1. Introduction
There is an increasing trend towards using autonomous systems cross a wide range of real-world applications where human presence is deemed unnecessary or dangerous. Nowadays, Unmanned Vehicles (UVs) are deployed for various missions including accompanying troops in the battlefield, security enforcement, surveillance, etc. As the mission becomes more complicated, they may need to accomplish multiple tasks in dynamic environments. Completion of the successful mission depends not only on the smooth exploration of the workspace but also on the accomplishment of a set of tasks spread over an extended region [
1].
It is always difficult for a single agent system to perform a wide range of missions, due to its limited adaptation, non-flexibility and low reliability characteristics. On the other hand, multi-agent systems are very popular for their robustness and self-adaptation capacity [
2]. They are getting more and more emphasis and research focus [
3,
4]. Productivity enhancing and vehicle safety are the two main factors that should be satisfied in all stages of multi-agent planning [
5].
Planning a safe and efficient path for each UV is still one of the challenges for mission planning. Obstacle avoidance, as well as collision avoidance among agents, plays an important role in the context of managing multiple agents [
6]. On the way to the selected locations, all UVs should be able to avoid obstacles by replanning their path dynamically.
Sharing the burden among multiple agents can improve the effectiveness of a mission [
7]. During planning, the paths for all UVs in the scenario are determined by assigning certain number of tasks to each individual UV. In such scenarios, UVs are required to move in the search space through the designated locations associated with the given task [
7]. Complications arise during decision making like, “who will go to which locations in what order” [
7]. Furthermore, when UVs move together, there is a risk of colliding with each other. Efficient coordination among multiple agents is the key requirement for successful mission planning [
8]. Hence, an effective cooperative path planning with task assignment should be needed to make the mission successful.
It is not an easy task to measure the performance of mission planning algorithms and compare one with the other. Moreover, planning approaches are different in structure and their implementations depends on the representations of the environments [
9]. The performance of a framework depends on several factors that are related to the solution of the tasks for which the framework is being used [
9]. In a mission, different types of uncertainty, such as break down of UVs, and task switching (to reduce the mission competition time) exist. An efficient framework is needed to address these challenges.
This work addresses the comparison between two different frameworks proposed by Sumana et al. [
10,
11]. The extension of the work in [
10] is also developed in this paper. Both frameworks are based on the Particle Swarm Optimization (PSO) method and are used for efficient cooperative path planning for a multi-agent system. PSO offers a high-quality solution and fast computation for solving different complex problems. In terms of path planning, it leverages the advantages of the heuristic and random search strategies used in PSO. Both frameworks can efficiently work in complex environments. Simultaneous replanning is applied to replan a new path by avoiding both static and dynamic obstacles. Both approaches are capable of avoiding collisions among agents. Here, the co-operative manner of path-planning with integrated collision avoidance is combined with the task assignment problem. It is assumed that information collected by sensors is shared among all agents. Thus, each agent has information about the other agents’ positions. Multiple agents can automatically arrange the total given task and dynamically adjust their motion. Sumana et al. [
11] proposed a Compromise View (CV) model as the task allocation approach. A Nearest-Neighbour Search (NNS)-based task allocation model is proposed in [
10].
The contribution of this paper is to analyze and make comparative assessment of these two models. Moreover, this paper addresses whether the NNS approach is capable of dealing with uncertainties such as break down of any agents. In addition, this paper addresses the complicated situation where the number of agents is less than the number of tasks. To increase the efficiency of the total planning, agents also have the capability to a switch few of their assigned tasks to another agent who has already finished its tasks. Simulation results validate the effectiveness of the NSS model over the CV model.
The rest of the paper is organized as follows:
Section 2 describes the literature review related to this topic.
Section 3 states the problem under consideration more precisely.
Section 4 defines the frameworks and describes the methodology of the total planning. Simulation results and discussions are presented in
Section 5. The concluding remarks are given in
Section 6.
2. Related Work
Since the 1960s, much research has been conducted on path planning [
12,
13,
14,
15,
16]. Generally, there are two approaches of path planning. One is centralized and the other one is decentralized. In a centralized approach, the planner computes the path in a combined configuration space and treats the agents as a single combined agent [
17]. Clark et al. [
18] used dynamic networks that coordinate centralized planning for effective motion planning of multiple mobile agents. On the other hand, the decentralized approach computes a path for each agent independently [
17]. The decentralized approach is a generalization of behavior-based control of agents and they are faster than the centralized approaches. Cascone et al. [
19] used a decentralized approach in multiple agent planning.
Recently, swarm agent systems based on the concept of swarm intelligence have become a very active research area for multi-agent systems. Particle swarm optimization (PSO) [
20] based on the concepts of swarm intelligence, has become an excellent optimization tool. It generates a high-quality solution with low computational time [
21]. It has few parameters and it can converge in a very fast manner [
22]. Compared with other methods, such as genetic algorithms [
23], PSO gets better results in a faster and cheaper way. Leveraging the qualities of rapid search and easier realization, PSO attempts to solve the drawbacks of conventional/existing methods [
24]. Sumana et al. [
25] used PSO based algorithm to solve path planning problems.
In the context of multi-agent systems, path planning problems become more complicated when solving for obstacle avoidance and collision avoidance among agents [
6]. Zhang and Zhao [
26] proposed an A*-Dijkstra-Integrated algorithm for multiple agents without any collision. Peng et al. [
27] proposed an improved D* Lite algorithm with a fast replanning technique. However, in most of the research, the agents are considered as point objects and only consider the static environments. Moreover, most of the planner implies a very limited class of mission execution [
28], such as single start to single goal [
29,
30].
In many mission planning problems, a group of agents need to execute a series of tasks on their way to the destination. There has been a considerable amount of work carried out on task assignment problems. An optimal assignment algorithm is used by Kwok et al. [
31] to complete multiple targets in a multi-agent scenario. Akkiraju et al. [
32] proposed an effective agent-based solution approach. To achieve cooperation between autonomous agents, Noreils [
33] proposed an effective planning method. However, the focus of those algorithms is only on task allocation problems without combining it with path planning. Path planning combined with task assignment is a NP-complete problem [
1]. Berhault el al. [
34] utilize the advantage of combinatorial actions to coordinate a team of mobile robots to visit a number of given targets in partially unknown terrain.
Mission planning combined with task assignment becomes more complicated when it works in the dynamic environments. Multi-agent path planning in dynamic environments is proposed by Jan et al. [
35]. An evolutionary approach to a cooperative mobile robotic system is implemented by Yu et al. [
2]. Maddula et al. [
1] provide an excellent overview of multi-target assignment as well as path planning for a group of agents. A negotiation-based algorithm is applied by Moon et al. [
7,
36] for assigning tasks to agents. To find the shortest path in a dynamic environment, they combined this algorithm with the A* search algorithm [
37]. Zhu and Yang [
38] applied a neural-network-based approach to solve dynamic task assignment of a multirobot system. However, most of the research work does not consider the size constraint of the agents. Moreover, to optimize the computational cost, most of the existing approaches do not have an efficient replanning capacity.
Sumana et al. [
10,
11] proposed two different frameworks of a multi-agent system for cooperative task assignment combined with path planning. This work is the extension of the previous work, which compares both frameworks from [
10,
11]. Furthermore, in this paper, the better framework is extended to deal with the breakdown problems in addition to switching workload to make the mission time efficient.
3. Problem Description
Consider a given number of agents, M = {M1, M2, …… Mi} and a task set, T = {T1, T2, …… Ti} that needs to be completed by the agents. The target locations are randomly distributed in the planned area. The position of the target location is denoted by (XiT, YiT), i = 1, 2, … T. The position of agents ‘m’ is given by (XiM, YiM), i = 1, 2, … M. Here ‘M’ < ‘T’. Without loss of generality, the task is to visit a number of target locations. Each agent is required to visit at least one location.
The challenge is assigning the number of tasks to multiple vehicles on its way to the destination. O = {O
1, O
2, …… O
i} is the set of static and dynamic obstacles that remain in the scene at a given time instant. In this problem, let each agent initially be located at some initial point ‘S’, and ‘F’ be the final goal location. The flexibility of the planning is that it is not necessary that the goal point of each agent will be the same; they can be different as well. If ‘P’ is the path, the assigned path to each agent is given by: Pi = {(X
iM(s), Y
iM(s)), (X
i1T, Y
i1T), … (X
iTT, Y
iTT), (X
iM(f), Y
iM(f))}. On its path, agents need to avoid any types of obstacles. For this stage, the total solution concept is adopted from Sumana et al. [
10,
11]. The sequences of the problem and the rules are given below.
Divide the total set of tasks into subset of tasks.
Assign subset of tasks to individual agents.
Agents must ensure collision free path while following their paths. Therefore, the paths of all agents solved by the proposed framework should be admissible.
Agents must find the shortest path.
Tackle unwanted situations such as break down of any agent.
If needed task switching can be applied.
Here some assumptions are considered to simplify the representation. In the real world, autonomous agents and obstacles are of heterogeneous shapes, so a circle is considered around the agents and obstacles. Here, the agents are modelled as a circle with R1 radius. It is also considered that the agent moves at a constant speed without any restriction on turning.
A safety gap is considered by extending the radius of the enclosed circle for both agents and obstacles. One agent considers the other agents as dynamic obstacles and apply the same collision avoidance strategy.
It is also considered that each agent has information about other agents and about surrounding environments.
4. Solution Approaches
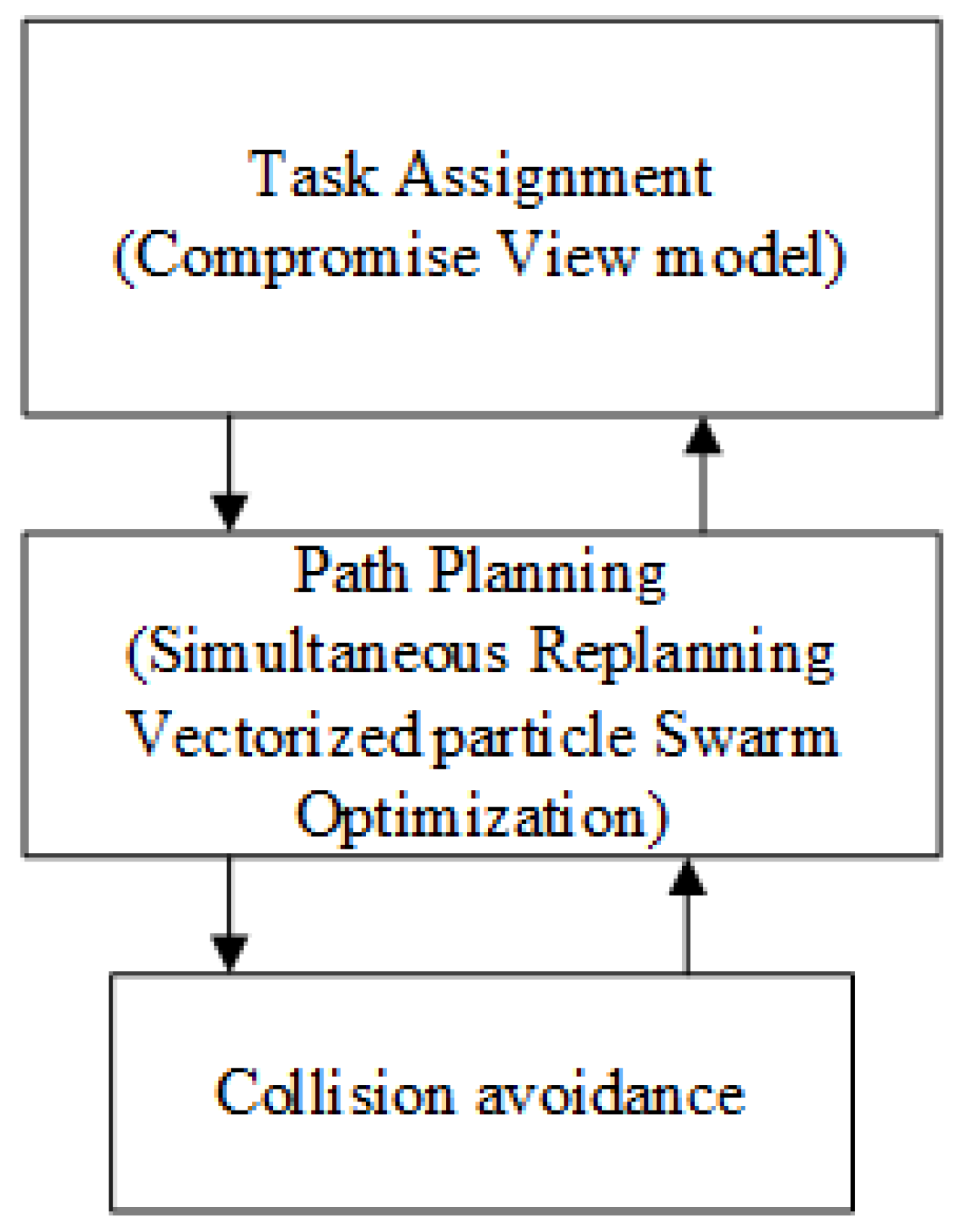
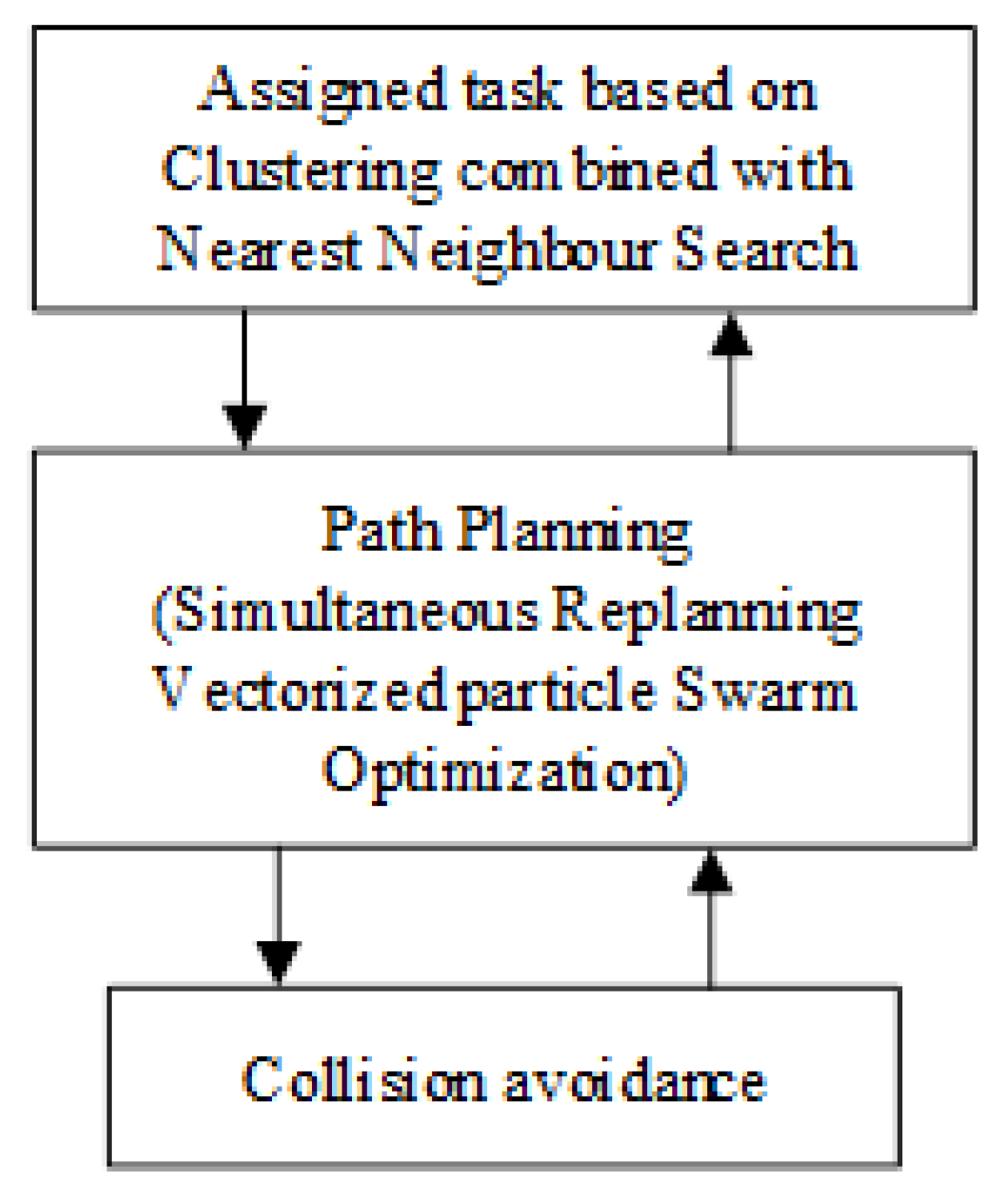
The frameworks are composed of three layers. They are Path planning, Task allocation and Collision avoidance.
Figure 1 and
Figure 2 present the frameworks for the cooperative mission planning.
Figure 1 shows the CV model and
Figure 2 describe the NNS model.
In a multi-agent system, the integration of the task assignment layer with the path planning layer is the most significant part for architecting a mission planner [
7]. In the CV model, the task assignment layer gets the cost information from the path-planning layer, where the cost is the selecting criterion for task assignment. On the other hand, in the NNS model, the task assignment layer collects information about the target locations. Based on this information, a cluster of tasks is formed. A combination of the clustering method with the Nearest-Neighbour Search model is used to assign tasks to each agent. Iterations continue within these two layers, until a feasible solution for task assignment is found.
The objective of the path planning layer and the collision avoidance layer is to do a similar task of finding a collision-free path. The only difference is that the collision avoidance layer replans a path to avoid collisions. Hence, these two layers work in a complementary manner to generate a collision-free path efficiently.
4.1. Path Planning Layer
In 1995, Kennedy and Eberhart introduced PSO [
20]. PSO works with a swarm population of particles that represents a possible solution. It adjusts its exploration and exploitation capacity of search according to its own and its companion’s flying experience. The personal best position is the best solution that is found by the particle in the course of flight. The best position of the whole flock is the global best solution [
38]. Particles update their positions by updating their velocities. The updating process runs until an optimum solution is reached. The particles update their velocities and positions by the following equations:
where, c
1 = cognition parameter, c
2 = social parameter, ω = inertia weight factor, and r
1, r
2 are independent random numbers uniformly distributed in [0, 1]. x
pbest is the personal best position achieved by the particle and x
gbest is the global best position achieved by the entire swarm of particles.
By updating their velocities and positions, a new generation forms and particles move forward for a better solution. Ultimately, all particles converge onto the optimal solution. Practically, the fitness function of the optimization problem assesses the solution to which the particle is good or bad [
39].
In this work, the Simultaneous Replanning Vectorized PSO (SRVPSO) algorithm from [
29] is applied. Algorithm 1 describe the SRVPSO algorithm.
Algorithm 1: Simultaneous Replanning Vectorized
Particle Swarm Optimization for Path Planning |
Input: Number of population (swarm_size), maximum
number of iterations (max_it), Initial positions (xs),
Goal position (xF), Initial velocity (v), c1, c2, ω.
Output: Way-points |
1. while number of iteration ≤ max_it do
2. for each particle
3. evaluate fitness function
4. if fitness (x) > fitness (pbest); pbest = personal best
5. pbest = x
6. if fitness (x) > fitness (gbest); gbest = global best
7. gbest = x
8. update particle’s position and velocity according to Equations (2) and (3)
9. for each particles position check the risk of collisions
10. calculate the distance between obstacles and particles, Dpobs
11. if Dpobs > 0; no collision
12. else Dpobs ≤ 0; collision is likely to place
13. Replan the path to avoid obstacles.
14. end if
15. end for
16. end if
17. end for
18. gbest = parameters of best solution
19. end while |
4.2. Task Allocation Layer
Task allocation is the most significant part of the aforementioned frameworks. Algorithm 2 and Algorithm 3 describe the task assignment layers, used by Sumana et al. [
10,
11], and their comparisons are given below.
| Algorithm 2: Algorithm for Task Assignment (k-NNS model) |
Input: All target locations (Ti,), All agents (Mi)
Output: Assigned target locations Tj Ti, for jth agent Mi |
1. Divide all target locations Ti into number of clusters C using k-means clustering
2. Calculate the centroid of the clusters
3. for all Mi
4. Calculate the nearest cluster Cnearest considering closest distance between the centroid of the clusters and the position of the agents
5. Assign Tj targets inside the cluster for jth agent
6. end for
7. return Tj |
| Algorithm 3: Algorithm for Task Assignment (CV model) |
Input: All target locations (Ti,), All vehicles (Mi)
Output: Assigned target locations Tj ∈ Ti, for jth agent Mi |
1. Calculate the associated cost with all the target locations
2. All agent chose its first target with the lowest cost.
3. for all Mi
4. Conflict arise, when more agents select the same target location
5. Resolve conflict by applying CV model; conflicting agents compare their costs and the agent with lowest cost is assigned to cover the target location.
6. Repeat step 1 to 5 until all the agents are assigned a target location
7. end for
8. return Tj |
4.2.1. Compromise View (CV) Model
The CV model by Sumana et al. [
11] is used to select targets and assign them to agents. This approach is a heuristic method and it keeps updating until all the target locations are visited by the agents. The CV model is performed in the following manner.
(I) Until all the Target Locations are Visited by the Agents
Each agent calculates the cost associated with all the target locations and chooses its first target with the lowest cost. Let,
is the current coordinate of ‘M’ agents and (
is the coordinate of ‘T’ targets. The cost is defined as follows:
Here, PD is the path distance from the current position of the agent to the target location. All agents get information about the choices of other agents. A conflict arises when more agents select the same target location. The following actions are taken to resolve the conflict:
This conflict is resolved by the compromising view of the conflicting agents, i.e., conflicting agents compare their costs and the decision goes in favour of the agent with the lowest cost.
Iteration is carried over all the agents and targets until all conflicts are resolved or all the agents are assigned a task in the current cycle.
(II) Repetition of step I
When each agent is assigned with a task, the path planning layer starts to plan a feasible path.
4.2.2. Nearest-Neighbour Search (NNS) Model
This NNS model is used by Sumana et al. [
10] for task assignment purposes. Here, k-means Clustering is used to divide all the target locations into a number of clusters. The number of clusters is the same as the number of agents. At the next step, the NNS model is applied to assign the cluster of tasks to individual agents. Each agent calculates the distance between its own position and the centroid of the cluster, then the cluster of tasks that are near to agents is assigned their target locations. If the same cluster is assigned to more than one agent, a conflict may arise as to who will cover the assigned cluster of tasks. A cluster refined technique is applied to resolve the conflict. By the refining process, once the cluster of target locations assigned to its nearest agent, it will remove from the clustering list. Thus, this cluster will no longer be assigned to other agents. Finally, when each agent is assigned with a cluster, the algorithm goes to its next stage of path planning by covering all of its assigned tasks.
4.2.3. Comparison between CV Model and NNS Model
In the CV model, tasks are assigned to agents in a sequential manner. That is the main drawback of this method. At each iteration, the distance between agents’ current position and the entire target locations are needed to be calculated that is time consuming. Hence, the computational time of this method is high.
On the other hand, in the NNS model, at the very beginning of the method, all targets are clustered according to the number of agents. Here a group of targets is assigned at a time to individual agents. This procedure is less time consuming.
Table 1 shows the comparison between these two models. From the
Table 1, it is found that the computational time of CV model is higher than the NNS model. Hence, the NNS model is more computationally time-efficient than the CV model. However, it takes a longer path than the CV model.
4.3. Collision Avoidance Layer
In multi agent planning, agents have to work simultaneously on the same work space. To find the shortest trajectory that avoids collision with obstacles and collision with other agents is still a significant challenge for the planner [
40]. Agents need to take necessary action as soon as they detect the position and movements of obstacles. In this case, coordination and cooperation among agents are the key concern of safety planning. Furthermore, they require replanning their path to avoid the risk of collisions. Here, one agent considers the others as dynamic obstacles and applies the same obstacle avoidance strategy to avoid collisions among them.
The collision avoidance strategy is integrated with path planning layer. It works as a reactive planner. A two-stage collision avoidance strategy is followed in this SRVPSO algorithm. The strategy is explained as follows:
Stage I: each particle calculates the cost (distance) from its current location to the obstacles position. Let D
pobs be the distance between each obstacle and the particles, shown in
Figure 3.
Rules for collisions occurrence:
If Dpobs > 0, no collision, move to next step.
If Dpobs ≤ 0, collision is likely to take place, then agents have to replan their path according.
Here, the negative value of the cost means that the trajectory of the particles is within the collision zone. The fitness value of the particles within the risk zone is manipulated by a higher positive value. This optimization problem is a cost minimization problem and the particles with higher cost are considered to have the worse fitness function. Thus, the trapped particles in the collision zone are ignored and the path within the zone is infeasible.
Stage II: To overcome the unbalanced scenario in the swarm population, the trapped particles are recovered. The parameters of PSO algorithm recovering procedure is carried out by increasing the values of the PSO parameters that increase the velocity of these particles. Thus, they can be recovered from the collision zone.
By applying this strategy, multi-agents can easily avoid any type of collision and replan the path that is admissible.
5. Simulation Results and Discussions
The SRVPSO algorithm is coded in MATLAB R2016b and tested on a Windows computer with Intel(R) Core(TM) i7-4770 CPU @3.40 GHz and 16.0 GB of RAM.
The parameters of PSO used in the tests have been chosen by running several tests with different combinations. The preferred combinations of parameters are as follows:
ω = 1.0, c1 = 0.5, c2 = 2.0
Population size of swarms (agents) = 25 and
Maximum iterations = 50
Parameters considered for collision avoidance strategy are as follows:
These increased parameter values help the trapped particles to recover.
To evaluate the performance of the total framework, several tests on different cases are simulated. A two dimensional 120 × 120, 100 × 110, and 300 × 300 square unit environment is considered as the search space. Different types of working environments with different types of obstacles with several numbers of task assignments are considered. For each configuration, all the simulations run several times.
The solid circles represent the static obstacles and the hollow circles represent the dynamic obstacles (
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13 and
Figure 14). The hollow circles’ sequence represents the trajectory of dynamic obstacles. In
Figure 4,
Figure 5,
Figure 6 and
Figure 7, the agents are represented as small circles. The rest of the figures show the tracked path of the agents during path planning covering the target locations.
The dynamic obstacles can have the constant speed, or they can be randomly moving objects. The diamond shapes represent the target locations that the agents need to visit. Different types of scenarios for mission planning are considered below.
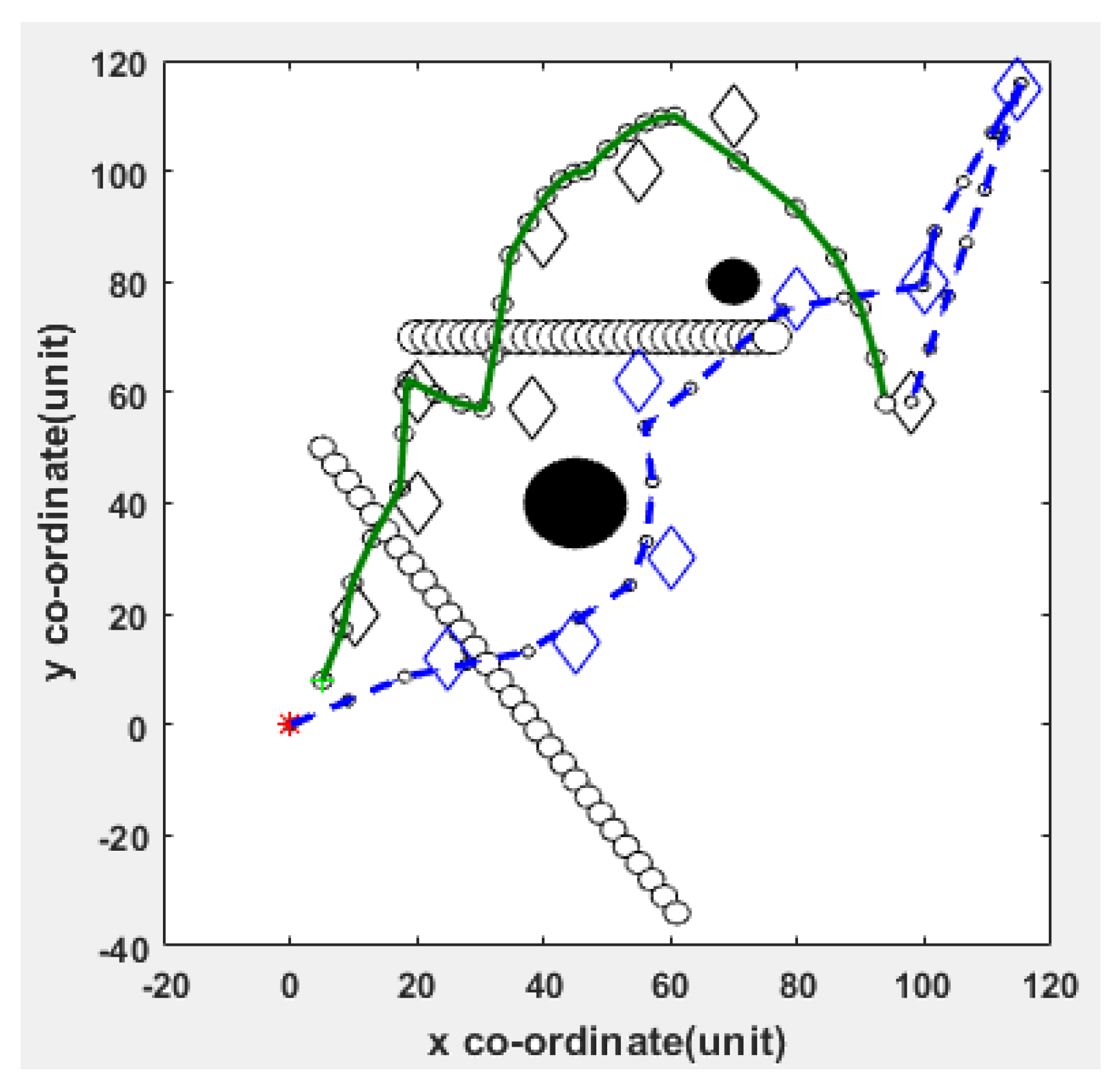
5.1. Static and Dynamic Environments with Various Number of Agents and Targets
Figure 4 and
Figure 5 show the path planning and task assignment problem for two agents in the dynamic environments.
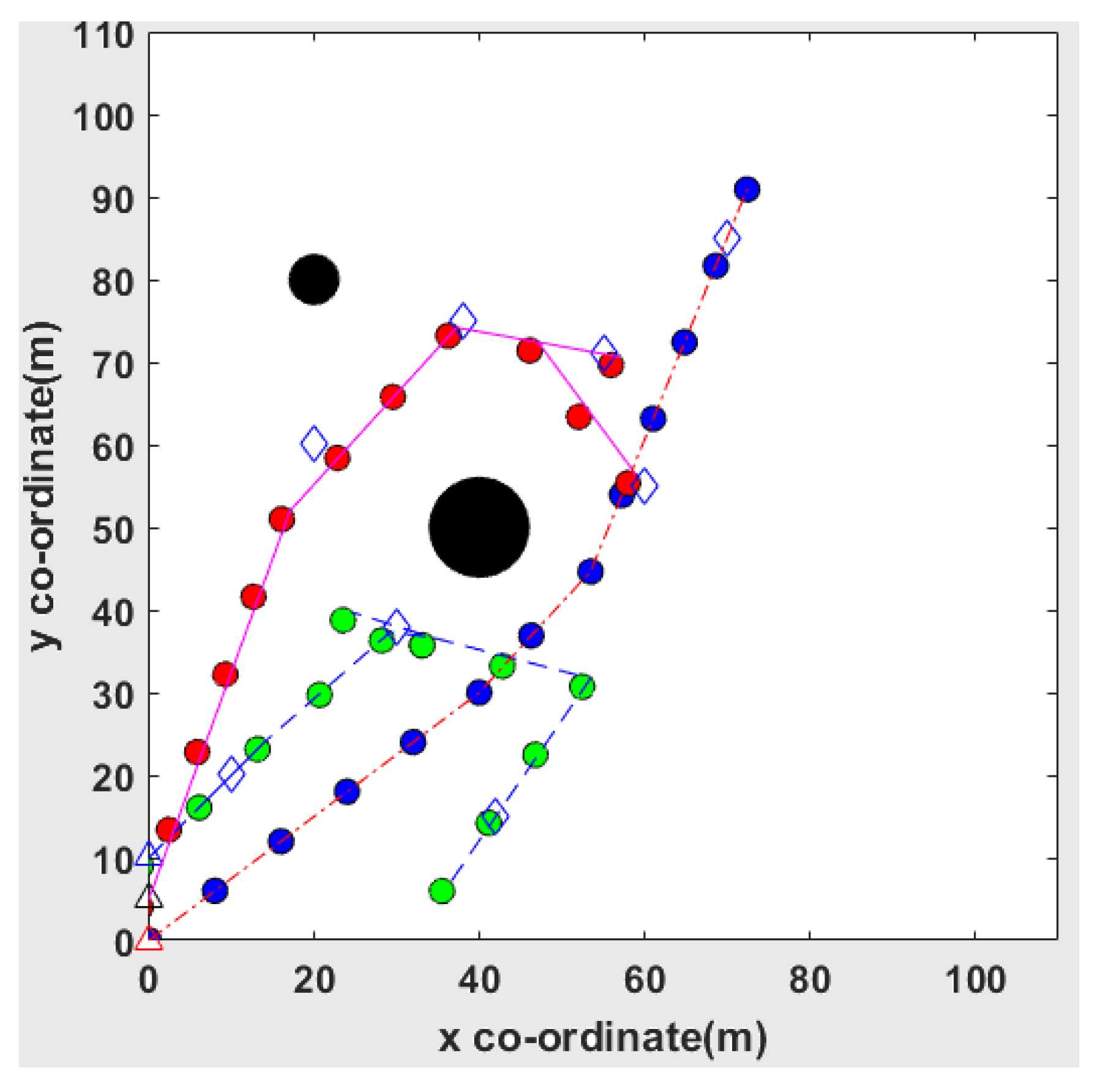
In
Figure 3, the number of assigned targets is fifteen whereas in
Figure 4 the number of assigned targets is sixteen. In
Figure 3 both agents come in the same goal position, and in
Figure 4 agents reached in different goal locations. Here, the task assignment problem is solved by using the CV model.
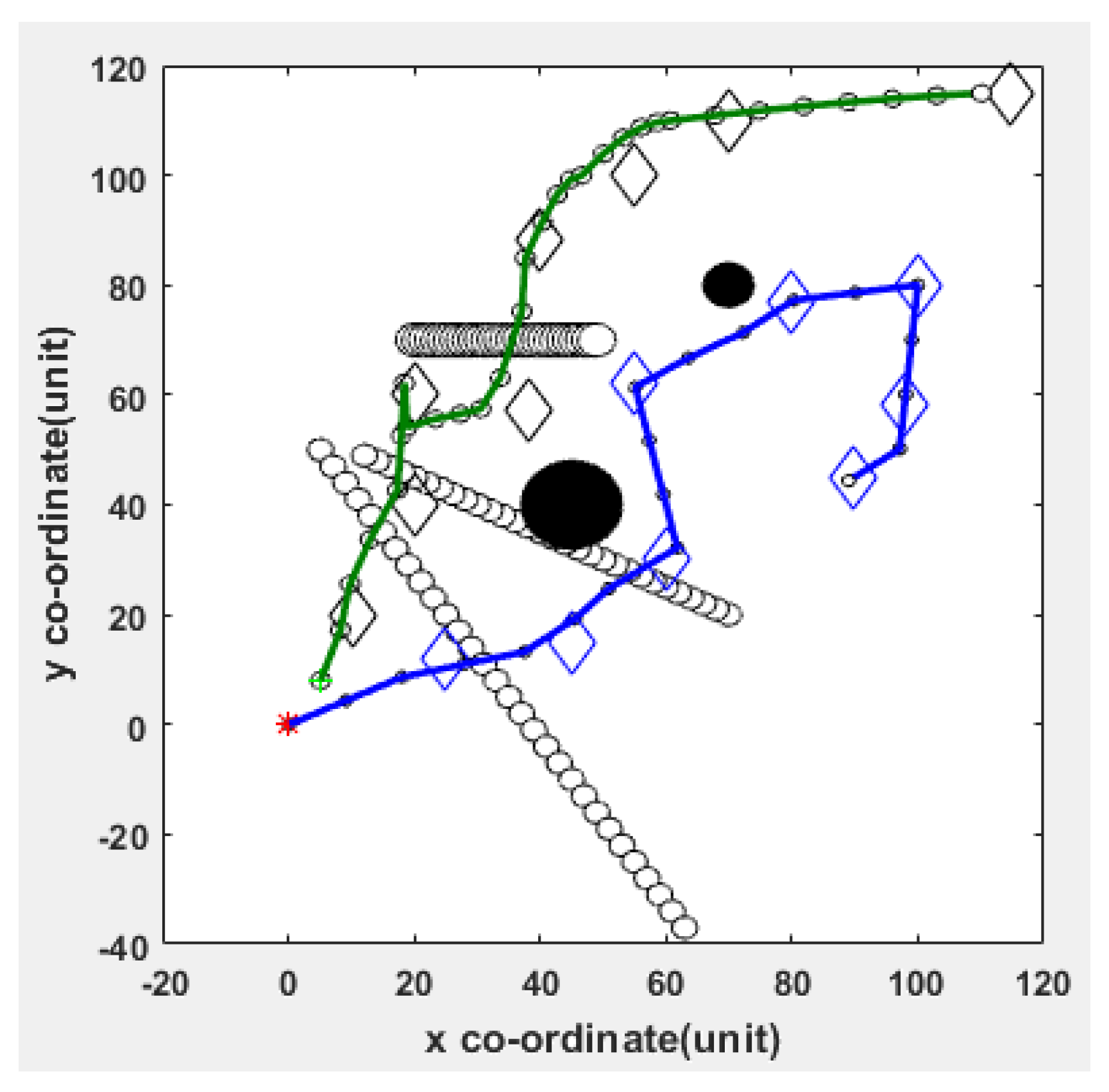
Figure 6 shows the path planning and task assignment problem of three agents in the static environment. Here, the number of target locations is eight.
Figure 7 shows the path planning of three agents combined with task assignment problem in a complex environment. In
Figure 7, the workspace is surrounded by three static and two dynamic obstacles. From both figures, it is found that the NNS model is capable of planning efficient paths for each agent by covering all the given target locations.
Figure 8 shows the path planning of five agents in static environment.
Figure 9 shows the path planning for three agents in complex environments. In both figures, agents complete their mission by visiting 20 target locations.
From
Figure 6,
Figure 7,
Figure 8 and
Figure 9, it is clear that the framework with the NNS model is applicable to the case where the number of agents and targets can be given randomly. Moreover, by using this framework agents can efficiently complete their mission in any types of environment.
5.2. Breakdown of some Agents
The NNS-based framework can efficiently tackle some uncertainties such as the breakdown of any agents on its way.
Figure 10 and
Figure 11 show the path planning of 3 agents while visiting 20 target locations in static environments. Both figures show the situation where agent-1, agent-2 and agent-3 are assigned with 20 tasks. Number of tasks for agent-1, agent-2 and agent-3 are seven, seven and six, respectively.
In
Figure 10 it is found that all three agents can successfully complete their assigned tasks, whereas in
Figure 11 it is found that agent-3 is unable to continue its journey after visiting three target locations. However, the remaining two agents mutually complete the remaining tasks of agent-3. Finally, all the assigned tasks are completed by the agents.
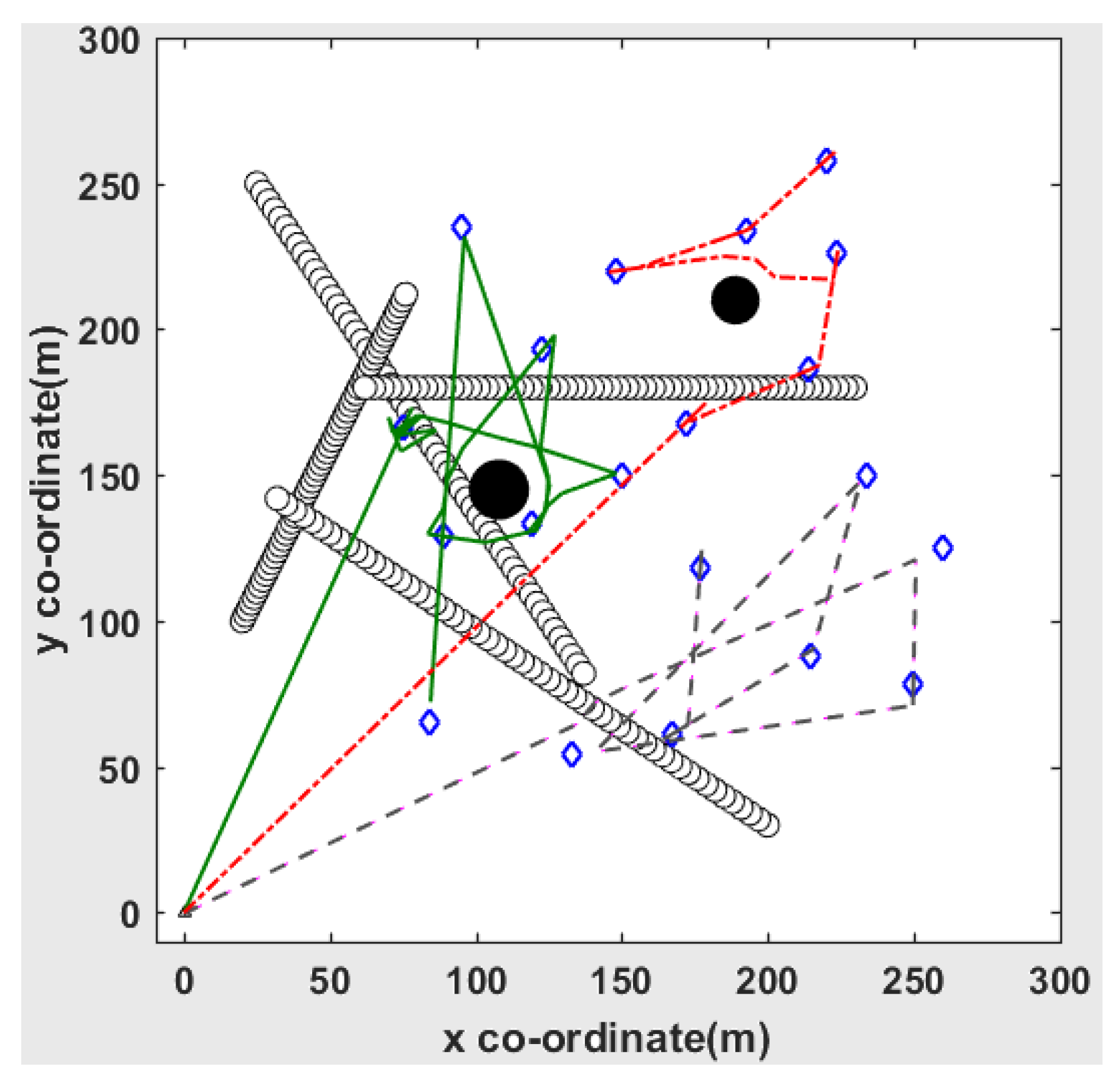
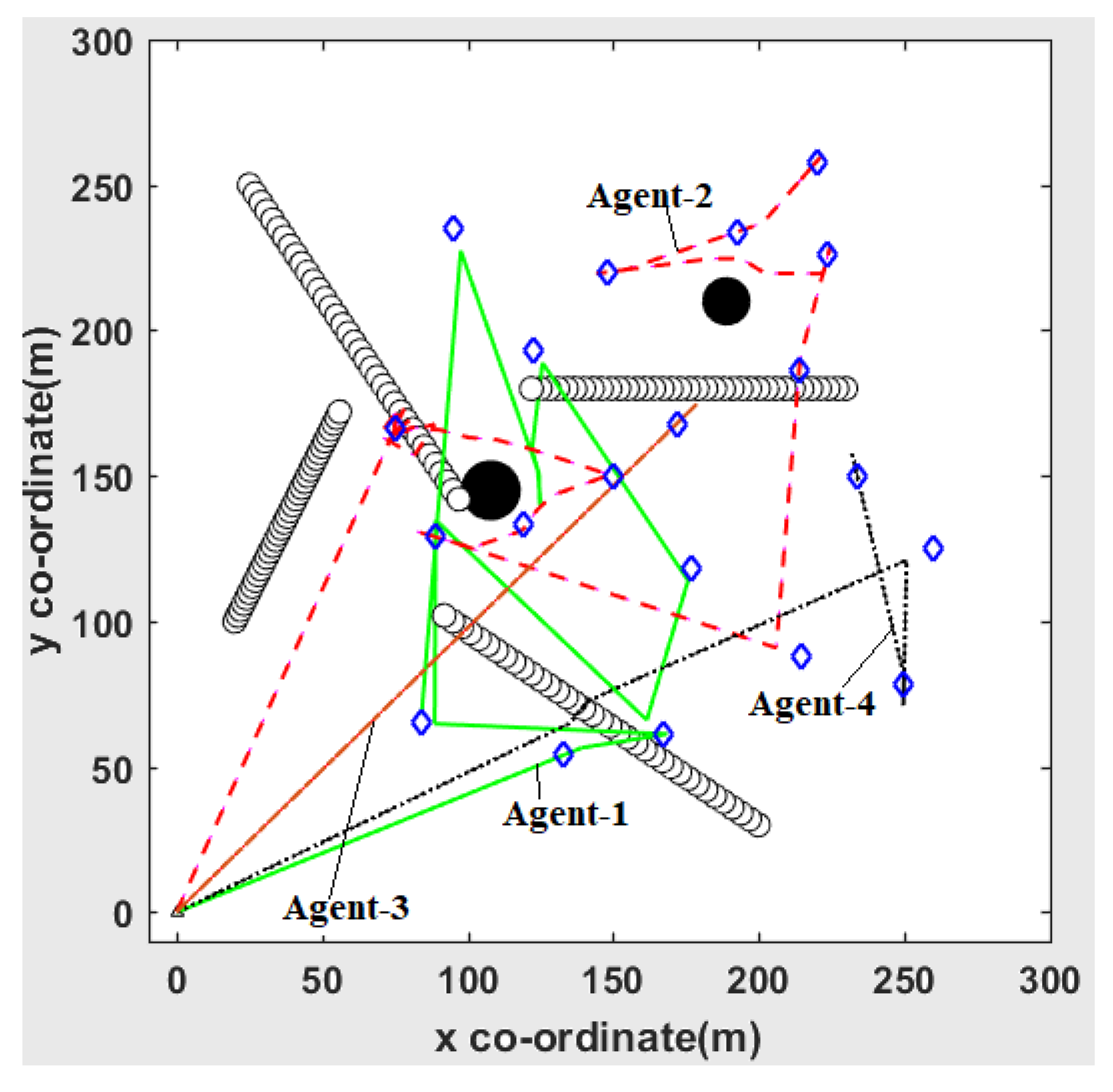
Figure 12 shows a sudden change of situation, where two of four agents are broken down at some period of time. It describes the planning in a complex environment where the workspace is surrounded by two static and four dynamic obstacles. From
Figure 12 it is found that agent-3 and agent-4 are not capable of doing their tasks after visiting one and four target locations, respectively. However, the other agents complete the rest of the tasks efficiently.
5.3. Task Switching
The robustness of the NNS-based approach is that the agents are capable of switching their tasks. One agent can switch some of its tasks to another agent that has already finished its own assigned task.
Figure 13 and
Figure 14 show the situation where two agents plan their paths by completing their individual assigned tasks in a dynamic environment. The number of assigned tasks to agent-1 and agent-2 is 16 and 9, respectively. The number of assigned target locations to agent-1 is more than the number of assigned target locations to agent-2. Hence, agent-2 is able to finish all tasks before agent-1 finishes its given tasks. In this case, agent-1 switch some of its remaining tasks to agent-2. This will increase the effectiveness of the total framework. From
Figure 14 it is found that task switching occurred between two agents.
6. Conclusions
This paper focuses on the investigation and comparison of the NNS and CV model frameworks, for combining the task assignment with the path planning problem. These two frameworks are capable of cooperatively controlling a multi-agent system without any collisions. From the results, it is found that the NNS model shows better performance than CV model. Furthermore, NNS model is more time efficient than the CV model. However, it is only possible at the expense of path length. The NNS framework is robust. By using this model, agents are able to accomplish the given tasks by visiting all the target locations even in complex environments. This approach can tackle unpredictable situations such as the sudden breakdown of some agents. Furthermore, it can deal with the complicated situation where the number of agents is less than the number of targets. In addition, if required, the NNS model can increase the effectiveness of the total system by applying task switching phenomenon. That makes the NNS framework highly time-efficient. The analysis shows that it is very easy to implement and can be applied to any real-time environments.
Author Contributions
Conceptualization, S.B.; formal analysis, S.B.; investigation, S.B.; methodology, S.B.; supervision, S.G.A.; validation, S.B.; writing, original draft, S.B.; writing, review and editing, S.B., S.G.A. and M.A.G.
Funding
This research received no external funding.
Acknowledgments
The Research is supported by the Australian Government Training Program Scholarship. Our heartfelt thanks to The University of New South Wales at the Australian Defence Force academy, Canberra, Australia.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Maddula, T.; Minai, A.A.; Polycarpou, M.M. Multi-Target assignment and path planning for groups of UAVs. In Recent Developments in Cooperative Control and Optimization; Springer: Boston, MA, USA, 2004; pp. 261–272. [Google Scholar]
- Yu, Z.; Jinhai, L.; Guochang, G.; Rubo, Z.; Haiyan, Y. An implementation of evolutionary computation for path planning of cooperative mobile robots. In Proceedings of the 4th World Congress on Intelligent Control and Automation (Cat. No.02EX527), Shanghai, China, 10–14 June 2002. [Google Scholar]
- Habib, D.; Jamal, H.; Khan, S.A. Employing multiple unmanned aerial vehicles for co-operative path planning. Int. J. Adv. Rob. Syst. 2013, 10, 235. [Google Scholar] [CrossRef]
- Wang, D.; Wang, H.; Liu, L. Unknown environment exploration of multirobot system with the FORDPSO. Swarm Evol. Comput. 2016, 26, 157–174. [Google Scholar] [CrossRef]
- Zadeh, S.M.; MW Powers, D.; Sammut, K.; Yazdani, A. Toward efficient task assignment and motion planning for large-scale underwater missions. Int. J. Adv. Rob. Syst. 2016, 13. [Google Scholar] [CrossRef]
- Francis, S.L.X.; Anavatti, S.G.; Garratt, M. Real time cooperative path planning for multi autonomous vehicles. In Proceedings of the International Conference on Advances in Computing, Communications and Informatics (ICACCI), Mysore, India, 22–25 August 2013; pp. 1053–1057. [Google Scholar]
- Moon, S.; Shim, D.H.; Oh, E. Cooperative Task Assignment and Path Planning for Multiple UAVs. In Handbook of Unmanned Aerial Vehicles; Springer: Houten, The Netherlands, 2015; pp. 1547–1576. [Google Scholar]
- Sung, C.; Ayanian, N.; Rus, D. Improving the performance of multi-robot systems by task switching. In Proceedings of the Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 2999–3006. [Google Scholar]
- Ansuategui, A.; Arruti, A.; Susperregi, L.; Yurramendi, Y.; Jauregi, E.; Lazkano, E.; Sierra, B. Robot trajectories comparison: A statistical approach. Sci. World J. 2014, 2014, 298462. [Google Scholar] [CrossRef] [PubMed]
- Biswas, S.; Anavatti, S.G.; Garratt, M.A. Nearest-neighbour based task allocation with multi-agent path planning in dynamic environments. In Proceedings of the International Conference on Advance Mechatronics, Intelligent Manufacture and Industrial Automation (ICAMIMIA), Surabaya, Indonesia, 12–14 October 2017. [Google Scholar]
- Biswas, S.; Anavatti, S.G.; Garratt, M.A. Particle swarm optimization based co-operative task assignment and path planning for multi-agent system. In Proceedings of the IEEE Symposium Series on Computational Intelligence (IEEE SSCI), Honolulu, HI, USA, 27 November–1 December 2017; pp. 45–50. [Google Scholar]
- Latombe, J. Robot Motion Planning; Kluwer Academic Publishers: Norwell, MA, USA, 1991. [Google Scholar]
- Lavalle, S. Planning Algorithms; Cambridge University Press: New York, NY, USA, 2006. [Google Scholar]
- Hart, P.E.; Nilson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Redding, J.; Amin, J.; Boskovic, J.; Kang, Y.; Hedrick, K. A real-time obstacle detection and reactive path planning system for autonomous small-scale helicopters. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 2007. [Google Scholar]
- Yang, K.; Gan, S.; Sukkarieh, S. An efficient path planning and control algorithm for RUAV’s in unknown and cluttered environments. In Proceedings of the 2nd International Symposium on UAVs, Reno, NV, USA, 8–10 June 2009; pp. 101–122. [Google Scholar]
- Van Den Berg, J.; Snoeyink, J.; Lin, M.C.; Manocha, D. Centralized path planning for multiple robots: Optimal decoupling into sequential plans. In Robotics: Science and Systems; MIT Press: London, UK, 2010. [Google Scholar]
- Clark, C.M.; Rock, S.M.; Latombe, J.-C. Motion planning for multiple mobile robot systems using dynamic networks. In Proceedings of the IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; pp. 4222–4227. [Google Scholar]
- Cascone, A.; D’Apice, C.; Piccoli, B.; Rarità, L. Circulation of car traffic in congested urban areas. Commun. Math. Sci. 2008, 6, 765–784. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Wang, Y.; Chen, P.; Jin, Y. Trajectory planning for an Unmanned ground vehicle group using augmented particle swarm optimization in a dynamic environment. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 11–14 October 2009; pp. 4341–4346. [Google Scholar]
- Qiaorong, Z.; Guochang, G. Path planning based on improved binary particle swarm optimization algorithm. In Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics, Chengdu, China, 21–24 September 2008; pp. 462–466. [Google Scholar]
- Eberhart, R.C.; Shi, Y. Comparison between genetic algorithm and particle swarm optimization. In Proceedings of the International Conference on Evolutionary Programming, San Diego, CA, USA, 25–27 March 1998. [Google Scholar]
- Ma, Q.; Lei, X.; Zhang, Q. Mobile robot path planning with complex constraints based on the second order oscillating particle swarm optimization algorithm. In Proceedings of the WRI World Congress on Computer Science and Information Engineering, Los Angeles, CA, USA, 31 March–2 April 2009; pp. 244–248. [Google Scholar]
- Biswas, S.; Anavatti, S.G.; Garratt, M.A. Obstacle avoidance for multi-agent path planning based on vectorized particle swarm optimization. In Intelligent and Evolutionary Systems; Springer: Cham, Switzerland, 2016; pp. 61–74. [Google Scholar]
- Zhang, Z.; Zhao, Z. A multiple mobile robots path planning algorithm based on A-star and Dijkstra algorithm. Int. J. Smart Home 2014, 8, 75–86. [Google Scholar] [CrossRef]
- Peng, J.H.; Li, I.H.; Chien, Y.H.; Hsu, C.C.; Wang, W.Y. Multi-robot path planning based on improved D* Lite Algorithm. In Proceedings of the IEEE 12th International Conference on Networking, Sensing and Control, Taipei, Taiwan, 9–11 April 2015; pp. 350–353. [Google Scholar]
- Brumitt, B.L.; Stentz, A. GRAMMPS: A generalized mission planner for multiple mobile robots in unstructured environments. In Proceedings of the IEEE International Conference on Robotics and Automation (Cat. No.98CH36146), Leuven, Belgium, 20–20 May 1998; pp. 1564–1571. [Google Scholar]
- Biswas, S.; Anavatti, S.G.; Garratt, M.A.; Pratama, M. Simultaneous replanning with vectorized particle swarm optimization algorithm. In Proceedings of the 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016. [Google Scholar]
- Parsons, D.; Canny, J. A Motion Planner for Multiple Mobile Robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990. [Google Scholar]
- Kwok, K.S.; Driessen, B.J.; Phillips, C.A.; Tovey, C.A. Analyzing the multiple-target-multiple-agent scenario using optimal assignment algorithms. J. Intell. Rob. Syst. 2002, 35, 111–122. [Google Scholar] [CrossRef]
- Akkiraju, R.; Keskinocak, P.; Murthy, S.; Wu, F. An agent-based approach for scheduling multiple machines. Appl. Intell. 2001, 14, 135–144. [Google Scholar] [CrossRef]
- Noreils, F.R. Toward a robot architecture integrating cooperation between mobile robots: Application to indoor environment. Int. J. Rob. Res. 1993, 12, 79–98. [Google Scholar] [CrossRef]
- Berhault, M.; Huang, H.; Keskinocak, P.; Koenig, S.; Elmaghraby, W.; Griffin, P.; Kleywegt, A. Robot exploration with combinatorial auctions. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003. [Google Scholar]
- Jan, M.; Anavatti, S.; Biswas, S. Path planning for multi vehicle autonomous swarms in dynamic environment. In Proceedings of the Ninth International Conference on Advanced Computational Intelligence (ICACI), Doha, Qatar, 4–6 February 2017. [Google Scholar]
- Moon, S.; Oh, E.; Shim, D.H. An integral framework of task assignment and path planning for multiple unmanned aerial vehicles in dynamic environments. J. Intell. Rob. Syst. 2013, 70, 303–313. [Google Scholar] [CrossRef]
- Nosrati, M.; Karim, R.; Hasanvand, H.A. Investigation of the *(star) search algorithms: Characteristics, methods and approaches. World Appl. Program. 2012, 2, 251–256. [Google Scholar]
- Zhu, A.; Yang, S.X. A neural network approach to dynamic task assignment of multirobots. IEEE Trans. Neural Networks 2006, 17, 1278–1287. [Google Scholar] [PubMed]
- Omkar, S.N.; Mudigere, D.; Naik, G.N.; Gopalakrishnan, S. Vector evaluated particle swarm optimization (VEPSO) for multi-objective design optimization of composite structures. Comput. Struct. 2008, 86, 1–14. [Google Scholar] [CrossRef]
- Landry, C.; Gerdts, M.; Henrion, R.; Hömberg, D. Path-planning with collision avoidance in automotive industry. In Proceedings of the IFIP Conference on System Modeling and Optimization, Sophia Antipolis, France, 29 June–3 July 2011. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}