Abstract
This article discusses the finite-time stability problem for stochastic genetic regulatory networks (SGRNs) with time-varying delays. By designing suitable adaptive controllers and skillfully choosing appropriate Lyapunov and multi-Lyapunov functions, respectively, the above non-switched and switched SGRNs can achieve finite time stability in probability. Superior to some existing controllers for GRNs, the above adaptive design procedures can reduce the dependence of the system parameters. Finally, two numerical simulation examples illustrate the effectiveness of the theoretical results.
Keywords:
stochastic genetic regulatory network; time-varying delay; adaptive control; finite-time stability in probability; switched topology MSC:
93E15; 92B05; 60H10; 92C42
1. Introduction
Gene regulatory networks (GRNs) have received considerable attention for their potential applications [1,2]. The GRNs actually act as a complex dynamical system and describe the regulatory mechanism of interactions among DNA, mRNA, and proteins of biological systems at a molecular level. The analysis of a gene regulatory network is not only an important way to understand and master the operating mechanism of cell life activities [1,3,4,5,6], but it also has broad application prospects in disease gene prediction, drug target screening, and other fields [7,8,9,10]. To this end, it is necessary and useful to present appropriate mathematical models to represent expression mechanisms and signal transduction ways. At present, the modeling approaches of GRNs generally include Boolean models, Bayesian models, differential equation models, etc. [11,12]. Among them, the two most widely used models are the Boolean models and differential equation models [13,14]. In particular, differential equations describe the concentration changes in proteins and mRNAs. This model is more accurate and can accurately describe the nonlinear dynamic behavior of biological systems, so it has attracted more attention [15,16,17,18].
On the one hand, gene expression is often affected by internal and external noise interference and environmental fluctuations, so the process of gene expression is a random process [19]. Moreover, this noise will inevitably affect the dynamic analysis of the network. Therefore, stochastic noise should be considered in the modeling of gene regulatory networks [20]. On the other hand, since the processes of the transcription and translation of proteins are slow in organisms, time delay is inevitable in modeling GRNs. Time delay plays a very important role in the dynamic behavior of gene regulatory networks, and some models without time delay may lead to the wrong results [21,22,23]. Recently, there have been many good results in the research into delayed gene regulatory networks [24,25,26,27,28,29,30,31]. Therefore, in this paper, we consider the stochastic genetic regulatory networks (SGRNs) with time-varying delays.
Furthermore, as a dynamic system, the stability analysis and regulation of GRNs are very important. The instability of protein and mRNA molecular concentrations can lead to fatal consequences [32,33]. So it is necessary to adjust the molecular concentration through external input to make the system reach a stable state. Recently, people have paid more attention to GRNs [34]. For the general network, not only is the study of the finite-time stability significant [35,36,37], but the finite-time control also has the advantages of high precision, strong robustness, and anti-interference ability [35,38]. When we consider the SGRNs, how do we define the stability of a system in finite time? In 2008, Mao et al. first proposed the finite-time stability theorems for stochastic differential equations [39]. Then, Yin et al. introduced a new definition of finite time stability for stochastic nonlinear systems (that is, finite time stability in probability) and presented a stochastic finite time theorem [40]. Compared with the stability in probability and asymptotic stability in probability, finite-time stability in probability has shown its advantage in control design because of the faster convergence, higher accuracy, and better disturbance rejection ability. Khoo ea al. obtained some sufficient conditions to ensure the finite-time stability in probability [41]. Then, Wang et al. dealt with the problem of finite time stabilization in probability for a class of high-order stochastic nonlinear systems in strict feedback form in 2015 [42]. Based on the above definitions and sufficient conditions in a stochastic nonlinear system, we study the finite time stability of SGRNs. With the help of the analyses of the stochastic nonlinear systems, the control and analysis of SGRNs have achieved remarkable developments in recent years [43,44,45,46,47]. These studies not only promote the development of finite-time stability in gene regulatory networks but also provide some research basis and ideas for our research on adaptive controller design. In 2018, Li et al. studied the problem of input-to-state stability for a class of switched neural networks with stochastic disturbance [45]. In 2019, Wang et al. considered the stability problem of uncertain GRN with time-varying delay and reaction–diffusion terms [46]. In 2021, Saravanan et al. discussed the finite-time stability of switched GRNs using Wirtinger’s integral inequality, a reciprocally convex combination technique [48]. The above literature has studied the stability of gene regulatory networks from the aspects of input-state stability, finite-time stability, etc., under the conditions of time delay, randomness, and switching. However, in the above discussion, we need to obtain the parameter information of the gene network, which may be obtained based on large numbers of experiments. This leads to a strong dependence on the precision of the experiments and instruments. In this paper, we consider the lowest amount of parameter information to design an appropriate controller, which can make the stochastic GRNs achieve finite-time stability.
Based on the above considerations, we design adaptive controllers under non-switched and switched SGRNs (which we denote as NSGRNs and SSGRNs, respectively) with time-varying delays, respectively, and give sufficient conditions of the finite-time stability in probability using the method of the Razumikhin theorem. The rest of the paper is organized as follows. The problem formulation and some preliminaries are given in Section 2. Section 3 presents the finite-time stability analysis for non-switched GRNs by designing adaptive controllers. In addition, the above adaptive design methods are extended to the case of switched GRNs, which is shown in Section 4. Then, two examples are provided to demonstrate the effectiveness of the obtained results; finally, Section 6 concludes the paper.
: denotes the set of all nonnegative real numbers, and denotes the real n-dimensional space. For a given vector or matrix X, denotes its transpose, denotes its trace when X is square, and is the Euclidean norm of a vector X. denotes the set of all functions with continuous partial derivatives; denotes the family of all nonnegative functions on , which are in x and in t; K denotes the set of all functions, , which are continuous, strictly increasing, and vanishing at zero; denotes the set of all functions, which are of K class and unbounded. denotes the expectation of the stochastic variable x, means the minimum of a and b, and means the maximum.
2. Problem Formulation and Some Preliminaries
Consider the following n-molecular species uncertain switched GRNs [46,47,48]:
where and are the state vectors and represent the concentration of mRNA and protein at time t.
, are the degradation rates of mRNA and protein, and is the translation rate, where , is a piecewise constant function depending on time t, which represents the switched signal. Specifying the index of the active subsystem, i.e., for , is the kth switched instant. are the time-varying delays with
where , and .
denotes the feedback regulation of proteins on the transcription of mRNAs, which is called SUM logic [1].
where
is the Hill coefficient, is a positive constant, and is the transcriptional rate of the factor j to i. Proceeding as in paper [47], can be rewritten as
where with the function . is an matrix with
with , and is the set of all repressers of gene i.
Let , be an unique equilibrium point of system (1). In the following, we shift the point , to the origin by letting . Therefore, the following system is established
where . Then, letting , the system (2) can be changed to
where
In this paper, we take extracellular noises and control items into account; then, the GRNs model (3) can be expressed as follows:
where , is a stand Wiener process defined in the complete probability space .
In order to conduct the stability analysis for systems (4), it is necessary to make the following assumptions and definitions.
Assumption 1.
For the system (4), the noise intensity matrices satisfy the following condition
where are positive constant and .
Definition 1
([39]). Consider the following stochastic system with time delays
For any given associated with above system, the differential operator is defined as
which is called as the Hassian term of .
In the following, we will design adaptive controllers for above system to achieve finite-time stability in probability. The exact definition of the finite-time stability in probability is as follows.
Definition 2
([39]). The trivial solution of system (4) is said to be finite-time stable in probability, if the equation admits a unique solution for any initial value , the following statements hold:
(i) Finite-time attractiveness in probability: For every initial value , the first time , which is called the stochastic settling time, is finite almost surely, that is, ;
(ii) Stability in probability: For every pair of and , there exists a such that
whenever .
3. Finite-Time Stability in Probability of Non-Switched SGRNs with Time-Varying Delay
In this section, our first goal is to design an adaptive controller that can make the system achieve finite-time stability in probability in non-switched cases, which can be seen as:
For system (5), the controller is designed as:
where , are constants, with positive definite matrix satisfying (8), and is the adaptive feedback gain with
and the initial values .
The definitions of and are given as:
where . Based on the above controller and definition, the following lemma will be given for the later use of derivations.
Lemma 1
Lemma 2
([40]). Let and . Assume that there exists a continuous function with such that, for any ,
Then, there exists a positive real constant T, such that
where T can be chosen as
Lemma 3
([49]). For the positive definite matrix in system (5) and a positive matrix , there exists a unique positive definite matrix satisfying
In general, we take as the unit matrix I.
Lemma 4
([49]). For the nonlinear function in system (5), there exists a constant , such that .
Lemma 5
([50]). Let . Given any positive real numbers c, d, and , then
Lemma 6
([50]). Let are constants, for any , then
Theorem 1.
Proof.
We construct
where . □
To begin, we show that there exist positive constants to satisfy . By taking the derivation of the given Lyapunov function with respect to t along the trajectory of system (5), we can obtain
Whenever satisfies for some . Then, we can conclude that
where , . It follows that , and it is apparent that V is decrementing with time t in probability. Taking the expectations of both sides, we have Taking into consideration, we can see that there exists a constant to satisfy . Therefore,
In the following, we give a constant then we can assume that there exist , so that . If not, we have
However, is bounded, which is a contradiction. Then, we obtain , when ; that is, . Then, we have
whenever .
Next, we will illustrate that the trivial solution of system (5) is finite-time stable in probability, which is similar to the proof method of Theorem 3.1 in reference [40]. Let and . Let . Applying formula and (13), we have Then,
Taking , we obtain that whenever . Letting , we derive , which is which completes the proof of (i) in Definition 2.
Without loss of generality, we only need to prove the required result when We define where . We set . For arbitrary , we have
On one hand, it is easily seen that
On the other hand, for any , we can derive that
Let . It is obvious that is strictly decreasing and converges to zero as . Combining (15)–(17), we obtain
Defining , we obtain from (17) that According to Lemma 2, we have
Then, we choose We can obtain a sequence , such that
From the definition of and as positive definite, we have . Let , and we obtain , which implies that , when . Then, we complete the proof of (ii) in Definition 2. The proof is complete.
Remark 1.
For SGRNs (5), we utilize a novel adaptive controller (6) to automatically adjust the feedback gains under the condition that some information in gene regulation cannot be obtained. Here, we do not need to know some of the parameter information in gene regulation, such as the value of the upper bound of ρ in the nonlinear part. Furthermore, when designing the controller, the controller gain is relatively large in the general method to ensure that the system can reach a stable state. However, in the adaptive case, the gain can automatically adjust over time and does not need to take all cases; so, the value is relativity small.
4. Finite-Time Stability in Probability of Switched SGRNs with Time-Varying Delays
In this section, we consider the switched situation, which can be seen as Formula (4). The controller for switched SGRNs is designed as
where , , are constants, and positive definite matrix satisfies Equation (8). is the adaptive feedback gain with
and the initial values .
Definition 3
([51]). For any , let represent the switch times on interval . If
holds for any given , then the constant is called the average dwell time, and is the chatter bound. As commonly used in the literature, we choose .
Lemma 7
([50]). For arbitrary real numbers , , we have
Theorem 2.
Proof.
Consider , , which, in this paper, we shorten to . Let and . We define . For , we consider . By Formulas (15) and (16), for arbitrary , we have
□
Next we will use mathematical induction to prove that . Since , which is , and from (24), we have
We assume that , whenever . Considering an arbitrary , we obtain
The next proofs are almost identical to Theorem 1, the major change being the substitution of for . Next, we prove it in simple steps. Since , together with the condition (i), we have
Taking , we obtain whenever . Letting , we derive , which implies that and we can obtain the stability in probability.
In the same way as Theorem 1, we define where . We set . The same as in (17),
whenever and . Letting , with Lemma 2, we obtain
As with (25), we also have
where . That is, Then, we see that the system can achieve finite-time attractiveness in probability. The proof is complete.
Theorem 3.
For a given controller (19) and the adaptive law (20), the switched SGRNs (4) are finite-time stable in probability, if the dwell time satisfies
where is the initial value of system (4), and , , . and denote the maximum and minimum eigenvalues of the positive definite matrix , respectively. , , and is a constant.
Proof.
It is easy to show that It follows that for each switching time . An argument similar to the analysis of Theorem 1 shows that and
where , and . In the formula, we note , , and define . Let Next, we discuss the stability of system (4) in two situations.
In the first case, , we can assume that is uniformly bounded in this case, which will be proved by mathematical induction.
For each , , we have First when , we prove the conclusion is right; that is , and . Using equation , we have
It follows that On account of Lemma 2, we have,
Since ; that is, , we obtain
With the condition , we obtain
and it follows that .
Second, we prove , and in section , when , and holds.
Based on the above assumptions, we have and in section . Then,
When , we have
It follows that .
It can be obtained by opening the power on both sides that That is,
In the second case, . If there exists a constant , such that , then
whenever . We take as the starting time, and the conclusion can be proved as above.
If not, for . With the adaptive law of , we know that is monotonically increasing and bounded with . Then, there exists a constant , such that . By the above analysis, we obtain
We take as the starting time, and in this case,
whenever , and the conclusion can be proved as above. Hence, the statements in Section 4 are proved in two cases. Then, we can obtain , when . This means that equation (29) always holds. Proceeding as in the proof of the non-switched GRNs (5), we have the finite-time stability in probability of the switched SGRNs (4).
5. Numerical Examples
In this section, two examples are provided to verify the effectiveness of the results obtained in the previous section.
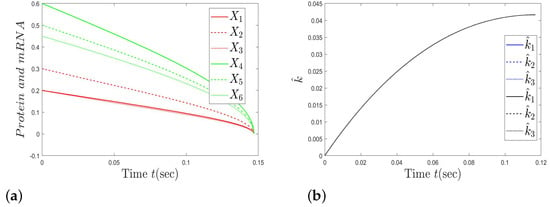
Example 1.
First, we consider a non-switched SGRN, and the relevant parameters are given as follows [43].
and . We take the regulatory function as and the time-varying delay is Then, from Equation (8), it can be concluded that the adaptive matrix
if we select . Then, the controller can be designed as with . The following state responses of the system (5) with adaptive controller (4) are shown in Figure 1, with the initial condition , .
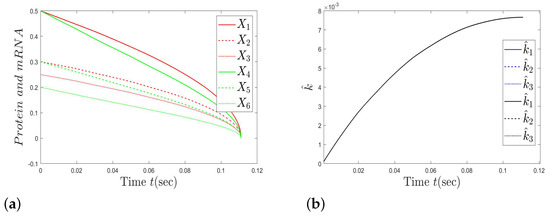
Example 2.
We consider a switched time-varying delay SGRN with two subsystems.
, , and We assume that
Then, from Equation (8), it can be concluded that the adaptive matrix
if we select . In the above system, we assume that the first subsystem switches to the second subsystem after 0.3 s, while the second subsystem switches to the first subsystem after 0.4 s. For the first subsystem, we select the corresponding controller with . For the second subsystem, the controller is with that .
6. Conclusions
In this paper, the problem of finite-time stability was investigated for a class of switched SGRNs with uncertainties and time-varying delay. In particular, adaptive controllers in non-switched and switched SGRNs were designed, and the sufficient conditions for the systems to achieve finite-time stability in probability were given by a nonlinear matrix inequality, the Razumikhin theorem, and several stochastic analytical techniques. It should be pointed out that the proposed controllers require only partial system information and can shorten the time required for the system to achieve stability. Finally, two simulation examples were given in support of the proposed control scheme.
Author Contributions
Conceptualization, F.L.; Formal analysis, H.G.; Methodology, L.W.; Project administration, P.W.; Writing—original draft, L.W.; All authors contributed to refining the ideas, carrying out additional analyses and finalizing this paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Alon, U. An Introduction to Systems Biology: Design Principles of Biological Circuits; CRC: London, UK, 2006. [Google Scholar]
- Wang, P. Network biology: Recent advances and challenges. Gene Protein Dis. 2022, 1, 101. [Google Scholar] [CrossRef]
- Somogyi, R.; Sniegoski, C. Modeling the complexity of genetic networks: Understanding multigenic and pleiotropic regulation. Complexity 1996, 1, 45–63. [Google Scholar] [CrossRef]
- Bruggeman, F.; Westerhoff, H. The nature of systems biology. Trends Microbiol. 2007, 15, 45–50. [Google Scholar] [CrossRef]
- Mendoza, E. Systems biology: Its past, present and potential. Philipp. Sci. Lett. 2009, 2, 16–34. [Google Scholar]
- Kitano, H. Systems biology: A brief overview. Science 2002, 295, 1662–1664. [Google Scholar] [CrossRef]
- Barabási, A.; Gulbahce, N.; Loscalzo, J. Network medicine: A network-based approach to human disease. Nat. Rev. Genet. 2011, 12, 56–68. [Google Scholar] [CrossRef]
- Hood, L.; Health, J.; Phelps, M.; Lin, B. Systems biology and new technologies enable predictive and preventative medicine. Science 2004, 306, 640–643. [Google Scholar] [CrossRef]
- Kirschner, M. The meaning of systems biology. Cell 2005, 121, 503–504. [Google Scholar] [CrossRef]
- Bi, Y.; Wang, P. Exploring drought-responsive crucial genes in Sorghum. iScience 2022, 25, 105347. [Google Scholar] [CrossRef]
- Thomas, R. Boolean formalization of genetic control circuits. J. Theor. Biol. 1973, 42, 563–585. [Google Scholar] [CrossRef]
- Wang, P.; Wang, D.; Lv, J. Controllability analysis of a gene network for Arabidopsis thaliana reveals characteristics of functional gene families. IEEE/ACM Trans. Comput. Biol. Bioinform. 2019, 16, 912–924. [Google Scholar] [CrossRef]
- Smolen, P.; Baxter, D.A.; Byrne, J.H. Mathematical modeling of gene networks. Neuron 2000, 26, 567–580. [Google Scholar] [CrossRef]
- Wang, P.; Zhang, Y.; Lv, J.; Yu, X. Functional characteristics of additional positive feedback in genetic circuits. Nonlinear Dyn. 2015, 79, 397–408. [Google Scholar] [CrossRef]
- Reznik, E.; Kaper, T.J.; Segrè, D. The dynamics of hybrid metabolic-genetic oscillators. Choas 2013, 23, 013132. [Google Scholar] [CrossRef]
- Kuznetsov, A.; Kárn, M.; Kopell, N. Synchrony in a populatin of hysteresis-based genetic oscillators. SIAM J. Appl. Math. 2004, 65, 392–425. [Google Scholar] [CrossRef]
- Gonze, D. Modeling the effect of cell division on genetic oscillators. J. Theor. Biol. 2013, 325, 22–33. [Google Scholar] [CrossRef]
- Lv, J.; Wang, P. Modeling and Analysis of Bio-Molecular Networks; Springer: Singapore, 2020. [Google Scholar]
- Swain, P.; Elowitz, M.; Siggia, E. Intrinsic and extrinsic contributions to stochasticity in gene expression. Proc. Natl. Acad. Sci. USA 2002, 99, 12795–12800. [Google Scholar] [CrossRef]
- Min, H.; Xu, S.; Zhang, B.; Ma, Q. Globally adaptive control for stochastic nonlinear time-delay systems with perturbations and its application. Automatica 2019, 102, 105–110. [Google Scholar] [CrossRef]
- Zhang, B.; Lam, J.; Xu, S. Stability analysis of distributed delay neural networks based on relaxed Lyapunov-Krasovskii functions. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 1480–1492. [Google Scholar] [CrossRef]
- Ma, Q.; Gu, K.; Choubedar, N. Strong stability of a class difference equations of continuous time and strctured singular value problem. Automatica 2018, 87, 32–39. [Google Scholar] [CrossRef]
- Wang, P.; Lv, J.; Yu, X. Colored noise induced bistable switch in the genetic toggle switch systems. IEEE/ACM Trans. Comput. Biol. Bioinform. 2015, 12, 579–589. [Google Scholar] [CrossRef]
- Ren, F.; Cao, J. Asymptotic and robust stability of genetic regulatory networks with time-varying delays. Neurocomputing 2008, 71, 834–842. [Google Scholar] [CrossRef]
- Wu, H.; Liao, X.; Guo, S.; Feng, W.; Wang, Z. Stochastic stability for uncertain genetic regulatory networks with interval time-varying delays. Neurocomputing 2009, 72, 3263–3276. [Google Scholar] [CrossRef]
- Yao, Y.; Liang, J.; Cao, J. Stability analysis for switched genetic regulatory networks: An average dwell time approach. J. Frankl. Inst. 2011, 348, 2718–2733. [Google Scholar] [CrossRef]
- Zhou, J.; Xu, S.; Shen, H. Finite-time robust stochastic stability of uncertain stochastic delayed reaction—Diffusion genetic regulatory networks. Neurocomputing 2011, 74, 2790–2796. [Google Scholar] [CrossRef]
- Liu, A.; Yu, L.; Zhang, D.; Zhang, W. Finite-time H∞ control for discrete-time genetic regulatory networks with random delays and partly unknown transition probabilities. J. Frankl. Inst. 2013, 350, 1944–1961. [Google Scholar] [CrossRef]
- Li, L.; Zhen, X.; Bing, H. Non-uniform sampled-date control for stachastic passivity and passification of Markov jump genetic regulatory networks with time-varying delays. Neurocomputing 2016, 171, 434–443. [Google Scholar]
- Ali, M.S.; Saravanan, S. Finite-time stability for memristor based switched neural networks with time-varying delays via average dwell time approach. Neurocomputing 2018, 275, 1637–1649. [Google Scholar] [CrossRef]
- Xue, H.; Xu, X.; Zhang, J.; Yang, X. Robust stability of impulsive switched neural networks with multiple time delays. Appl. Math. Comput. 2019, 359, 456–475. [Google Scholar] [CrossRef]
- Wang, P.; Lü, J. Control of genetic regulatory networks: Opportunities and challenges. Acta Autom. Sin. 2013, 39, 1969–1979. [Google Scholar] [CrossRef]
- Wu, L.; Wang, P.; Lü, J. Substrate concentration effect on gene expression in genetic circuits with additional positive feedback. Sci. China Technol. Sci. 2018, 61, 1175–1183. [Google Scholar] [CrossRef]
- Qiu, J.; Sun, K.; Yang, C.; Chen, X.; Chen, X.; Zhang, A. Finite-time stability of genetic regulatory networks with impulsive effects. Neurocomputing 2017, 219, 9–14. [Google Scholar] [CrossRef]
- Bhat, S.; Bernstein, D. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Xu, J.; Sun, J. Finite-time filtering for discrete-time linear impulsive systems. Signal Process. 2012, 92, 2718–2722. [Google Scholar] [CrossRef]
- Xu, J.; Sun, J. Finite-time stability of nonlinear switched impulsive systems. Int. J. Syst. Sci. 2013, 44, 889–895. [Google Scholar] [CrossRef]
- Yu, S.; Long, X. Finite-time consensus for second-order multi-agent systems with disturbances by integral sliding mode. Automatica 2015, 54, 158–165. [Google Scholar] [CrossRef]
- Mao, X. Stochastic Differential Equations and Applications; Woodhead Publishing: Sawston, UK, 2008. [Google Scholar]
- Yin, J.; Khoo, S.; Man, Z.; Yu, X. Finite-time stability and instability of stochastic nonlinear systems. Automatica 2011, 47, 2671–2677. [Google Scholar] [CrossRef]
- Khoo, S.; Yin, J.; Man, Z.; Yu, X. Finite-time stabilization of stochastic nonlinear systems in strict-feedback form. Automatica 2013, 49, 1403–1410. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, Q. Finite-time stabilization of high-order stochastic nonlinear systems in strict-feedback form. Automatica 2015, 54, 284–291. [Google Scholar] [CrossRef]
- Yin, L. Finite-time stability analysis of switched genetic regulatory networks. J. Appl. Math. 2014, 2014, 730292. [Google Scholar] [CrossRef]
- Li, Q.; Shen, B.; Liu, Y.; Alsaadi, F. Event-triggered H∞ state estimation for discrete-time stochastic genetic regulatory networks with Markovian jumping parameters and time-varying delays. Neurocomputing 2016, 174, 912–920. [Google Scholar] [CrossRef]
- Li, C.; Lian, J.; Wang, Y. Stability of switched memristive neural networks with impulse and stochastic disturbance. Neurocomputing 2018, 275, 2565–2573. [Google Scholar] [CrossRef]
- Wang, W.; Dong, Y.; Zhong, S.; Liu, F. Finite-time ruost stability of uncertain genetic regulatory networks with time-varying delays and reaction-diffusion terms. Complexity 2019, 2019, 8565437. [Google Scholar]
- Wu, L.; Liu, K.; Lü, J.; Gu, H. Finite-time adaptive stability of gene regulatory networks. Neurocomputing 2019, 338, 222–232. [Google Scholar] [CrossRef]
- Saravanan, S.; Ali, M.S.; Rajchakit, G.; Hammachukiattikul, B.; Priya, B.; Thakur, G.K. Finite-time stability analysis of switched genetic regulatory networks with time-varying delays via wirtinger’s integral inequality. Complexity 2021, 2021, 9540548. [Google Scholar] [CrossRef]
- Liu, K.; Wu, L.; Lü, J.; Zhu, H. Finite-time adaptive consensus of a class of multi-agent systems. Sci. China Technol. Sci. 2016, 59, 22–32. [Google Scholar] [CrossRef]
- Huang, X.; Lin, W.; Yang, B. Global finite-time stabilization of a class of uncertain nonlinear systems. Automatica 2005, 41, 881–888. [Google Scholar] [CrossRef]
- Xiang, W.; Xiao, J.; Iqbal, M. Robust observer design for nonlinear uncertain switched systems under asynchronous switching. Nonlinear Anal. Hybrid Syst. 2012, 6, 754–773. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).