1. Introduction
The popularity of the use of small drones in recent years has grown greatly, especially for entertainment and leisure purposes. This sparked an increase in research on the possibility of using these aircraft for a wide range of missions, from package delivery services [
1] to urban air mobility [
2] and infrastructure surveillance [
3]. However, if small aircraft are to become a core transportation method in cities, new air traffic management systems need to be developed in order to handle the issues and obstacles that this environment creates.
Compared to conventional airspace, urban airspace has a higher degree of complexity [
4]. Because operations take place at a lower altitude, factors such as obstacles, local weather, and privacy considerations have a greater influence in this type of airspace. There is currently no established procedure for how aircraft should safely and efficiently navigate this kind of airspace [
5]. While several initial concepts of operations have been created [
6,
7,
8], the rules for new types of airspace still need to be investigated and set.
One of the airspace volumes for which research and development is still ongoing for the creation of a common set of rules is the “Zu” volume, defined as urban airspace controlled by a U-space system [
9]. The lower part of this volume, defined as very-low-level (VLL) airspace (i.e., airspace between ground level and an altitude of 500 ft [
10]), might host a very high volume of small aircraft traffic in the future.
The Metropolis II project sought to investigate the impact of the degree of centralisation in terms of separation management on the efficacy of a U-space air traffic control system. Both ends of the centralisation spectrum imply advantages and disadvantages: an air traffic control architecture focused around a central authority (as used in conventional air traffic control) has the potential to better optimise airspace use [
11], while a decentralised approach (comparable to how car traffic is organised) has the benefit of being more responsive to unexpected events (i.e., weather, congestion) and can more easily handle large volumes of aircraft [
12]. The Metropolis II project results show that a combination of decentralised and centralised elements (i.e., a hybrid concept) provides a system architecture that includes the benefits of both ends of the centralisation spectrum [
13].
The research at hand focuses on improving the tactical conflict prevention, detection, and resolution (CPD&R) component of urban small aircraft operations, with the aim of providing the insight and tools necessary for a better integration within a future hybrid U-space air traffic control architecture. Such an architecture will need to include both a centralised, strategic component, and a decentralised, tactical one. The paper is structured as follows:
Section 2 presents a summary of the decentralised air traffic management concept of operations developed within the Metropolis II project, as well as the proposed improvements for the tactical CPD&R module of the concept;
Section 3 explains the experimental environment and conditions used to simulate traffic scenarios;
Section 4 and
Section 5 contain the results and discussion on the observed effects of the modifications on airspace safety and efficiency. Lastly,
Section 6 presents the conclusions and recommendations for future research.
2. Methods
The following section presents a brief description of the decentralised concept of operations we developed within the Metropolis II project [
14], with an emphasis on the tactical conflict detection and resolution (CD&R) algorithm, together with the proposed improvements to this system. More details about the concepts designed within Metropolis II can be found in the project publication database [
15].
2.1. Decentralised Air Traffic Management Principles
A decentralised air traffic management system is hypothesised to offer several benefits in the high-air-traffic-density situations of VLL airspace, including scalability and a high level of fairness [
16]. By distributing the separation responsibility among operators, operational bottlenecks associated with a highly centralised system are potentially mitigated. The decentralised concept of operations described in the paper at hand is designed according to the following principles, derived from [
12]:
Due to privacy and communication bottleneck considerations, minimal information is exchanged between operators;
All operators should have equal access to the airspace, and departure delays should be minimal;
All operators plan their paths individually, with minimal knowledge about the missions of other aircraft;
All deconfliction is performed tactically following predefined rules.
2.2. Urban Environment
Within the Metropolis II project, we chose to use the city of Vienna, Austria, as a subject for the development of air traffic management concepts of operation. The city authorities offer a wide range of open access information on infrastructure and demographics, such as wealth distribution and population density [
17]. Thus, realistic operational scenarios could be designed and considered by designing missions focused on parcel deliveries and emergency flights.
The U-space airspace around Vienna was taken as a circle with a radius of 8 km from the centre of the city, as shown in
Figure 1. This area was further divided into two airspace types: open airspace, representing the area on the outskirts of the city, and constrained airspace in the city centre. In open airspace, aircraft can fly direct routes, assuming that the lowest flight level is above the highest obstacle. Restricted areas, such as parks, important landmarks or cemeteries, need to be avoided. In constrained airspace, aircraft must follow the existing street network due to factors such as privacy and obstacle avoidance. It should be noted that this design choice was made to study the interactions between aircraft that occur at the border between open and constrained airspace, and does not constitute a proposal for urban airspace design.
2.3. Missions
A wide range of potential missions were included and modelled within the research presented in this paper. These were reduced to the three following fundamental types of missions, depending on their flight planning characteristics:
Hub and spoke missions, which are characterised by aircraft departing from a major vertiport (i.e., parcel distribution centres);
Point-to-point missions, in which aircraft depart and arrive from any point to any other point in the city;
Emergency missions, which take the highest priority above all other missions, but are relatively rare (0.05% of traffic).
The first two types of missions were also assigned priority levels between 1 (lowest) and 3 (highest) depending on the degree of importance of the mission. These were allocated such that an equal proportion of each priority level would be present in the airspace.
2.4. Airspace Structure
In the research at hand, we chose to design the structure such that the individual decisions of the agents are facilitated, while also setting global rules to increase traffic alignment and increase safety. This was achieved by using the method of air traffic layers and one-directional travel along streets. The first segments traffic and distributes it across set flight levels. The latter increases traffic alignment and prevents head-on conflicts.
2.4.1. Layering
The first Metropolis project showed that, by segmenting the airspace in layers and aligning aircraft in function of their relative speed, the number and severity of conflicts and intrusion events is reduced [
18]. Thus, within the concept of operations at hand, we chose to use such a structure for both constrained and open airspace, which imposes constraints on the heading range that an aircraft can select.
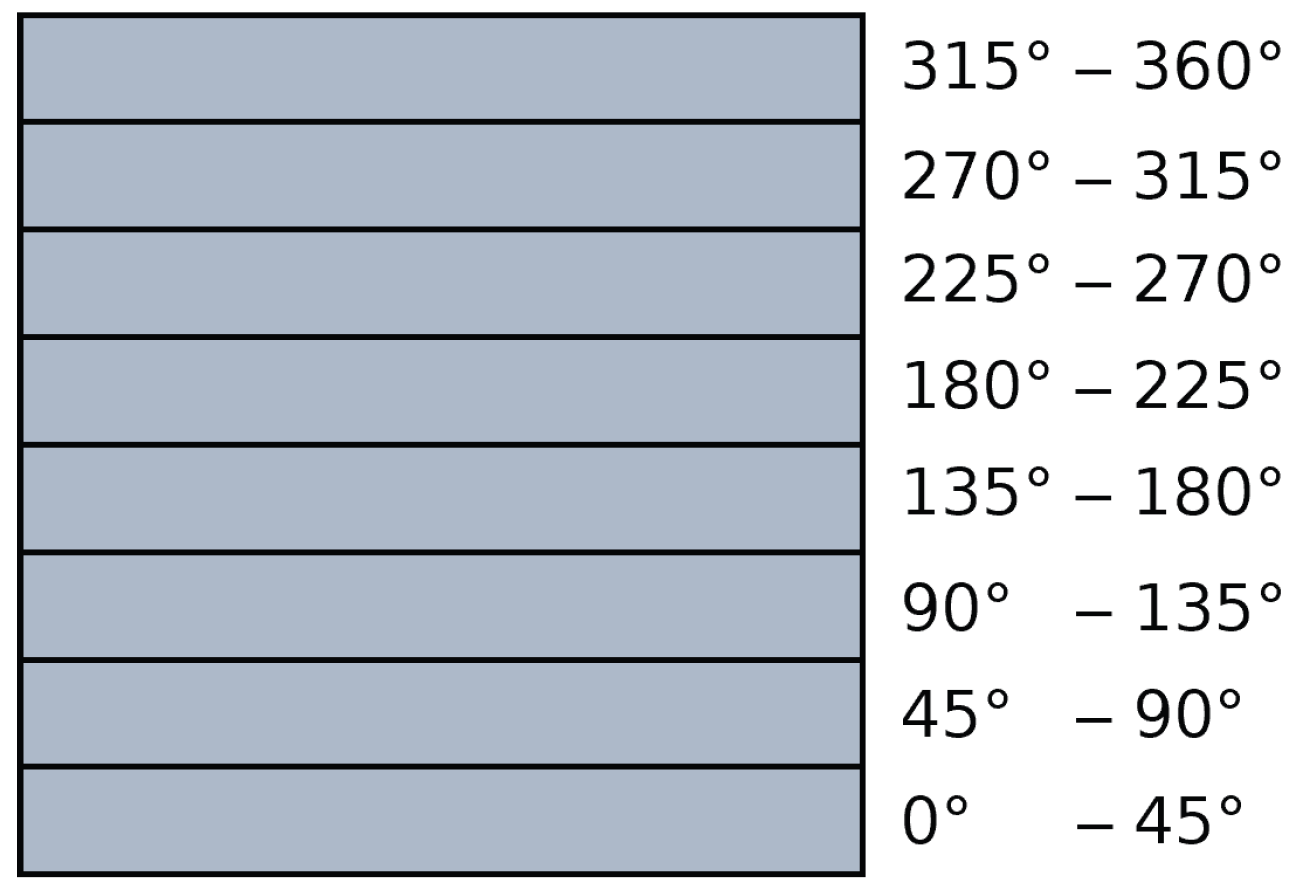
Within open airspace, an airspace structure similar to the that used within the first Metropolis project was designed, presented in
Figure 2. The aircraft are separated in function of the bearing of their track, thus achieving a high degree of velocity alignment. Each layer had a heading range of 45°, starting at 0° at the lowest altitude level. There are two sets of layers (i.e., the layer set presented in
Figure 2 represents one set, there are two vertically stacked sets), such that aircraft have access to more cruising altitude options.
For constrained airspace, a different approach was taken. As aircraft are limited to flying along the existing street network, their possible heading ranges are locally limited. Due to this, if the heading range method would be used, aircraft would be unevenly distributed on a local level. Another challenge within constrained airspace is handling intersections, as turning aircraft must slow down in order to not under- or overshoot, hindering other aircraft from cruising normally, and creating conflicts.
Therefore, a modified version of the urban airspace structure developed in [
19] was used. The authors introduced turning layers within the airspace such that aircraft that slow down to perform a turn first descend in such a layer while not affecting another aircraft. The airspace structure also staggers cruise layers at intersections in order to avoid conflicts and interactions between cruising aircraft coming from different streets. The structure was modified to include more cruise layers and fewer turning layers, as the Metropolis II project aimed to test very high traffic densities.
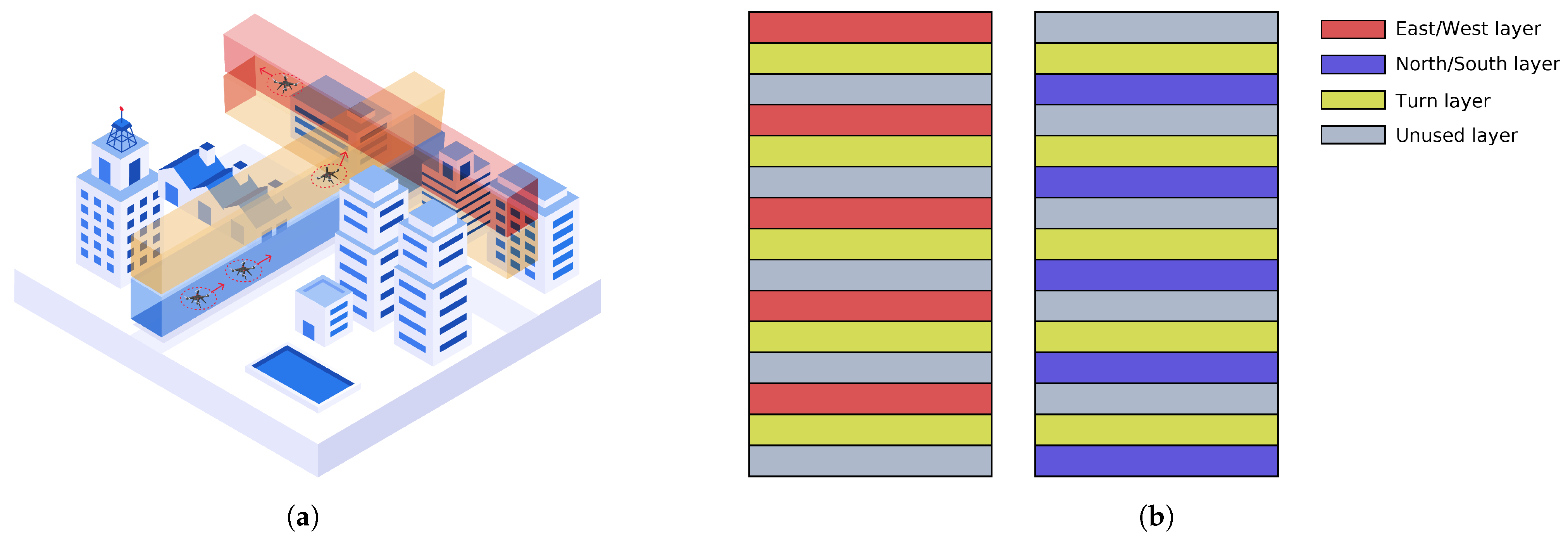
The resulting airspace structure is presented in
Figure 3. The categorisation of the streets into two groups (east/west and north/south) is further explained on in this work. In
Figure 3a, an isometric view of an intersection and one layer set is presented. The two cruising layers do not intersect, thus allowing aircraft that do not turn to continue cruising unhindered. The turn layer is at the same altitude on both streets, meaning that the turning aircraft does not turn directly into a cruise layer, but must find a way to merge safely.
Figure 3b shows a representation of the full-layer structure in function of the street category. In order to ensure that cruising aircraft have minimal interaction at intersection, certain altitudes are reserved for cruising within either street type. This results in the existence of unused layers within the structure.
2.4.2. Street Directionality
Previous research has shown that one-way streets are safer than two-way streets in an urban airspace environment [
20], as this eliminates the possibility of head-on encounters. This principle was incorporated in the design of the constrained airspace structure for the concept of operations presented in this paper.
Thus, the streets contained within the defined constrained airspace area in Vienna were categorised into two cruising groups. This was performed by extracting the street network graph of the city using OSMnx [
21]. The individual edges of the street network graph were grouped into larger street strokes using the COINS algorithm, which groups the edges of the graph in function of their continuity [
22]. These street strokes were then allocated within one of the two cruising groups through the use of a genetic algorithm optimisation method. The cost function was defined in function of intersections where the cruising layers of the same type intersect, with the scope of globally minimising such intersections. More information about the method can be found in [
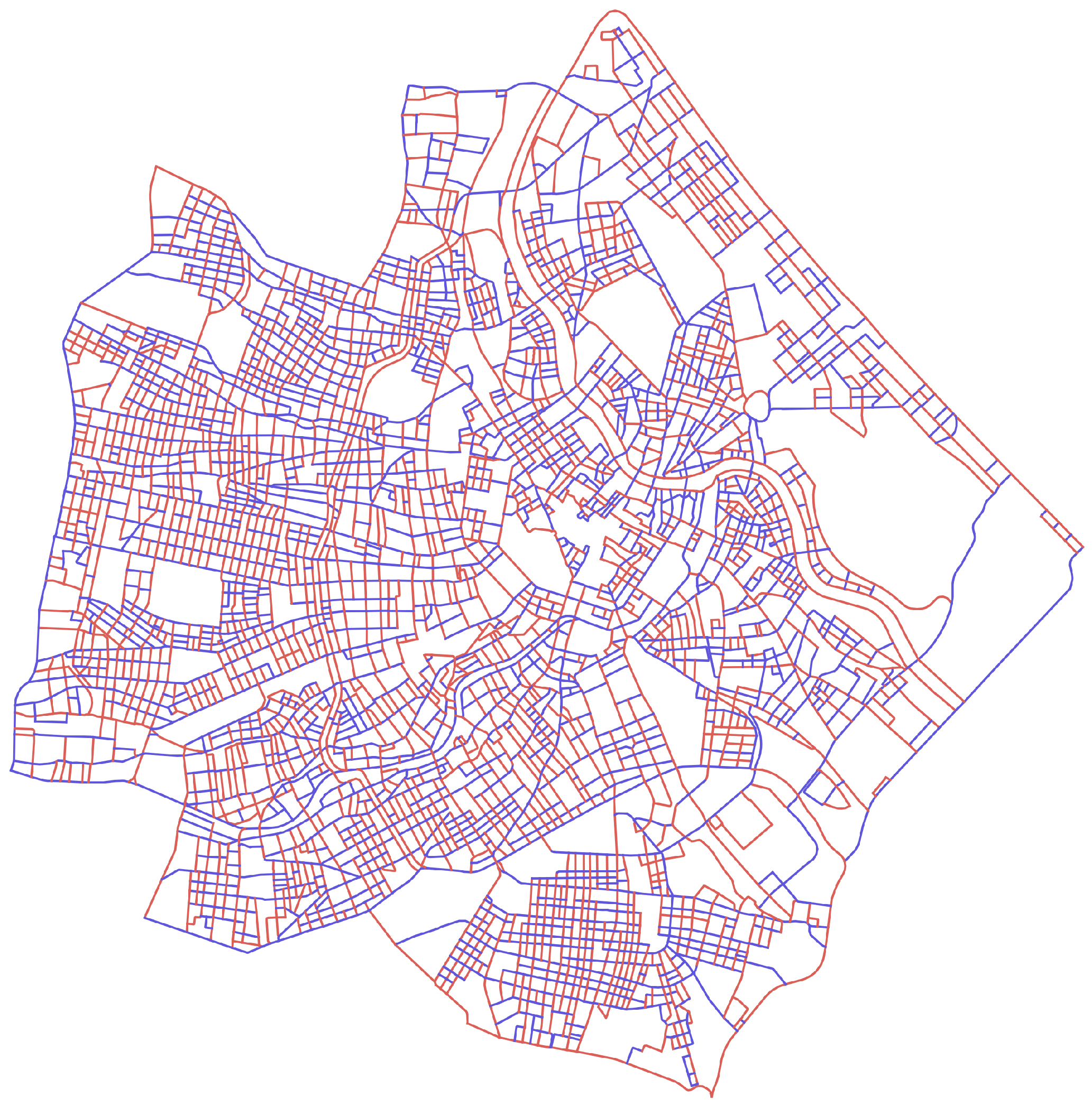
23]. The method yielded the directional graph presented in
Figure 4.
In this network, one group tends to be aligned in the north/south direction (blue), and the other in the east/west direction (red). These groups were further categorised using another genetic algorithm in order to designate the direction in which aircraft are allowed to move along them. In order to ensure that all destination nodes can be reached from any origin node, the graph had to be modified by eliminating a small number of edges and nodes.
2.5. Mission Planning and Capacity Balancing
Within a decentralised concept, the responsibility for flight planning and management lies with the individual agents and operators. Thus, each agent is required to plan their own flight path from the origin to the destination without knowledge of the flight paths of other agents in the system. However, comparable to how car traffic management tackles capacity balancing through the use of centralised systems (i.e., navigation mobile applications with congestion information, or lane management on motorways), the proposed air traffic management system includes a central entity responsible for supervising and managing traffic flow.
Thus, a path planning component for each individual aircraft is implemented. When the mission route is planned, live congestion information provided by the central entity is used to balance the travel distance with the predicted travel time. Aircraft can also replan their route while the mission is ongoing if the congestion information experiences changes.
The proposed path planning approach is a unified methodology for both open and constrained airspace. The entirety of the airspace is described as a directional graph such that, using the D* Lite algorithm [
24,
25], the shortest path connecting the origin and destination waypoints can be calculated. After D* Lite computes the optimal path, the path segments contained in open airspace are post-processed by a smoothing algorithm to minimise the unnecessary turns. The path planning algorithm is completely decentralised, and every aircraft generates its flight plan with no knowledge of current or future flight plans and thus includes no strategic deconfliction.
The centralised capacity balancing component is inspired by the work performed in [
26]. It gathers the current positions of all aircraft in the air at a constant frequency. The positions of the aircraft are used to compute the current local traffic densities, which are globally provided as congestion information. The capacity balancing component is not responsible for the replanning process, nor for modifying a flight plan. When aircraft receive the updated traffic data, they update their graph costs based on the traffic density and use the D* Lite algorithm to replan when appropriate.
2.6. Conflict Detection Method
An important component of the decentralised concept of operations presented in this work is the tactical conflict detection and resolution algorithm. It is a major contributor to safety, and is the main subject of the research at hand. Within the following section, detection and resolution algorithms developed as part of the Metropolis II project are presented. Later in this work, the possible improvements to these algorithms are described.
The first action that the CD&R system performs is conflict detection (CD). For this research, a state-based conflict detection algorithm was used, due to its robustness and flexibility [
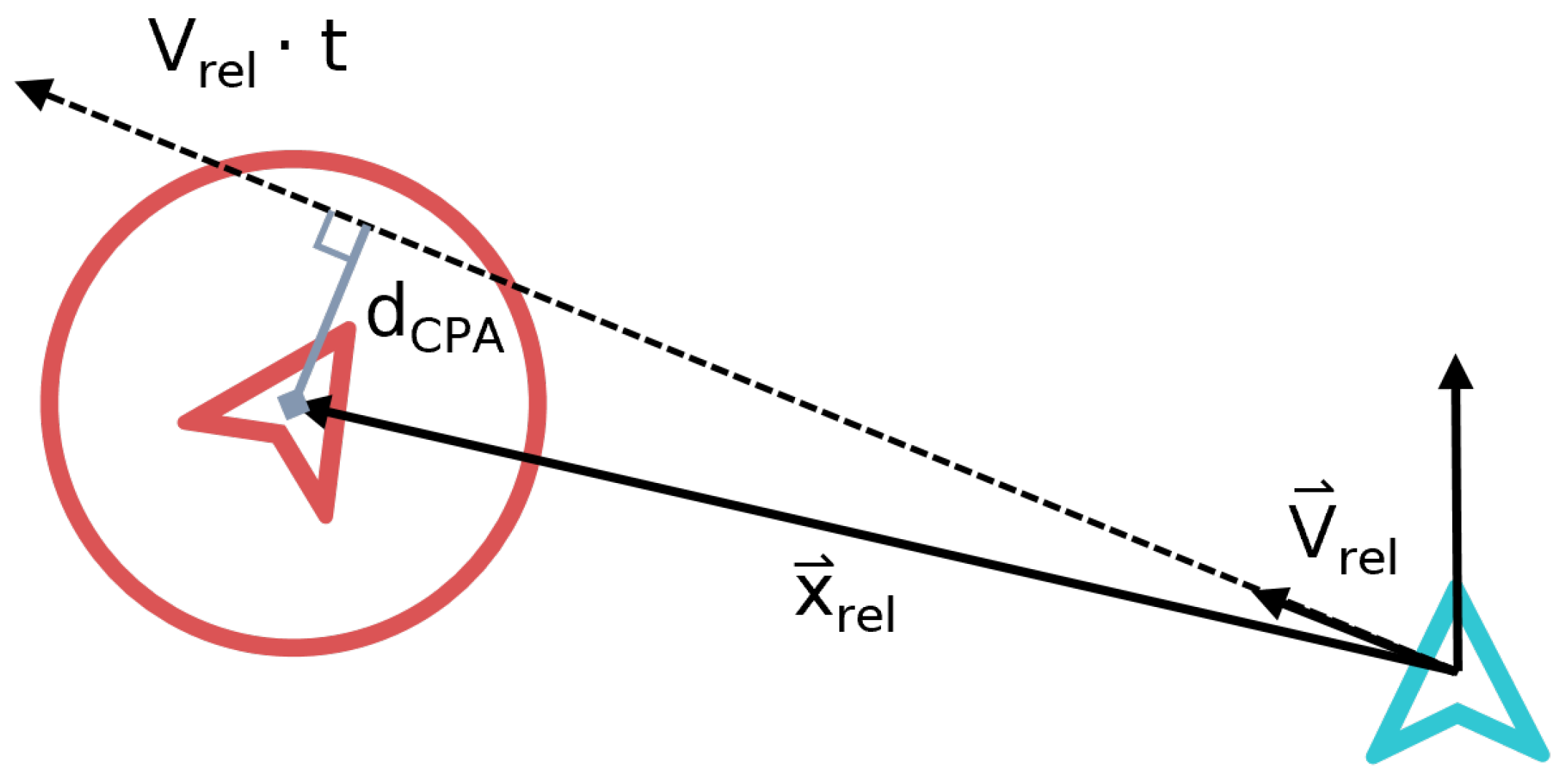
27]. Such algorithms linearly extrapolate the current state of aircraft within a certain look-ahead time, and determine the distance at the closest point of approach (CPA), as shown in
Figure 5. A conflict is detected when this distance is lower than the minimum allowed safe separation, and a conflict resolution (CR) algorithm has the role of increasing this distance beyond the minimum allowance within the look-ahead time. For the simulated traffic scenarios within this work, a look-ahead time of 10 s was used, in combination with a minimum separation distance of 32 metres horizontally and 25 feet vertically. These values are estimated from the signal-in-space performance requirements in Table 3.7.2.4-1 of [
28].
2.7. Conflict Resolution Algorithm
The automation of conflict resolution manoeuvres has been proposed within the air traffic management domain for an extended period of time [
29]. However, it has never gained full traction for conventional aviation. As predictions estimate that a large number of unmanned aircraft will operate in VLL airspace [
30], automated conflict resolution becomes a promising solution for handling high traffic densities.
Due to the topology of constrained urban airspace, the solution space for conflict resolution manoeuvres is limited in the horizontal dimension. As the aircraft must follow the street network, the only possible manoeuvres that do not risk collision with obstacles are altitude-based or velocity-based. Thus, due to the similarity of the conflict resolution problem, inspiration was drawn from the way in which conflicts are tackled for car traffic on motorways.
Similarly to how car traffic must cruise in the right-most lane if possible, aircraft within the decentralised concept must cruise within the lowest cruise layer, if possible. If a faster aircraft approaches from behind, a conflict will occur. In this case, regardless of the mission priority assigned to the slower aircraft, the manoeuvring responsibility would always lie with the aircraft that is behind, as this is predicted to result in a more stable situation than requiring lower-priority aircraft to move out of the way. Thus, the faster aircraft can initiate an overtake manoeuvre by ascending to a superior cruise level if possible, or otherwise adjust their velocity such that the conflict is solved.
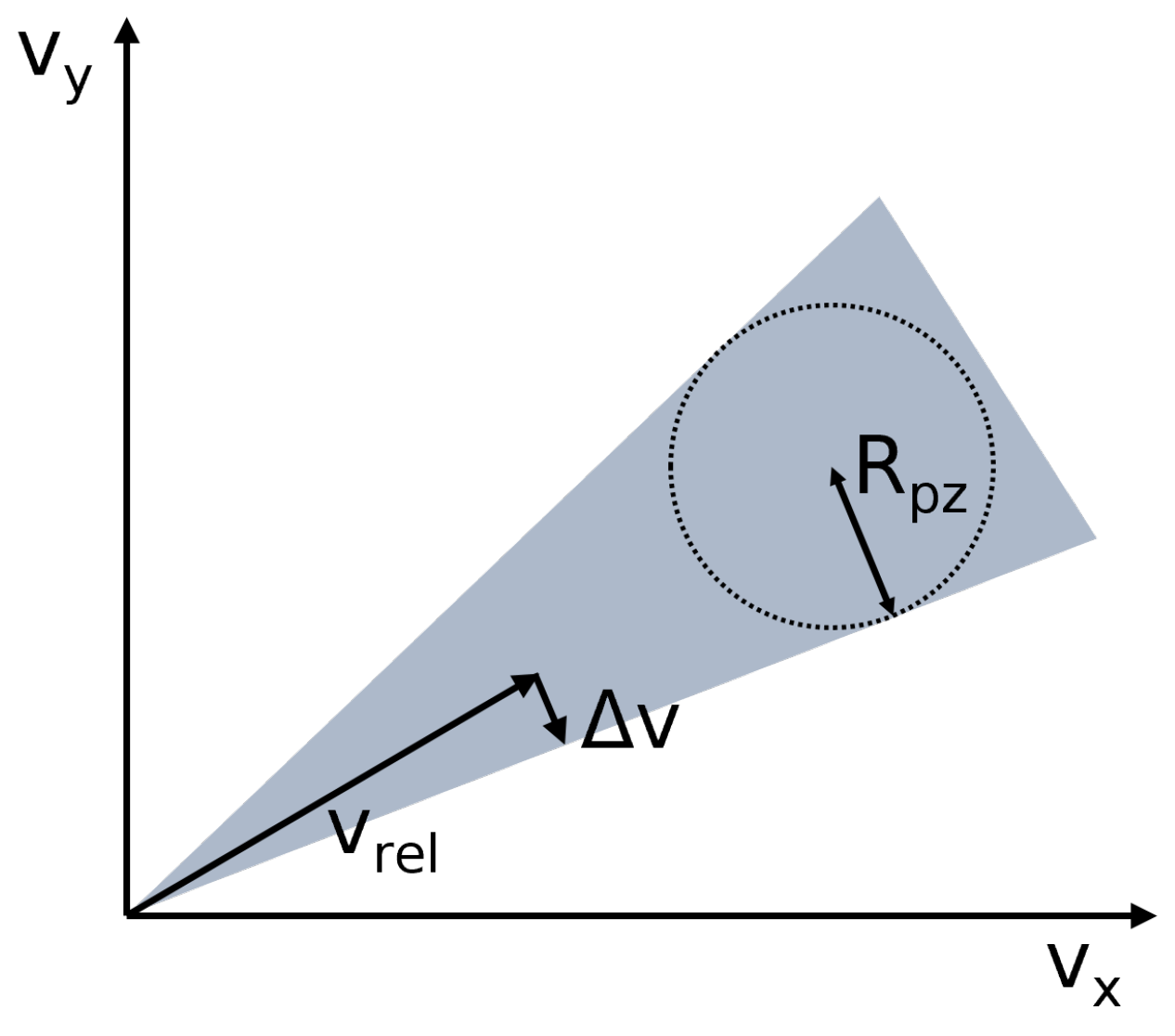
For lateral conflicts, a non-cooperative velocity obstacle method [
31] is used, as presented in
Figure 6. In such situations, the aircraft with the lower priority is responsible for performing the resolution manoeuvre. The required change in velocity (
) is achieved by only changing the absolute value of the velocity vector. Thus, the heading of the aircraft does not change, as it is restricted by the direction of the path it is following. Multi-aircraft conflicts are also resolved using this method by stacking multiple velocity obstacles. A summary of the resulting algorithm used for conflict resolution within the decentralised concept of the Metropolis II project is presented in Algorithm 1.
| Algorithm 1: Conflict resolution algorithm of the decentralised concept of operations |
| 1: | for each intruder of this ownship do | |
| 2: | if intruder is behind then: | ▹ ownship does not perform an action |
| 3: | return Continue cruising | |
| 4: | else if intruder is in front then: | |
| 5: | if ownship can ascend then: | ▹ ownship can ascend to next cruise layer |
| 6: | return Ascent command | ▹ ownship overtakes |
| 7: | else | ▹ ownship cannot overtake |
| 8: | return Speed-based CR command | |
| 9: | else if intruder is directly above or below then: | |
| 10: | set ownship and intruder vertical speed to 0 | ▹ stop vertical manoeuvring |
| 11: | if ownship has priority then: | ▹ ownship continues cruising |
| 12: | return Maintain altitude, continue cruising | |
| 13: | else | ▹ intruder has priority |
| 14: | return Slow down to let intruder merge | |
| 15: | else | ▹ intruder is coming from the side |
| 16: | if ownship has priority then: | ▹ ownship does not perform an action |
| 17: | return Continue cruising | |
| 18: | else | ▹ intruder has priority |
| 19: | return Speed-based CR command | |
2.8. Proposed Improvements for Conflict Prevention, Detection, and Resolution
The following section presents the potential improvements that were investigated as part of the research at hand, with the purpose of improving the tactical conflict resolution component of an urban airspace air traffic management system.
2.8.1. Use of Intent in Conflict Detection
The first proposed investigation concerns the conflict detection method. A major issue with the use of a state-based conflict detection algorithm in a constrained urban environment (as used in the baseline concept of operations) is the risk of incorrectly assessing the conflict situation [
13]. As presented in
Figure 7, scenarios can arise in which conflicts are detected that will in reality not occur based on the flight paths of aircraft (false-positive detection events, shown in
Figure 7a). There is also a risk of not detecting conflicts in a timely manner (false-negative detection events), as shown in
Figure 7b.
The proposed solution for this issue is the use of intent information. Agents would be responsible to communicate their intent within the look-ahead time, and take into account this information when deciding whether a conflict is occurring. Previous studies have explored the use of intent within conflict detection and resolution systems [
32,
33,
34] for open airspace or conventional aviation. However, the use of this information could produce a destabilising effect on the airspace, as any resolution manoeuvre also changes the intent of aircraft. In constrained airspace, the intent information remains constant, as aircraft cannot change their intended path or heading due to a conflict. Thus, this kind of conflict detection has the potential to be suitable for urban traffic situations.
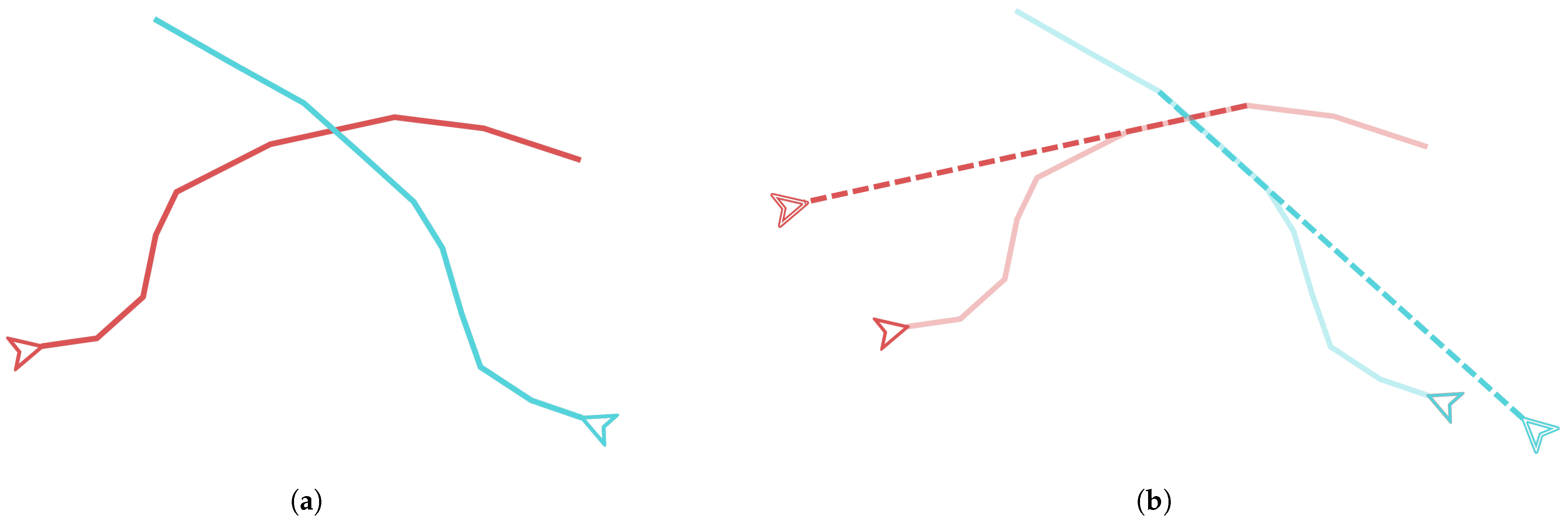
Thus, a detection algorithm that includes intent information while retaining the robustness of state-based methods was developed. In the initial stage of the algorithm, a fast geometry-based search is conducted based on the paths and intent information of the aircraft. Aircraft pairs with intersecting intent paths are further investigated to determine whether a conflict event is occurring. As presented in
Figure 8, the states of the aircraft are projected linearly from the intersection point in function of the route distance. A state-based conflict detection method is then applied, determining whether the aircraft will breach the minimum separation distance at the intersection point.
While the prediction is inaccurate when turns are present, it is expected that the iterative nature of the algorithm will account for these inaccuracies, incrementally adjusting the resolution manoeuvre until a solution is reached. However, the filtering of false-positive events should not be affected, as they are mostly characterised by a lack of intersecting paths. The resulting projection-based algorithm is presented in Algorithm 2.
| Algorithm 2: Projection-based conflict detection algorithm |
| 1: | for each aircraft close to this ownship do: |
| 2: | check intersections of own path with intent information |
| 3: | for each intersection do: |
| 4: | determine projected state of intruder |
| 5: | determine projected state of ownship |
| 6: | apply state-based conflict detection method |
| 7: | if conflict is detected then: |
| 8: | return Projected conflict geometry |
| 9: | else |
| 10: | return Not a conflict |
For open airspace, due to the lack of a predetermined network that needs to be followed, the use of intent information would produce the destabilising effects described in the literature. Thus, a state-based detection method continues to be applied in situations where both aircraft are in open airspace. Furthermore, the projection-based algorithm does not consider vertical intent. For such conflicts, a state-based method is also used for both open and constrained airspaces.
2.8.2. Enabling Heading Manoeuvres in Open Airspace
For the baseline decentralised concept of operations, we decided to limit conflict resolution manoeuvres in open airspace to velocity-only as well, similarly to constrained airspace. This was performed in order to avoid situations in which aircraft choose trajectories that would result in the breaches of restricted airspace, as well as the emergence of a high frequency of altitude changes due to the heading ranges presented in
Figure 2. However, this has the potential of unnecessarily restricting the solution space, especially when faster aircraft need to overtake slower aircraft.
Thus, the final proposed improvement investigated within the work at hand is the enabling of heading manoeuvres for conflict resolution in open airspace in order to investigate the benefits on overall airspace safety. A simple method, based on that described in
Figure 6, was implemented. The priority rules described in constrained airspace still apply (i.e., the aircraft in front has priority, mission priority levels). While this method may result in an increase in the number of restricted area breaches, the investigation at hand does not consider these events for the performance analysis, as the aim is to isolate the benefit of enabling heading-based overtake manoeuvres.
2.8.3. Vertical Conflict Prevention during Turn Manoeuvres
The final investigation concerns the conflict prevention component of a decentralised system. In the baseline system, aircraft are obligated to use a turn layer when decelerating to perform a manoeuvre at an intersection. The aircraft first checks whether it can use the turn layer below, then it checks whether it can use the one above. If none are available, it still attempts to use the turn layer below and perform a merge manoeuvre within this layer. This is performed in order to prevent horizontal conflicts that would result from the aircraft slowing down with the aircraft behind it in a turn layer.
The potential to improve this system stems from the observation that merge manoeuvres are the main source of intrusions in constrained urban airspace [
20]. Thus, the proposed change to the baseline concept of operations is to eliminate the obligation to merge and use the turn layer to decelerate, thus giving priority to preventing vertical conflicts as opposed to horizontal ones. Aircraft are required to check whether either the turn layer above or below is free to use, otherwise, they will just use the cruise layer to decelerate. While this has the potential to affect the cruising aircraft behind the turning aircraft, it is expected that the horizontal conflicts are easier to solve than the vertical merging conflicts.
It is important to note that this method implies that the aircraft will most probably end up in an unused layer when turning from a cruise layer onto another street, as evidenced by
Figure 3. Thus, the obligation to merge back into a cruise layer after the turn manoeuvre is maintained.
3. Experiments
The following section presents the experiments performed to determine the effect of the proposed improvements to conflict prevention, detection and resolution on safety and efficiency metrics when compared to the original methods.
3.1. Traffic Scenarios
The traffic scenarios were generated by considering the population density and local gross productivity values for the city of Vienna, assuming that these would correlate with the demand for urban air traffic services. Thus, origin and destination nodes were placed throughout the districts of the city, with their density depending on the aforementioned factors.
The service demand was then estimated as a function of the current parcel delivery demand in 20% increments from 20% to 100%. The scenarios were then generated for one hour of operation. The resulting number of aircraft that need to operate within an hour is presented in
Table 1. For each density, nine different repetitions were created.
Several simplifying assumptions were made in order to better control the variables of the experiment and focus on the cruising phase of the operations. Thus, the aircraft were simulated using a point-mass model, and elements such as parcel weight and energy consumption were not taken into account. Furthermore, the landing phase of the missions was eliminated, as it would create a disproportional number of vertical conflicts and intrusions during this process, affecting the cruising results. The take-off phase was kept, as it plays an essential role in the way aircraft spawn within the simulation (when the traffic density around the take-off point is low enough).
3.2. Simulation Environment
The traffic scenarios were simulated using the BlueSky Open Air Traffic Simulator [
35]. Previously described algorithms were implemented as plugins. Two types of aircraft were used, based on the model of the DJI Matrice 600 included in BlueSky, differing only in their cruise speed, as shown in
Table 2.
3.3. Independent Variables and Experiment Conditions
Three separate experiments were conducted to determine the effect of each proposed modification on the safety and efficiency metrics when compared to the baseline case. These were run under very similar conditions. All shared the same traffic scenarios, mission procedures, urban environment, and safety parameters (i.e., minimum separation, look-ahead time, etc.). The only difference between conditions are the proposed modifications to the tactical conflict prevention, detection, and resolution modules. Thus, each experiment had different independent variables.
Experiment 1: Conflict detection
The independent variable of the first experiment is the detection method used within constrained airspace. Four conflict detection algorithms were tested, as presented below:
State-based, representing the baseline condition also used within the Metropolis II project;
Projection-based, representing the direct implementation of the projection-based method, as described in
Section 2.8.1;
Projection-based filter, where an initial state-based detection iteration is performed, and the false-positive conflicts are filtered using the projection-based algorithm by only considering the conflicts that are detected by both methods;
Projection-based and state-based, where both methods are run in parallel, and all detected conflicts are pooled and send to the conflict resolution module.
Experiment 2: Conflict resolution
The conflict resolution experiment had two experimental conditions: the baseline condition, where heading-based conflict resolution manoeuvres are not allowed in open airspace, and the “heading” condition, where such manoeuvres are enabled.
Experiment 3: Conflict prevention
The final experiment was conducted to determine the effect of the modified turn logic on airspace safety and efficiency. Thus, the two experimental conditions consist in the baseline turn logic, used within the original Metropolis II concept, and the modified turn logic presented in this paper.
3.4. Dependent Measures
The metrics that were used to analyse whether the methods improved upon the baseline case are:
Number of conflicts, both in total and in constrained airspace;
Number of intrusions, both in total and in constrained airspace;
Earliest detection time of conflicts that resulted in an intrusion, i.e., the maximum time duration, limited at 60 s, between the detection of a conflict and the intrusion event between the two conflicting aircraft;
Distance travelled efficiency, computed as a percentage of the ideal route distance for each mission;
Mission duration efficiency, computed as a percentage of the ideal duration for each mission.
3.5. Hypotheses
Experiment 1: Conflict detection
The projection-based conflict detection method is hypothesised to increase airspace safety when compared to the baseline case, as conflicts that were not detected by only using a state-based method should be detected by including intent information. Furthermore, out of the three variations of the projection-based method, the one augmented with state-based detection will perform the best, as more conflicts will be detected and accounted for.
Experiment 2: Conflict resolution
Allowing aircraft to laterally overtake in open airspace is hypothesised to produce a small benefit to overall airspace safety, as faster aircraft will not be forced to slow down and wait behind slower aircraft, creating repeat conflicts and potential intrusion events.
Experiment 3: Conflict prevention
The initial strategy for turning was developed under the assumption that the use of turn layers would reduce conflicts and improve the intersection throughput. However, issues with this strategy were observed at high densities, when several aircraft would attempt to use turn layers at the same time. Thus, it is hypothesised that the modified turn logic will improve the airspace stability and reduce the number of intrusions, as aircraft will not attempt to merge into a turn layer if there are other aircraft within it. At the same time, the duration of missions is expected to increase, as cruising the aircraft will have to slow down for turning aircraft more often.
4. Results
The following section presents the results of the experiments performed to determine the effect of the proposed modifications to the tactical conflict prevention, detection, and resolution module of the decentralised concept of operations developed as part of the Metropolis II project. The results are divided into three subsections, one for each experiment.
4.1. Experiment 1: Effect of Intent Information on Conflict Resolution Performance
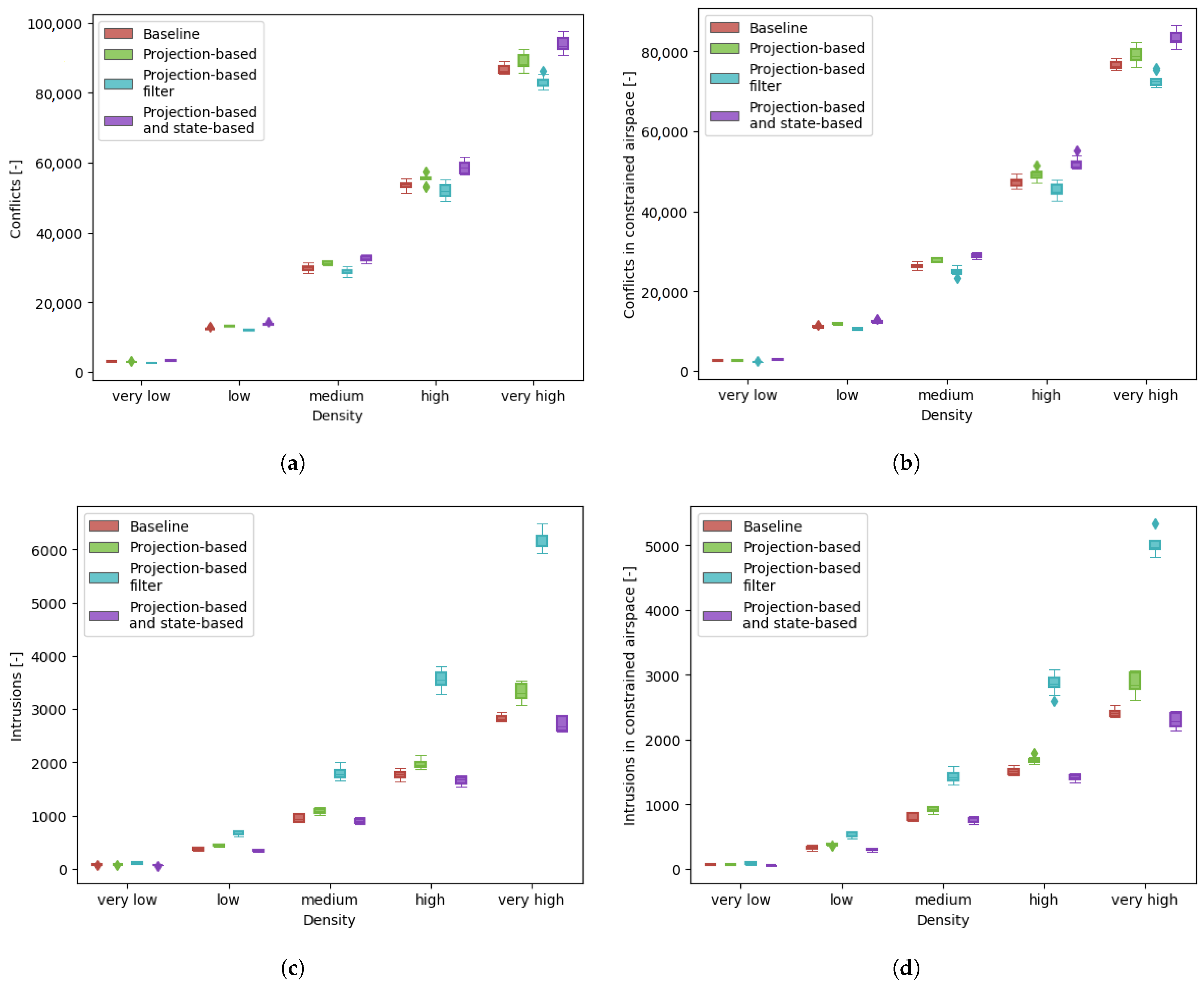
The first experiment to be discussed concerned the inclusion of intent information within the conflict detection process. The safety metrics of this experiment are presented in
Figure 9. Using intent information increased the number of conflicts that were detected, with the greatest increase observed in the case where both projection-based and state-based methods were used. As expected, filtering presumably false-positive conflicts also resulted in a lower number of detected conflicts.
In terms of the number of intrusions, the results were relatively unexpected. The projection-based method experienced a higher number of intrusions than the baseline method, especially at high densities. On the other hand, the best performing method was the combined one, with a slightly better intrusion performance when compared to the baseline. Finally, the worst performing method was the projection-based filter, which experienced a significantly higher number of intrusions than all other methods.
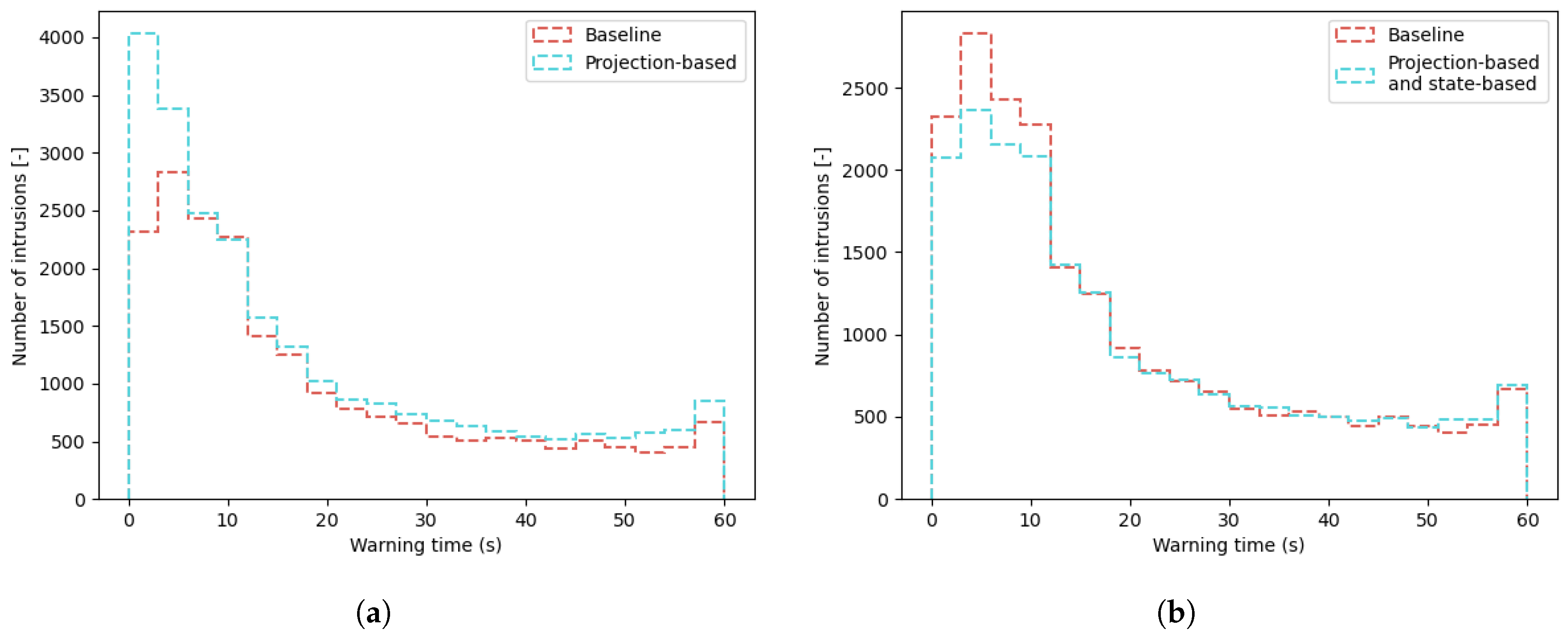
One of the reasons for the increased number of intrusions can be seen by analysing the first detection time for these events. In
Figure 10, the frequency distribution of the first warning time for a conflict within a maximum of one minute ahead of the intrusion is plotted as compared to the baseline case. In the projection-based case, there is a noticeable increase in detections that occur within 5 s of the intrusion event, meaning that the aircraft had less time to act and solve the conflict than in the baseline case. This means that many conflicts that resulted in an intrusion were initially discarded, but then only considered when an intrusion was inevitable (within 3 s).
However, adding intent information to the state-based method resulted in a distribution comparable to the baseline case, showing that more conflicts were detected in a timely matter. Thus, the peak of the projection-based method at low detection times was mitigated.
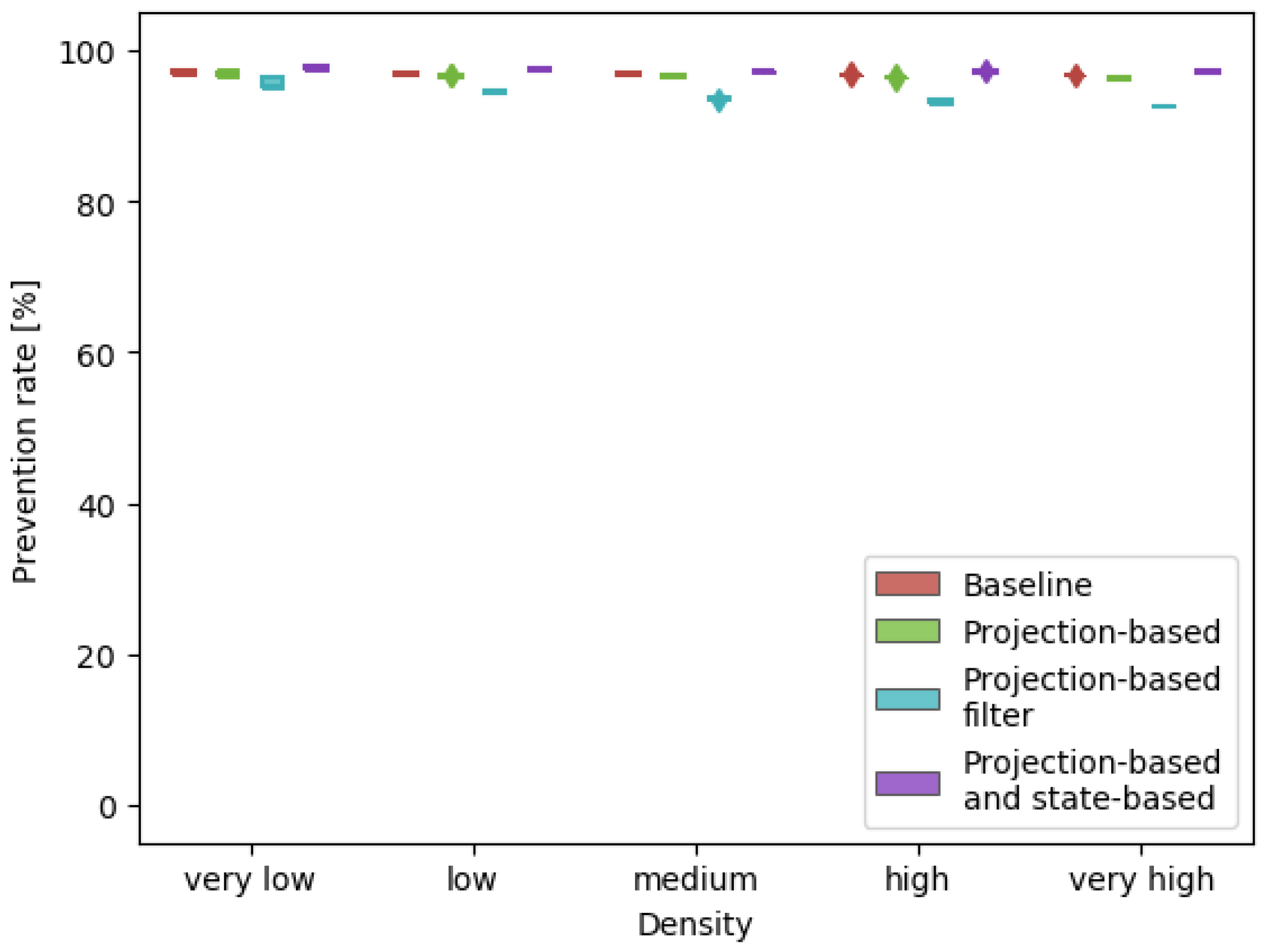
Another interesting result of the experiment can be seen when analysing the intrusion prevention rate for each conflict detection method, as presented in
Figure 11. The most notable difference comes in case of the projection-based filter method, which achieved the lowest conflict prevention rate. This can be explained by the fact that intrusion events will always be detected by the state-based detection method, but they only pass the filter when there is little time to act, thus decreasing the prevention rate. The other methods have a similar prevention rate, with the combined projection and state-based method being slightly better. This shows that not only did the method detect more conflicts, but the conflict resolution module was also able to use the extra information to better solve the conflicts.
Lastly, in terms of efficiency performance, as presented in
Figure 12, the conflict detection method did not have a significant effect on the distance or duration of the missions. The small differences can be attributed to the fact that solving more conflicts is associated with an overall slower cruising velocity, as the main solving strategy is speed reduction.
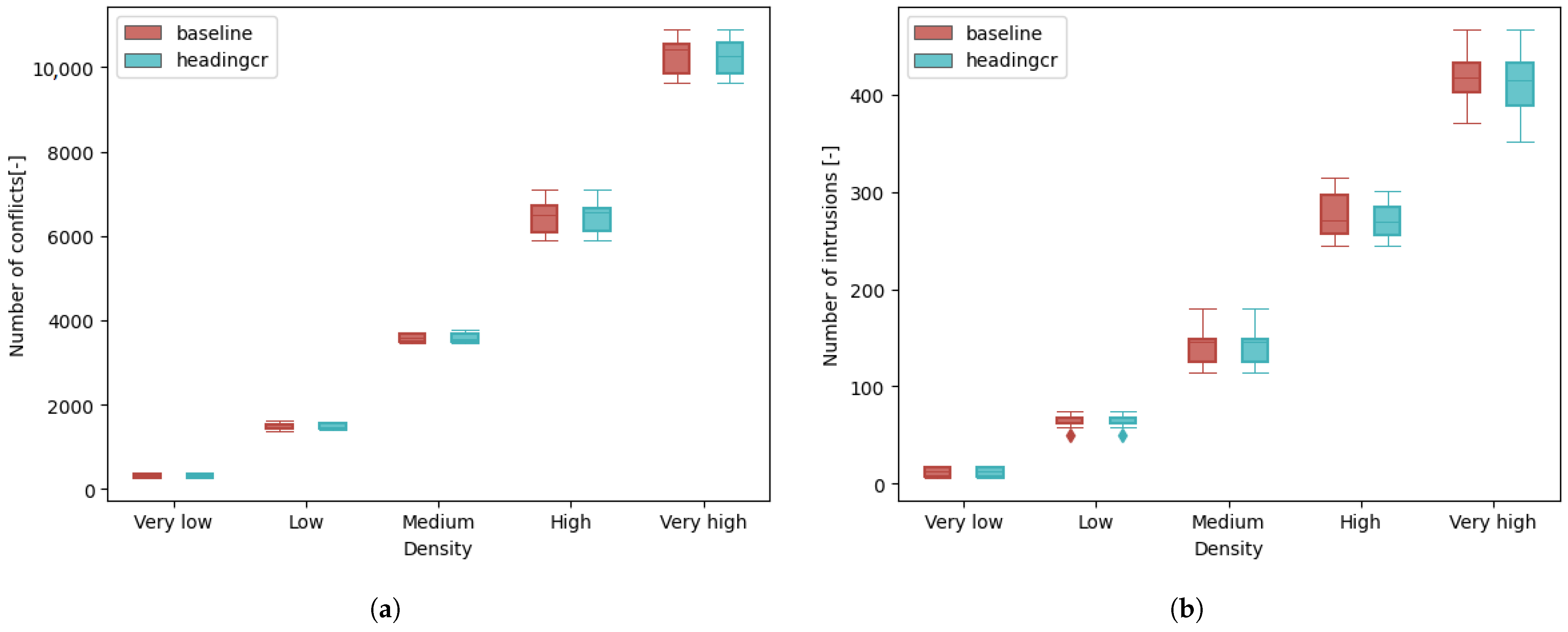
4.2. Experiment 2: The Use of Heading-Based Conflict Resolution in Open Airspace
The following section presents the results of the experiment in which the effect of introducing heading-based conflict resolution algorithms in open airspace is compared to the baseline case, which uses a speed-based algorithm. All results in this case show little to no improvement over the baseline case. This is most probably due to the already established airspace structure in open airspace, where aircraft are allocated a certain cruise altitude based on their heading. Due to this, encounters between aircraft usually happen with a small heading deviation and relative velocity, where a speed-based solution already performs well. Thus, in terms of the safety metrics presented in
Figure 13, the performance of the two methods are similar.
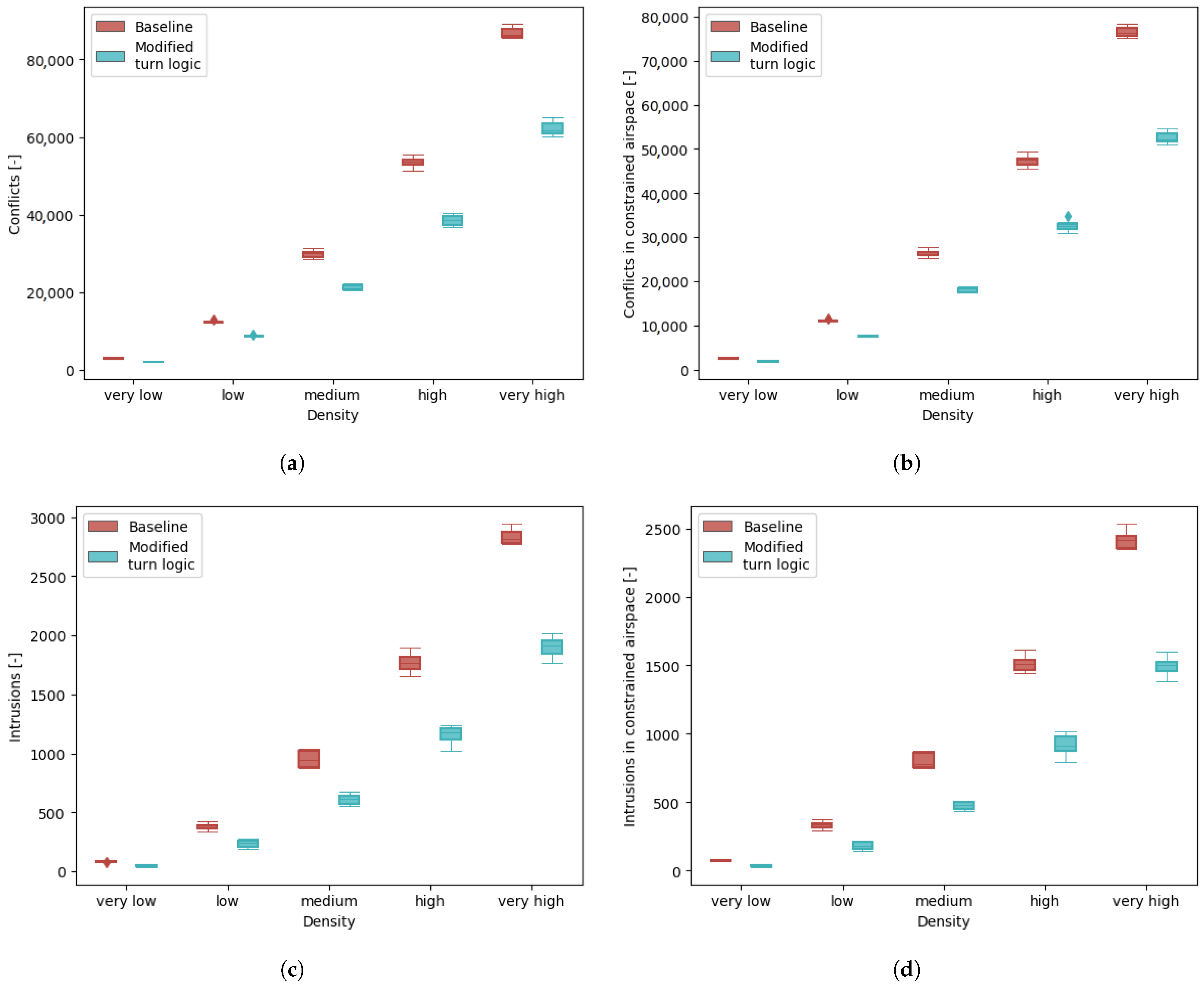
4.3. Experiment 3: Improving Turning Logic for Conflict Prevention
The third experiment aimed to determine the effect of the modified turn logic on airspace safety. The results of the safety metrics, presented in
Figure 14, show an unexpected improvement brought by the proposed modification, with a reduction of up to approximately 30% in conflicts and 40% in intrusions that occurred in constrained airspace. This shows that merging within an already populated turn layer was one of the major contributors to conflicts in the original Metropolis II decentralised concept, especially at high traffic densities.
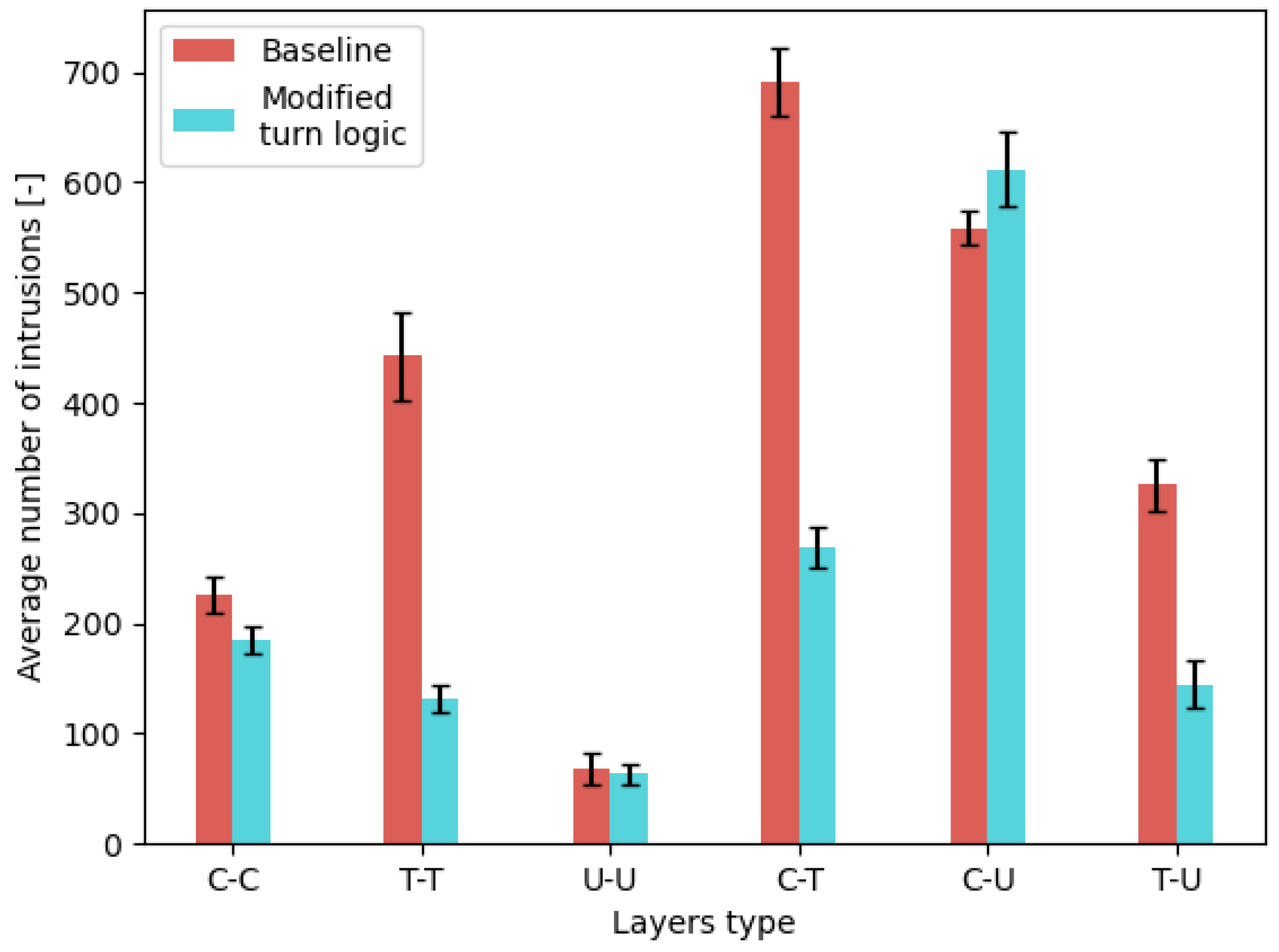
Thus, it is apparent that the conflicts generated by aircraft not using turn layers destabilise the airspace less than those generated by aircraft attempting to merge within a turn layer. This information can be seen in
Figure 15, which shows the distribution of intrusion events in function of the layers in which the two aircraft were found. In the baseline case, most intrusions occurred when both aircraft were inside a turn later (T-T), or were attempting to merge into a turn layer from a cruise layer (C-T).
By changing the turn logic, many of the turn layer-related intrusions were eliminated, while the number of intrusions between aircraft in cruise and unused layers (C-U) experienced a slight increase. This can be explained by the fact that, if an aircraft turns from within a cruise layer onto a street that has a different layer configuration, it will find itself within an unused layer (as seen from
Figure 3), and only then attempt to merge back into a cruise layer. Such merges seem to be more successful, as traffic within cruise layers is more predictable than in turn layers, and aircraft are less prone to initiating vertical manoeuvres.
Finally, a difference can be observed in the efficiency metrics presented in
Figure 16. The modified turn logic shortens the duration of flights, an effect that can be attributed to the presence of a lower number of conflicts, and thus, less time spent at lower, conflict resolution velocities.
5. Discussion
The experiments and results presented in the paper at hand show that improvements can still be made for the decentralised tactical component of a future hybrid concept of operations for U-space.
The inclusion of intent information within conflict detection proved to be beneficial to overall airspace safety and stability when the information is used in parallel with state-based linear extrapolation methods. The results show that the inclusion of more information about the aircraft in proximity is more beneficial than filtering out conflicts and thus excluding information. However, it should be noted that this implementation would require increased communication between agents, which would be compatible with a hybrid air traffic management system.
An interesting implication of the findings presented in this paper is that false-positive conflicts appear to have a stabilising effect on the airspace. Aircraft that solve these conflicts typically adopt a slower velocity in situations where the traffic density is high and other aircraft are present in the area. This then helps in preventing and solving real conflicts. This effect can be compared to the concept of “defensive driving”, as car drivers are encouraged to slow down even if the certainty of a conflict occurring is not high. This can have an effect on efficiency, as mission duration will increase. However, the results presented in this paper show that the difference is small.
It should be mentioned that the projection-based method developed for this research does not account for inaccuracies resulting from aircraft slowing down for turns. Instead, the algorithm relied on subsequent iterations in order to adjust for these situations. However, a downside of this was that a binary decision (conflict or not) was taken based on the intent information, leading to some conflicts only being detected very late when the accuracy of the intent information was higher. Thus, the algorithm can be improved by accounting for these inaccuracies and uncertainties, possibly by implementing greater safety margins, or using probabilistic-based predictions and decision making.
The method could also potentially be improved by considering vertical intent, especially as altitude changes are another important source of unpredictability. Aircraft could consider the intention of other traffic when a vertical manoeuvre is desired.
The hypothesis regarding the effect of including intent information in the conflict detection process is partly rejected, as the projection-based method did not outperform the state-based method. However, in line with expectations, using both methods in parallel did increase airspace safety.
The results of the second experiment show that using a speed-based conflict resolution method in layered open airspace achieves similar results to a heading-based method. This can be explained by the fact that traffic had a high degree of alignment due to similar routing patterns and the narrow heading-ranges of layers. However, this result is highly specific to the chosen layer structure and routing method. In the research at hand, while traffic was heterogeneous, it still had a high degree of homogeneity. Heading-based conflict resolution might still be the preferred option if vehicles with greater differences are flying within the same airspace layers, and the faster aircraft will have to overtake the slower ones.
Thus, the previously stated hypothesis on the effect of using heading-based manoeuvres in open airspace is rejected. It was expected that the ability to overtake slower aircraft would reduce the number of conflicts and intrusions. However, in the traffic scenarios created and simulated as part of the research, the traffic speed heterogeneity and density were not great enough to observe this effect.
The last experiment produced results with unexpected magnitudes in the observed differences between cases. Both the number of conflicts and intrusions were greatly reduced by using the modified turning strategy, showing that slowing down traffic in cruise layers is a more stable turning strategy than forcing the use of a turn layer in high density cases. This can be explained by the fact that vertical conflicts are more complex than horizontal conflicts, and the speed-based conflict resolution algorithm was more suitable for the latter. Furthermore, traffic in cruise layers is more predictable, as vertical manoeuvres are less likely to be initiated, whereas aircraft in turn layers are forced to perform two vertical manoeuvres during a turn when using the baseline turning strategy.
The analysis of the distribution of intrusions in function of the layer types they occurred in reveals that a major source of conflicts are transitions that involve turn layers. With the modified turning strategy, many of these intrusion events do not occur, with only a small number of them being transferred to the cruise-unused layer category. Thus, even though the obligation to merge into a cruise layer after turning is maintained, this manoeuvre is better handled by the conflict detection and resolution module than the merge within a turn layer. This could be explained by the fact that, if two aircraft decide to merge within the same turn layer, a conflict in which both aircraft have a vertical velocity emerges, which is more difficult to solve than a situation in which only one aircraft is performing such a manoeuvre.
Furthermore, the conflict resolution algorithm presented in Algorithm 1 commands aircraft to stop ascending or descending while the manoeuvre is being performed. When merging within a turn layer, such a command might stop the aircraft at an altitude at which it conflicts with both cruising aircraft and aircraft in the turn layer, thus increasing the conflict and intrusion probability in an already unstable part of the airspace (areas before intersections). Thus, the increased predictability of simply slowing down within the cruise layer and not performing vertical manoeuvres is beneficial to stability and safety.
Therefore, the hypothesis regarding the proposed modification to the conflict prevention module is partly accepted, as it did increase the safety of the airspace. A surprising result, that goes against the hypothesis, is that the average mission duration efficiency was positively impacted. The magnitude in the difference in the number of conflicts and intrusions means that aircraft were solving less conflicts overall, spending more time at cruise speed than at slower, resolution speeds.
Overall, the improvements brought to the decentralised concept of operations developed within the Metropolis II research project showed both that the original concept was relatively robust, but also that more research is needed to improve the tactical components of future hybrid air traffic control systems for U-space. The partial decentralisation of operations can offer great benefit in terms of safety and efficiency for urban operations, and the complex emerging behaviours that are produced as a result of high traffic densities need to be further studied and understood.
6. Conclusions
This paper aimed to investigate the improvements to the tactical conflict prevention, detection, and resolution module of the decentralised concept of operations for U-space developed as part of the Metropolis II research project. For this, urban air traffic scenarios, amounting to over one million missions, were simulated within constrained airspace designed for the city centre of Vienna. The proposed improvements consist of modifications brought to each major component of the tactical separation system: improved conflict detection in constrained airspace through the use of intent, more flexible conflict resolution algorithm through the use of heading-based manoeuvres in open airspace, and an alternative conflict prevention strategy in turning manoeuvre situations.
Several conclusions can be drawn from the results of the different experiments performed for this work. Firstly, while the use of intent improves conflict detection and resolution performance in constrained airspace, it only does so when used in combination with the established state-based detection methods. This effect shows that false-positive detection events might have a stabilising effect on the airspace, equivalent to the concept of preventive car driving.
Next, the effectiveness of the conflict resolution algorithm is closely related to the airspace structure and rules. For example, enabling the use of heading-based conflict resolution in an already aligned open airspace did not yield improvements in safety when compared to using one-dimensional speed-based manoeuvres. However, this result might be different if traffic heterogeneity would be higher than in the scenarios developed for this research.
The last set of results show that major improvements can still be achieved in the field of tactical conflict prevention. The proposed modification greatly increased safety within the constrained airspace, as aircraft were only allowed to use turn layers if the chances of another aircraft intending to do the same were small. Thus, most aircraft performed turns directly within cruise layers, creating simpler conflict situations at intersections, and increasing airspace stability. Performing less vertical manoeuvres would also have the benefit of improved energy efficiency, as such manoeuvres have a high energy consumption.
The results of the Metropolis II project show that, in terms of the degree of centralisation, a combination of decentralised and centralised components is a good way to manage air traffic in urban airspace. The proposed improvements presented in this paper contribute to a better understanding of the traffic behaviour and dynamics produced by the tactical component of air traffic management systems, which serves towards the development of a future hybrid concept of operations that will safely and efficiently route aircraft in constrained urban airspace.
Further research should therefore focus on developing tactical CPD&R strategies in order to be better suited for handling high traffic densities in constrained urban environments. Tactical conflict prevention algorithms are shown to have the potential to greatly increase airspace safety, and better strategies to achieve this should be investigated (e.g., using machine learning methods). CD methods should be further researched and developed to better make use of the extra information that constrained airspace provides as opposed to open airspace. CR algorithms also need to be adapted and integrated with the other components of a hybrid air traffic management concept of operations (i.e., central strategic planning authority, airspace structure and rules, etc.) in order to achieve system harmonisation and cooperation. Furthermore, if intent information will be an integral part of tactical conflict resolution, communication methods and security considerations need to be a part of the investigation.
Lastly, more work is needed for studying the feasibility of urban airspace operations. Factors such as energy consumption and on-board processing power are key hardware-related elements that need to be considered. Furthermore, the take-off and landing phases of missions are critical operations during which a lot of conflicts can occur, and thus require procedures to be developed in order to ensure the operational safety.
Author Contributions
Conceptualisation, C.A.B.; methodology, C.A.B., A.M.V., N.P. and I.D.; software, C.A.B., A.M.V., N.P., I.D., J.E. and J.H.; formal analysis, C.A.B.; investigation, C.A.B.; data curation, C.A.B., A.M.V. and N.P.; writing—original draft preparation, C.A.B.; writing—review and editing, C.A.B., A.M.V., N.P., I.D., J.E., V.L., V.K. and J.H.; visualisation, C.A.B., A.M.V. and N.P.; supervision, J.E., V.L., V.K. and J.H.; project administration, J.E., V.L., V.K. and J.H.; funding acquisition, J.E., V.L., V.K. and J.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research has received funding from the SESAR Joint Undertaking under the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 892928 (Metropolis II).
Data Availability Statement
Conflicts of Interest
The authors declare no conflict of interest.
References
- Stolaroff, J.K.; Samaras, C.; O’Neill, E.R.; Lubers, A.; Mitchell, A.S.; Ceperley, D. Energy use and life cycle greenhouse gas emissions of drones for commercial package delivery. Nat. Commun. 2018, 9, 409. [Google Scholar] [CrossRef] [PubMed]
- Torens, C.; Volkert, A.; Becker, D.; Gerbeth, D.; Schalk, L.; Crespillo, O.G.; Zhu, C.; Stelkens-Kobsch, T.; Gehrke, T.; Metz, I.C.; et al. HorizonUAM: Safety and Security Considerations for Urban Air Mobility. In Proceedings of the AIAA AVIATION 2021 FORUM, Virtual, 2–6 August 2021. [Google Scholar] [CrossRef]
- Flammini, F.; Naddei, R.; Pragliola, C.; Smarra, G. Towards Automated Drone Surveillance in Railways: State-of-the-Art and Future Directions. In Advanced Concepts for Intelligent Vision Systems, Proceedings of the 17th International Conference, ACIVS 2016, Lecce, Italy, 24–27 October 2016; Blanc-Talon, J., Distante, C., Philips, W., Popescu, D., Scheunders, P., Eds.; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Cho, J.; Yoon, Y. Extraction and interpretation of geometrical and topological properties of urban airspace for UAS operations. In Proceedings of the ATM Seminar, Vienna, Austria, 17–21 June 2019. [Google Scholar]
- Straubinger, A.; Rothfeld, R.; Shamiyeh, M.; Büchter, K.D.; Kaiser, J.; Plötner, K.O. An overview of current research and developments in urban air mobility—Setting the scene for UAM introduction. J. Air Transp. Manag. 2020, 87, 101852. [Google Scholar] [CrossRef]
- Barrado, C.; Boyero, M.; Brucculeri, L.; Ferrara, G.; Hately, A.; Hullah, P.; Martin-Marrero, D.; Pastor, E.; Rushton, A.P.; Volkert, A. U-Space Concept of Operations: A Key Enabler for Opening Airspace to Emerging Low-Altitude Operations. Aerospace 2020, 7, 24. [Google Scholar] [CrossRef]
- Alarcon, V.; Garcia, M.; Alarcon, F.; Viguria, A.; Martinez, A.; Janisch, D.; Acevedo, J.J.; Maza, I.; Ollero, A. Procedures for the Integration of Drones into the Airspace Based on U-Space Services. Aerospace 2020, 7, 128. [Google Scholar] [CrossRef]
- McCarthy, T.; Pforte, L.; Burke, R. Fundamental Elements of an Urban UTM. Aerospace 2020, 7, 85. [Google Scholar] [CrossRef]
- CORUS Consortium. U-Space Concept of Operations; Edition 03.00.02; SESAR Joint Undertaking: Brussels, Belgium, 2019; Volume 2. [Google Scholar]
- Single European Sky ATM Research 3 Joint Undertaking. U-Space: Blueprint; Publications Office: Brussels, Belgium, 2017. [Google Scholar] [CrossRef]
- Bereziat, D.; Cafieri, S.; Vidosavljevic, A. Metropolis II: Centralised and strategical separation management of UAS in urban environment. In Proceedings of the 12th SESAR Innovation Days, Budapest, Hungary, 5–8 December 2022. [Google Scholar]
- Grocholsky, B.P.; Durrant-Whyte, H.F.; Gibbens, P.W. Information-theoretic approach to decentralized control of multiple autonomous flight vehicles. In Sensor Fusion and Decentralized Control in Robotic Systems III; McKee, G.T., Schenker, P.S., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2000; Volume 4196, pp. 348–359. [Google Scholar] [CrossRef]
- Morfin Veytia, A.; Badea, C.A.; Ellerbroek, J.; Hoekstra, J.; Patrinopoulou, N.; Daramouskas, I.; Lappas, V.; Kostopoulos, V.; Menendez, P.; Alonso, P.; et al. Metropolis II: Benefits of Centralised Separation Management in High-Density Urban Airspace. In Proceedings of the 12th SESAR Innovation Days, Budapest, Hungary, 5–8 December 2022. [Google Scholar]
- Patrinopoulou, N.; Daramouskas, I.; Lappas, V.; Kostopoulos, V.; Morfin Veytia, A.; Badea, C.A.; Ellerbroek, J.; Hoekstra, J.; de Vries, V.; van Ham, J.; et al. Metropolis II: Investigating the Future Shape of Air Traffic Control in Highly Dense Urban Airspace. In Proceedings of the 2022 30th Mediterranean Conference on Control and Automation (MED), Vouliagmeni-Athens, Greece, 28 June–1 July 2022. [Google Scholar] [CrossRef]
- Metropolis 2 Consortium. Simulation Dataset and Output Data for Research Project Metropolis 2; 4TU Research Data: Delft, The Netherlands, 2022. [Google Scholar] [CrossRef]
- Bharadwaj, S.; Carr, S.; Neogi, N.; Topcu, U. Decentralized Control Synthesis for Air Traffic Management in Urban Air Mobility. IEEE Trans. Control Netw. Syst. 2021, 8, 598–608. [Google Scholar] [CrossRef]
- Baukörpermodell (LOD0.4) Wien. Available online: https://www.wien.gv.at/stadtentwicklung/stadtvermessung/geodaten/bkm/daten.html (accessed on 20 May 2021).
- Sunil, E.; Hoekstra, J.; Ellerbroek, J.; Bussink, F.; Nieuwenhuisen, D.; Vidosavljevic, A.; Kern, S. Metropolis: Relating Airspace Structure and Capacity for Extreme Traffic Densities. In Proceedings of the ATM seminar 2015, 11th USA/EUROPE Air Traffic Management R&D Seminar, Lisbon, Portugal, 23–26 June 2015. [Google Scholar]
- Doole, M.; Ellerbroek, J.; Hoekstra, J.M. Investigation of Merge Assist Policies to Improve Safety of Drone Traffic in a Constrained Urban Airspace. Aerospace 2022, 9, 120. [Google Scholar] [CrossRef]
- Doole, M.; Ellerbroek, J.; Knoop, V.L.; Hoekstra, J. Constrained Urban Airspace Design for Large-Scale Drone-Based Delivery Traffic. Aerospace 2021, 8, 38. [Google Scholar] [CrossRef]
- Boeing, G. OSMnx: New methods for acquiring, constructing, analyzing, and visualizing complex street networks. Comput. Environ. Urban Syst. 2017, 65, 126–139. [Google Scholar] [CrossRef]
- Tripathy, P.; Rao, P.; Balakrishnan, K.; Malladi, T. An open-source tool to extract natural continuity and hierarchy of urban street networks. Environ. Plan. B Urban Anal. City Sci. 2021, 48, 2188–2205. [Google Scholar] [CrossRef]
- Badea, C.; Morfin Veytia, A.; Ribeiro, M.; Doole, M.; Ellerbroek, J.; Hoekstra, J. Limitations of Conflict Prevention and Resolution in Constrained Very Low-Level Urban Airspace. In Proceedings of the 11th SESAR Innovation Days, Virtual, 1–9 December 2021. [Google Scholar]
- Koenig, S.; Likhachev, M. D*lite. In Proceedings of the Eighteenth National Conference on Artificial Intelligence. American Association for Artificial Intelligence, Edmonton, AB, Canada, 28 July–1 August 2002. [Google Scholar]
- Koenig, S.; Likhachev, M. Improved fast replanning for robot navigation in unknown terrain. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 1. [Google Scholar] [CrossRef]
- Chung, J.J.; Miklić, D.; Sabattini, L.; Tumer, K.; Siegwart, R. The Impact of Agent Definitions and Interactions on Multiagent Learning for Coordination. In Proceedings of the AAMAS ’19: 18th International Conference on Autonomous Agents and MultiAgent Systems, Montreal, QC, Canada, 13–17 May 2019. [Google Scholar]
- Hoekstra, J.M.; Ellerbroek, J. Aerial Robotics: State-based Conflict Detection and Resolution (Detect and Avoid) in High Traffic Densities and Complexities. Curr. Robot. Rep. 2021, 2, 297–307. [Google Scholar] [CrossRef]
- International Civil Aviation Organisation. Annex 10—Aeronautical Telecommunications—Volume I—Radio Navigational Aids, 7th ed.; ICAO: Montreal, QC, Canada, 2018. [Google Scholar]
- Kuchar, J.; Yang, L. A review of conflict detection and resolution modeling methods. IEEE Trans. Intell. Transp. Syst. 2000, 1, 179–189. [Google Scholar] [CrossRef]
- Narkus-Kramer, M.P. Future Demand and Benefits for Small Unmanned Aerial Systems (UAS) Package Delivery. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- Fiorini, P.; Shiller, Z. Motion Planning in Dynamic Environments Using Velocity Obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Ribeiro, M.; Ellerbroek, J.; Hoekstra, J. The Effect of Intent on Conflict Detection and Resolution at High Traffic Densities. In Proceedings of the International Conference on Research in Air Transportation (ICRAT), Tampa, FL, USA, 23–26 June 2020. [Google Scholar]
- Yang, L.; Kuchar, J. Using intent information in probabilistic conflict analysis. In Proceedings of the Guidance, Navigation, and Control Conference and Exhibit, Boston, MA, USA, 10–12 August 1998. [Google Scholar] [CrossRef]
- Porretta, M.; Schuster, W.; Majumdar, A.; Ochieng, W. Strategic Conflict Detection and Resolution Using Aircraft Intent Information. J. Navig. 2010, 63, 61–88. [Google Scholar] [CrossRef]
- Hoekstra, J.; Ellerbroek, J. BlueSky ATC Simulator Project: An Open Data and Open Source Approach. In Proceedings of the International Conference for Research on Air Transportation, Philadelphia, PA, USA, 20–24 June 2016. [Google Scholar]
Figure 1.
The urban environment used to develop the air traffic management concepts of operation within the Metropolis II project. The central area is constrained airspace, whilst the outer area is open airspace with restricted air volumes in red.
Figure 1.
The urban environment used to develop the air traffic management concepts of operation within the Metropolis II project. The central area is constrained airspace, whilst the outer area is open airspace with restricted air volumes in red.
Figure 2.
Layer configuration in open airspace.
Figure 2.
Layer configuration in open airspace.
Figure 3.
The layer configurations used within constrained airspace. (a) Isometric view of layers at intersections, configured such that cruising aircraft do not interfere with each other, and turn layers are always at the same altitude; (b) Layer configuration in function of street categorisation. Certain altitudes are reserved for cruising either in the east/west or north/south directions. Each layer is 30 in height.
Figure 3.
The layer configurations used within constrained airspace. (a) Isometric view of layers at intersections, configured such that cruising aircraft do not interfere with each other, and turn layers are always at the same altitude; (b) Layer configuration in function of street categorisation. Certain altitudes are reserved for cruising either in the east/west or north/south directions. Each layer is 30 in height.
Figure 4.
The resulting categorisation of streets within constrained airspace into mostly north/south (blue) and mostly east/west (red) directions by the genetic algorithm optimisation method.
Figure 4.
The resulting categorisation of streets within constrained airspace into mostly north/south (blue) and mostly east/west (red) directions by the genetic algorithm optimisation method.
Figure 5.
Functioning principle of state-based conflict detection. The relative speed () and relative position () from the ownship (blue) to the intruder (red) are used to determine the distance at the closest point of approach (), and check whether this distance is smaller than the minimum allowance within the look-ahead time (t).
Figure 5.
Functioning principle of state-based conflict detection. The relative speed () and relative position () from the ownship (blue) to the intruder (red) are used to determine the distance at the closest point of approach (), and check whether this distance is smaller than the minimum allowance within the look-ahead time (t).
Figure 6.
Velocity obstacle methods calculate the required change () in relative speed between two aircraft () in order for the minimum separation distance (defined by the radius of the protection zone ) to not be breached.
Figure 6.
Velocity obstacle methods calculate the required change () in relative speed between two aircraft () in order for the minimum separation distance (defined by the radius of the protection zone ) to not be breached.
Figure 7.
Situations in which a state-based conflict detection method is considered unsuitable: (a) False-positive conflict, blue aircraft detects a conflict based on a linear extrapolation of the current state of the red aircraft; (b) False-negative conflict, blue aircraft has no knowledge of the future turn of the red aircraft, and cannot anticipate the conflict.
Figure 7.
Situations in which a state-based conflict detection method is considered unsuitable: (a) False-positive conflict, blue aircraft detects a conflict based on a linear extrapolation of the current state of the red aircraft; (b) False-negative conflict, blue aircraft has no knowledge of the future turn of the red aircraft, and cannot anticipate the conflict.
Figure 8.
Projection-based conflict detection method: if intersecting paths are detected, the intruder is projected linearly from the intersection point, and a linear detection algorithm is applied: (a) Intersecting intent information is detected between two aircraft in constrained airspace; (b) Aircraft states are projected linearly from the intersection point (dashed lines) such that a state-based conflict detection method can be applied.
Figure 8.
Projection-based conflict detection method: if intersecting paths are detected, the intruder is projected linearly from the intersection point, and a linear detection algorithm is applied: (a) Intersecting intent information is detected between two aircraft in constrained airspace; (b) Aircraft states are projected linearly from the intersection point (dashed lines) such that a state-based conflict detection method can be applied.
Figure 9.
Safety metrics of the projected conflict detection method when compared to the baseline state-based method: (a) Total number of conflicts per scenario in function of the traffic density; (b) Number of conflicts per scenario that occurred within the constrained airspace in function of traffic density; (c) Total number of intrusions per scenario in function of traffic density; and (d) Number of intrusions per scenario that occurred within constrained airspace in function of traffic density.
Figure 9.
Safety metrics of the projected conflict detection method when compared to the baseline state-based method: (a) Total number of conflicts per scenario in function of the traffic density; (b) Number of conflicts per scenario that occurred within the constrained airspace in function of traffic density; (c) Total number of intrusions per scenario in function of traffic density; and (d) Number of intrusions per scenario that occurred within constrained airspace in function of traffic density.
Figure 10.
Distributions of the earliest detection time of conflicts that resulted in an intrusion for the three detection method cases compared to the baseline case for a high density scenario: (a) Distribution for the projection-based case; and (b) Distribution for the projection-based and state-based case.
Figure 10.
Distributions of the earliest detection time of conflicts that resulted in an intrusion for the three detection method cases compared to the baseline case for a high density scenario: (a) Distribution for the projection-based case; and (b) Distribution for the projection-based and state-based case.
Figure 11.
Intrusion prevention rate for the conflict detection methods.
Figure 11.
Intrusion prevention rate for the conflict detection methods.
Figure 12.
Efficiency metrics of the projected conflict detection method when compared to the baseline state-based method: (a) Average flight route length efficiency per scenario in function of traffic density; and (b) Average flight route duration efficiency per scenario in function of traffic density.
Figure 12.
Efficiency metrics of the projected conflict detection method when compared to the baseline state-based method: (a) Average flight route length efficiency per scenario in function of traffic density; and (b) Average flight route duration efficiency per scenario in function of traffic density.
Figure 13.
Safety metrics of the heading-based conflict resolution algorithm when compared to the baseline method for open airspace: (a) Average number of conflicts in open airspace per scenario in function of traffic density; and (b) Average number of intrusions in open airspace per scenario in function of traffic density.
Figure 13.
Safety metrics of the heading-based conflict resolution algorithm when compared to the baseline method for open airspace: (a) Average number of conflicts in open airspace per scenario in function of traffic density; and (b) Average number of intrusions in open airspace per scenario in function of traffic density.
Figure 14.
Safety metrics of the modified turning method when compared to the baseline turning method: (a) Total number of conflicts per scenario in function of traffic density; (b) Number of conflicts per scenario that occurred within a constrained airspace in function of traffic density; (c) Total number of intrusions per scenario in function of traffic density; and (d) Number of intrusions per scenario that occurred within constrained airspace in function of traffic density.
Figure 14.
Safety metrics of the modified turning method when compared to the baseline turning method: (a) Total number of conflicts per scenario in function of traffic density; (b) Number of conflicts per scenario that occurred within a constrained airspace in function of traffic density; (c) Total number of intrusions per scenario in function of traffic density; and (d) Number of intrusions per scenario that occurred within constrained airspace in function of traffic density.
Figure 15.
Classification of intrusions in function of the layers in which the aircraft were when the loss of separation event occurred, averaged over high-density scenarios.
Figure 15.
Classification of intrusions in function of the layers in which the aircraft were when the loss of separation event occurred, averaged over high-density scenarios.
Figure 16.
Efficiency metrics of the modified turning method when compared to the baseline turning method: (a) Average flight route length efficiency per scenario in function of traffic density; (b) Average flight route duration efficiency per scenario in function of traffic density.
Figure 16.
Efficiency metrics of the modified turning method when compared to the baseline turning method: (a) Average flight route length efficiency per scenario in function of traffic density; (b) Average flight route duration efficiency per scenario in function of traffic density.
Table 1.
Number of aircraft per one-hour scenario for each traffic density.
Table 1.
Number of aircraft per one-hour scenario for each traffic density.
| Density | Number of Missions per Scenario | Peak Aircraft Density per sq. km |
|---|
| Very Low | 1660 | 1.74 |
| Low | 3340 | 3.48 |
| Medium | 4990 | 5.47 |
| High | 6650 | 7.46 |
| Very High | 8290 | 9.95 |
Table 2.
Simulated aircraft specifications.
Table 2.
Simulated aircraft specifications.
| Internal Aircraft Name | MP20 | MP30 |
|---|
| Max horizontal speed (m/s) | 13 | 18 |
| Average cruise speed (m/s) | 10 | 15 |
| Max vertical speed (m/s) | 5 | 5 |
| Min vertical speed (m/s) | 0 | 0 |
| Max take-off mass (kg) | 15 | 15 |
| Max acceleration/deceleration (m/s2) | 3.5 | 3.5 |
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}