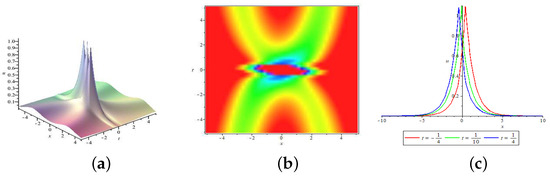 Figure 4. (Color–Online) The double peakon Equation (21) for parameters ; (a) the 3D plot of the solution with u; (b) the overhead view of the solution corresponding to (a) at different times shown in red, green and blue; (c) the wave propagation pattern of the solution along the axis corresponding to (a) shown in red, green and blue.
Figure 4. (Color–Online) The double peakon Equation (21) for parameters ; (a) the 3D plot of the solution with u; (b) the overhead view of the solution corresponding to (a) at different times shown in red, green and blue; (c) the wave propagation pattern of the solution along the axis corresponding to (a) shown in red, green and blue.
2.3. N-Peakon Solutions
Finally, it was assumed that the N-peakon solutions of the system Equation (1) are of the following form:
Substituting them into Equation (1), the dynamic system can be derived as follows:
Therefore, N-peakon solutions of Equation (1) can be established in the weak sense.
3. Persistence Property
In this section, the Cauchy problem of the interacting system in Equation (1) is considered
3.1. Weight Function
For convenience, standard definitions and lemmas concerning the weight function [9] are introduced below.
Definition 1.
A non-negative function is called sub-multiplicative if for all . A positive function φ is called ω-moderate if there exists a constant such that holds for all , where ω is a given sub-multiplicative function.
Lemma 1
(See Proposition 3.2 in [9]). φ is a ω-moderate weight function with constant if and only if the weighted Young estimate
holds for any two measurable functions and , where denotes the convolution .
Definition 2.
A positive function is called an admissible weighted function for the system of Equation (24) if it is a locally absolutely continuous function satisfying for some and if , φ is ω-moderate with a sub-multiplicative weight function ω satisfying
3.2. Persistence Property of the Interacting System
In the next moment, the persistence property in weighted spaces is extended to the interacting system of Equation (24) with the help of the admissible weighted function.
Theorem 1.
Remark 1.
The standard class examples of the application for admissible weighted functions can be found by taking the weight function
satisfying the conditions The original work introducing the persistence property of the CH equation can be found in [6] (exponential), [8] (algebraical), and [9] (weighted space).
Remark 2.
Let . Per Sobloev’s embedding theorem, we have
where is a positive constant.
Proof of Theorem 1.
, consider the following –truncation: Then, it is obvious that is a locally absolutely continuous function satisfying Multiplying the first equation in Equation (25) by and integrating over , we have
where depends only on , and . It follows that
Now, we can to find a similar estimate on . Differentiating by x the first Equation in (25), we have
Multiplying Equation (28) by and integrating over , we now have
where depends only on and R. It follows that
Multiplying Equation (31) by and integrating over , we have
It follows that
where depends only on and R. Combining this with Equations (27), (29), and (33),
where depends only on , and p. Note that f is –moderate; thus, per Lemma 1, we arrive at
Checking that in the weak sense, we obtai
Due to , we can estimate some term as follows:
Here depend on and the weight functions . Substituting Equations (35)–(40) into Equation (34), we obtain
where C depends on , and the weight functions . Per Gronwall’s inequality, we arrive at
Using a similar method for the second equation in Equation (25), we have
Due to , as for a.e , per the assumed conditions , for we obtain
Letting , due to the term being independent on p, the implication is that
This completes the proof of Theorem 1. □
Corollary 1.
In Theorem 1, when taking and leaving all other conditions the same, the following estimate satisfies
for all .
Corollary 2.
In Theorem 1, taking and leaving all other conditions the same, the following estimate satisfies
for all .
4. Conclusions
In this work, distribution theory was developed to investigate a two-component interacting system as introduced by Popowicz, whereby the cases of single peakon solutions, double peakon solutions, and multi-peakon solutions for the system were provided. It is worth noting that along with the various peakon solutions of the Popowicz system being derived, in this paper the persistence properties of the solutions in weighted spaces via a large class of moderate weights have been considered. The Popowicz system can additionally be considered as a coupling between the CH and DP equations. Therefore, further properties of this system should be investigated in future works, for example, the stability of peakons solutions.
Author Contributions
Conceptualization, Y.L. and C.Q.; methodology, Y.L. and C.Q.; software, Y.L. and C.Q.; validation, Y.L. and C.Q.; formal analysis, Y.L.; investigation, Y.L.; resources, Y.L.; data curation, Y.L.; writing—original draft preparation, Y.L. and C.Q.; writing—review and editing, Y.L. and C.Q.; visualization, Y.L. and C.Q.; supervision, Y.L.; project administration, Y.L.; funding acquisition, Y.L. and C.Q. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by by the Foundation of Anhui Provincial Education Department (Grant No. KJ2021ZD0136, KJ2021A1102, 2022AH040207, 2022zybj093), the Foundation of Suzhou University (Grant No. szxy2021ylzy01), and the Suzhou University Research Center for Dynamical Systems and Control (Grant No. 2021XJPT40).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Popowicz, Z. A 2-component generalization of the Degasperis-Procesi equation. J. Math. Phys. 2006, 39, 13717–13726. [Google Scholar] [CrossRef]
- Camassa, R.; Holm, D. An integrable shallow water equation with peaked solitons. Phys. Rev. Lett. 1993, 71, 1661–1664. [Google Scholar] [CrossRef] [PubMed]
- Degasperis, A.; Procesi, M. Asymptotic integrability. In Symmetry and Perturbation Theory; World Scientic: Singapore, 1999. [Google Scholar]
- Danchin, R. A note on well-posedness for Camassa-Holm equation. J. Differ. Equ. 2003, 192, 429–444. [Google Scholar] [CrossRef]
- Escher, J.; Lechtenfeld, O.; Yin, Z. Well-posedness and blow-up phenomena for the 2-component Camassa-Holm equation. Discret Contin. Dyn. Syst. 2007, 19, 493–513. [Google Scholar] [CrossRef]
- Himonas, A.; Misiolek, G.; Ponce, G.; Zhou, Y. Persistence properties and unique continuation of solutions of the Camassa-Holm equation. Comm. Math. Phys. 2007, 271, 511–522. [Google Scholar] [CrossRef]
- Tian, S. Asymptotic behavior of a weakly dissipative modifed two-component Dullin-Gottwald-Holm system. Appl. Math. Lett. 2018, 83, 65–72. [Google Scholar] [CrossRef]
- Ni, L.; Zhou, Y. A new asymptotic behavior of solutions to the Camassa-Holm equation. Proc. Am. Math. Soc. 2012, 140, 607–614. [Google Scholar] [CrossRef]
- Brandolese, L. Breakdown for the Camassa-Holm equation using decay criteria and persistence in weighted spaces. Int. Math. Res. Not. IMR 2012, 22, 5161–5181. [Google Scholar] [CrossRef]
- Constantin, A. Existence of permanent and breaking waves for a shallow water equation: A geometric approach. Ann. Inst. Fourier 2000, 50, 321–362. [Google Scholar] [CrossRef]
- Qiao, Z. A new integrable equation with cuspons and W/M-shape-peaks solitons. J. Math. Phys. 2006, 47, 112701. [Google Scholar] [CrossRef]
- Xia, B.; Qiao, Z.; Zhou, R. A synthetical two-component model with peakon solutions. Stud. Appl. Math. 2015, 135, 248–257. [Google Scholar] [CrossRef]
- Li, Y.; Za, Q. Multi-peakon solutions for two new coupled Camassa-Holm equations. Commun. Theor. Phys. 2016, 65, 677–683. [Google Scholar] [CrossRef]
- Yu, Z.; Zou, L. The Degasperis-Procesi equation with a strong dispersive term and its multi-Peakon solutions. Appl. Math. Lett. 2022, 134, 108356. [Google Scholar] [CrossRef]
- Dong, M.; Wang, Y.; Tian, L.; Wei, J. The peakon solutions of a new integrable Camassa Holm equation. Appl. Math. Lett. 2023, 141, 108603. [Google Scholar] [CrossRef]
- Ma, W. Soliton solutions by means of Hirota bilinear forms. Partial Differ. Equ. Appl. Math. 2022, 5, 100220. [Google Scholar] [CrossRef]
- Ma, W. Matrix integrable fourth-order nonlinear Schrödinger equations and their exact soliton solutions. Chin. Phys. Lett. 2022, 39, 100201. [Google Scholar] [CrossRef]
- Ma, W. Matrix integrable fifth-order mKdV equations and their soliton solutions. Chin. Phys. B 2023, 32, 020201. [Google Scholar] [CrossRef]
- Yang, J.; Tian, S. Riemann-Hilbert problem and dynamics of soliton solutions of the fifth-order nonlinear Schrödinger equation. Appl. Math. Lett. 2022, 128, 107904. [Google Scholar] [CrossRef]
- Ma, W. Soliton hierarchies and soliton solutions of type (−λ,λ) reduced nonlocal nonlinear Schrödinger equations of arbitrary even order. Partial Differ. Equ. Appl. Math. 2023, 7, 100515. [Google Scholar] [CrossRef]
- Ma, W. Soliton solutions to constrained nonlocal integrable nonlinear Schrödinger hierarchies of type (−λ,λ). Int. J. Geom. Methods Mod. Phys. 2023, 20, 2350098. [Google Scholar] [CrossRef]
- Palacios, J.M. Asymptotic stability of peakons for the Novikov equation. J. Differ. Equ. 2020, 269, 7750–7791. [Google Scholar] [CrossRef]
- He, C.; Liu, X.; Qu, C. Orbital stability of two-component peakons. Sci. China Math. 2023, 66, 1395–1428. [Google Scholar] [CrossRef]
- Hone, A.; Irle, M. On the non-integrability of the Popowicz peakon system, in Dynamical Systems and Differential Equations, Proc. 7th AIMS International Conference. Discret. Contin. Dyn. Syst. 2009, 2009, 359–366. [Google Scholar]
- Fu, Y.; Qu, C.; Ma, Y. Well-posedness and blow-up phenomena for the interacting system of the Camassa-Holm and Degasperis-Procesi equations. Discret. Contin. Dyn. Syst. 2010, 27, 1025–1035. [Google Scholar] [CrossRef]
- Wang, M.; Yu, S. An interacting system of the Camassa-Holm and Degasperis-Procesi equations. J. Math. Phys. 2012, 53, 063708. [Google Scholar] [CrossRef]
- Zhou, S. The local well-posedness in Besov spaces and non-uniform dependence on initial data for the interacting system of Camassa-Holm and Degasperis-Procesi equations. Monatsh Math. 2018, 187, 35–764. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).