2. Runge–Kutta Pairs of Orders Eight and Seven
If the coefficient parameters in
A,
w,
, and
c fulfill certain algebraic criteria, an RK pair of order
is formed. A set of nonlinear equations describes these conditions. This system’s general (parametric) solution is known only for orders up to five. However, no practical application has been discovered for Cassity’s fifth-order families of approaches discussed in [
4]. Only specific families of this system’s general solution are known for higher order approaches.The more free nodes
,
,
there are, the easier it is to locate individual pairings of these families that meet specific design requirements. These nonstiff problem criteria are concerned with the reduction in certain truncation error coefficients measure, and for mildly stiff issues with maximizing the stability region.
Since (
1) is a system, we may embed independent variable
x in
and consider only autonomous systems
. When used to an autonomous system of differential equations, a Runge–Kutta method is said to be of algebraic order
p if and only if
where
is the set of
i-th order (rooted) trees and
,
are integral functions of
(symmetry and density function, respectively, in the terminology introduced by Butcher [
5]) and
X is a certain composition of
A,
w,
c (in case of the lower order formula replace with
). In the following the symbol
denotes a vector with elements all the elements of the set
in some arbitrary order.
In the case of a
pair, Equation (
2) is expanded in 200 nonlinear algebraic equations that must be satisfied by its higher order method and another 85 equations by its lower order method as shown in
Table 1. For a list of these equations see for example Fehlberg [
6]. A more comprehensive study with symbolic code for fast derivation of the equations of condition is given in [
7]. The simplifying assumption
is fulfilled in every RK method with perhaps the only exception being the Runge–Kutta–Oliver methods introduced in [
8] and studied further in [
9].
The minimal number of stages required for the construction of a
pair is 13 (i.e., hereafter
) and such a method offers only 104 parameters in view of (
3). Because the number of unknowns is much fewer than the number of equations, and especially because some of the latter equations are significantly nonlinear with respect to the components of
A, certain simplifying assumptions must be used to their solution.
Fehlberg was the first to construct such a pair; his pair has the disadvantage of producing identically zero error estimates for quadrature situations
in Equation (
1). This defect comes after the seventh-order formula satisfies the eighth-order condition
.
In the following, whenever
c is a vector, we represent componentwise multiplication by
(assuming
). For this multiplication (called Hadamard multiplication) we admit lower order of precedence over the conventional dot product. We define
and we use the notation
for vector
c but with its first
elements dropped. Accordingly, we use the notation
for the vector containing the elements of
c beginning from index
i through
j. When applying these notations to a relation, it is assumed that it applies to both sides. See [
10] for details in the issues described in this paragraph.
Various authors derived RK8(7) pairs after Fehlberg avoiding the quadrature defect; in chronological order, Verner [
11], Prince and Dormand [
12], Papakostas [
13], Papakostas and Tsitouras [
3,
14], and Verner [
15,
16,
17]. These pairs generally obey the following simplifying assumptions
We additionally employ
with
the identity matrix and
the vector with zero components.
Then we experience a severe reduction in the number of equations to be satisfied. In addition some elementary subsidiary equations can be solved instead—see the algorithm below for details.
The authors mentioned above gave some general lines of how to construct various types of embedded methods in a range of orders. A straightforward and explicit algorithm for the derivation of embedded methods of orders eight and seven is presented below.
Then we choose arbitrarily the coefficients
with the nodes being distinct from each other and at least one of
different from zero. The rest coefficients are found successively by the algorithm given below.
Set
Solve , for .
Solve , for .
Then all the remaining coefficients of matrix A are linearly depended on the following 56 equations and can be derived by solving directly the corresponding linear system.
Solve , , ,
, , ,
, , ,
, , ,
for the remaining coefficients from matrix A.
Next we provide a Mathematica package that implements the algorithm above. The following listing is 100% error free and is copied directly from the actual file.
(*----------------------------------------------------------------------------------------*)
BeginPackage["T87‘"];
Clear["T87‘*"];
T87::usage="T87[c2,c5,c6,c7,c8,c10,c11,a87,w13,ww12,ww13]
returns the coefficients matrices a,w,ww,c
of RK embedded pair of orders 8(7)"
Begin["‘Private‘"];
Clear["T87‘Private‘*"];
T87[c2_,c5_,c6_,c7_,c8_,c10_,c11_,a87_,w13_,ww12_,ww13_]:=
Module[ {c, c3, c4, c9, w, ww, e, a, w1, w6, w7, w8, w9, w10, w11, w12, ww1, ww6, ww7, ww8,
ww9, ww10, ww11, ae, ac, ac2, ac3, cc, ii, baci, bbaci, a32, a43, a53, a54, a64, a65, a74,
a75, a76, a84, a85, a86, a94, a95, a96, a97, a98, a104, a105, a106, a107, a108, a109, a114,
a115, a116, a117, a118, a119, a1110, a124, a125, a126, a127, a128, a129, a1210, a1211, a134,
a135, a136, a137, a138, a139, a1310, a1311, a21, a31, a41, a51, a61, a71, a81, a91, a101,
a111, a121, a131},
c = {0, c2, c3, c4, c5, c6, c7, c8, c9, c10, c11, 1, 1};
w = {w1, 0, 0, 0, 0, w6, w7, w8, w9, w10, w11, w12, w13};
ww = {ww1, 0, 0, 0, 0, ww6, ww7, ww8, ww9, ww10, ww11, ww12, ww13};
e = {1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1};
a = {{0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{a21, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{a31, a32, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{a41, 0, a43, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{a51, 0, a53, a54, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{a61, 0, 0, a64, a65, 0, 0, 0, 0, 0, 0, 0, 0},
{a71, 0, 0, a74, a75, a76, 0, 0, 0, 0, 0, 0, 0},
{a81, 0, 0, a84, a85, a86, a87, 0, 0, 0, 0, 0, 0},
{a91, 0, 0, a94, a95, a96, a97, a98, 0, 0, 0, 0, 0},
{a101, 0, 0, a104, a105, a106, a107, a108, a109, 0, 0, 0, 0},
{a111, 0, 0, a114, a115, a116, a117, a118, a119, a1110, 0, 0, 0},
{a121, 0, 0, a124, a125, a126, a127, a128, a129, a1210, a1211, 0, 0},
{a131, 0, 0, a134, a135, a136, a137, a138, a139, a1310, a1311, 0, 0}};
c9 = (14*c6^2*(7*c7^2*c8 + c7*(7*c8^2 - 12*c8 + 1) + c8) + c6*(14*c7^2*(7*c8^2 - 12*c8 + 1)
- 7*c7*(24*c8^2 - 33*c8 + 4) + 14*c8^2 - 28*c8 + 3) + 14*c7^2*c8
+ c7*(14*c8^2 - 28*c8 + 3) + 3*c8)/
(2*(7*c6^2*(7*c7^2*(15*c8^2 - 10*c8 + 2) - 2*c7*(35*c8^2 - 26*c8 + 6)
+ 14*c8^2 - 12*c8 + 3) - 7*c6*(2*c7^2*(35*c8^2 - 26*c8 + 6)
- c7*(52*c8^2 - 42*c8 + 11) + 12*c8^2 - 11*c8 + 3) + 7*c7^2*(14*c8^2 - 12*c8 + 3)
- 7*c7*(12*c8^2 - 11*c8 + 3) + 21*c8^2 - 21*c8 + 6));
c3 = (3*c2)/2; c4 = (9*c2)/4; a32 = (9*c2)/8; a43 = (27*c2)/16;
{w1, w6, w7, w8, w9, w10, w11, w12} =
Solve[{w.e == 1, w.c == 1/2, w.c^2 == 1/3, w.c^3 == 1/4, w.c^4 == 1/5,
w.c^5 == 1/6, w.c^6 == 1/7, w.c^7 == 1/8},
{w1, w6, w7, w8, w9, w10, w11, w12}][[1, All, 2]];
{ww1, ww6, ww7, ww8, ww9, ww10, ww11} =
Solve[{ww.e == 1, ww.c == 1/2, ww.c^2 == 1/3, ww.c^3 == 1/4, ww.c^4 == 1/5,
ww.c^5 == 1/6, ww.c^6 == 1/7},
{ww1, ww6, ww7, ww8, ww9, ww10, ww11}][[1, All, 2]];
ae = a.e - c; ac = a.c - c^2/2; ac2 = a.c^2 - c^3/3; ac3 = a.c^3 - c^4/4;
cc = DiagonalMatrix[c]; ii = IdentityMatrix[13];
baci = w.(a + cc - ii); bbaci = ww.(a + cc - ii);
{a53, a54, a64, a65, a74, a75, a76, a84, a85, a86, a94, a95, a96, a97, a98, a104, a105,
a106, a107, a108, a109, a114, a115, a116, a117, a118, a119, a1110, a124, a125, a126, a127,
a128, a129, a1210, a1211, a134, a135, a136, a137, a138, a139, a1310, a1311} =
Solve[ Join[(w.(cc - ii).a)[[4 ;; 5]], (w.(cc - ii).(cc - ii).a)[[4 ;; 5]], ac[[5 ;; 12]],
ac2[[5 ;; 12]], ac3[[7 ;; 13]], baci[[4 ;; 10]], bbaci[[4 ;; 8]],
{(ww.(cc - ii).a)[[4]], -(1/35) + w.(c a.c^4), -(1/40) + w.(c^2 a.c^4),
-(1/48) + w.(c a.c^5), -(1/35) + ww.(c a.c^4)}] == Array[0 &, 44],
{a53, a54, a64, a65, a74, a75, a76, a84, a85, a86, a94, a95, a96, a97, a98, a104, a105,
a106, a107, a108, a109, a114, a115, a116, a117, a118, a119, a1110, a124, a125, a126, a127,
a128, a129, a1210, a1211, a134, a135, a136, a137, a138, a139, a1310, a1311}][[1, All, 2]];
{a21, a31, a41, a51, a61, a71, a81, a91, a101, a111, a121, a131} =
Simplify[Solve[ae[[2 ;; 13]] == Array[0 &, 12],
{a21, a31, a41, a51, a61, a71, a81, a91, a101, a111, a121, a131}][[1, All, 2]]];
Return[{a,w,ww,c}];
End[];
EndPackage[]];
(*----------------------------------------------------------------------------------------*)
We spend about 0.01s for derivation of the coefficients (e.g., for PD8(7) given in [
12]) after typing
In[1]:=T87[1/18,5/16,3/8,59/400,93/200,13/20,1201146811/1299019798,
-180193667/1043307555,1/4,2/45,0]
The coefficients of PD87 listed in [
12] are continued fraction approximations accurate to only 18 significant digits. Here we used a version of the coefficients accurate to 34 significant digits after properly chopping the coefficients found exactly above (i.e., as
Out[1]).
3. On Derivation of a New Runge–Kutta Pair of Orders Eight and Seven
PD87 [
12] and DVERK78 [
17] are among the dominant pairs of their kind and are commonly used for higher accuracy computations. Their main advantage is the minimal truncation error coefficients norm
, i.e., the Euclidean norm of the 286 error coefficients of ninth order (see
Table 1). A little later, Verner presented a more robust pair [
18], which is implemented in Mathematica function
NDSolve [
19]. We name this pair DVERK78b and its coefficients can be retrieved (for use in quad-precision) easily by typing
In[2]:=NDSolve‘EmbeddedExplicitRungeKuttaCoefficients[8,34]
The minimization of the Euclidean norm is our main task here. Traditionally, we try also to keep the magnitude of the coefficients low when using double precision arithmetic (i.e., about 16 decimal digits). Then, a coefficient of size along with tolerance would cause a severe test in the margins of available digits; however, in quadruple precision, we may admit these large coefficients even for tolerances as low as about . Thus, we may proceed in a new minimization process allowing the coefficients to grow.
In order to accomplish this we use the differential evolution (DE) technique [
20]. DE is an iterative procedure; in every iteration, named generation
g, we work with a “population” of individuals. i.e., here the free parameters form the decades
with
N the population size. An initial population
is randomly created in the first step of the method. Thus, at first we form a fitness function that evaluates
. Following that, the fitness function is assessed for each member in the initial population. A three-phases sequential approach updates all of the persons participating in each iteration (generation)
g. Differentiation, crossover, and selection are the phases involved. For the latter method, we utilized MATLAB [
21] Software DeMat [
22]. A MATLAB version of the algorithm is implemented for this purpose.
Among the various decades we obtained by the technique applied, we concluded the following coefficients that are given in Mathematica format to ensure that are error free. The following coefficients are ready for use with build-in function NDSolve.
In[2]:=T87evec= {10839870895445/185203278486104297,0,0,0,0,70876466420204/75470597442438275,
-16496614726651/75468957694148719,54859577937538923405/14355606386435513,
17895137500075704819/2362101251104030,-969063659258770673/19161965088242370,
-39193463899416576680/3455993185375433,-973424986199410385/155592419305288032,16491/120125}/10;
T87cvec= {3102/110773,41448895555141/353624691619188,41448895555141/235749794412792,
49442/119883,51187/105369,61011/376738,77114/79499,147909751614626799/152923788158104127,
74279/78046,72043/74409,1,1};
T87amat={ {3102/110773},
{-17033458900934993/132978864382888258,17659313382611255/71989792689293837},
{41448895555141/942999177651168,0,41448895555141/314333059217056},
{33544131897542527/99303639017753176,0,-123806032279621065/100880451772826828,
80881552191452041/62126727673226683},
{3901178494518027/70202052982346435,0,0,12244602153330846/48744104078022083,
11363782051482252/63479278340035273},
{7281184019796491/108906123149933189,0,0,8912953764743186/75237479424494327,
-1193193435755019/24043824215671157,3001381510813201/114340525306552991},
{-297808918551351805/103302384399153762,0,0,-2387409947307450796/38235137422988677,
-320655295147743895/172685972706995386,266830735262229145/73369592821183637,8174527/126711},
{-312230898179118543/111335375555652709,0,0,-5921685522031592717/97516557935639304,
-122516042059134140/66440638491697461,143089054978597281/39930960285352934,
1966780853930863533/31340008936176199,27204097600957/30119714219091834},
{-497327926559154029/208366132906665209,0,0,-2070519061247416919/40105304012179956,
-139926368413626755/79789745208684688,436822604663916242/133157501626893287,
4951999978536596383/92678477827402881,-1662171172972759/32043786293542537,
320510318790859/5467452906511140},
{-267997292446794835/94625648159795289,0,0,-1326916430444389167/21635054137957163,
-50510473210813287/27322222661367848,680595213260915461/188925642391189177,
1090597603926315985/17207867085312708,-818226826952911/56758278493554744,
794276136679319/44163223221855014,-495594365453263/165024671142376612},
{-286074472550848766/70568381571246193,0,0,-2666282586603439301/29766446888618900,
-394981932622811234/181671027945865139,354437914440687571/72293255173230666,
1737172167669457231/18855481952627537,-1908527156826626453/17978177470082379,
14359180611877865064/20075894067162869,-1863006586402493967/31715262582627044,
-5146117877451253921/9346764321565133},
{-2286460617615599450/148215689608432541,0,0,-21511651826330234931/52669819756106150,
-949790098629780736/69310896259636617,2488552272190713800/64326656295428697,
14577683994864478388/35463253730030943,-34626716477448076238/6579786536866391,
267076469802229885930/7436961774107587,-15666088518007151408/5323429123670105,
-39614246945332388915/1429199330541022,0}};
T87bvec= {959469921003535/20735873900418433,0,0,0,0,83661087663817387/226096222469839182,
228743606234324881/883020026679163794,3544120671195926375/8063503515187523,
164403934540876/64548125027903185,1872154679941434671/50440600905843744,
-3908844507545666995/8324248434152054,-402658040159189839/58491143516062232,16491/120125};
T87Coefficients[8,p_]:=N[{T87amat,T87bvec,T87cvec,T87evec},p];
MATLAB furnished the free coefficients in double precision (see, e.g., , etc., in vector T87cvec). Considering these free coefficients as exact, we were able to extract the rest coefficients in quadruple precision as listed above.
Another issue that is interesting when dealing with (
1) is the existence of large stability intervals. For the eighth order formula (which the solution propagated) we form the polynomial
There is no need to add the term since and in consequence . The real stability interval has the form with and holds for all .
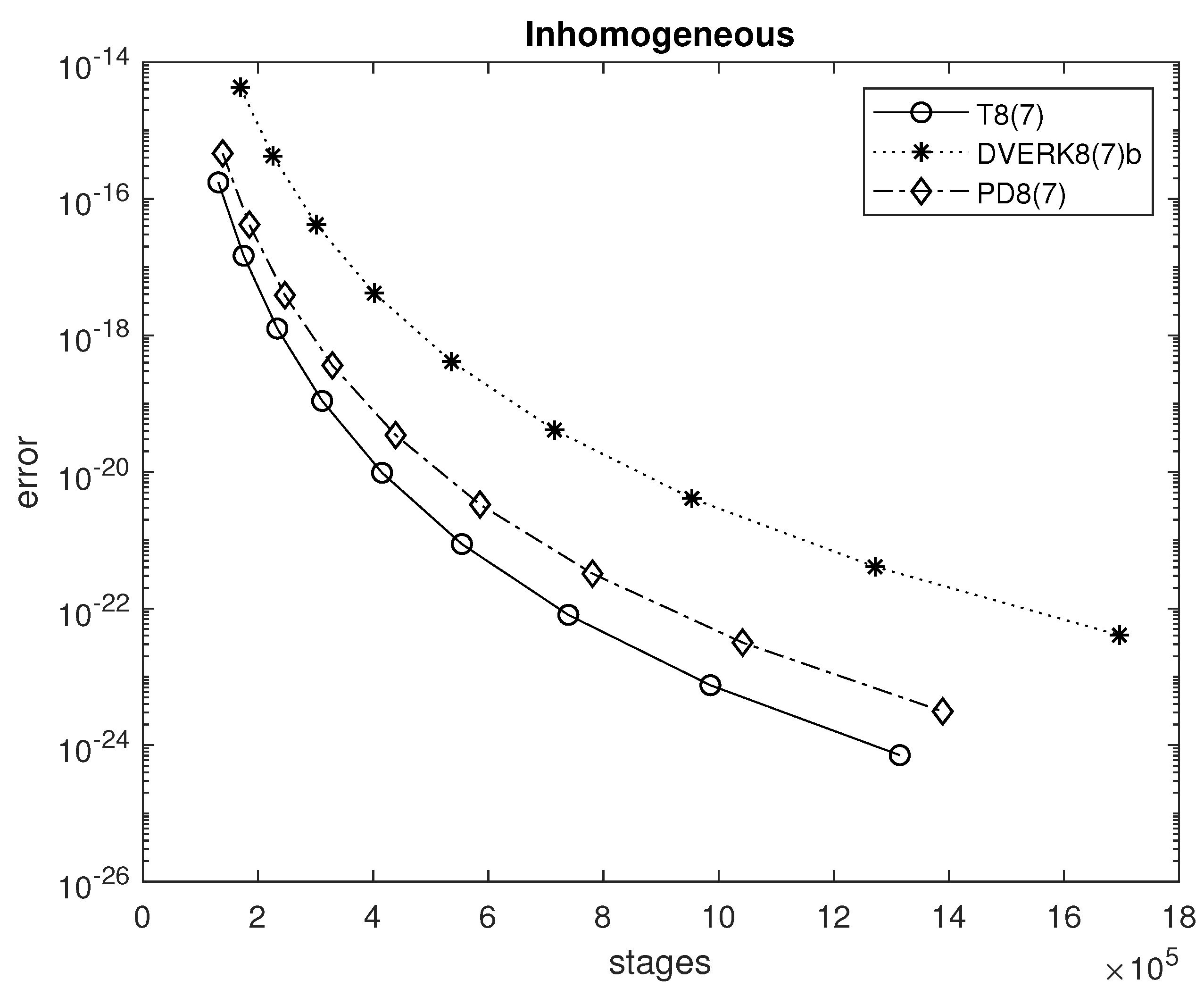
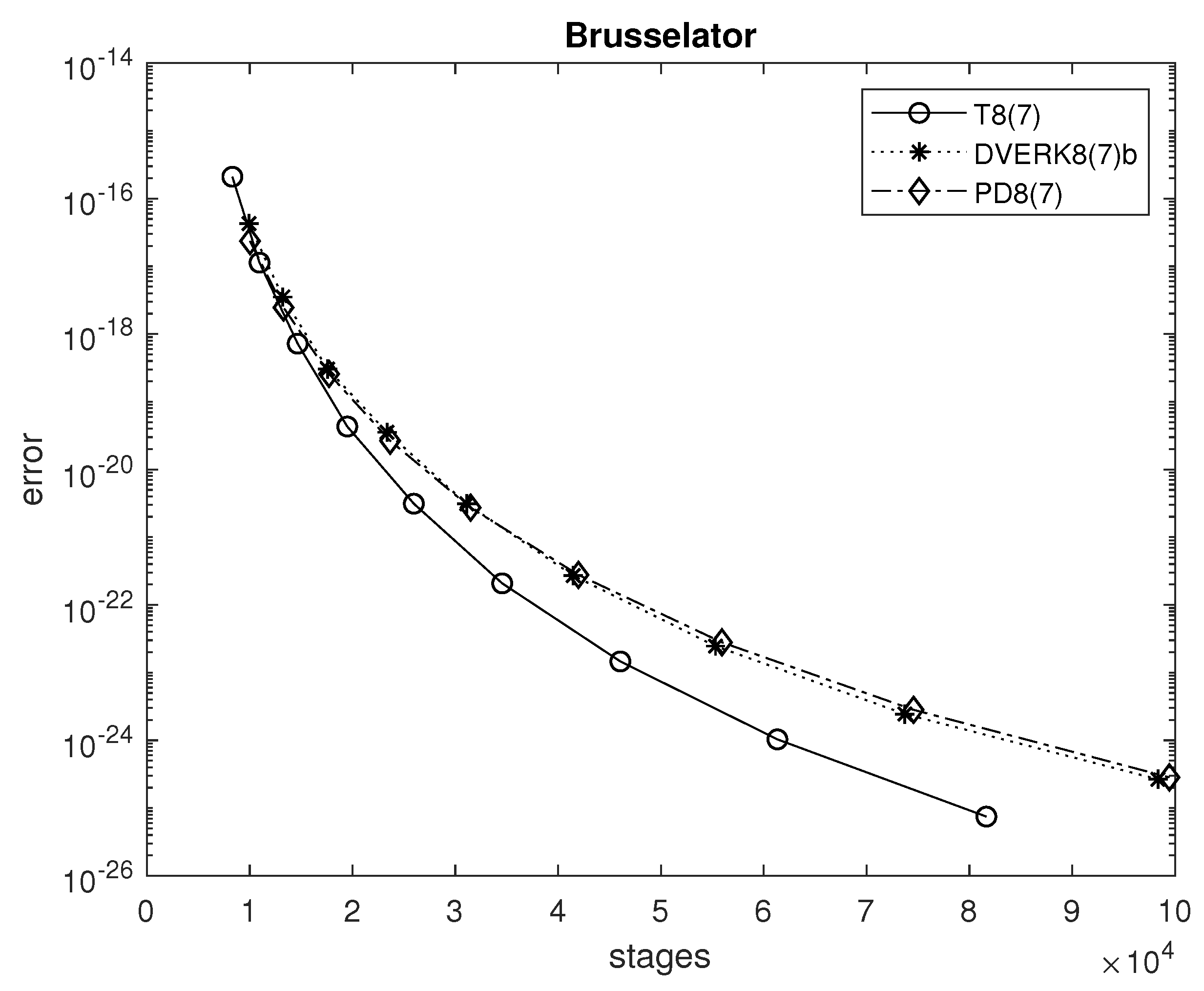
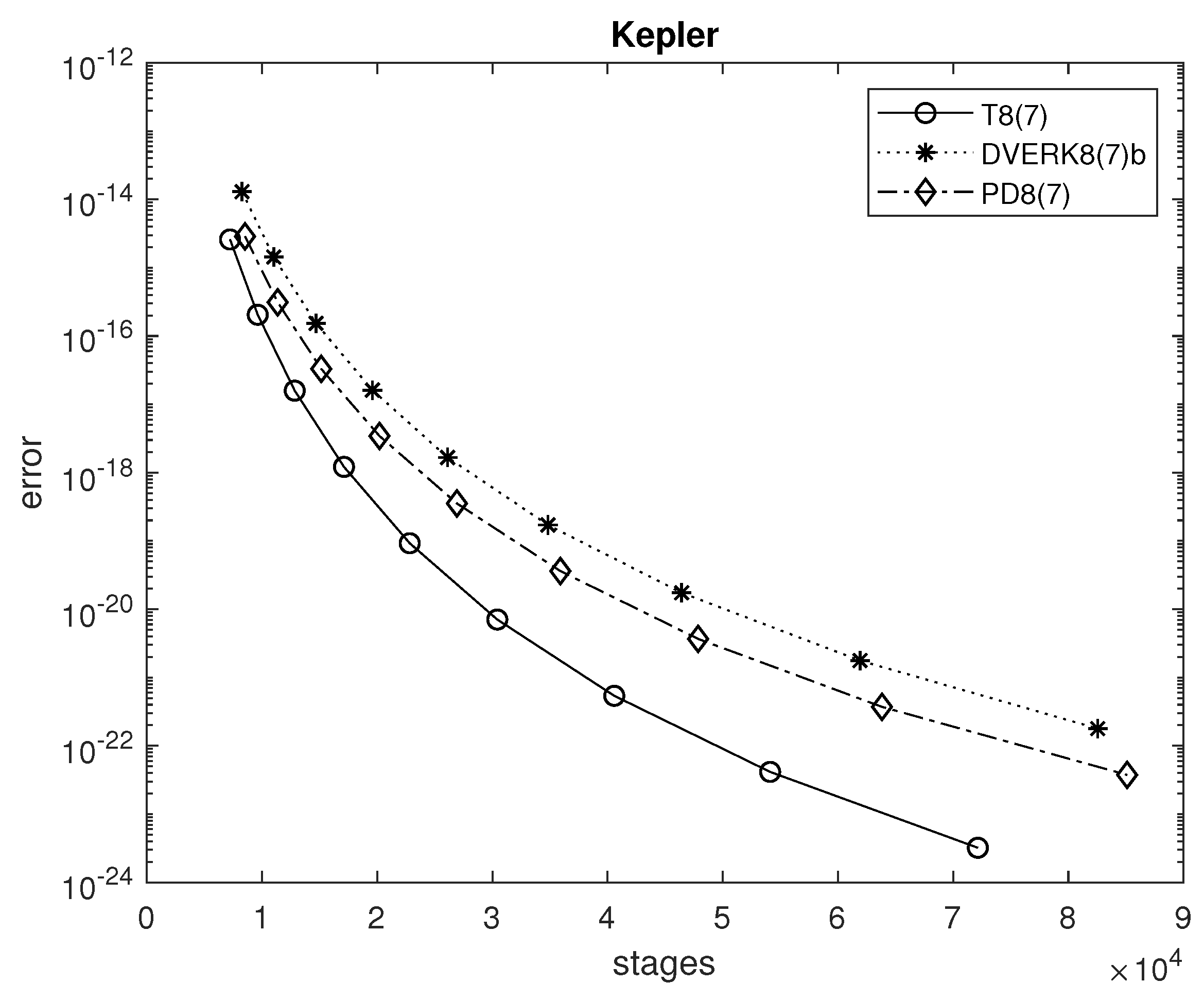
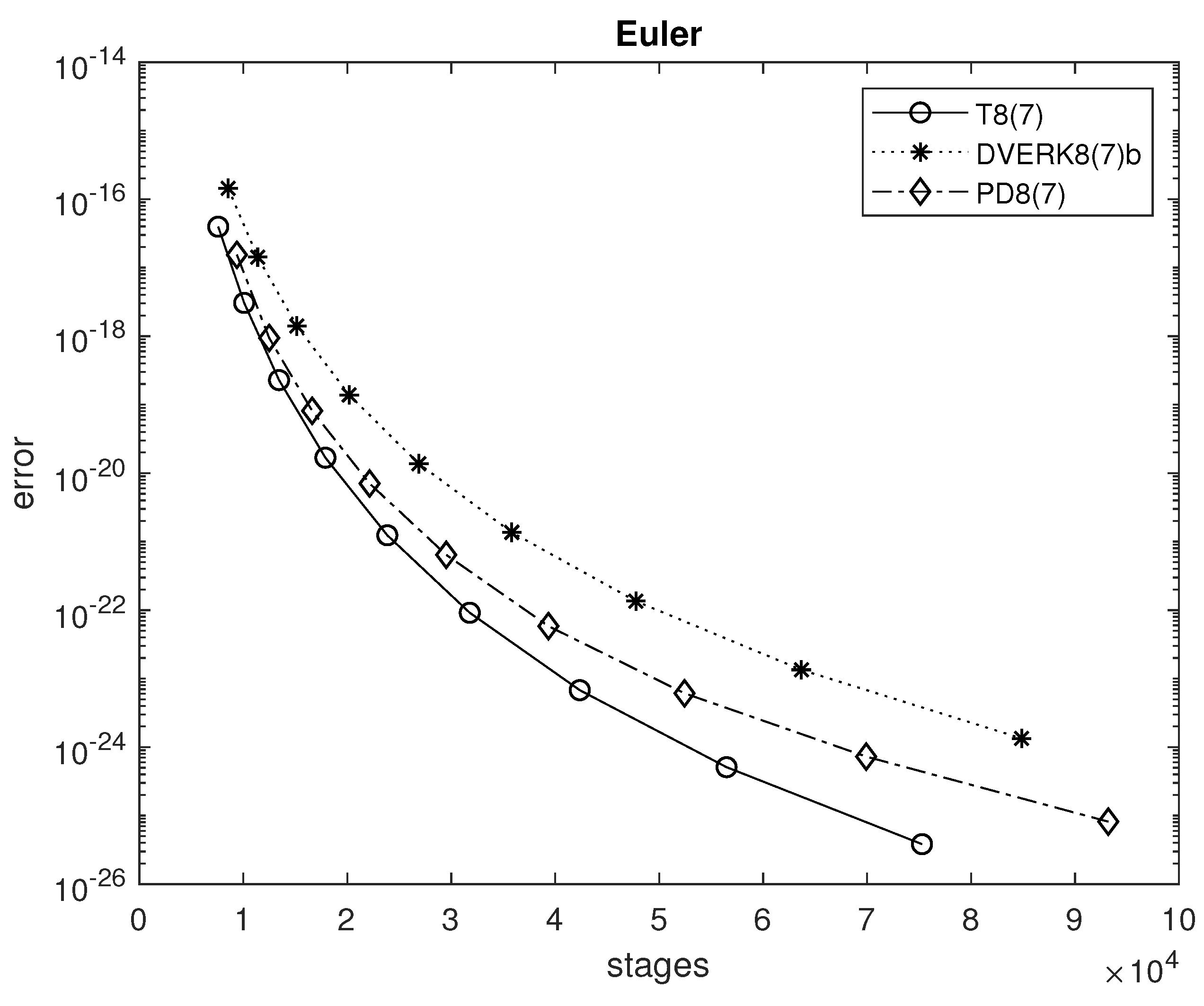
The basic characteristics of the methods presented here can be found in
Table 2. It is obvious that our objective was met by far with RK8(7).



 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}