
A Complete Mission Concept Design and Analysis of the Student-Led CubeSat Project: Light-1

 , , ,
, , ,  ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Mission Concept
2.1. Mission Objectives
- Evaluate the performance of a new miniature terrestrial gamma ray flash detector system in the space environment;
- Provide students educational experience with designing, integrating and testing CubeSats;
- Provide students educational experience with designing space grade electronics and electrical systems.
2.2. Mission Success Criteria
2.2.1. Minimum
- ○
- Deploy CubeSat successfully in orbit;
- ○
- Establish communication with the CubeSat;
- ○
- Receive telemetry data for 1 month;
- ○
- Receive payload data for 1 month.
2.2.2. Sufficient
- ○
- Receive telemetry data for 3 months;
- ○
- Receive payload data for 3 months.
2.2.3. Desirable
- ○
- Receive telemetry data for 6 months;
- ○
- Receive payload data for 6 months.
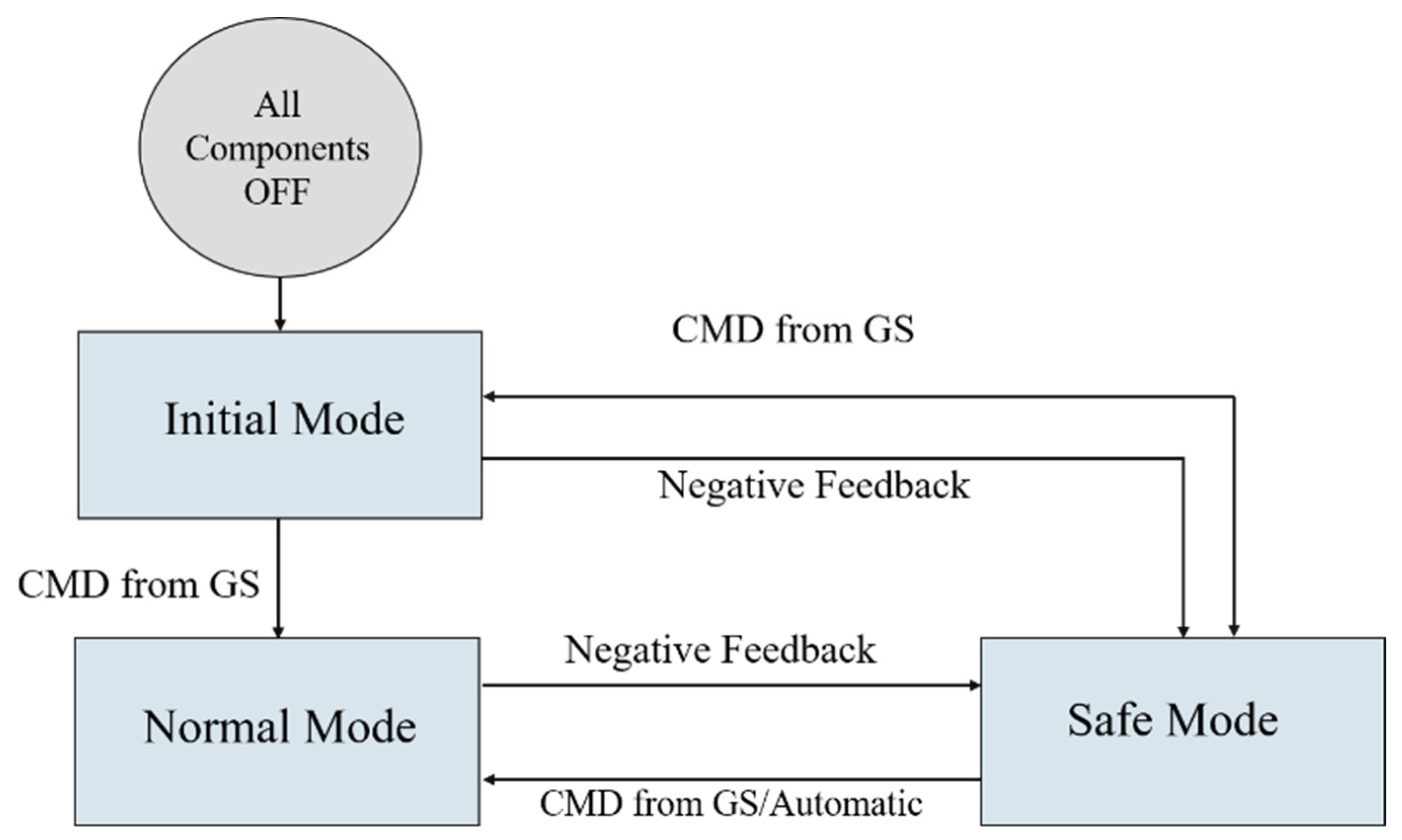
2.3. Mission Concept of Operations
2.3.1. Initial Mode
2.3.2. Normal Mode
2.3.3. Safe Mode
2.4. Mission Analysis
2.4.1. Lifetime Analysis
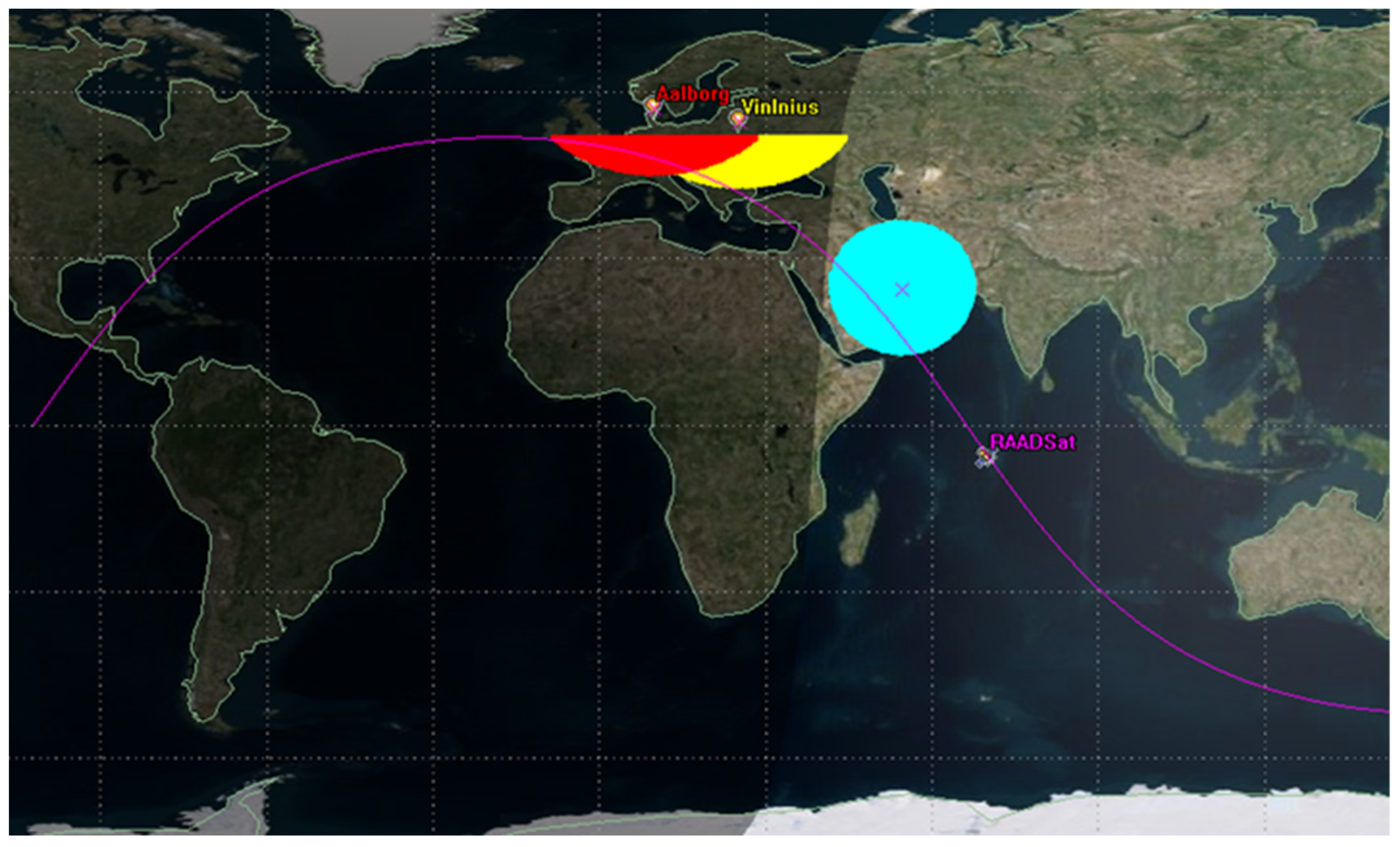
2.4.2. Access Time Analysis
3. Platform Subsystem Design
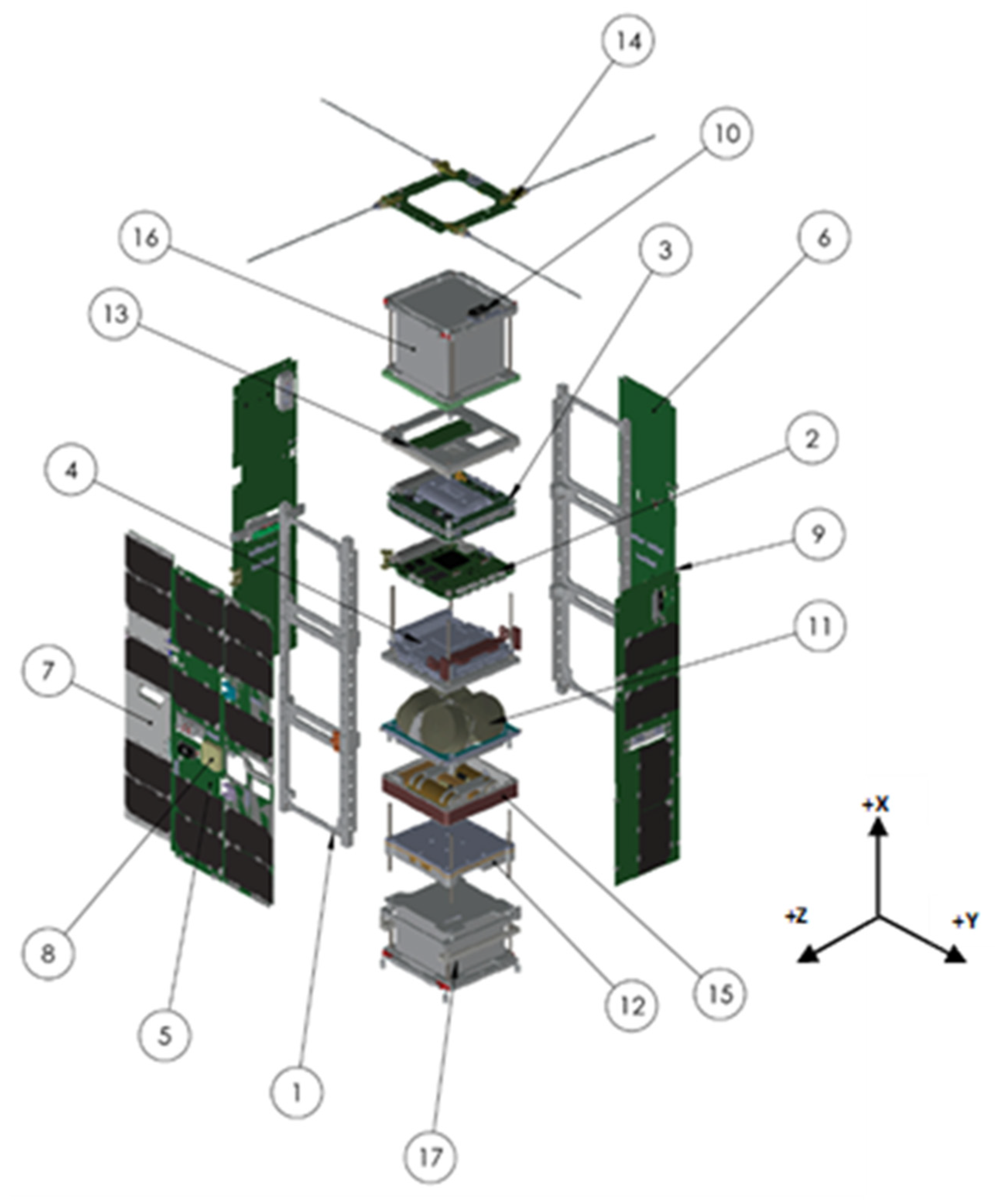
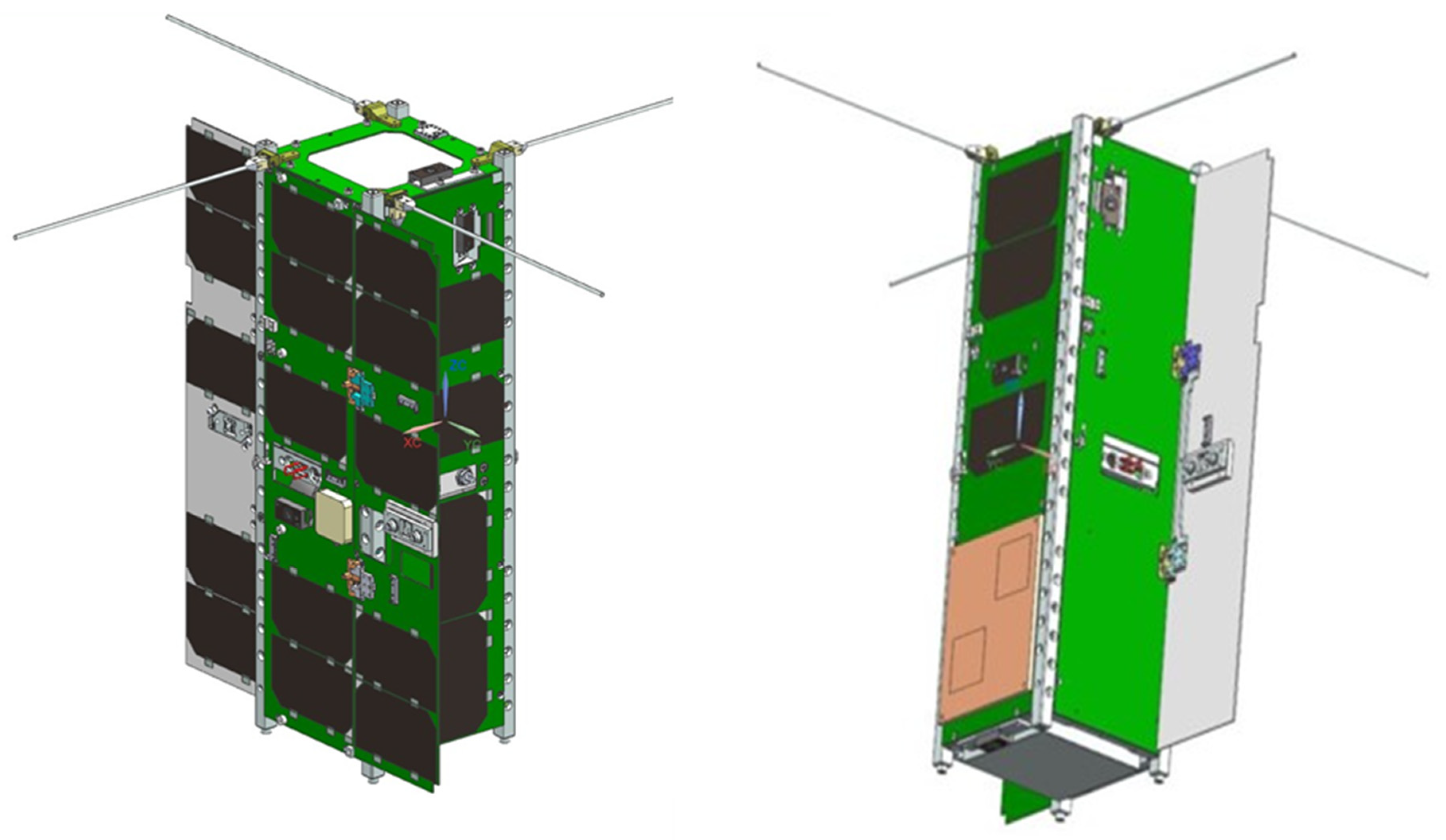
3.1. Mechanical Subsystem
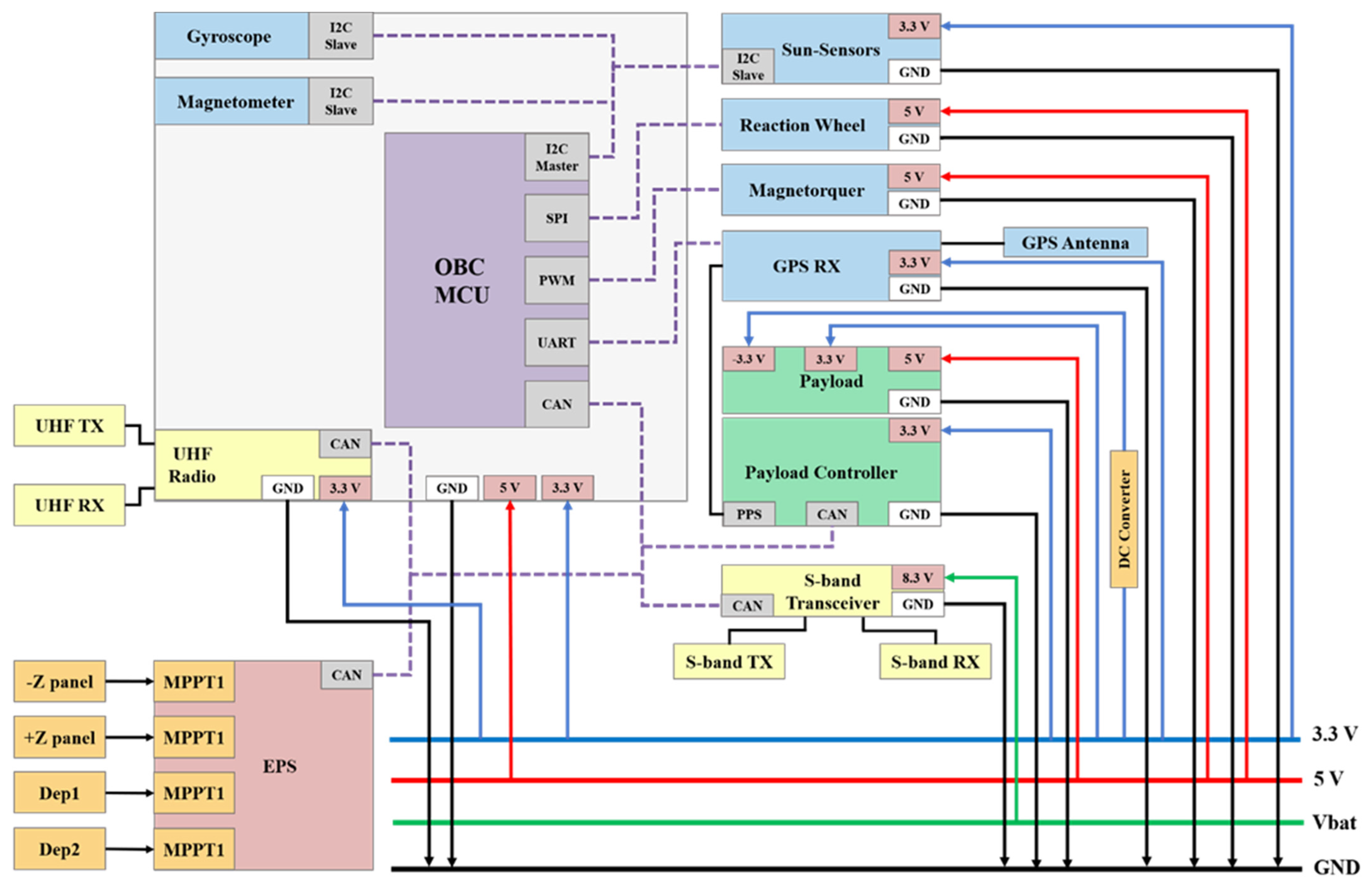
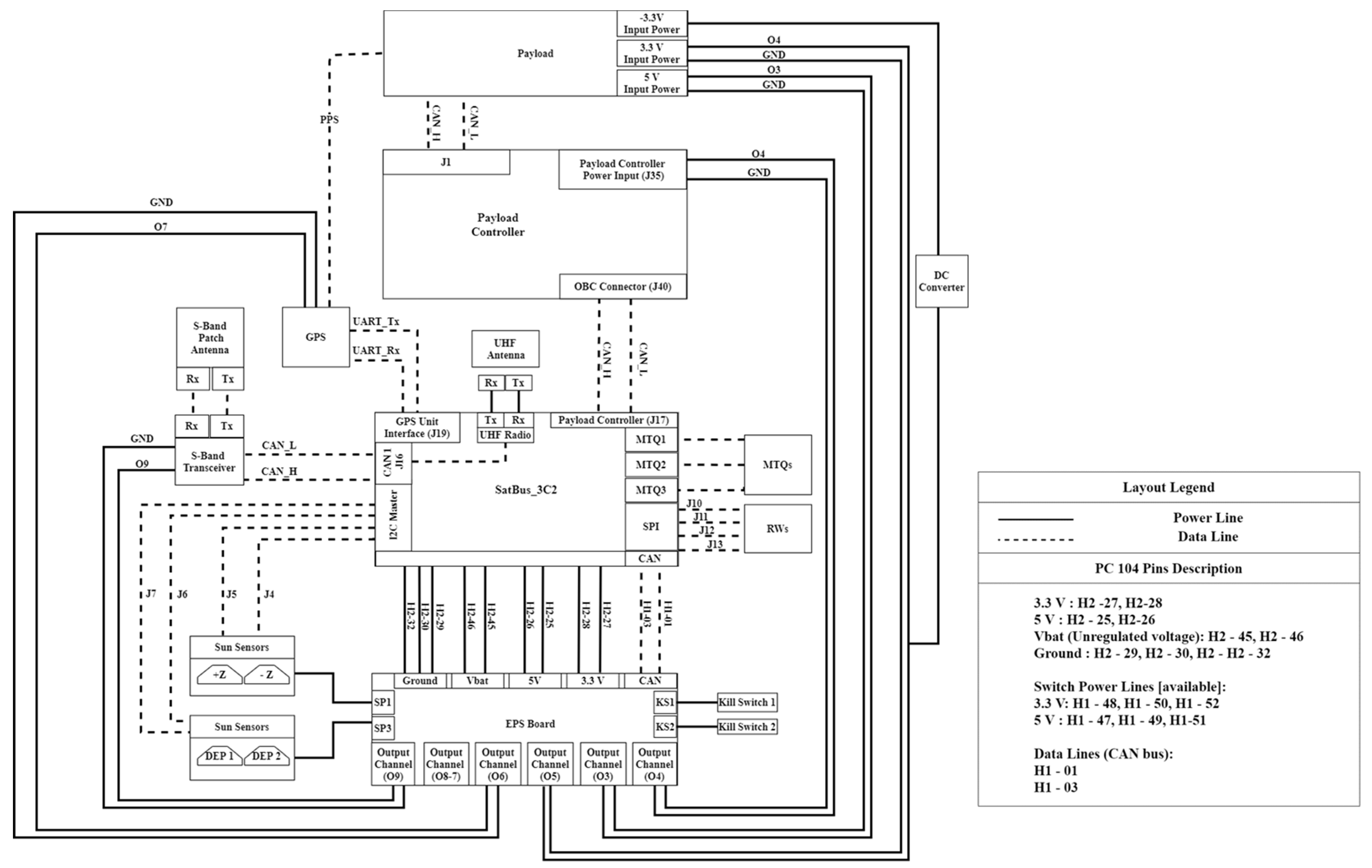
3.2. Power Subsystem
3.3. Command and Data Handling Subsystem
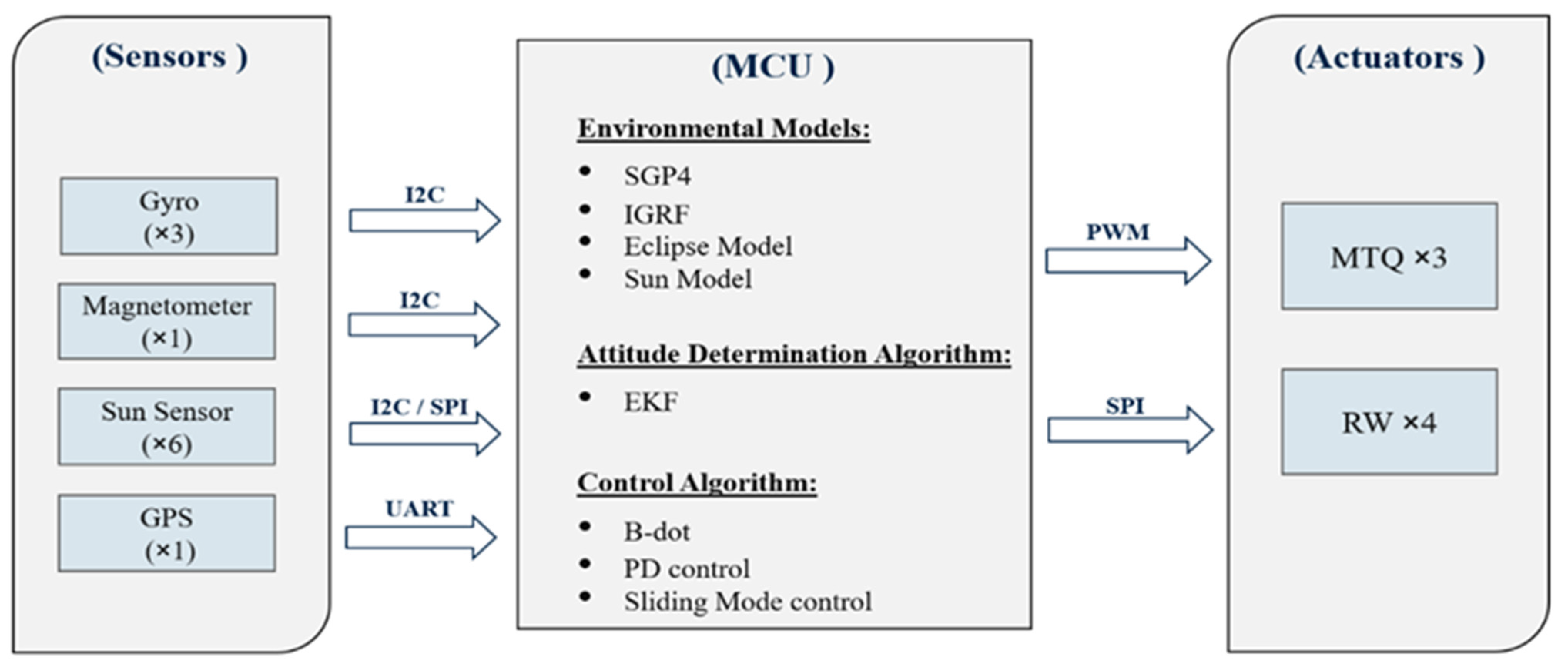
3.4. Attitude Determination and Control Subsystem
3.5. Communication Subsystem
4. Design Analysis
4.1. Ballistic Number
4.2. Mass Budget
4.3. Power Analysis
4.4. Data Analysis
4.4.1. Actual Data File
4.4.2. Indexing File
4.5. Telemetry Analysis
- = received power ();
- = transmitter output power ();
- = transmitter antenna gain ();
- = receiver antenna gain ();
- = transmitter feeder and connector losses ();
- = free space loss or path loss ();
- = many sided signal propagation losses ();
- = receiver feeder connector losses ().
4.6. Attitude Determination and Control Analysis
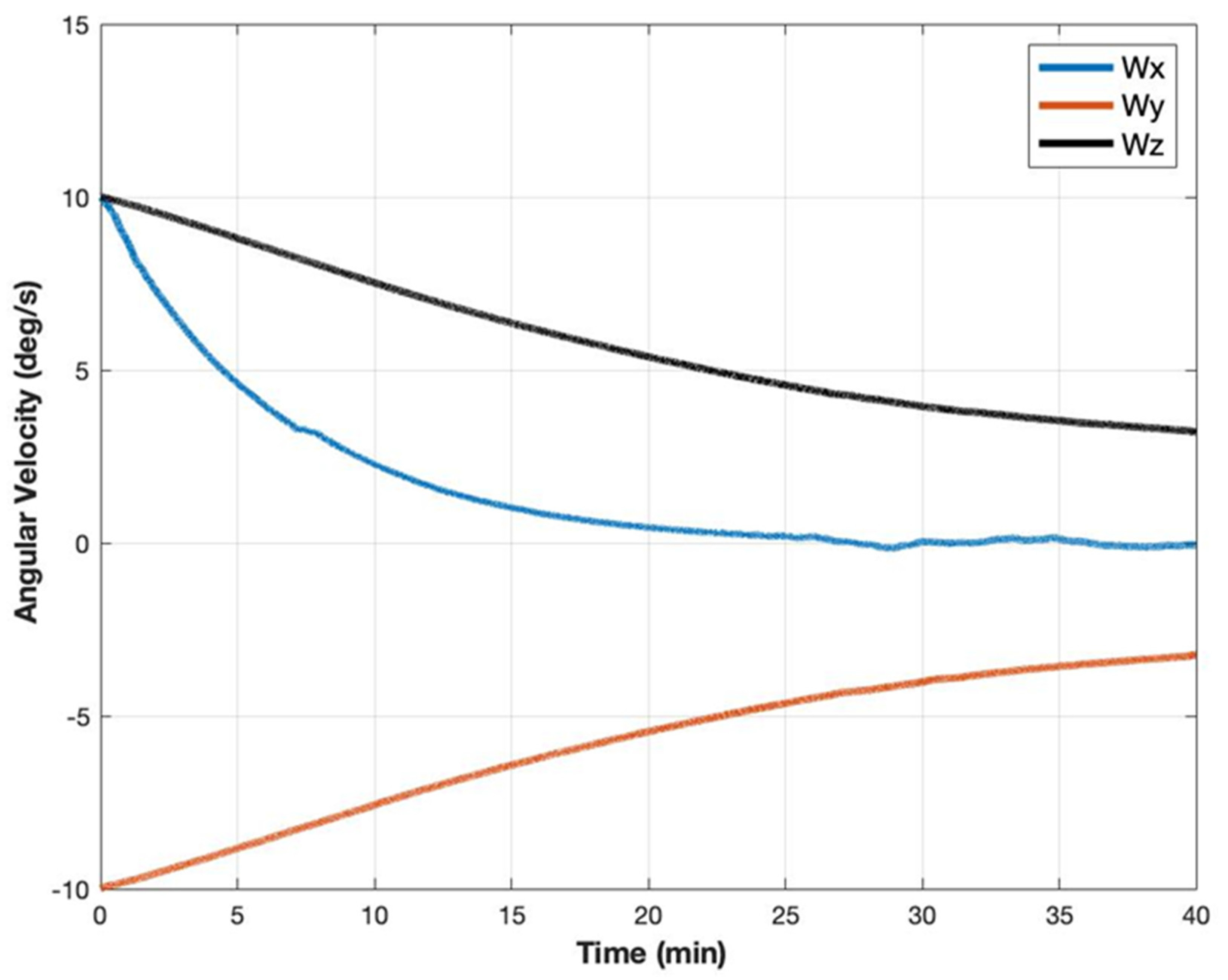
4.6.1. Detumbling
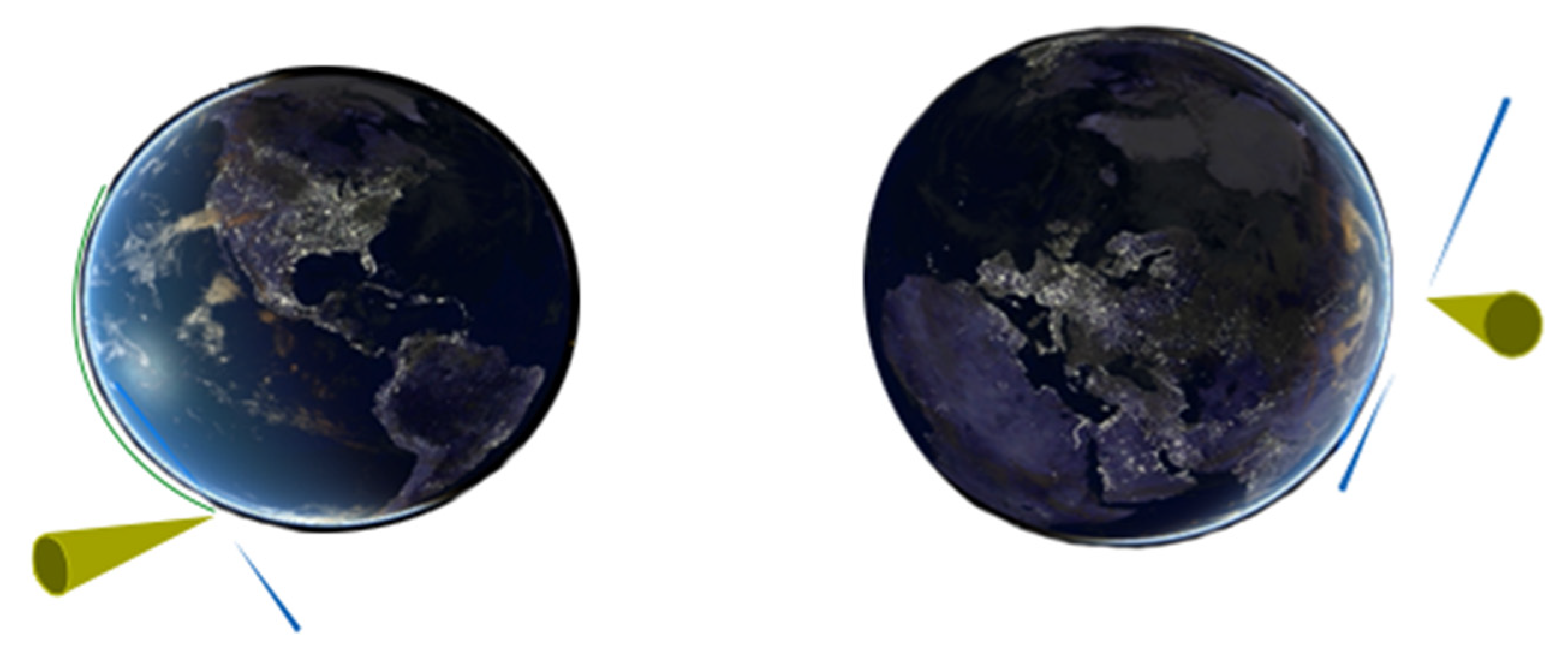
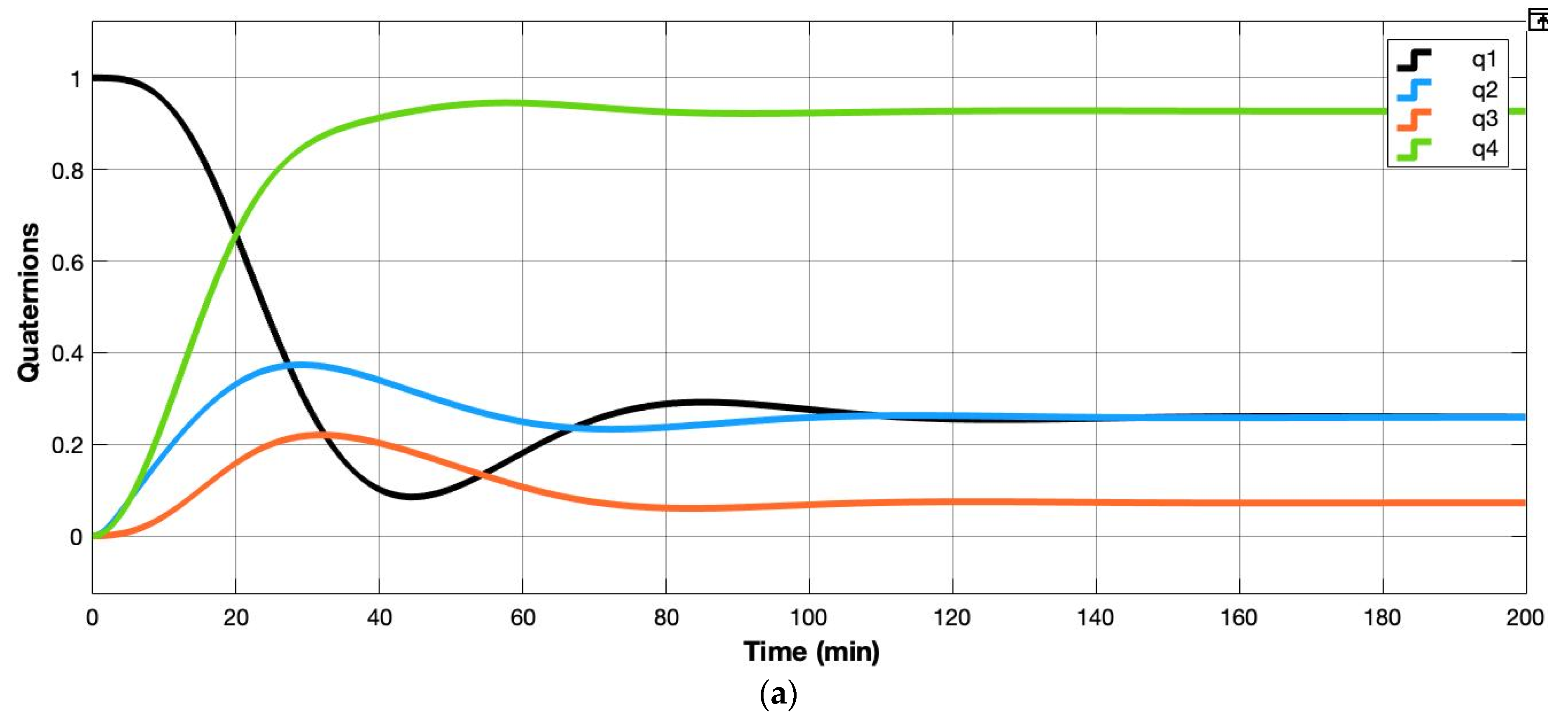
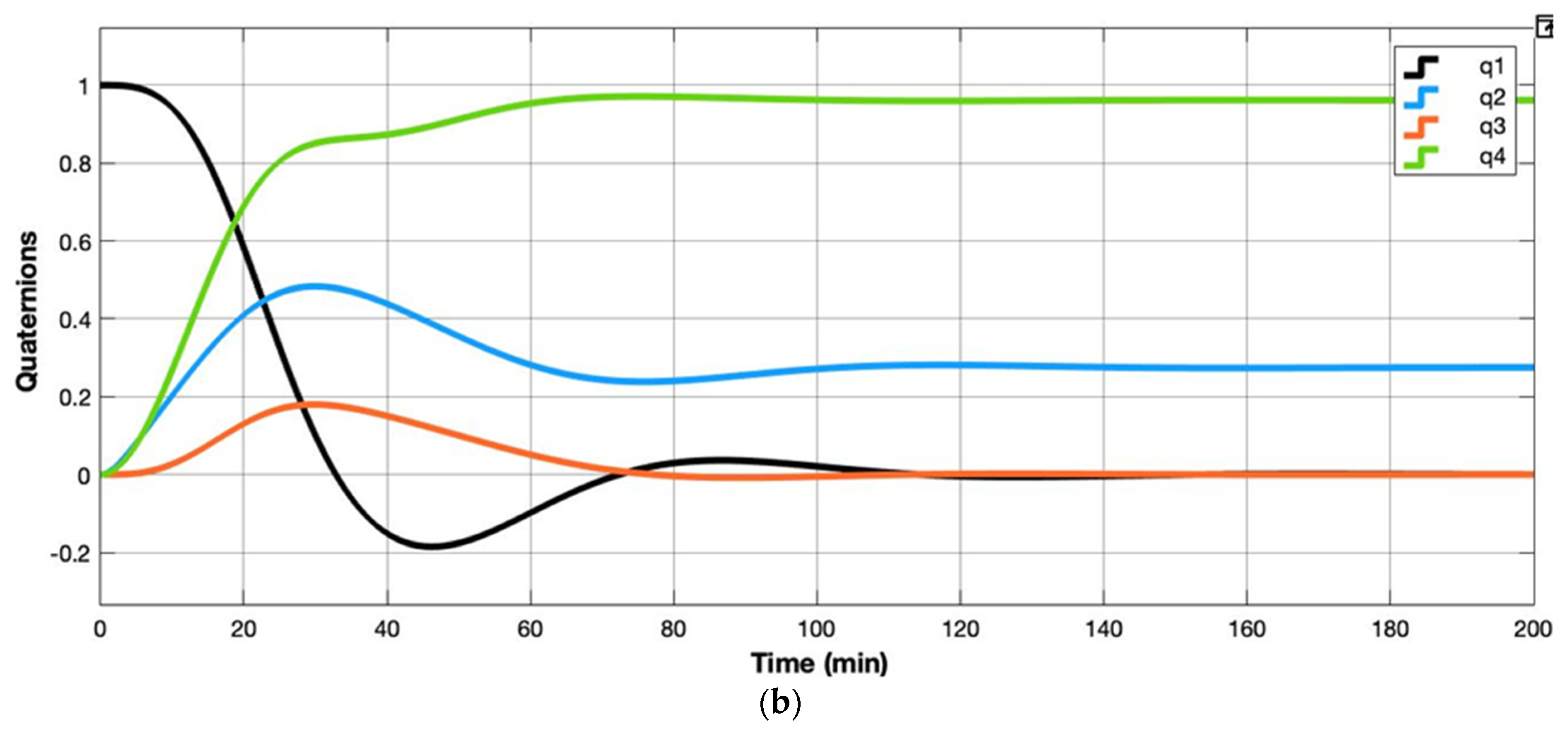
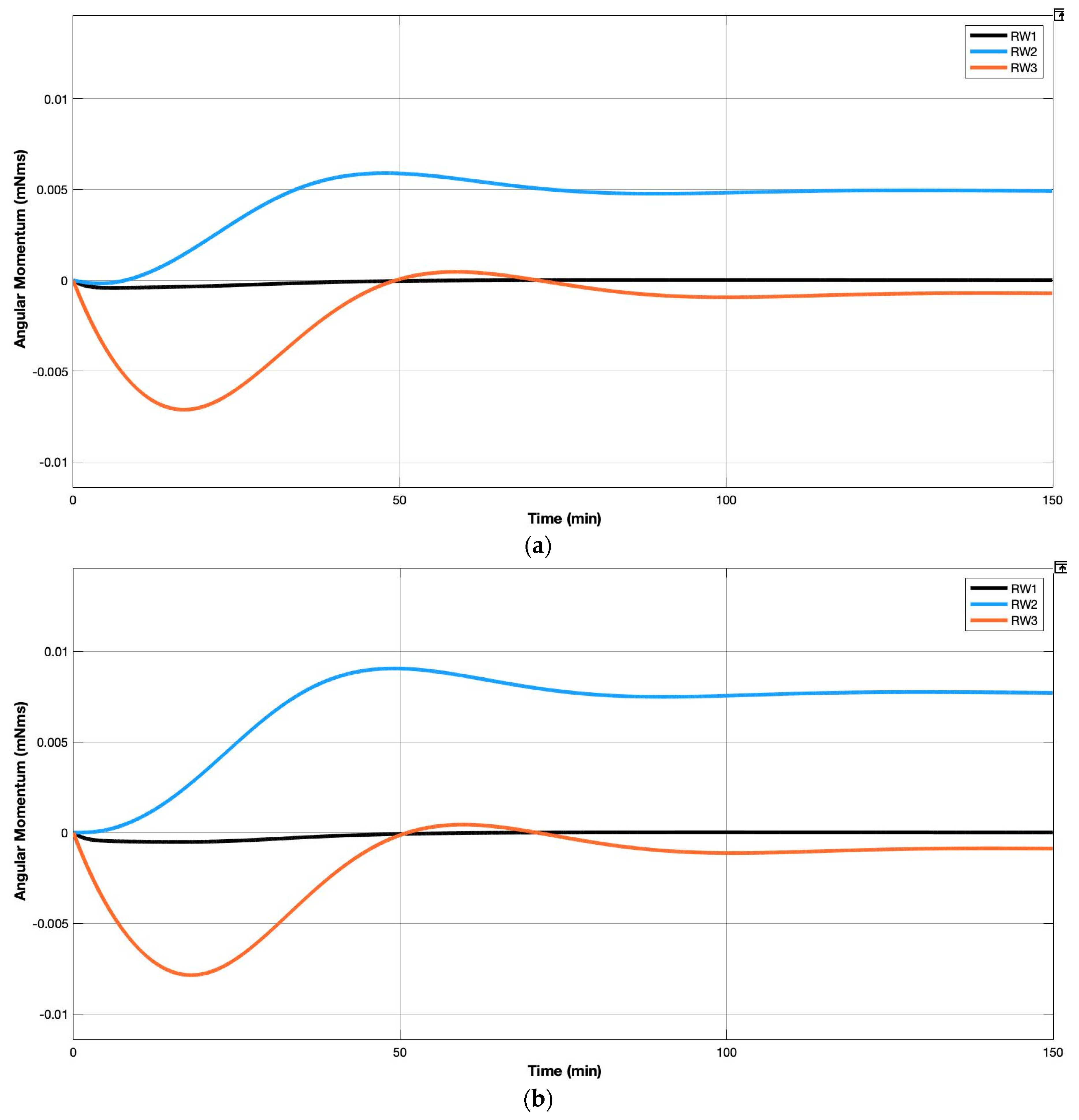
4.6.2. Attitude Pointing Analysis
4.7. Finite Element Analysis
4.7.1. 3D Model and Mesh
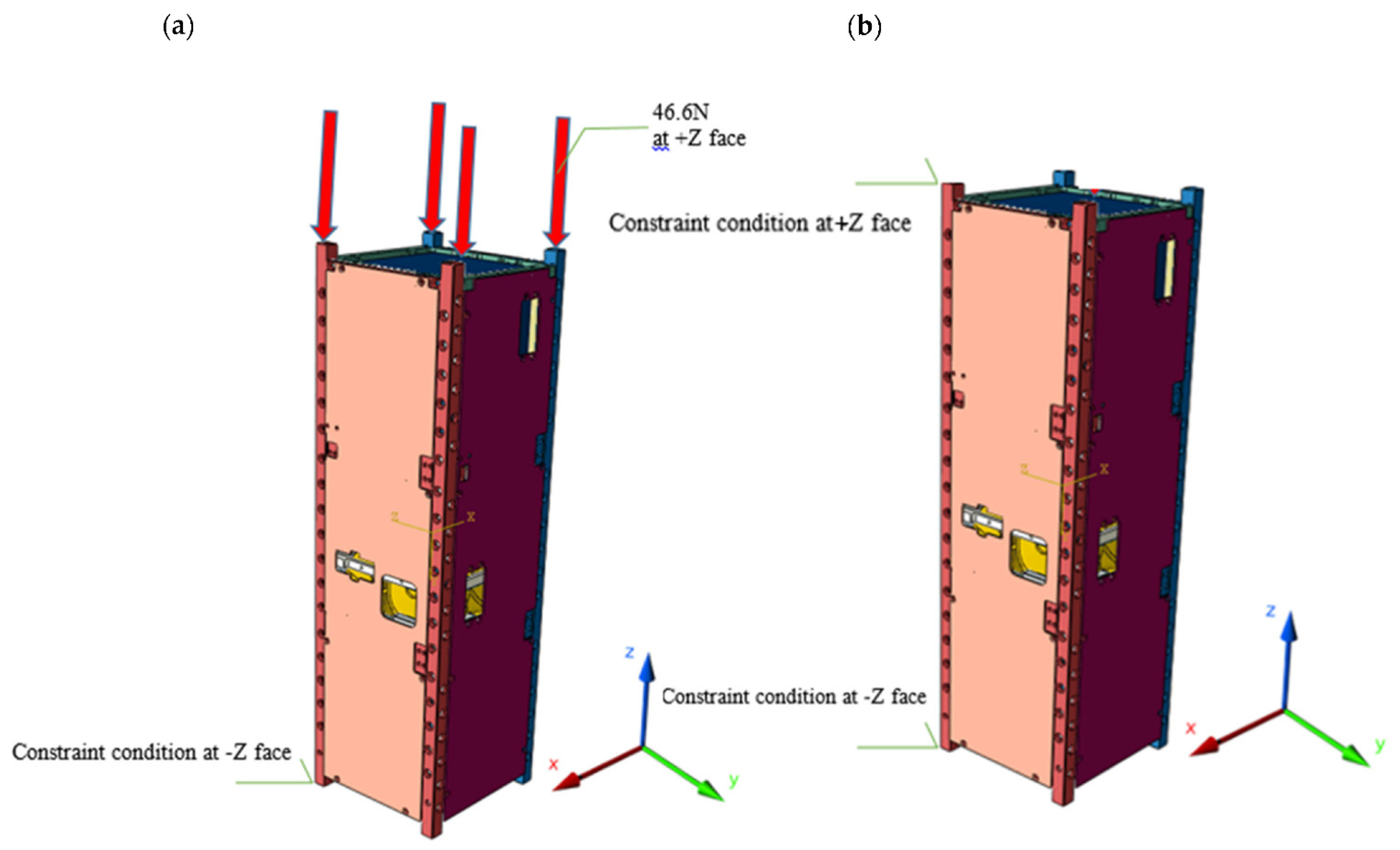
4.7.2. Boundary Conditions
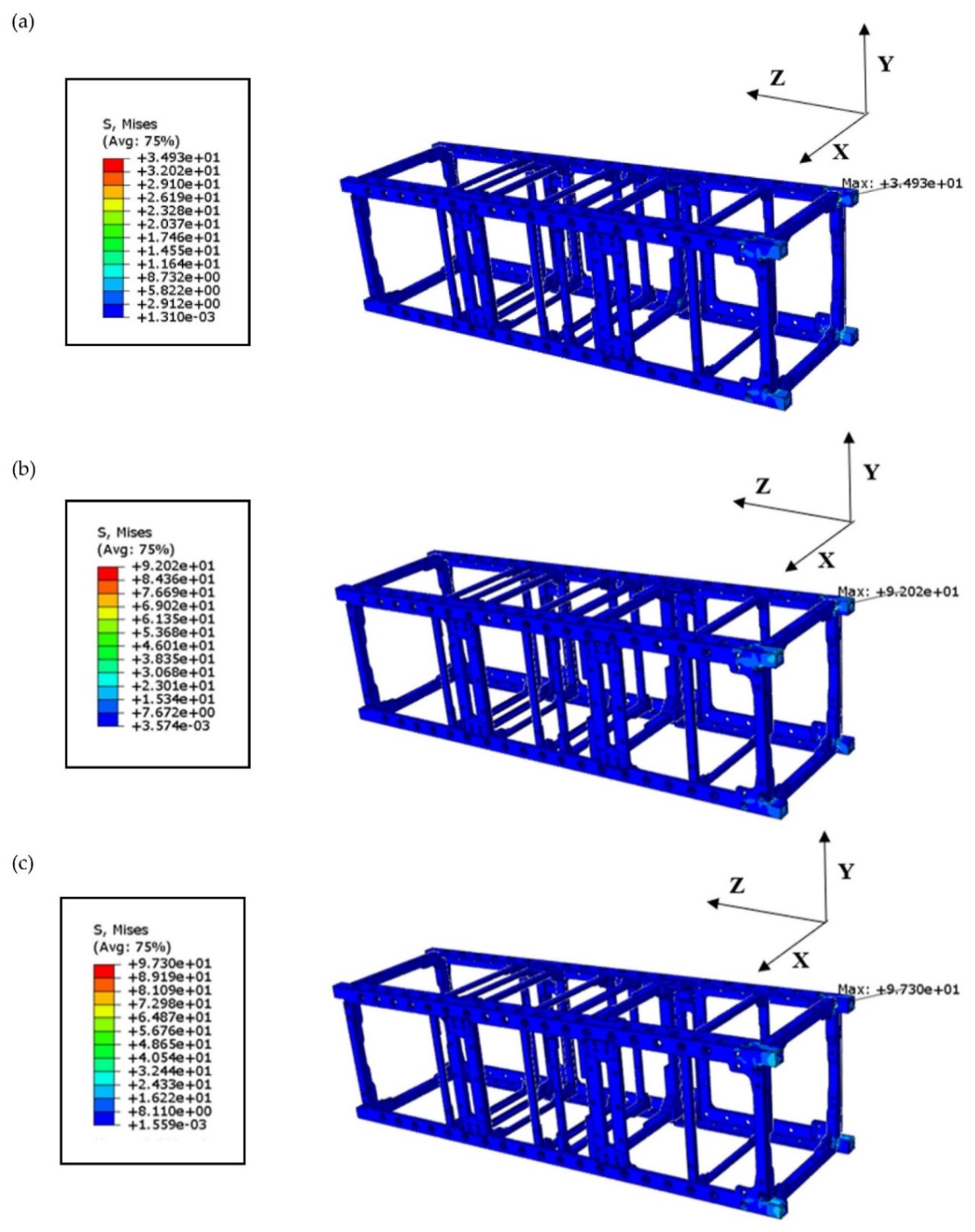
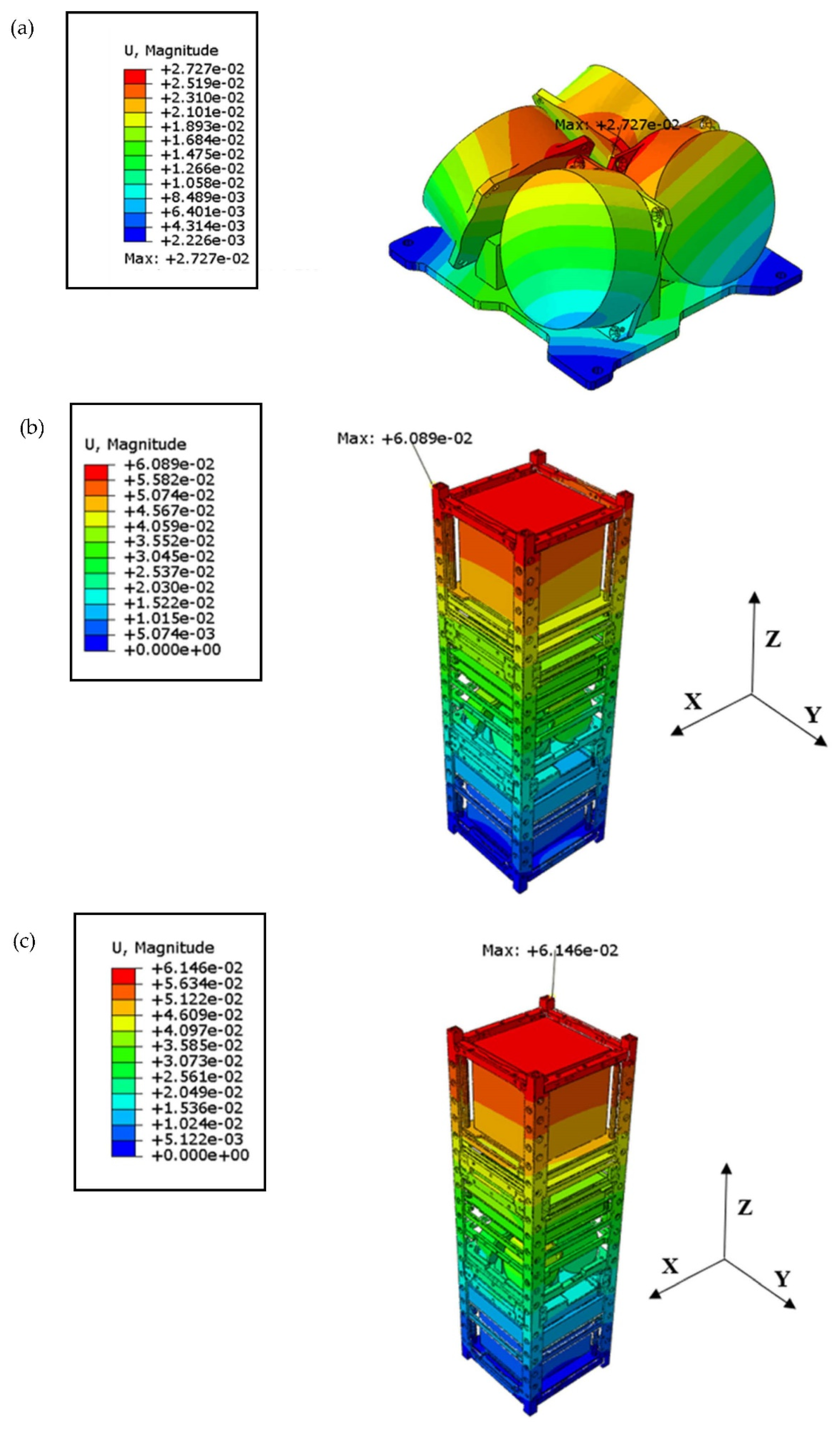
4.7.3. Quasi-Static Analysis
4.7.4. Modal Analysis
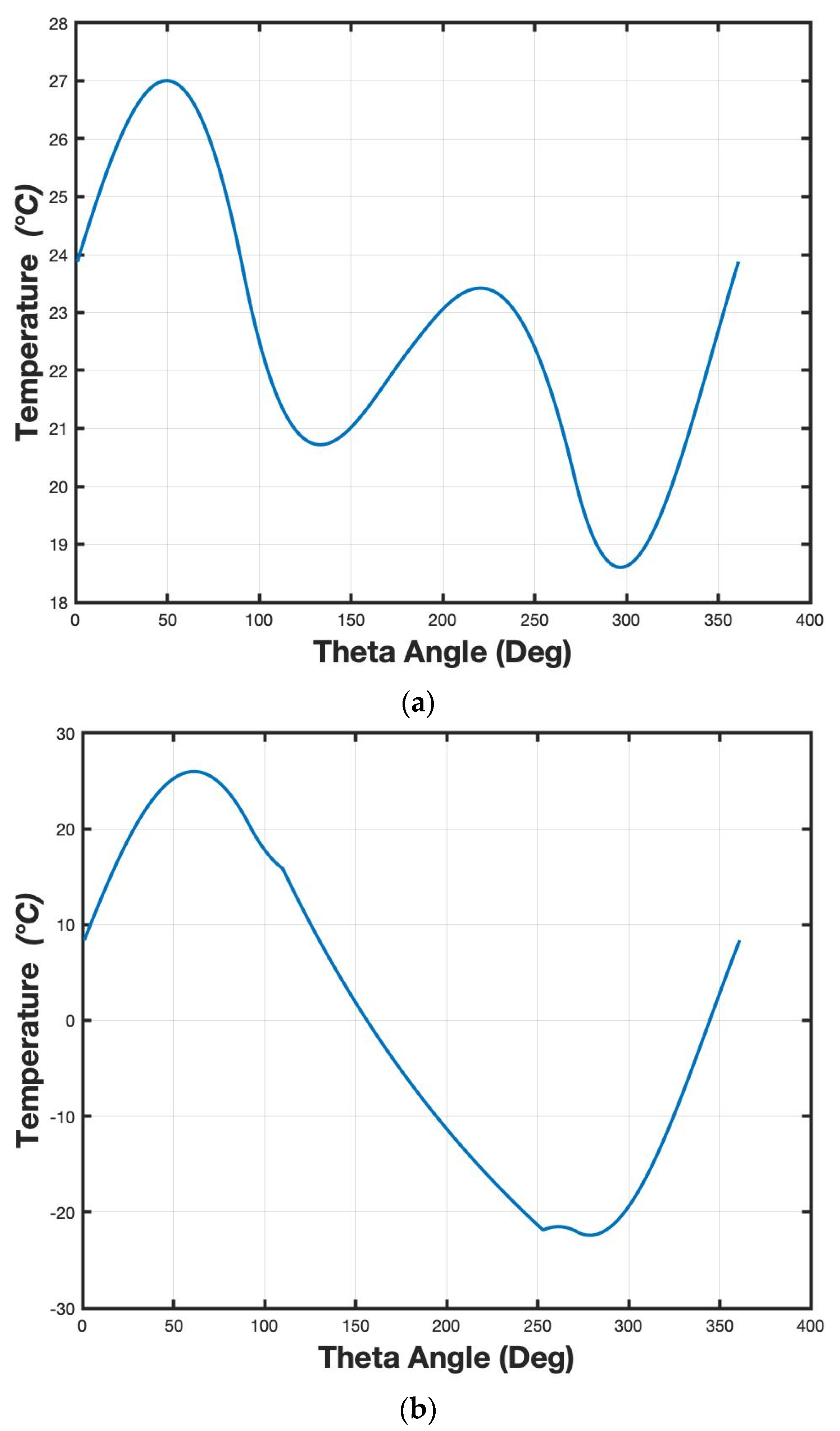
4.8. Thermal Analysis
5. Testing Plans
5.1. Vibration Test
5.2. Thermal Vacuum Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Arneodo, F.; Di Giovanni, A.; Marpu, P. A Review of Requirements for Gamma Radiation Detection in Space Using CubeSats. Appl. Sci. 2021, 11, 2659. [Google Scholar] [CrossRef]
- Di Giovanni, A.; Manenti, L.; AlKhouri, F.; AlKindi, L.R.; AlMannaei, A.; Al Qasim, A.; Benabderrahmane, M.L.; Bruno, G.; Conicella, V.; Fawwaz, O.; et al. Characterisation of a CeBr3 (LB) detector for space application. J. Instrum. 2019, 14, P09017. [Google Scholar] [CrossRef]
- Japan Aerospace Exploration Agency (JAXA). Small Satellite Deployment Interface Control Document Version D. In JEM Payload Accomodation Handbook; Japanese Aerospace Exploration Agency (JAXA): Tokyo, Japan, 2020; Volume 8. [Google Scholar]
- Osman, I.T. Design and Implementation of Eps (Electrical Power System) of a Cubesat. Ph.D. Thesis, University of Khartoum, Khartoum, Sudan, 2012. [Google Scholar]
- Politecnico Di Torino. e-st@r-II Program: Commands and Telemetry. 20 April 2016. Available online: https://www.passion-radio.org/images-blog/Estar2.10_Commands-and-telemetry_Pub_I1_R0.pdf (accessed on 30 April 2020).
- AAUSAT-4. Spacelink Format. 21 April 2016. Available online: http://www.space.aau.dk (accessed on 30 April 2020).
- MathWorks®. International Geomagnetic Reference Field. Available online: https://www.mathworks.com/help/aeroblks/internationalgeomagneticreferencefield.html (accessed on 17 February 2021).
- Alhammadi, A.N.; Jarrar, F.; Al-Shaibah, M.; Almesmari, A.; Vu, T.; Tsoupos, A.; Marpu, P. Effect of Finite Element Model Details in Structural Analysis of CubeSats. CEAS Space J. 2021, 13, 231–246. [Google Scholar] [CrossRef]
- MatWeb Material Property Data. Aluminum 7075-T6; 7075-T651. Available online: http://www.matweb.com/search/DataSheet.aspx?MatGUID=4f19a42be94546b686bbf43f79c51b7d (accessed on 27 April 2020).
- ASM Aerospace Specification Metals Inc. AISI Type 304 Stainless Steel. Available online: http://asm.matweb.com/search/SpecificMaterial.asp?bassnum=mq304a (accessed on 27 April 2020).
- Alhammadi, A.; Al-Shaibah, M.; Almesmari, A.; Vu, T.; Tsoupos, A.; Jarrar, F.; Marpu, P. Quasi-Static and Dynamic Response of a 1U Nano-Satellite during Launching. In Proceedings of the 8th European Conference for Aeronautics and Space Sciences (EUCASS), Madrid, Spain, 1–4 July 2019. [Google Scholar]
- CubeSat Wizard. Available online: https://cubesatwizard.com/ (accessed on 11 October 2020).
- Martinez, I. Thermo-Optical Properties. Available online: http://webserver.dmt.upm.es/~isidoro/dat1/Thermooptical.pdf (accessed on 1 June 2021).
- QB 50. System Requirements and Recommendations Issue 6. 9 July 2014. Available online: https://www.qb50.eu/index.php/tech-docs/category/QB50_system_requirements_issue_606e0.pdf?download=58:qb50-docs (accessed on 27 April 2020).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Component |
|---|---|
| 1 | CubeSat structure |
| 2 | Payload controller |
| 3 | Electric power system |
| 4 | Onboard computer |
| 5 | Solar panel Z+ PCB (GPS) |
| 6 | Solar panel Z− PCB (S-band) |
| 7 | Deployable solar panel |
| 8 | GPS patch antenna |
| 9 | S-band patch antenna |
| 10 | Sun sensor |
| 11 | Reaction wheels 4W set |
| 12 | S band transceiver |
| 13 | GPS receiver |
| 14 | RF splitter |
| 15 | 3- axes magnetorquers |
| 16 | PMT detector (payload) |
| 17 | SiPM detector (payload) |
| S. No | Subsystem | Component | |
|---|---|---|---|
| 1 | Structure + Platform Bus | 3U frame | 634.35 |
| 2 | deployable release mechanism holder | ||
| 3 | reaction wheel mount | ||
| 4 | EPS shield | ||
| 5 | GPS receiver mount | ||
| 6 | SiPM payload holder ring | ||
| 7 | payload controller | ||
| 8 | miscellaneous | ||
| 9 | Power Subsystem | EPS | 683.16 |
| 10 | solar panels | ||
| 11 | Sun sensors | ||
| 12 | Command and Data Handling Subsystem | on-board computer | 124.65 |
| 13 | Attitude Determination and Control Subsystem | reaction wheels | 1057.4 |
| 14 | magnetorquers | ||
| 15 | Communication Subsystem | GPS patch antenna | 347.20 |
| 16 | GPS receiver | ||
| 17 | band patch antenna | ||
| 18 | band receiver | ||
| 19 | RF splitter | ||
| 20 | Payload | PMT detector | 2051.0 |
| 21 | SiPM detector | ||
| Total mass () | 4897.8 | ||
| Total mass w/5% margin for wiring and harnessing () | 5040.1 | ||
| Pointing Mode | ||
|---|---|---|
| Nadir | 5.300 | 8.170 |
| Sun horizon | 10.12 | 15.60 |
| Full Sun Tracking | 13.19 | 20.33 |
| Normal Mode Duty Cycle (%) | Target Pointing Mode Duty Cycle (%) | Safe Mode Duty Cycle (%) | |||
|---|---|---|---|---|---|
| EPS | 165.00 | 100 | 100 | 100 | |
| OBC | 363.00 | 100 | 100 | 100 | |
| ADCS | Fine sun sensors | 87.120 | 100 | 100 | 0 |
| GPS antenna | 16.500 | 100 | 100 | 0 | |
| GPS receiver | 145.20 | 100 | 100 | 0 | |
| M6P magnetorquers (Rod) | 935.00 | 0 | 8.60 | 0 | |
| X, Y-axis magnetorquers | 440.00 | 0 | 8.60 | 0 | |
| Z-axis magnetorquers | 429.00 | 0 | 8.60 | 0 | |
| 4 reaction wheel (steady) | 660.00 | 100 | 100 | 100 | |
| COM | UHF TX | 5808.0 | 6.70 | 13.7 | 6.70 |
| UHF RX | 254.10 | 100 | 100 | 100 | |
| S-band | 5500.0 | 0 | 12.4 | 0 | |
| Payload | 6490.0 | 100 | 100 | 0 | |
| ) | 13,209 | 15,072 | 2954.3 | ||
| Total Downlinked Data Using Minimum Access Time | ||||
| Downlink rate () | 1200 | 2400 | 4800 | 9600 |
| Total download size () | 0.060 | 0.110 | 0.230 | 0.450 |
| Total Downlinked Data Using Average Access time | ||||
| Downlink rate () | 1200 | 2400 | 4800 | 9600 |
| Total download size () | 0.120 | 0.250 | 0.490 | 0.980 |
| Uplink | Downlink | |
|---|---|---|
| Maximum Distance () | 2300 | |
| Frequency () | 435 | |
| Data rate () | 2400 | |
| Bandwidth () | 14,400 | |
| Transmitter power () | 13.97 | 3.000 |
| UHF Tx antenna gain () | 12.24 | −2.000 |
| Cable losses () | 2.310 | 0.600 |
| Total losses () | 156.2 | 156.14 |
| UHF antenna gain () | 2.030 | 12.90 |
| Line losses ( | 2.310 | 2.410 |
| System Noise Temperature () | 241.5 | 342.9 |
| EIRP | 23.90 | 0.400 |
| System Eb/No | 32.42 | 40.27 |
| Required Eb/No | 14.00 | 18.00 |
| Margin ( | 18.42 | 22.27 |
| S-Band Downlink (Eb/No) Method | ||||||||
|---|---|---|---|---|---|---|---|---|
| Calculating path distance | ||||||||
| Earth radius () | 6371 | 6371 | 6371 | 6371 | 6371 | 6371 | 6371 | 6371 |
| Orbit () | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 400 |
| Elevation angle (°) | 0 | 5 | 10 | 20 | 30 | 40 | 50 | 60 |
| Distance () | 2292.8 | 1803.8 | 1439.4 | 984.03 | 739.31 | 598.14 | 511.72 | 457.41 |
| S-band transmitter specifications | ||||||||
| Downlink Frequency () | 2300 | 2300 | 2300 | 2300 | 2300 | 2300 | 2300 | 2300 |
| Data rate () | 128,000 | 128,000 | 128,000 | 128,000 | 128,000 | 128,000 | 128,000 | 128,000 |
| Bandwidth () | 650,000 | 650,000 | 650,000 | 650,000 | 650,000 | 650,000 | 650,000 | 650,000 |
| S-band Transmitter () | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| S-band antenna gain () | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 |
| Ground station specifications | ||||||||
| S-band receiver gain | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 |
| S-band antenna gain () | 31 | 31 | 31 | 31 | 31 | 31 | 31 | 31 |
| Line Losses | 2.31 | 2.31 | 2.31 | 2.31 | 2.31 | 2.31 | 2.31 | 2.31 |
| System Noise Temperature | 230 | 170 | 161 | 156 | 154 | 154 | 154 | 153 |
| Losses | ||||||||
| Loss of polarization | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 |
| Atmospheric losses | 0.7 | 0.7 | 0.7 | 0.7 | 0.7 | 0.7 | 0.7 | 0.7 |
| Satellite Cable Losses | 0.6 | 0.6 | 0.6 | 0.6 | 0.6 | 0.6 | 0.6 | 0.6 |
| Free Space Losses () | 166.88 | 164.79 | 162.83 | 159.53 | 157.05 | 155.21 | 153.85 | 152.88 |
| Downlink margin | ||||||||
| Satellite EIRP | 3.4 | 3.4 | 3.4 | 3.4 | 3.4 | 3.4 | 3.4 | 3.4 |
| Isotropic Signal @ GS | −164.68 | −162.59 | −160.63 | −157.33 | −154.85 | −153.01 | −151.65 | −150.68 |
| G/T | 5.07 | 6.38 | 6.62 | 6.75 | 6.81 | 6.81 | 6.81 | 6.85 |
| Boltzmann’s Constant () | −228.6 | −228.6 | −228.6 | −228.6 | −228.6 | −228.6 | −228.6 | −228.6 |
| Signal to noise power S/No | 68.99 | 72.38 | 74.58 | 78.02 | 80.56 | 82.40 | 83.75 | 84.77 |
| System Eb/No | 17.91 | 21.31 | 23.51 | 26.95 | 29.49 | 31.33 | 32.68 | 33.69 |
| Required Eb/No | 13 | 13 | 13 | 13 | 13 | 13 | 13 | 13 |
| Margin | 4.910 | 8.310 | 10.51 | 13.95 | 16.49 | 18.33 | 19.68 | 20.69 |
| Input | Value |
|---|---|
| Moment of Inertia () | [9.71 × 10−3, −2.80 × 10−5, −4.86 × 10−4; −2.80 × 10−5, 6.56 × 10−2, 3.76 × 10−5; −4.86 × 10−4, 3.76 × 10−5, 6.56 × 10−2] |
| Altitude () | 400 |
| Inclination () | 51.6 |
| Input | Value |
|---|---|
| Moment of Inertia () | [9.71 × 10−3, −2.80 × 10−5, −4.86 × 10−4; −2.80 × 10−5, 6.56 × 10−2, 3.76 × 10−5; −4.86 × 10−4, 3.76 × 10−5, 6.56 × 10−2] |
| Initial attitude (Quaternions) | [1 0 0 0] |
| Desired attitude (Quaternions) | [0.0001 0.2754 0 0.9613] (Aalborg worst attitude [0.2592 0.2592 0.0724 0.9276] (Vilnius worst attitude) [0.2021 0.6959 0.2148 0.6548] (Full Sun tracking worst attitude) [0.9924 0.0868 0.0868 0.0076] (Sun horizon worst attitude) |
| Proportional gain (Kp) | 0.001 |
| Derivative gain (Kd) | 0.0055 |
| Initial angular rate () | [0 0 0] |
| Environmental disturbances () | [−3.0255 × 10−7 −3.5739 × 10−5 −3.2116 × 10−9] |
| Part | Poisson’s Ratio | ||||
|---|---|---|---|---|---|
| Frame | - | - | 2.81 | 71,700 | 0.330 |
| Rods | - | - | 8.00 | 200,000 | 0.290 |
| Spacers | - | - | 8.00 | 200,000 | 0.290 |
| Reaction wheels | 642.00 | 177 | 3.62 | 24,000 | 0.136 |
| Magnetorquers | 205.00 | 94.3 | 2.17 | 24,000 | 0.136 |
| S-band Receiver | 190.00 | 102 | 1.87 | 24,000 | 0.136 |
| GPS Receiver | 50.000 | 38.4 | 1.30 | 24,000 | 0.136 |
| EPS | 194.00 | 53.2 | 3.65 | 24,000 | 0.136 |
| On-board Computer | 103.21 | 29.5 | 3.50 | 24,000 | 0.136 |
| Payload controller PCB | 53.380 | 23.9 | 2.23 | 24,000 | 0.136 |
| Payload 1 | 1130.0 | 454 | 2.49 | 24,000 | 0.136 |
| Payload 2 | 942.00 | 345 | 2.73 | 24,000 | 0.136 |
| GPS patch antenna | 36.000 | 6.35 | 5.67 | 24,000 | 0.136 |
| S-band patch antenna | 60.900 | 27.1 | 2.25 | 24,000 | 0.136 |
| Load | X axis | Y axis | Z axis |
|---|---|---|---|
| Analysis A | |||
| Compressive () | - | - | 46.6 |
| Static () | 9 | - | - |
| Analysis B | |||
| Compressive () | - | - | 46.6 |
| Static () | - | 9 | - |
| Analysis C | |||
| Compressive () | - | - | 46.6 |
| Static () | - | - | 9 |
| Load Along X Case A | Load Along Y Case B | Load Along Z Case C | ||||
|---|---|---|---|---|---|---|
| Max | Location | Max | Location | Max | Location | |
| Von Misses stresses () | 41.16 | reaction wheels board | 92.02 | Al frame | 97.3 | Al frame |
| Deflection () | 0.027 | reaction wheels | 0.061 | Al frame | 0.061 | Al frame |
| Part | Material | Yield | Ultimate | ||||
|---|---|---|---|---|---|---|---|
| ≥ 0 = 1.5 | ≥ 0 = 2 | ||||||
| Analysis A | |||||||
| Frame | Al 7075-T651 | 34.93 | 502 | 585 | 8.580 | 7.370 | 5.970 |
| Rod | Stainless steel | 11.83 | 205 | 515 | 10.55 | 20.77 | 2.290 |
| Spacers | Al 7075-T651 | 9.980 | 502 | 585 | 32.25 | 28.31 | 1.710 |
| Reaction wheels board | FR-4 | 41.16 | - | 310 | - | 2.77 | 13.28 |
| Analysis B | |||||||
| Frame | Al 7075-T651 | 92.02 | 502 | 585 | 2.640 | 2.180 | 15.73 |
| Rod | Stainless steel | 11.86 | 205 | 515 | 10.52 | 20.71 | 2.300 |
| Spacers | Al 7075-T651 | 12.19 | 502 | 585 | 26.45 | 22.99 | 2.080 |
| Reaction wheels board | FR-4 | 72.08 | - | 310 | - | 1.130 | 23.25 |
| Analysis C | |||||||
| Frame | Al 7075-T651 | 97.30 | 502 | 585 | 1.860 | 2.010 | 16.63 |
| Rod | Stainless steel | 11.83 | 205 | 515 | 10.55 | 20.77 | 2.290 |
| Spacers | Al 7075-T651 | 10.98 | 502 | 585 | 29.48 | 25.64 | 1.880 |
| Reaction wheels board | FR-4 | 49.50 | - | 310 | - | 2.130 | 15.97 |
| Parameter | Value |
|---|---|
| Mass | 5.22 |
| Inclination angle | i = 51.6° |
| Inclination angle | i = 51.6° |
| Surface area average emissivity, ε | 0.8 [13] |
| Surface area average absorptivity, α | 0.8 [13] |
| Specific heat, | 470 |
| Albedo constant | 0.3 |
| Generated heat from the electronics | 2 W |
| Planet temperature | 288 °K |
| Hot Case | Cold Case | |
|---|---|---|
| Estimated date | 11-December-2021 | 26-May-2022 |
| Beta angle | −71.3° | −0.27° |
| Temperature | 27 °C | −21.0 °C |
| 10–2000 | 0.5 | 1 |
| HTV | Dragon | Cygnus | |||
|---|---|---|---|---|---|
| 20 | 0.005 | 20 | 0.02 | 20 | 0.004 |
| 50 | 0.02 | 200 | 0.02 | 30 | 0.004 |
| 120 | 0.031 | 2000 | 0.001 | 70 | 0.015 |
| 230 | 0.031 | 150 | 0.015 | ||
| 1000 | 0.0045 | 2000 | 0.0006 | ||
| 2000 | 0.0013 | - | - | - | - |
| Overall (grms) | 4.05 | Overall (grms) | 3.2 | Overall (grms) | 2.44 |
| Duration (s) | 60 | Duration (s) | 60 | Durations (s) | 60 |
| Thermal Test Environments | |
|---|---|
| HTV | +5~+32 |
| Dragon | +18.3~+29.4 |
| Cygnus | +10~+46.1 |
| Inside the ISS | +16.7~+29.4 |
| Outside the ISS (when the satellite is inside the J-SSOD) | −15~+60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almazrouei, A.; Khan, A.; Alhembar, A.; Albuainain, A.; Bushlaibi, A.; Al Mahmood, A.; Alqaraan, A.; Alhammadi, A.; AlBalooshi, A.; Khater, A.; et al. A Complete Mission Concept Design and Analysis of the Student-Led CubeSat Project: Light-1. Aerospace 2021, 8, 247. https://doi.org/10.3390/aerospace8090247
Almazrouei A, Khan A, Alhembar A, Albuainain A, Bushlaibi A, Al Mahmood A, Alqaraan A, Alhammadi A, AlBalooshi A, Khater A, et al. A Complete Mission Concept Design and Analysis of the Student-Led CubeSat Project: Light-1. Aerospace. 2021; 8(9):247. https://doi.org/10.3390/aerospace8090247
Chicago/Turabian StyleAlmazrouei, Aaesha, Aaliya Khan, Abdulla Alhembar, Ahmed Albuainain, Ahmed Bushlaibi, Ali Al Mahmood, Ali Alqaraan, Alya Alhammadi, Amina AlBalooshi, Ashraf Khater, and et al. 2021. "A Complete Mission Concept Design and Analysis of the Student-Led CubeSat Project: Light-1" Aerospace 8, no. 9: 247. https://doi.org/10.3390/aerospace8090247
APA StyleAlmazrouei, A., Khan, A., Alhembar, A., Albuainain, A., Bushlaibi, A., Al Mahmood, A., Alqaraan, A., Alhammadi, A., AlBalooshi, A., Khater, A., Alharam, A., AlTawil, B., Alkhzaimi, B., Almansoori, E., Jarrar, F., Issa, H., Alblooshi, H., Ansari, M. T., Alzaabi, N., ... Alqassab, Y. (2021). A Complete Mission Concept Design and Analysis of the Student-Led CubeSat Project: Light-1. Aerospace, 8(9), 247. https://doi.org/10.3390/aerospace8090247