
Initial Tracking, Fast Identification in a Swarm and Combined SLR and GNSS Orbit Determination of the TUBIN Small Satellite


Abstract
1. Introduction
2. Tubix20 Platform and TUBIN Mission
2.1. Previous Missions of the TUBiX20 Platform
2.2. Goals and Spacecraft Development
2.3. On-Ground Verification
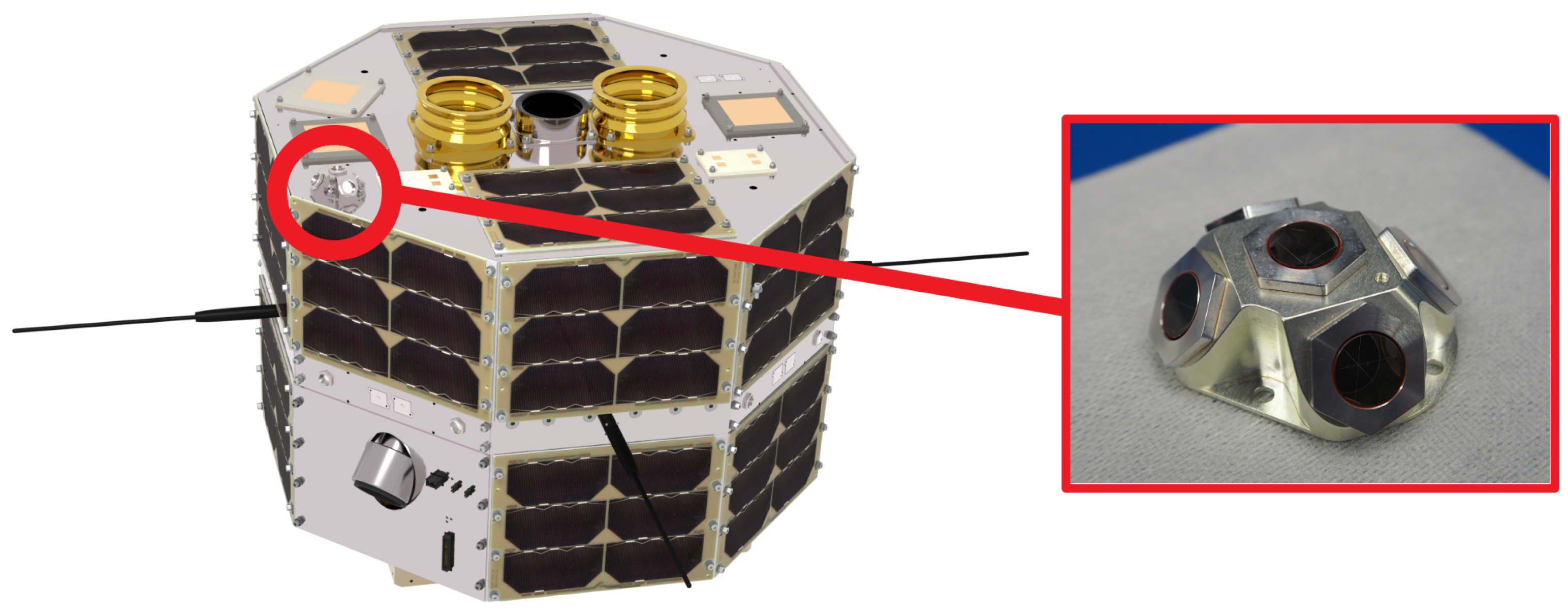
2.3.1. Characterization and Binning of Laser Retroreflectors
2.3.2. GPS Receiver Verification by Spoofing
3. Leop and Spacecraft Identification after Launch
3.1. TLE Generation for Ground Station Tracking
3.2. GPS Receiver Commissioning
3.3. LEOP Orbit Determination from GPS Data
3.3.1. Orbit Determination Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model or Parameter | Description |
|---|---|
| Earth gravity | EIGEN-6S (truncated to 120 × 120) |
| Earth tides | IERS conventions 2010 |
| Ocean tides | FES2004 |
| Third-body attraction | Moon and Sun from DE430 |
| Atmospheric density model | NRLMSISE-00 |
| Drag coefficient | Constant or estimated |
| Space weather data | 3-hourly CSSI data [13] |
| Spacecraft shape | Box-wing model (when attitude available) |
| Spherical (when no attitude data available) | |
| Earth albedo | Knocke model [15] |
| Solar radiation pressure | Lambertian diffusion on each satellite’s facet, Equations (8)–(45) in [16] (when attitude available) |
| Cannonball model, Equations (8)–(44) in [16] (when no attitude data available) | |
| Radiation coefficient | Constant or estimated |
| Relativistic corrections | Post-Newtonian (Schwarzschild, Lense-Thirring, de Sitter) [17] |
| Inertial reference system | True of Date |
| Precession and nutation | IAU 2000 |
| Polar motion | C04 IERS |
| GPS data | From TUBIN’s Phoenix receiver, quantity and frequency variable |
| GPS antenna—CoG position bias | Applied when attitude data available |
| Numerical integration | Dormand-Prince 853 |
| Integration step size | Variable, max 300 s |
| Orbit determination method | Batch least squares |
| Optimizer | Gauss–Newton with QR decomposer |
3.3.2. Verification of the GPS-Based Orbit Determination
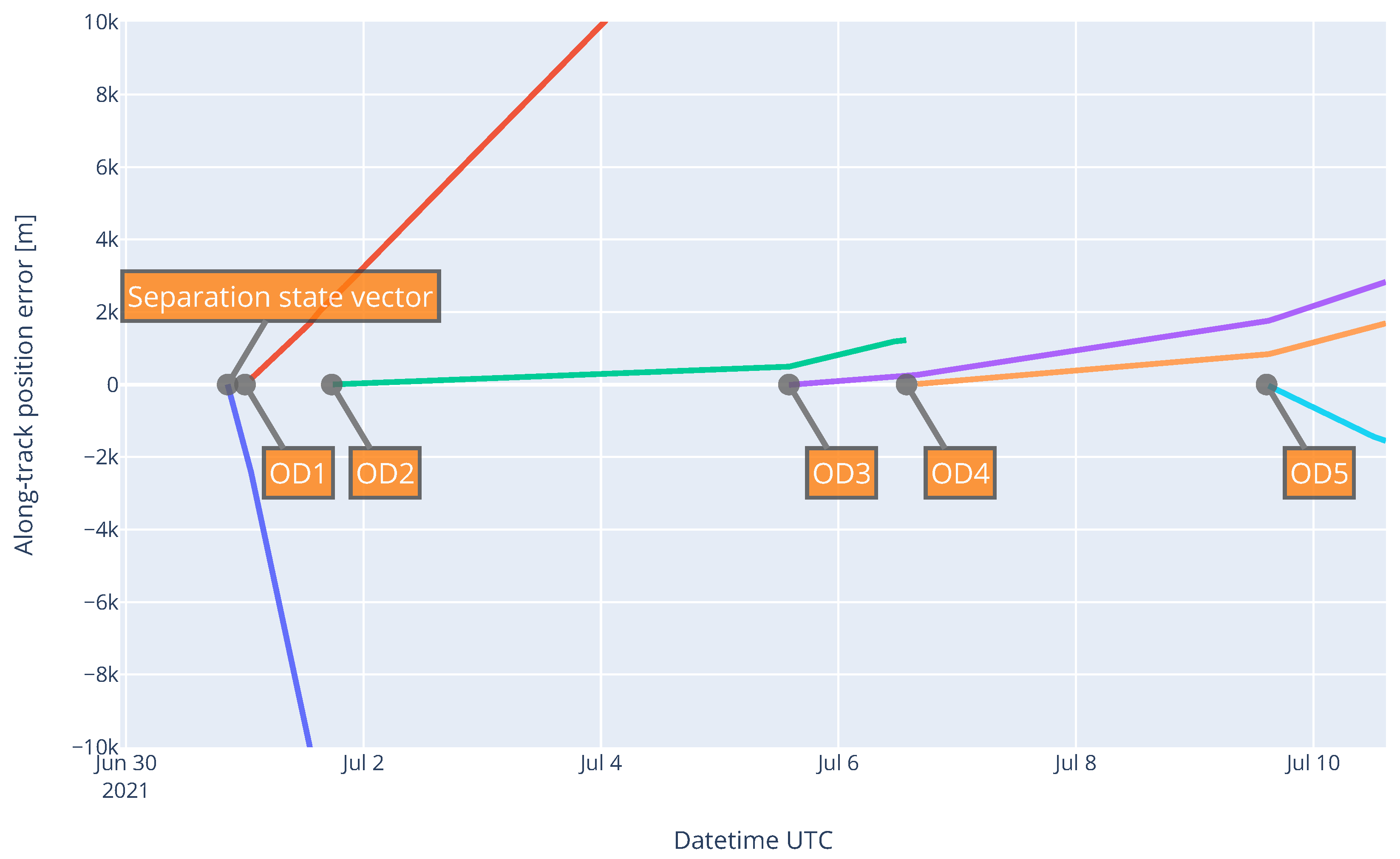
- OD3 was performed using a few tens of GPS measurements over one hour. This explains why this prediction drifted faster than OD2 in Figure 3 above.
- OD4 was performed using continuous GPS measurements from two orbits separated by one day. This orbit determination had the best distribution of measurement data, and therefore, the prediction drifted very little over time.
- OD5 only had 10 min of GPS data at its disposal, which explains why this prediction drifted faster than OD4.
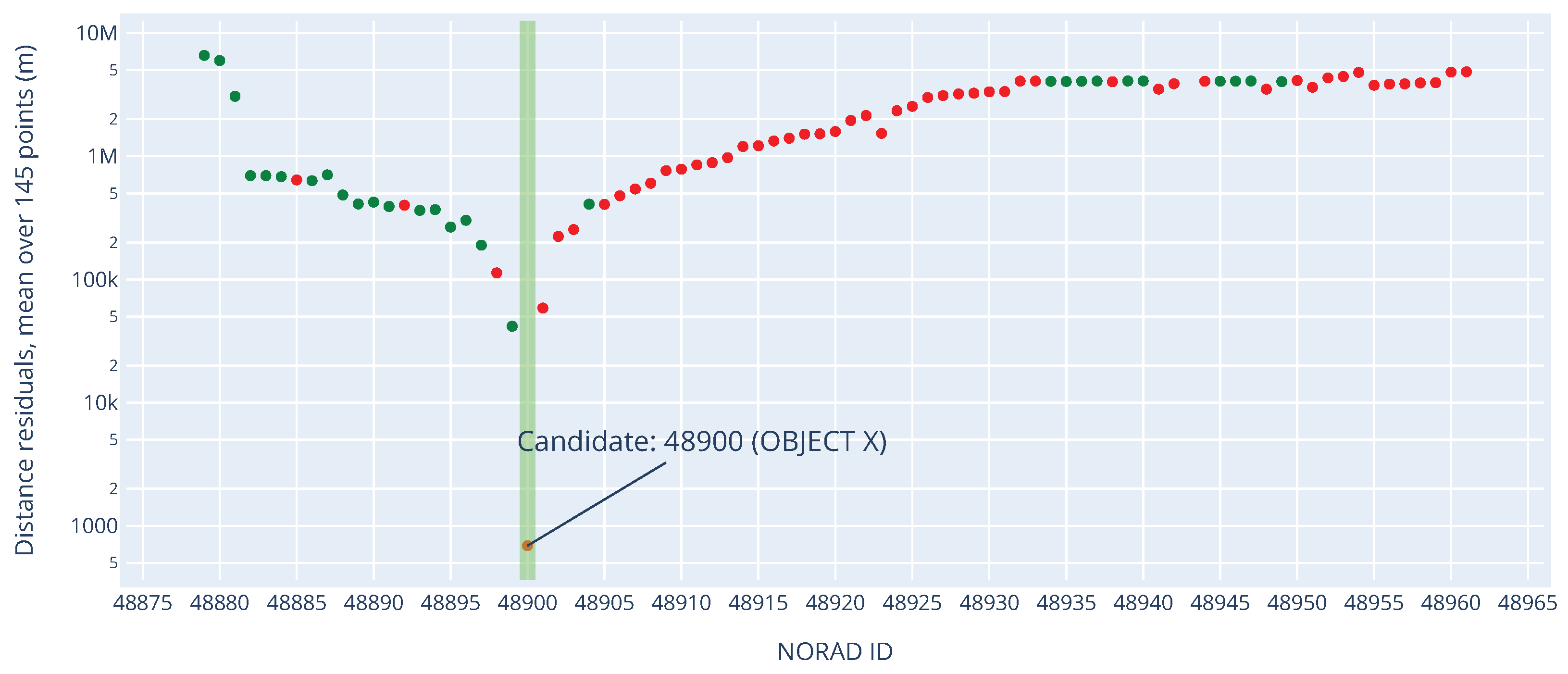
3.4. Identification in a Swarm
3.4.1. Method
3.4.2. Results
3.5. Conclusions on LEOP
4. Operational Orbit Determination from SLR and GPS Data
4.1. Models and Parameters for SLR and GPS Orbit Determination
4.2. Verification of SLR-Only Orbit Determination
4.3. Quality of the Orbit Determination Products
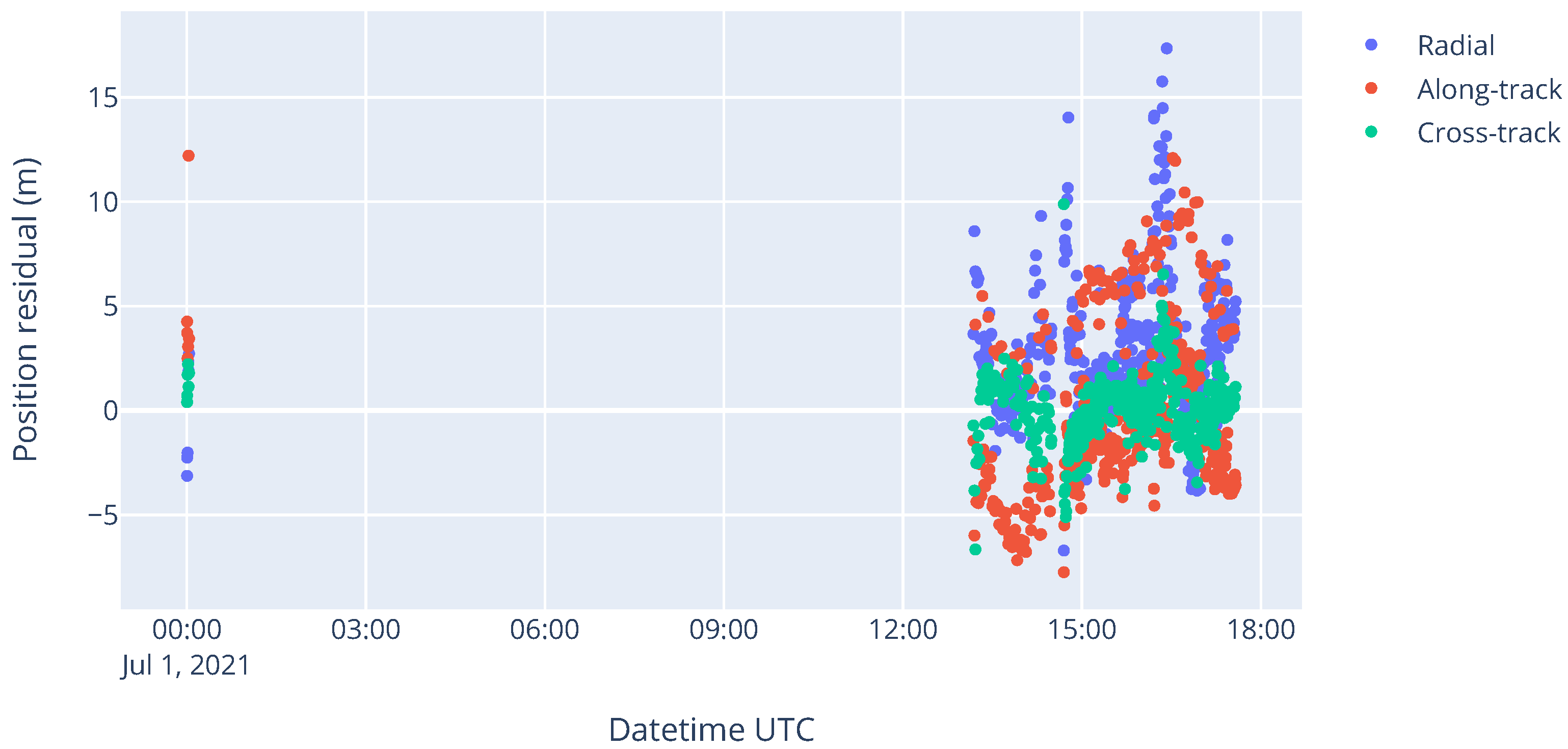
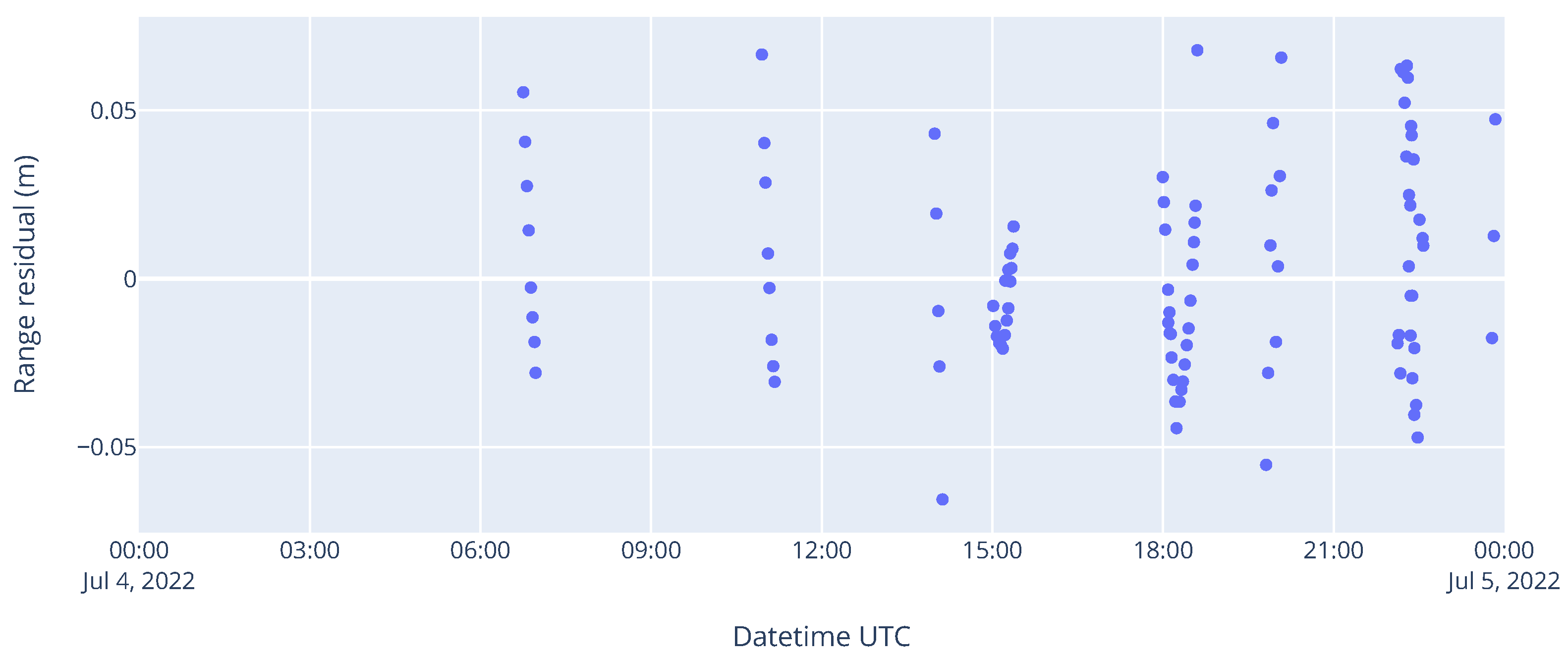
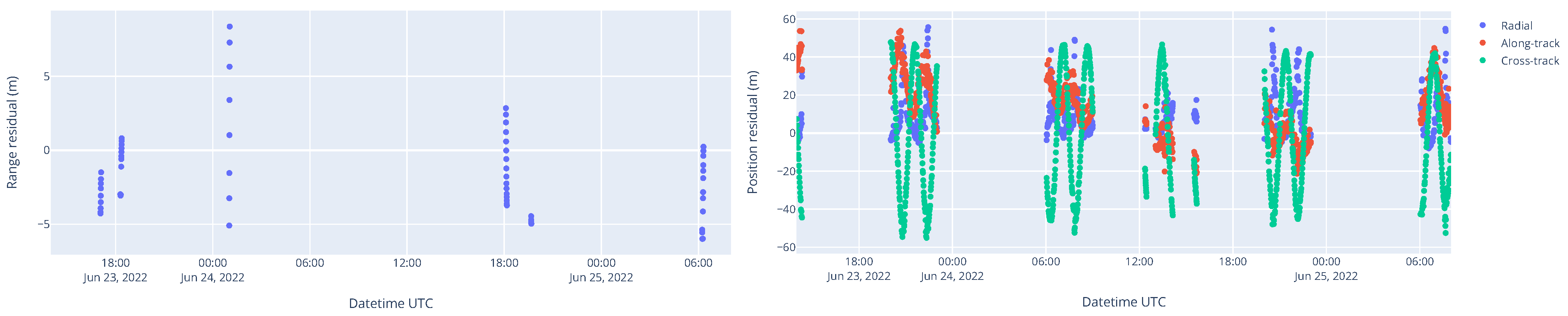
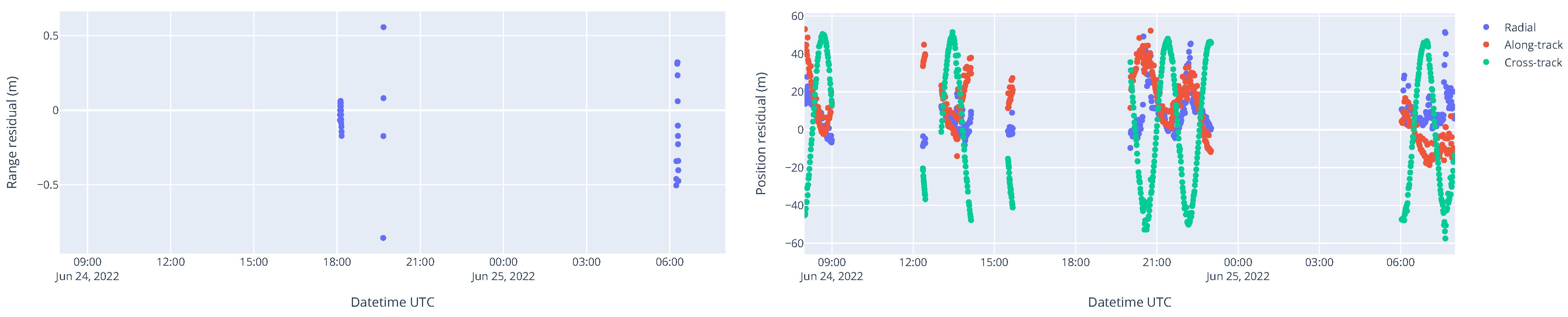
4.3.1. Residuals
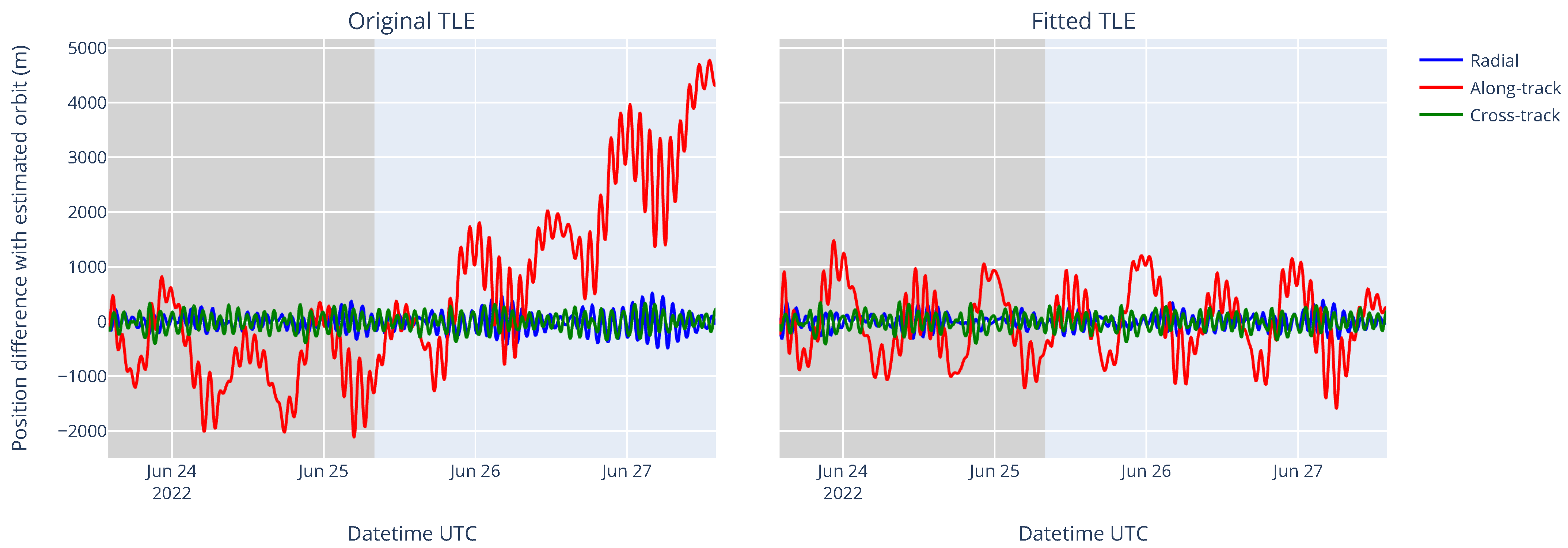
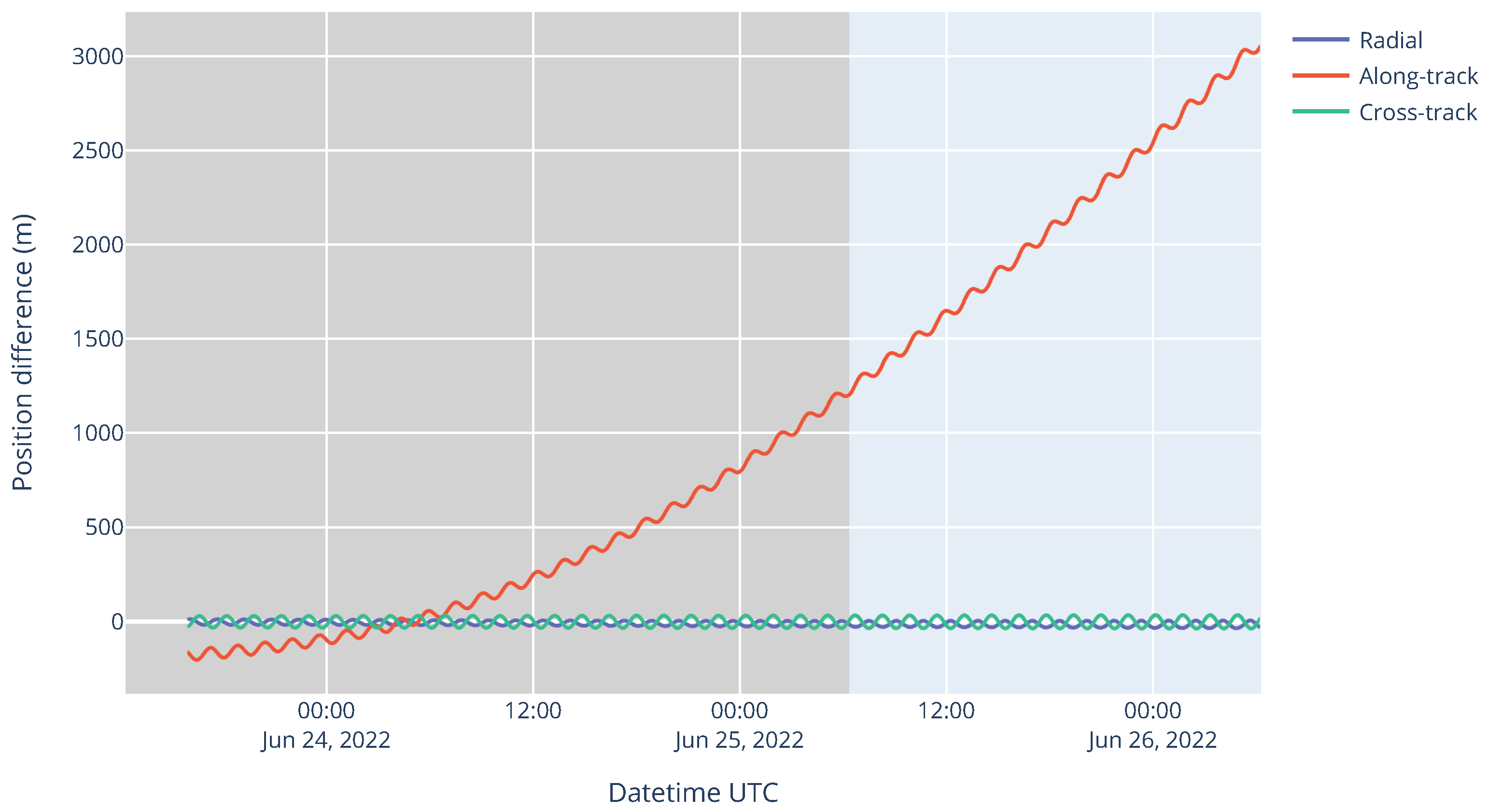
4.3.2. Comparison of Successive CPF Predictions
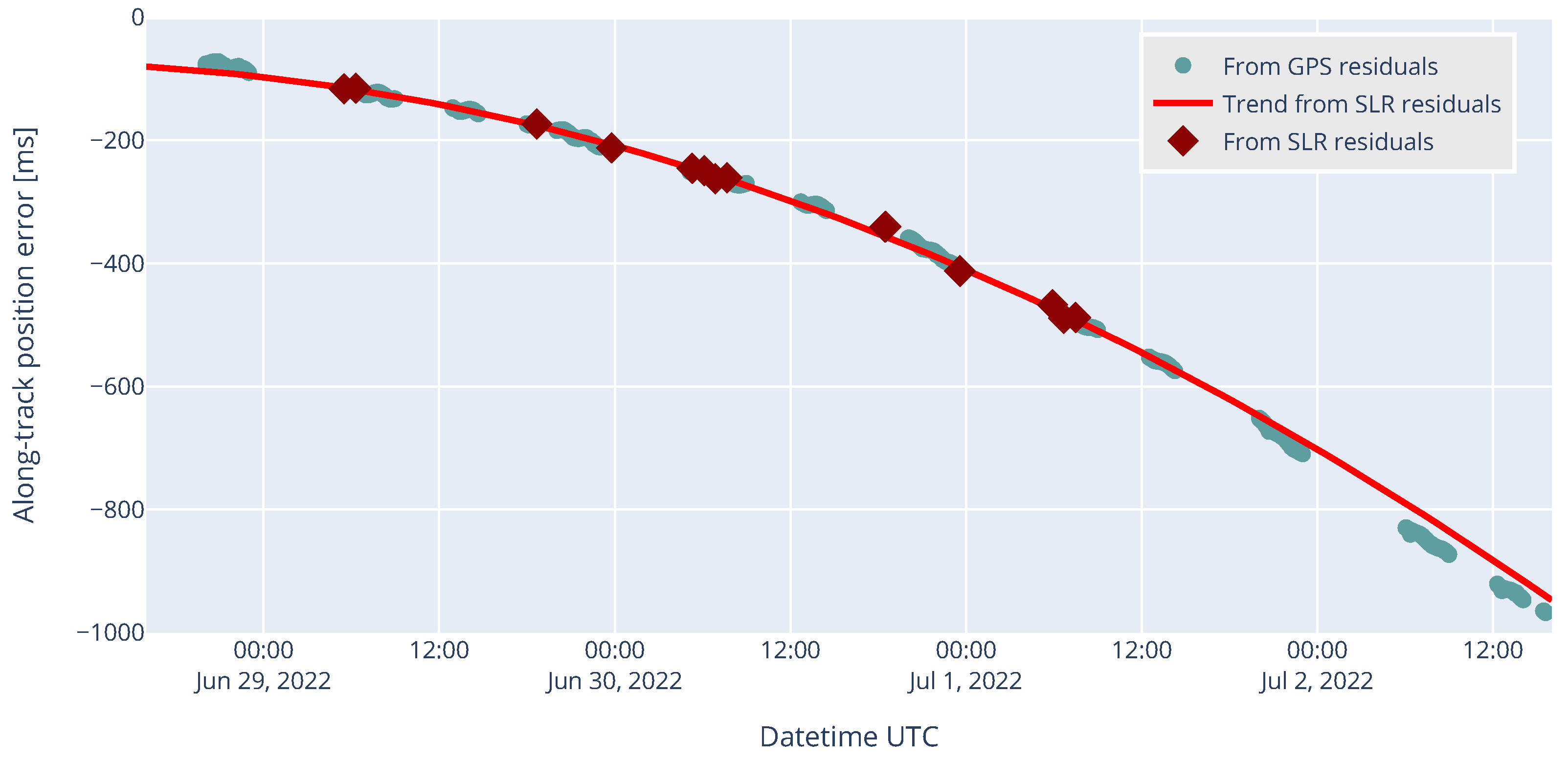
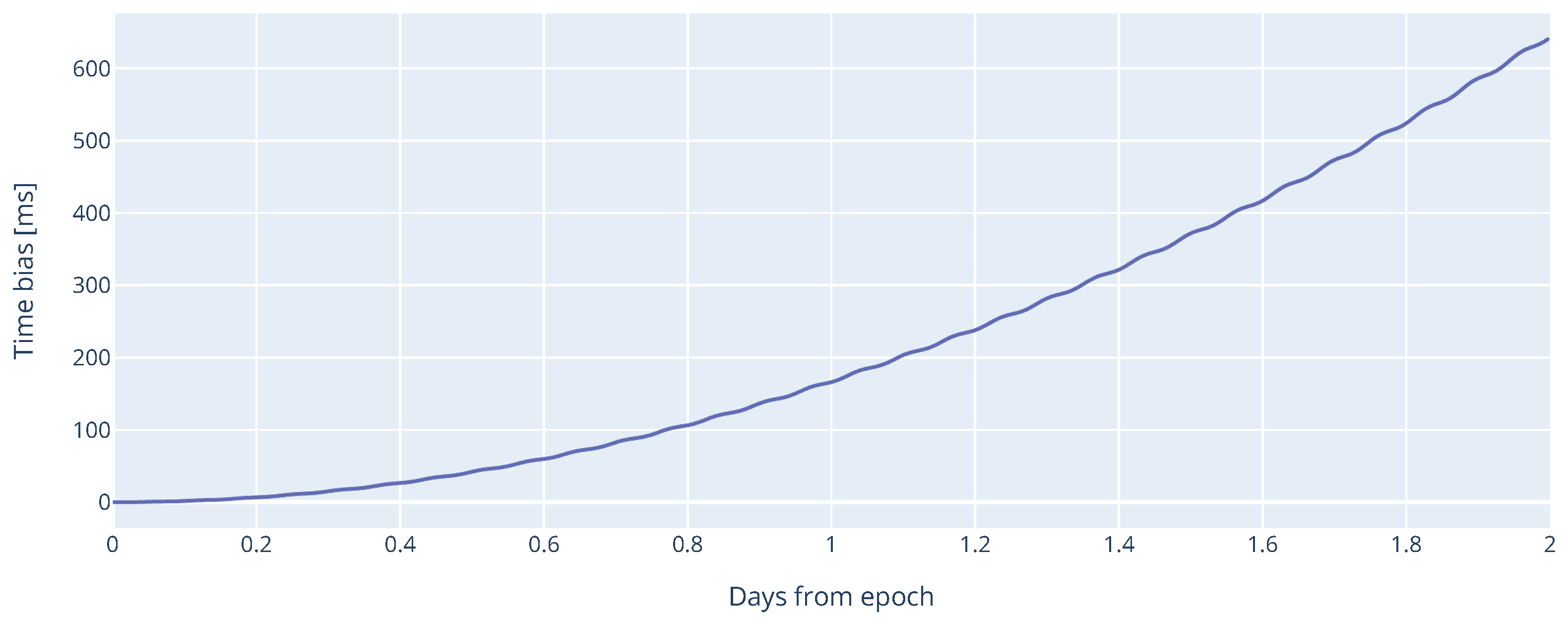
4.3.3. Time Bias of Orbit Predictions
4.3.4. Improvement of Orbit Prediction Using GPS Time Bias
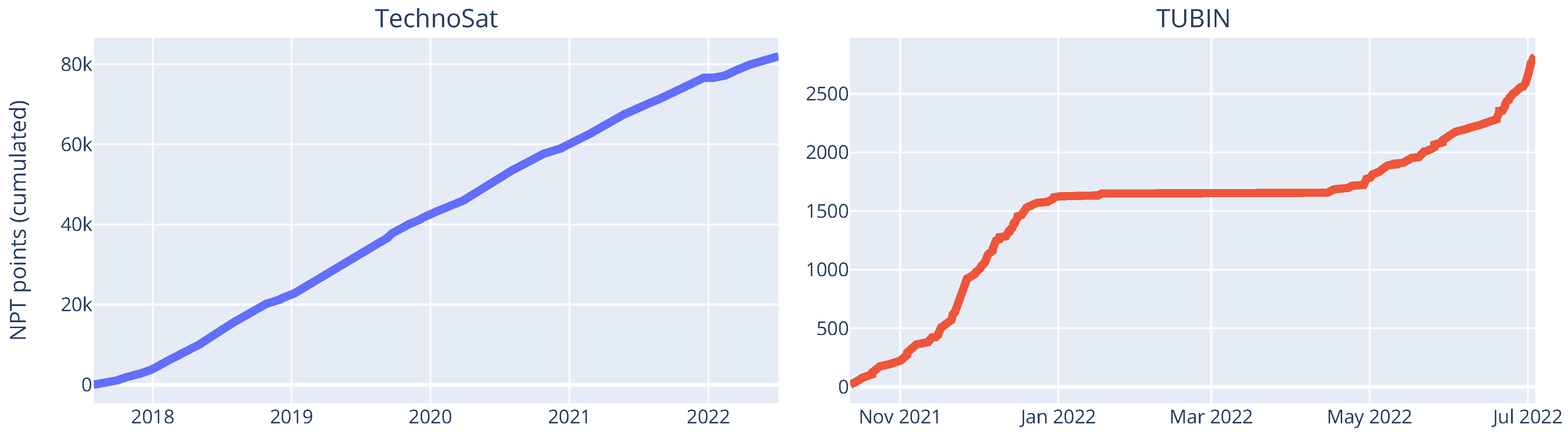
4.4. SLR Data Statistics
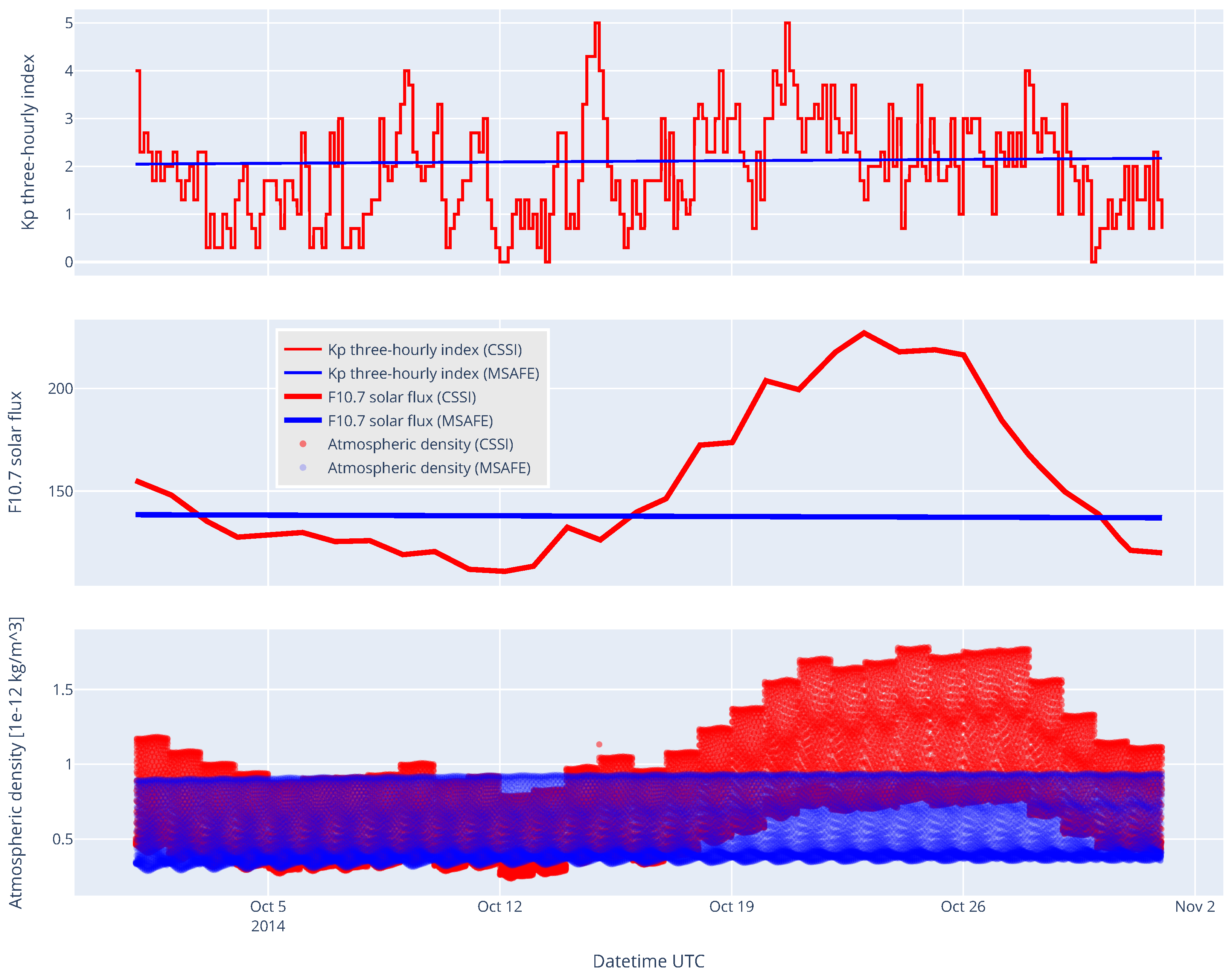
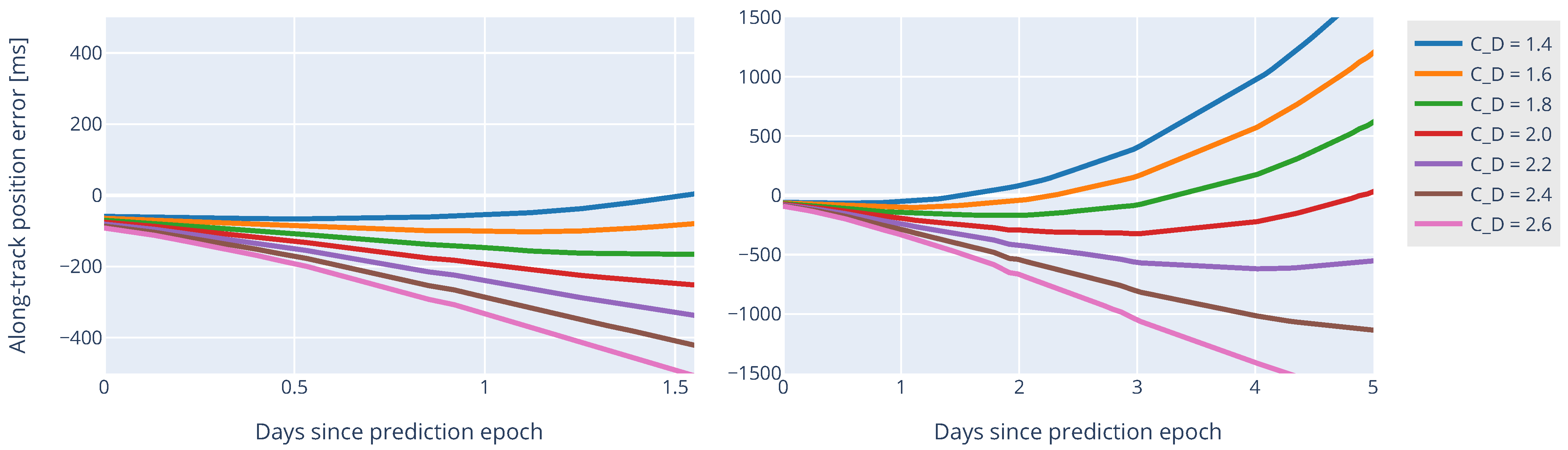
4.5. Effect of the Attitude on the Atmospheric Drag
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CDDIS | Crustal Dynamics Data Information System |
| CoG | Center of gravity |
| CPF | Consolidated Prediction Format |
| CRD | Consolidated Laser Ranging Data Format |
| CSpOC | Combined Space Operations Center |
| DLR | Deutsches Zentrum für Luft- und Raumfahrt |
| ECEF | Earth-centered Earth-fixed |
| EDC | EUROLAS Data Center |
| FOV | Field Of view |
| GFZ | GeoForschungsZentrum |
| GNSS | Global navigation satellite system |
| GPS | Global positioning system |
| ILRS | International Laser Ranging Service |
| LEO | Low-Earth orbit |
| LEOP | Launch and early orbit phase |
| LRR | Laser retroreflector |
| LVLH | Local-vertical local-horizontal |
| MEMS | Microelectromechanical systems |
| MSAFE | MSFC Solar Activity Future Estimation |
| MSFC | Marshall Space Flight Center |
| NERC | Natural Environment Research Council |
| NORAD | North American Aerospace Defense Command |
| NPT | Normal point data |
| POD | Precise orbit determination |
| PVT | Position velocity and time |
| QUEEN | QUantentechnologien für den Einsatz auf Einem Nanosatelliten |
| SDR | Software-defined radio |
| SGF | Space Geodesy Facility |
| SGP4 | Simplified general perturbations |
| SINEX | Solution Independent Exchange |
| SLR | Satellite laser ranging |
| TLE | Two-line elements |
| TOD | True of date |
| TTFF | Time to first fix |
| TUBIN | TU Berlin Infrared Nanosatellite |
| UHF | Ultra-high frequency |
References
- Barschke, M.F.; Jonglez, C.; Werner, P.; von Keiser, P.; Gordon, K.; Starke, M.; Lehmann, M. Initial Orbit Results from the TUBiX20 Platform. Acta Astronaut. 2020, 167, 108–116. [Google Scholar] [CrossRef]
- Najder, J.; Sośnica, K. Quality of Orbit Predictions for Satellites Tracked by SLR Stations. Remote Sens. 2021, 13, 1377. [Google Scholar] [CrossRef]
- Bauer, S.; Steinborn, J. Time Bias Service: Analysis and Monitoring of Satellite Orbit Prediction Quality. J. Geod. 2019, 93, 2367–2377. [Google Scholar] [CrossRef]
- Noomen, R. Precise Orbit Determination With Slr: Setting The Standard. Surv. Geophys. 2001, 22, 473–480. [Google Scholar] [CrossRef]
- Gordon, K.; Barschke, M.F.; Werner, P. From TechnoSat to TUBIN: Performance Upgrade for the TUBiX20 Microsatellite Platform Based on Flight Experience. CEAS Space J. 2020, 12, 515–525. [Google Scholar] [CrossRef]
- Wang, P.; Almer, H.; Kirchner, G.; Barschke, M.F.; Starke, M.; Werner, P.; Koidl, F.; Steindorf, M. kHz SLR Application on the Attitude Analysis of TechnoSat. In Proceedings of the 21st International Workshop on Laser Ranging, Canberra, Australia, 5–9 November 2018. [Google Scholar]
- Markgraf, M. The Phoenix GPS Receiver—A Practical Example of the Successful Application of a COTS-Based Navigation Sensor in Different Space Missions. In Proceedings of the 8th Annual IEEE International Conference on Wireless for Space and Extreme Environments, Virtual, 12–14 October 2020. [Google Scholar]
- Jonglez, C.; Barschke, M.; Bartholomäus, J.; Werner, P. ADCS Performance Assessment Using Payload Camera: Lessons Learned on a Small Satellite Mission and Future Applications. In Proceedings of the 16th International Conference on Space Operations, Cape Town, South Africa, 3–5 May 2021. [Google Scholar]
- Bartholomäus, J.; Barschke, M.F.; Werner, P.; Stoll, E. Initial Results of the TUBIN Small Satellite Mission for Wildfire Detection. Acta Astronaut. 2022, 200, 347–356. [Google Scholar] [CrossRef]
- Ebinuma, T. LimeGPS SDR Simulator. 2018. Available online: https://github.com/osqzss/LimeGPS (accessed on 27 June 2022).
- Maisonobe.; Ward, E.; Journot, M.; Bonnefille, G.; Neidhart, T.; Dinot, S.; Cazabonne, B.; Cucchietti, V.; Jonglez, C.; Hernanz, J.; et al. CS-SI/Orekit: 11.3. Zenodo, 2022. [Google Scholar] [CrossRef]
- Jonglez, C. TLE Fitting Tool. 2019. Available online: https://github.com/GorgiAstro/tle-fitting (accessed on 27 June 2022).
- Vallado, D.A.; Kelso, T.S. Earth Orientation Parameter and Space Weather Data for Flight Operations. In Proceedings of the 23rd AAS/AIAA Space Flight Mechanics Meeting, Kauai, HI, USA, 10–14 February 2013. [Google Scholar]
- Ward, E.M.; Warner, J.G.; Maisonobe, L. Do Open Source Tools Rival Heritage Systems? A Comparison of Tide Models in OCEAN and Orekit. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, San Diego, CA, USA, 4–7 August 2014; p. 4429. [Google Scholar]
- Knocke, P.; Ries, J.; Tapley, B. Earth Radiation Pressure Effects on Satellites. In Proceedings of the Astrodynamics Conference, Minneapolis, MN, USA, 15–17 August 1988; p. 4292. [Google Scholar]
- Vallado, D.A.; McClain, W.D. Fundamentals of Astrodynamics and Applications, 4th ed.; Number 21 in Space Technology Library; Microcosm Press: Hawthorne, CA, USA, 2013. [Google Scholar]
- Rudenko, S.; BloBfeld, M.; Muller, H.; Dettmering, D.; Angermann, D.; Seitz, M. Evaluation of DTRF2014, ITRF2014, and JTRF2014 by Precise Orbit Determination of SLR Satellites. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3148–3158. [Google Scholar] [CrossRef]
- Ray, V.; Scheeres, D.J. Drag Coefficient Model to Track Variations Due to Attitude and Orbital Motion. J. Guid. Control. Dyn. 2020, 43, 1915–1926. [Google Scholar] [CrossRef]
- Vallado, D.A.; Finkleman, D. A Critical Assessment of Satellite Drag and Atmospheric Density Modeling. Acta Astronaut. 2014, 95, 141–165. [Google Scholar] [CrossRef]
- Suggs, R.J. The MSFC Solar Activity Future Estimation (MSAFE) Model. In Proceedings of the the Applied Space Environments Conference, Huntsville, AL, USA, 15–19 May 2017. [Google Scholar]
- Croissant, K.; White, D.; Álvarez, X.; Adamopoulos, V.; Bassa, C.; Boumghar, R.; Brown, H.; Damkalis, F.; Daradimos, I.; Dohmen, P.; et al. An Updated Overview of the Satellite Networked Open Ground Stations (SatNOGS) Project. In Proceedings of the Small Satellite Conference, Logan, UT, USA, 6–11 August 2022. [Google Scholar]
- Weiß, S. Contributions to On-Board Navigation on 1U CubeSats. Ph.D. Thesis, Universitätsverlag der Technischen Universität Berlin, Berlin, Germany, 2022. [Google Scholar]
- Jonglez, C. Orbit Determination Example from Laser Ranging Data Using Orekit Python. 2020. Available online: https://github.com/GorgiAstro/laser-orbit-determination (accessed on 27 June 2022).
- Kim, Y.R.; Park, E.; Kucharski, D.; Lim, H.C. Orbit Determination Using SLR Data for STSAT-2C: Short-arc Analysis. J. Astron. Space Sci. 2015, 32, 189–200. [Google Scholar] [CrossRef][Green Version]
- Schillak, S.; Lejba, P.; Michałek, P. Analysis of the Quality of SLR Station Coordinates Determined from Laser Ranging to the LARES Satellite. Sensors 2021, 21, 737. [Google Scholar] [CrossRef] [PubMed]
- Schwatke, C. EUROLAS Data Center (EDC)—A New Website for Tracking the SLR Data Flow. In Proceedings of the EGU General Assembly Conference, Vienna, Austria, 22–27 April 2012; p. 7861. [Google Scholar]
- Mendes, V.B.; Pavlis, E.C. High-Accuracy Zenith Delay Prediction at Optical Wavelengths. Geophys. Res. Lett. 2004, 31, L14602. [Google Scholar] [CrossRef]
- Sośnica, K. Impact of the Atmospheric Drag on Starlette, Stella, AJISAI, and LARES Orbits. Artif. Satell. 2015, 50, 1–18. [Google Scholar] [CrossRef]
- Schutz, B.E.; Tapley, B.D. Orbit Determination and Model Improvement for Seasat and Lageos. In Proceedings of the Astrodynamics Conference, Danvers, MA, USA, 11–13 August 1980; p. 1679. [Google Scholar]
- Schutz, B.E.; Tapley, B.D.; Eanes, R.J.; Marsh, J.G.; Williamson, R.G.; Martin, T.V. Precision Orbit Determination Software Validation Experiment. J. Astronaut. Sci. 1980, 28, 327–343. [Google Scholar]
- Tapley, B.D.; Schutz, B.E.; Born, G.H. Statistical Orbit Determination; Elsevier Academic Press: Amsterdam, The Netherlands; Boston, MA, USA, 2004. [Google Scholar]
- Vallado, D.; Cefola, P. Two-Line Element Sets—Practice and Use. In Proceedings of the 63rd International Astronautical Congress, Naples, Italy, 1–5 October 2012; pp. 5812–5825. [Google Scholar]















| Mission | TechnoSat | TUBIN |
|---|---|---|
| Objective | Technology demonstration | Technology demonstration |
| Earth observation | ||
| Initial orbit | 620 km SSO | 530 km SSO |
| Design lifetime | 1 year | 1 year |
| Launch date | 14 July 2017 | 30 June 2021 |
| Spacecraft mass | 20 kg | 23 kg |
| Spacecraft volume | 465 × 465 × 305 mm3 | 465 × 465 × 305 mm3 |
| Orbit determination | Satellite laser ranging (SLR) | SLR |
| GPS receiver |
| Perturbation Force | Acceleration in Along-Track Direction (Absolute Value, Mean) (m/s) |
|---|---|
| Earth gravity harmonics 120 × 120 | 7.25 × 10−3 |
| Sun third-body attraction | 1.77 × 10−7 |
| Moon third-body attraction | 1.68 × 10−7 |
| Atmospheric drag | 1.39 × 10−7 |
| Solid tides | 5.57 × 10−8 |
| Ocean tides | 1.95 × 10−8 |
| Sun radiation pressure | 1.37 × 10−8 |
| Earth albedo | 3.44 × 10−10 |
| Model or Parameter | Description |
|---|---|
| SLR station coordinates | SLRF2014 version 200428 + eccentricities |
| SLR data | NPT files, bin size 15 s, from EDC API [26] |
| Tropospheric delay | Mendes–Pavlis model [27] |
| Weather data for tropospheric delay | Included in NPT files |
| Data editing | 7-sigma clipping on SLR data |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jonglez, C.; Bartholomäus, J.; Werner, P.; Stoll, E. Initial Tracking, Fast Identification in a Swarm and Combined SLR and GNSS Orbit Determination of the TUBIN Small Satellite. Aerospace 2022, 9, 793. https://doi.org/10.3390/aerospace9120793
Jonglez C, Bartholomäus J, Werner P, Stoll E. Initial Tracking, Fast Identification in a Swarm and Combined SLR and GNSS Orbit Determination of the TUBIN Small Satellite. Aerospace. 2022; 9(12):793. https://doi.org/10.3390/aerospace9120793
Chicago/Turabian StyleJonglez, Clément, Julian Bartholomäus, Philipp Werner, and Enrico Stoll. 2022. "Initial Tracking, Fast Identification in a Swarm and Combined SLR and GNSS Orbit Determination of the TUBIN Small Satellite" Aerospace 9, no. 12: 793. https://doi.org/10.3390/aerospace9120793
APA StyleJonglez, C., Bartholomäus, J., Werner, P., & Stoll, E. (2022). Initial Tracking, Fast Identification in a Swarm and Combined SLR and GNSS Orbit Determination of the TUBIN Small Satellite. Aerospace, 9(12), 793. https://doi.org/10.3390/aerospace9120793