MIMO PID Controller Tuning Method for Quadrotor Based on LQR/LQG Theory

Abstract
1. Introduction
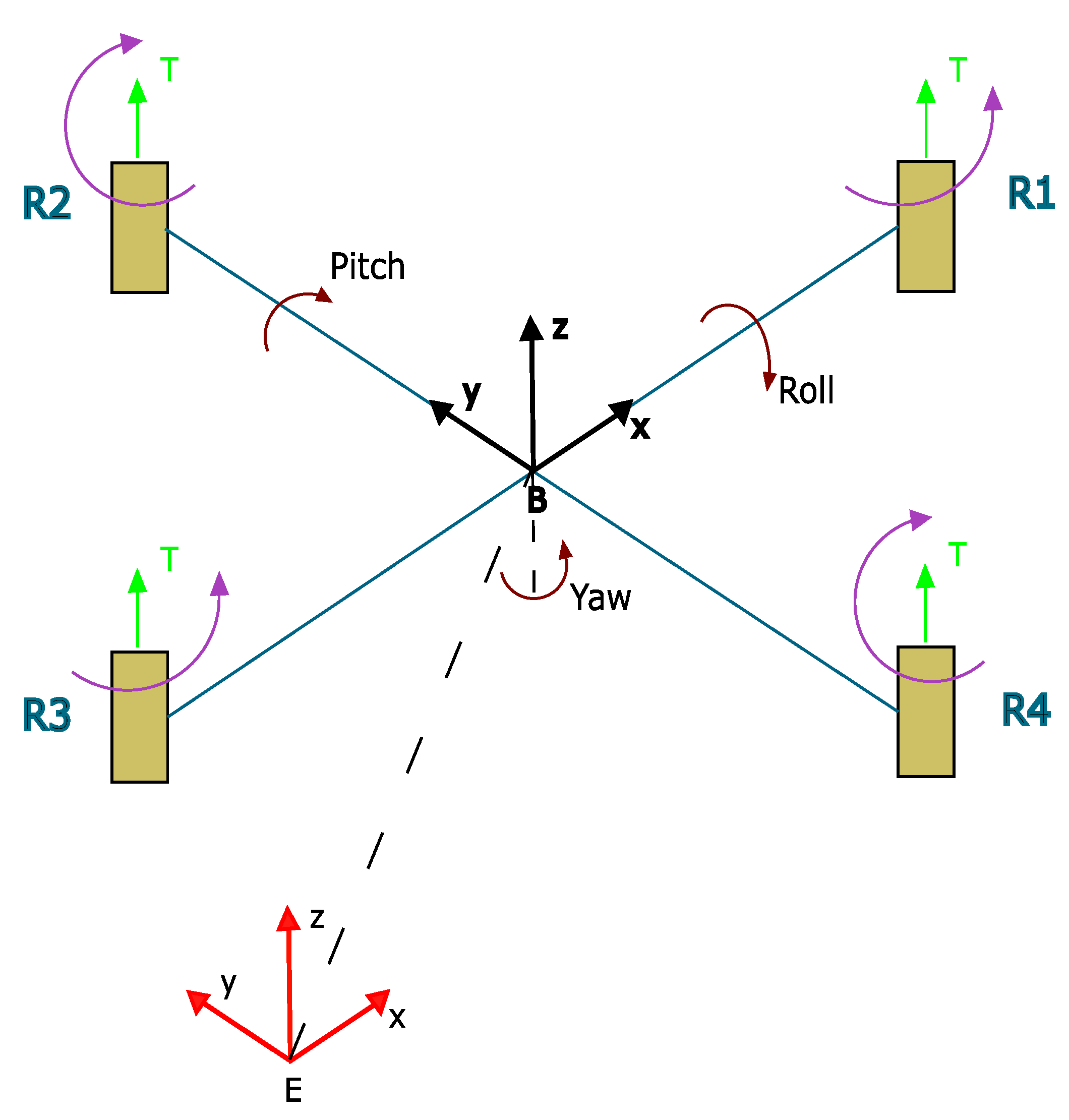
2. Mathematical Model
2.1. Analysis and Evaluation Model (AEM)
2.2. Control System Design Model (CDM)
- The CDM model does not take into account the rotor dynamics.
- The thrust and the torque are linear functions of the PWM signals duty-cycle.
- The rotational dynamical model assumes relative low angular velocities and small enough Euler angles.
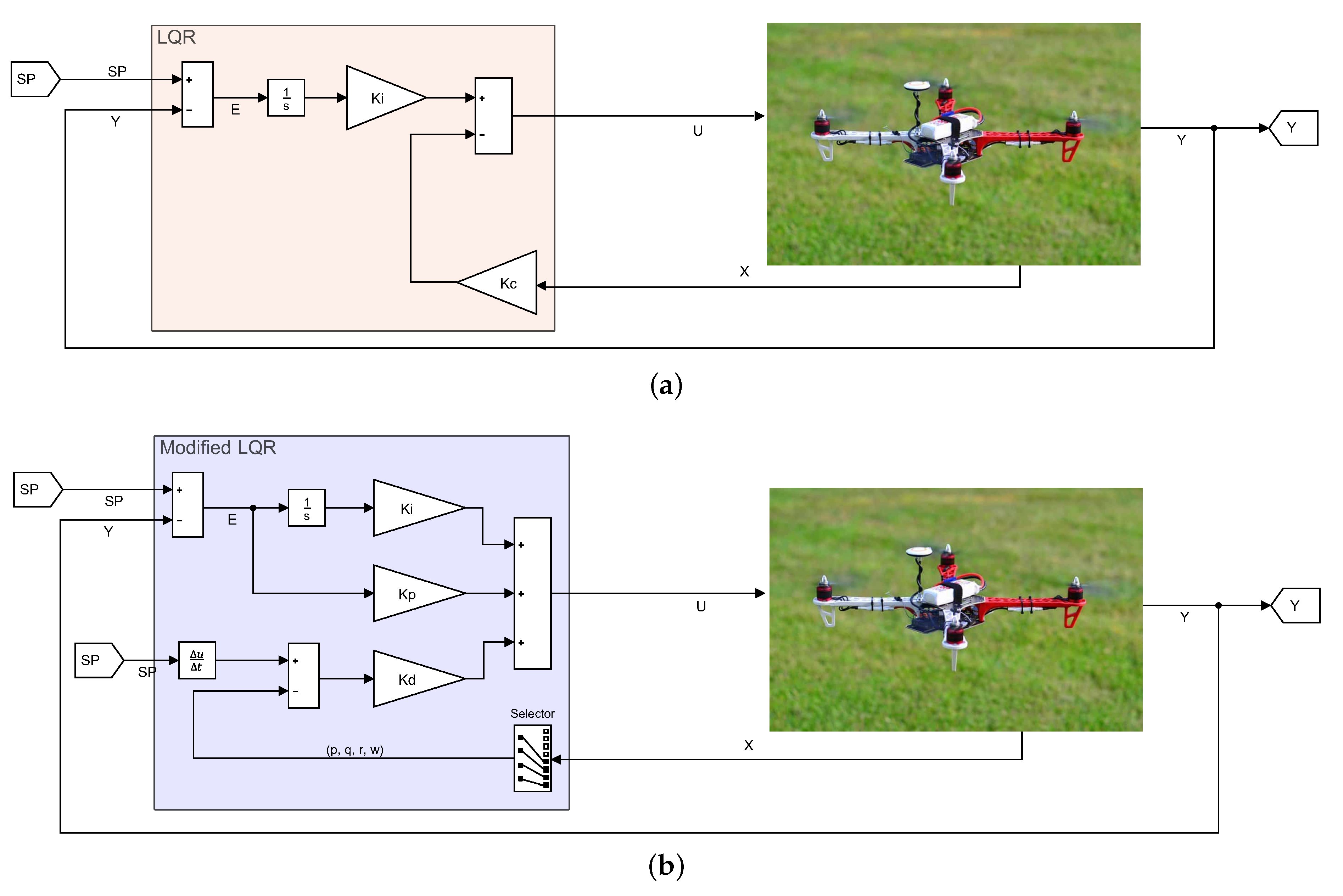
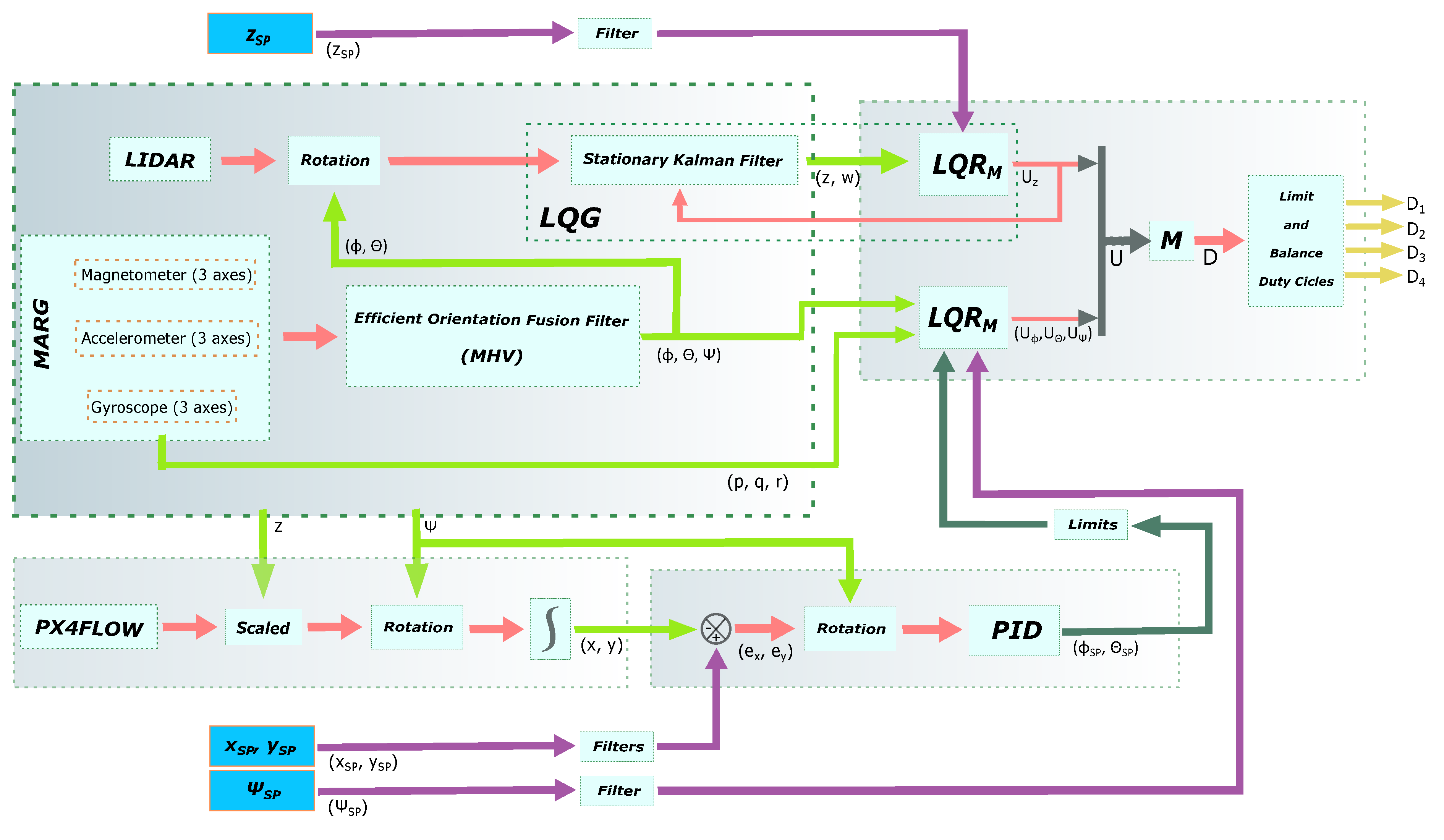
3. Attitude and Altitude Control System
3.1. Pre-Tuning Method for Attitude and Altitude Controller
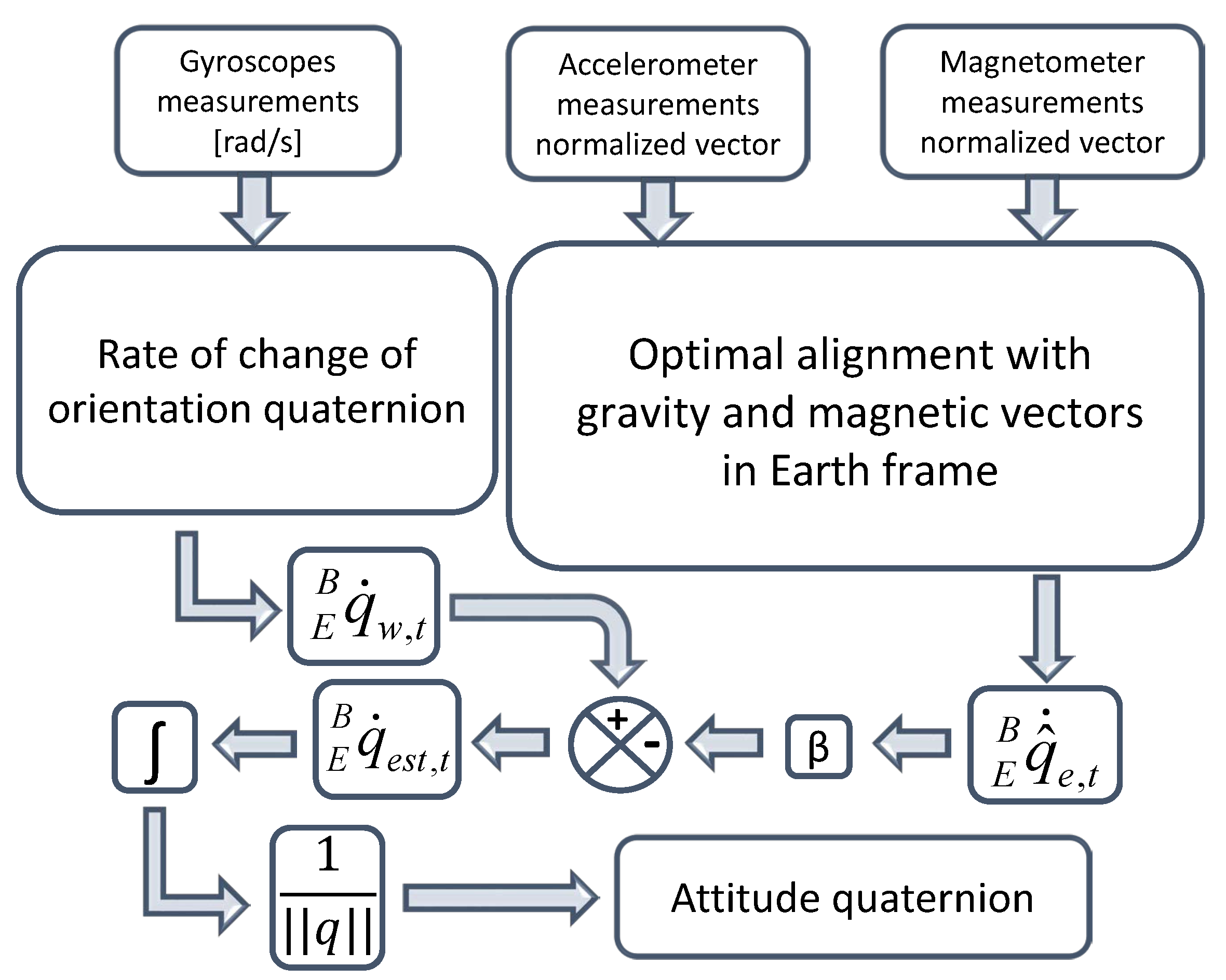
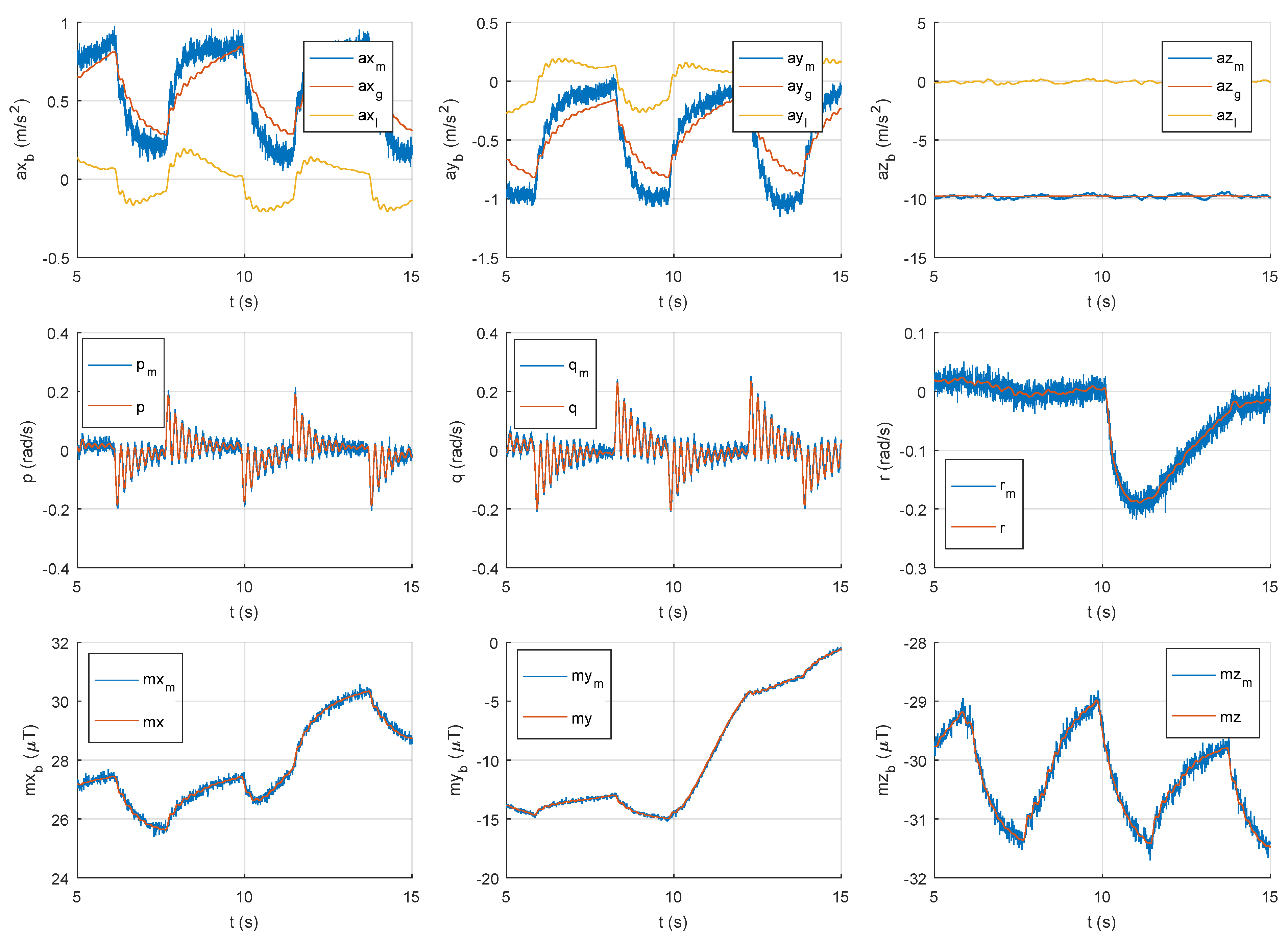
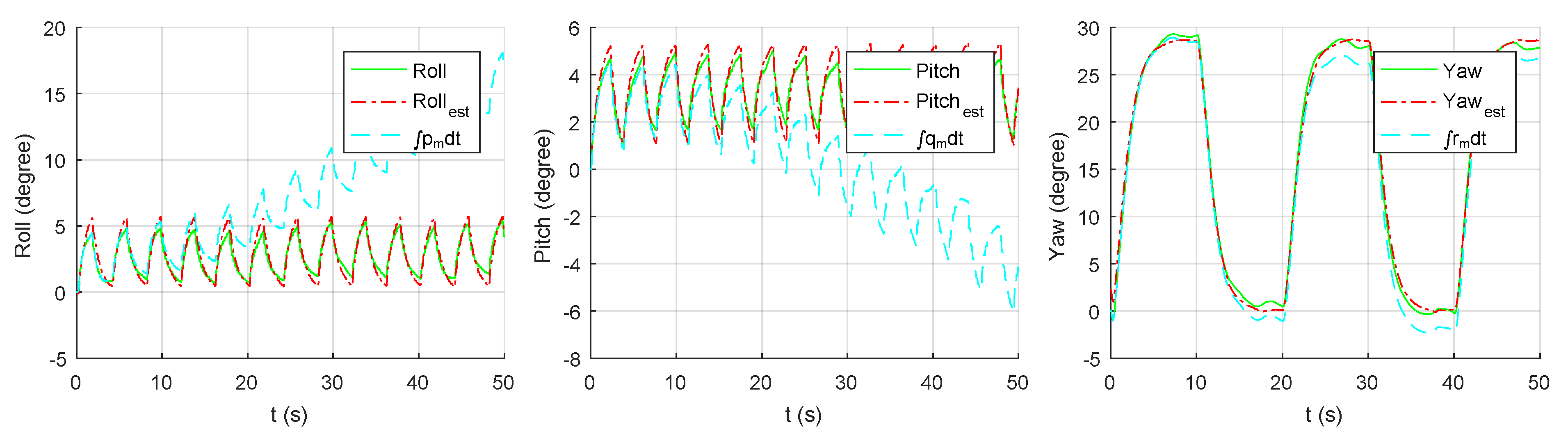
3.2. Attitude Estimation
3.3. Estimation of Linear Velocity and Position in Axis
4. Horizontal Position Controller
Horizontal Position Estimation
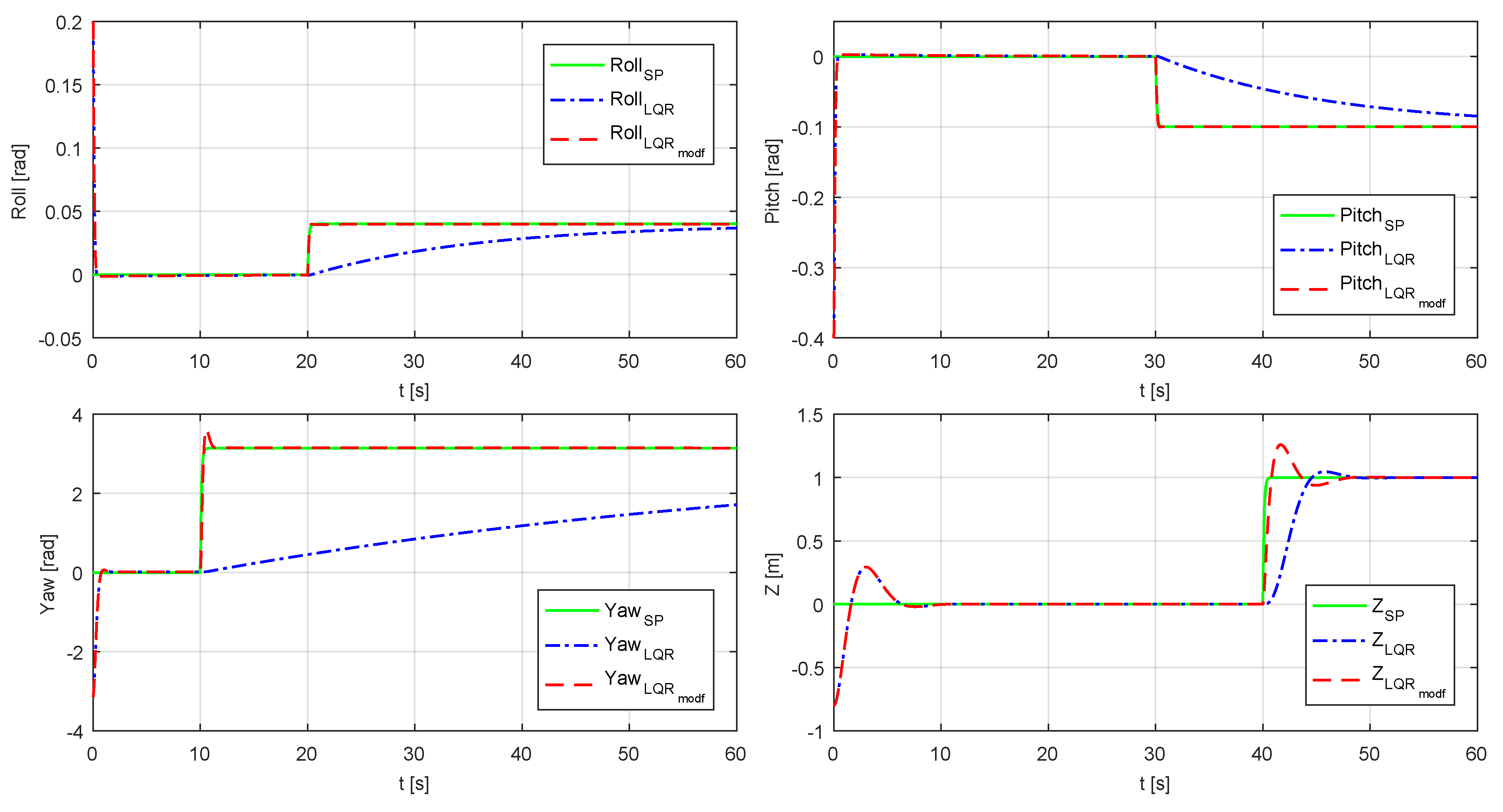
5. Results
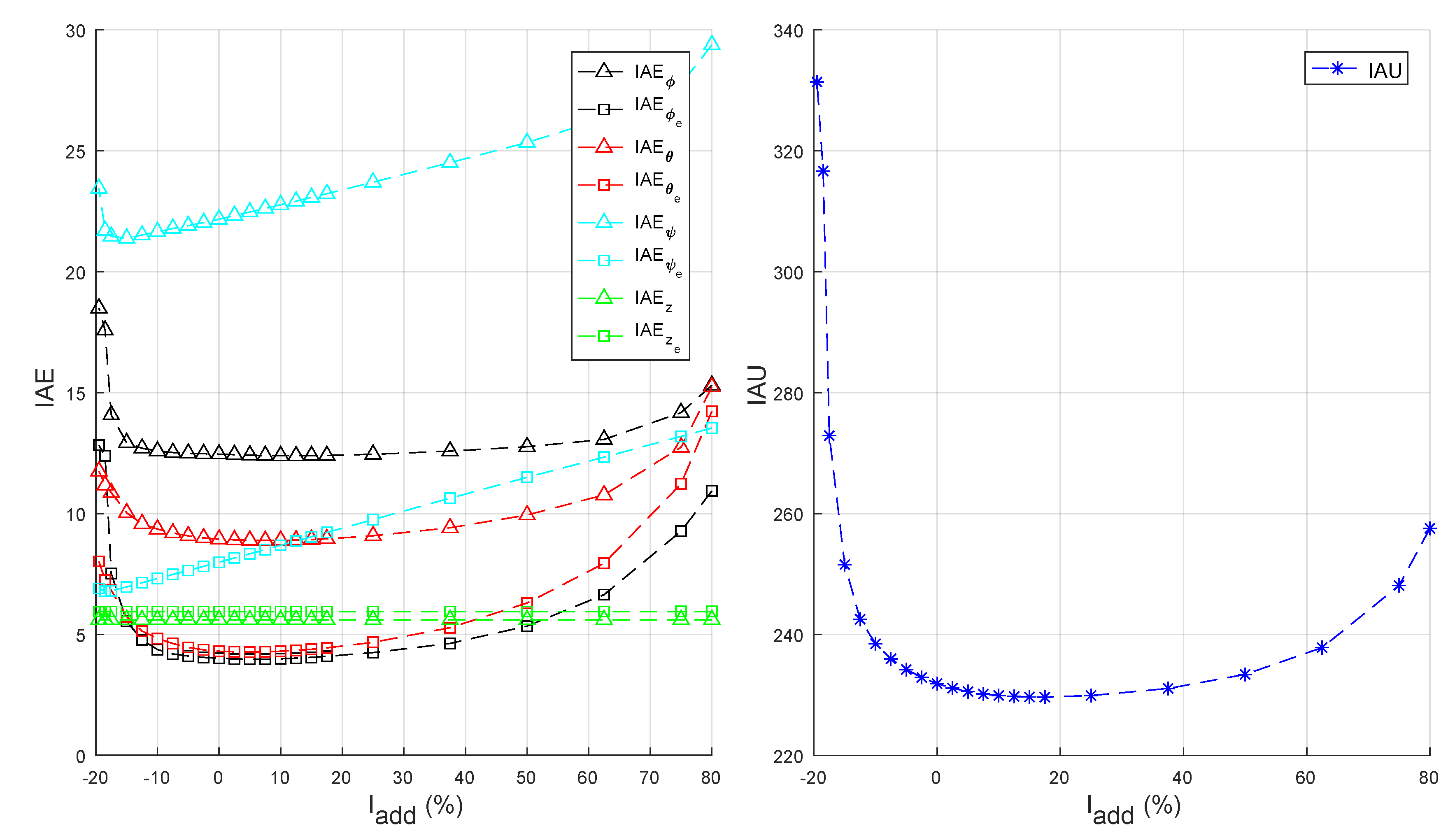
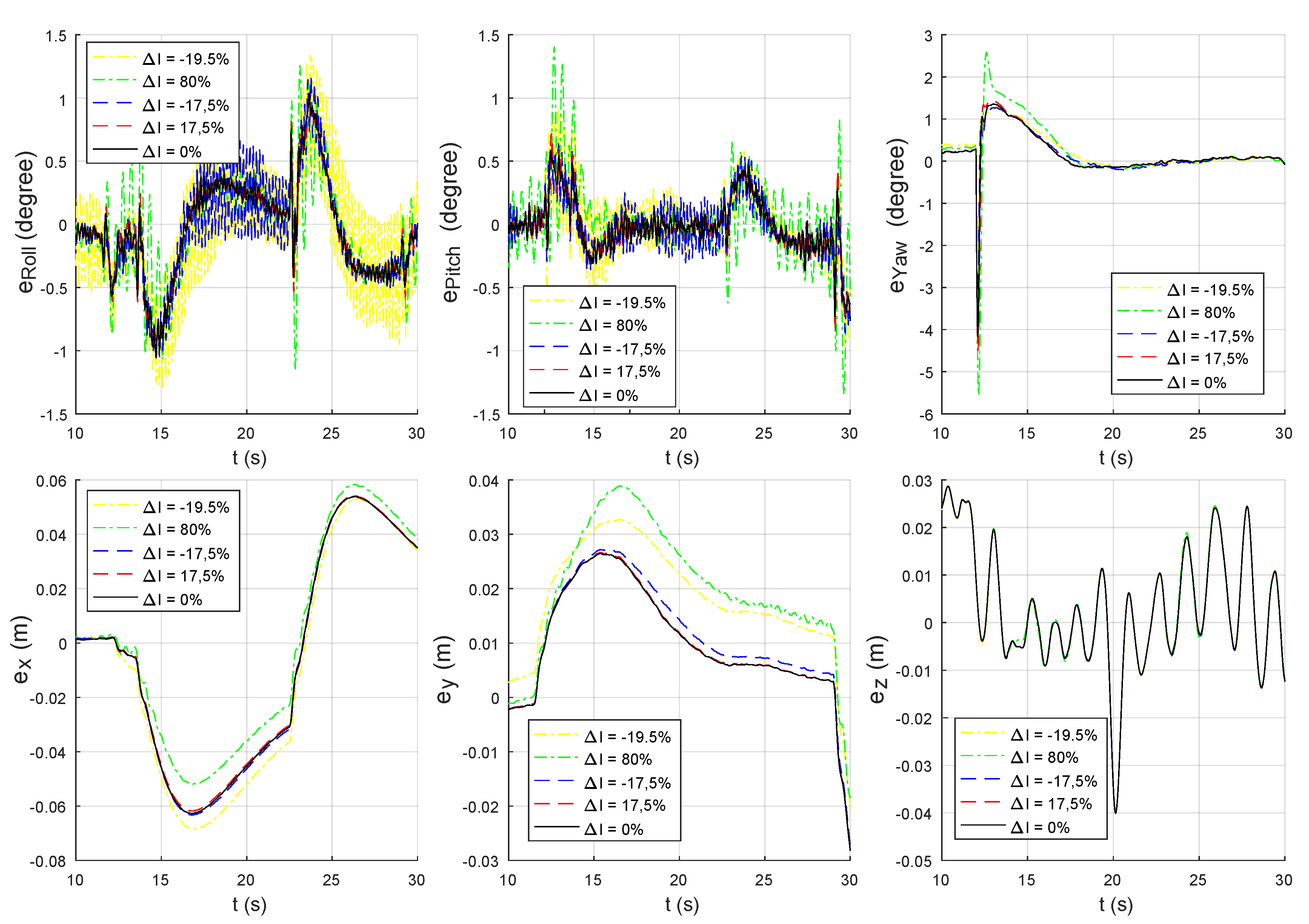
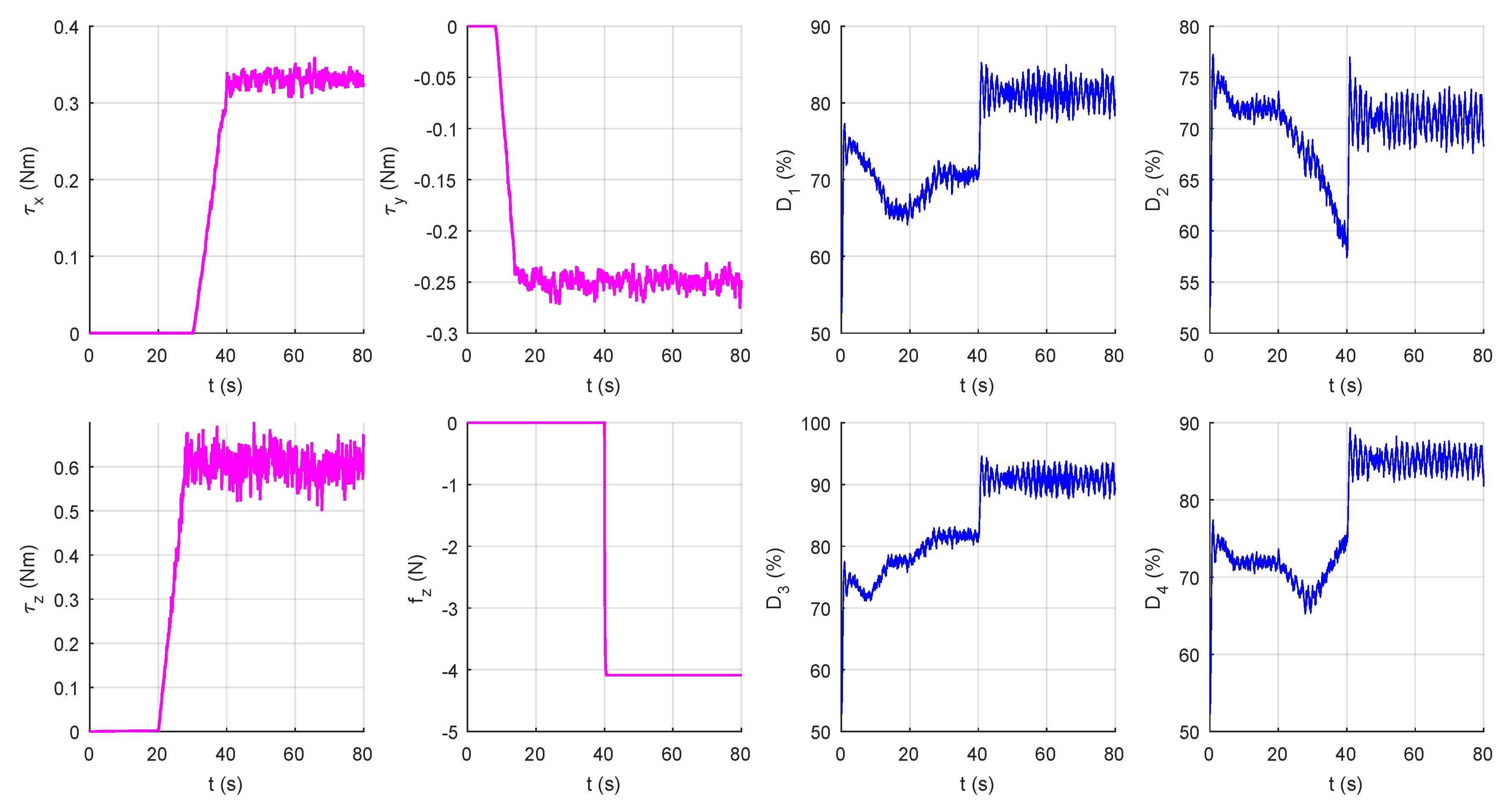
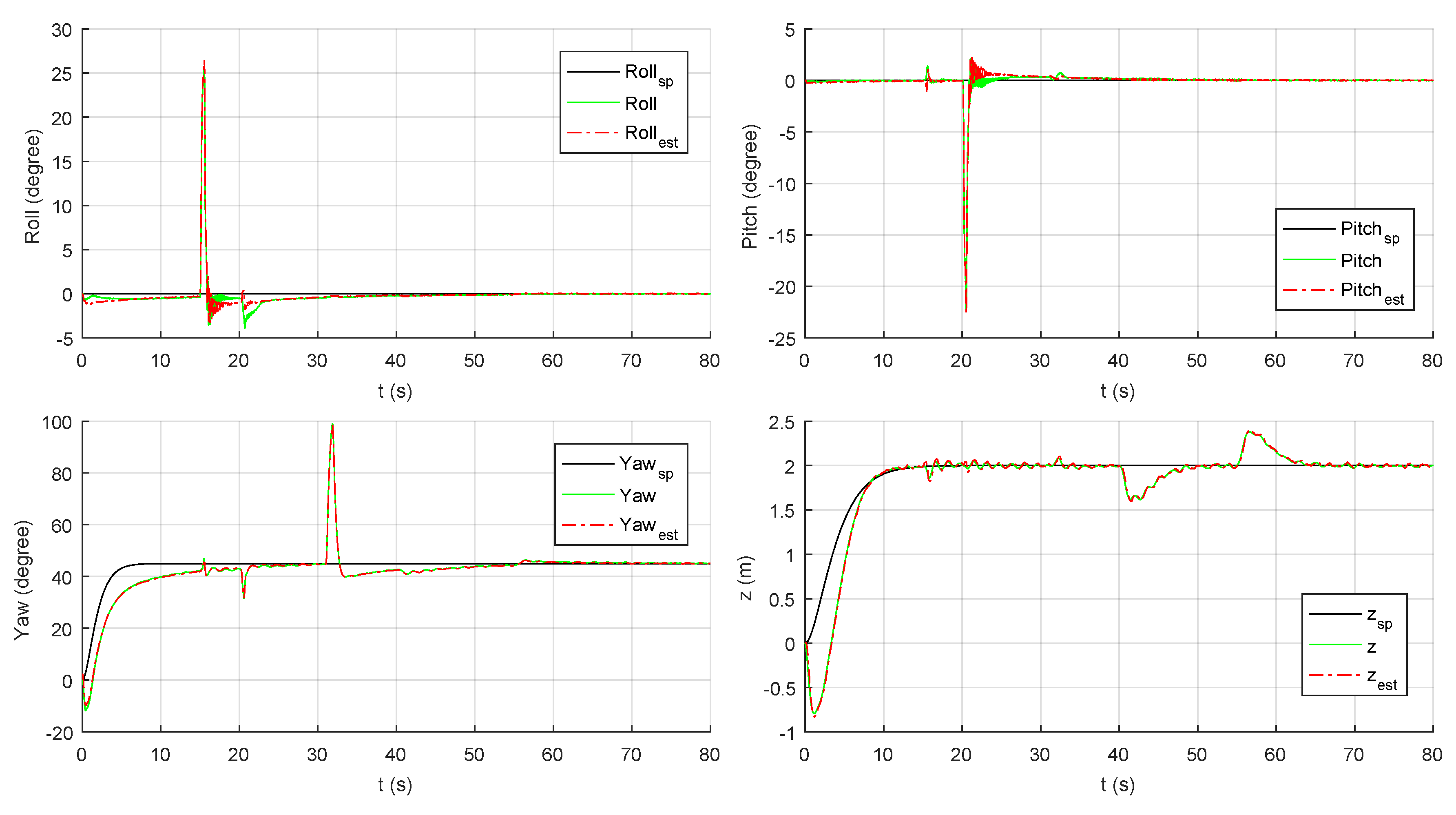
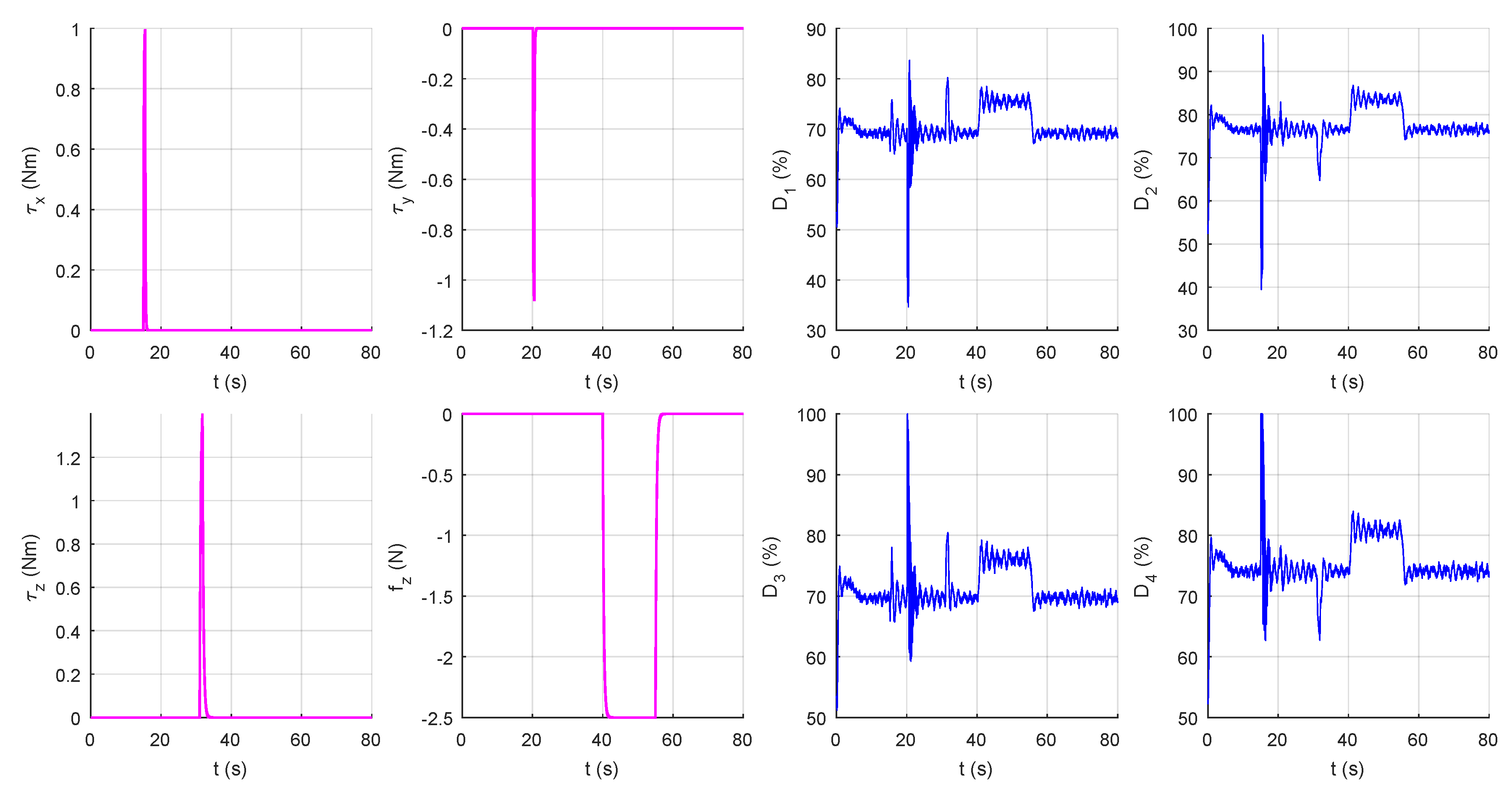
5.1. Robustness Analysis
5.1.1. Parametric Uncertainty Robustness Analysis
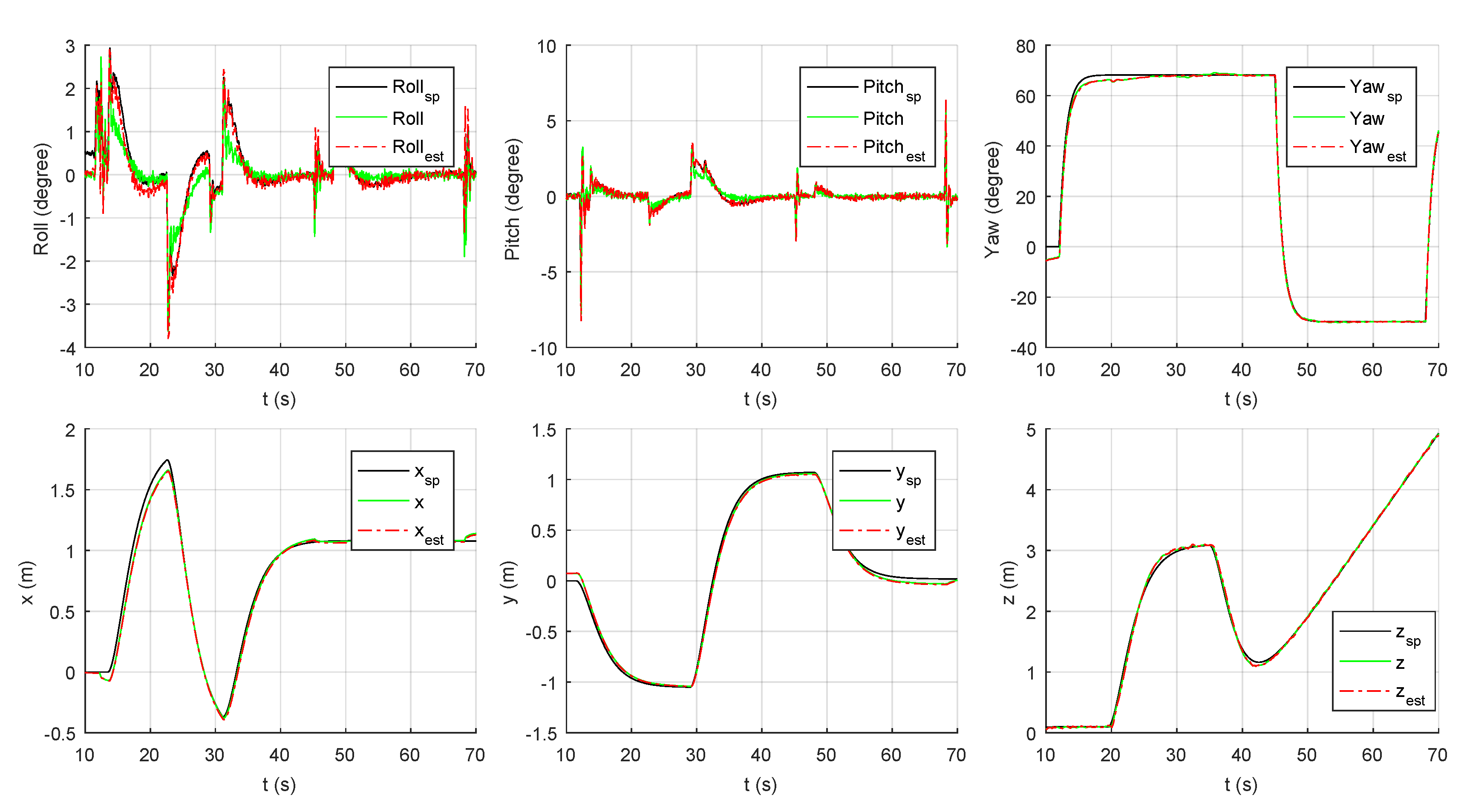
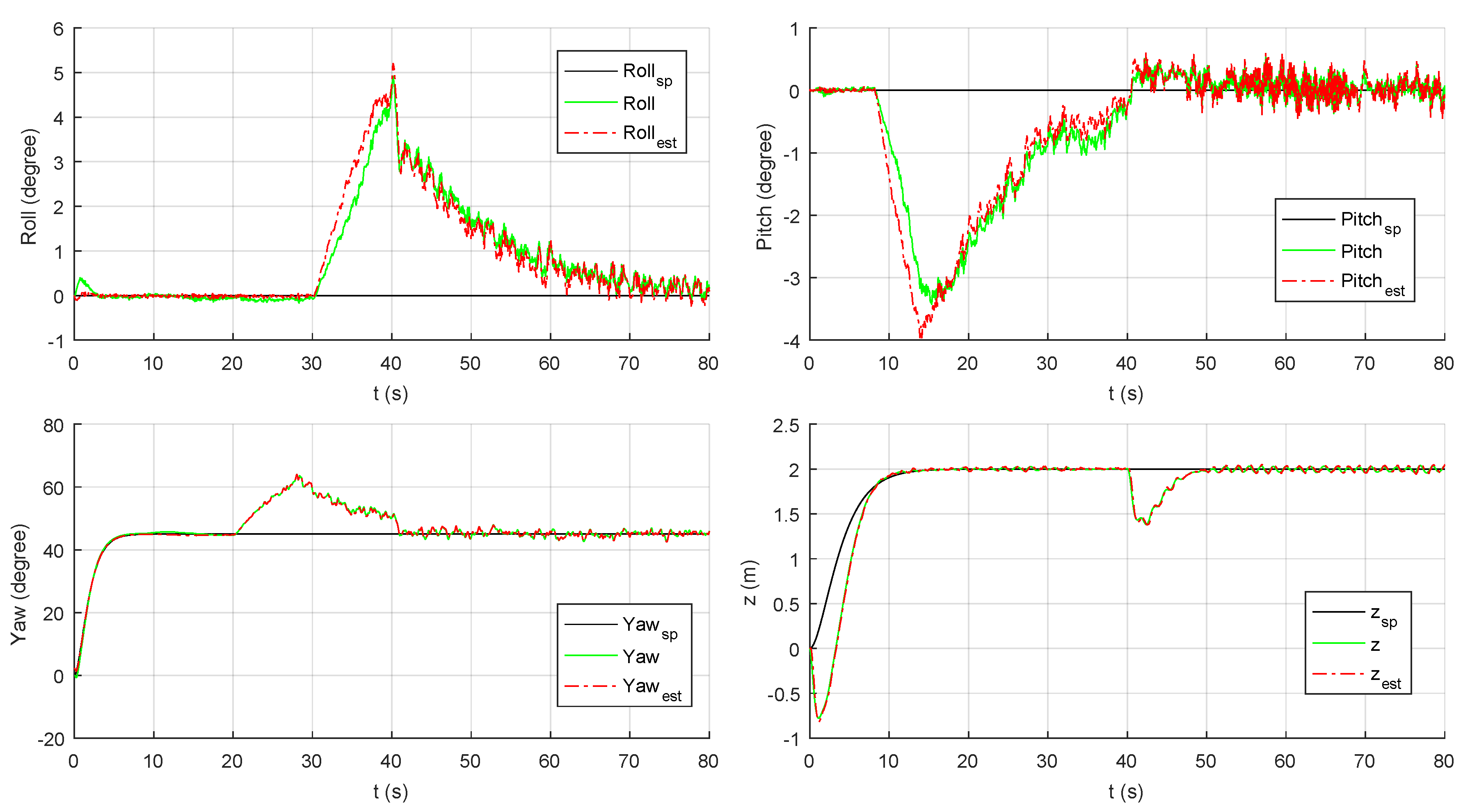
5.1.2. External Disturbance Robustness Analysis
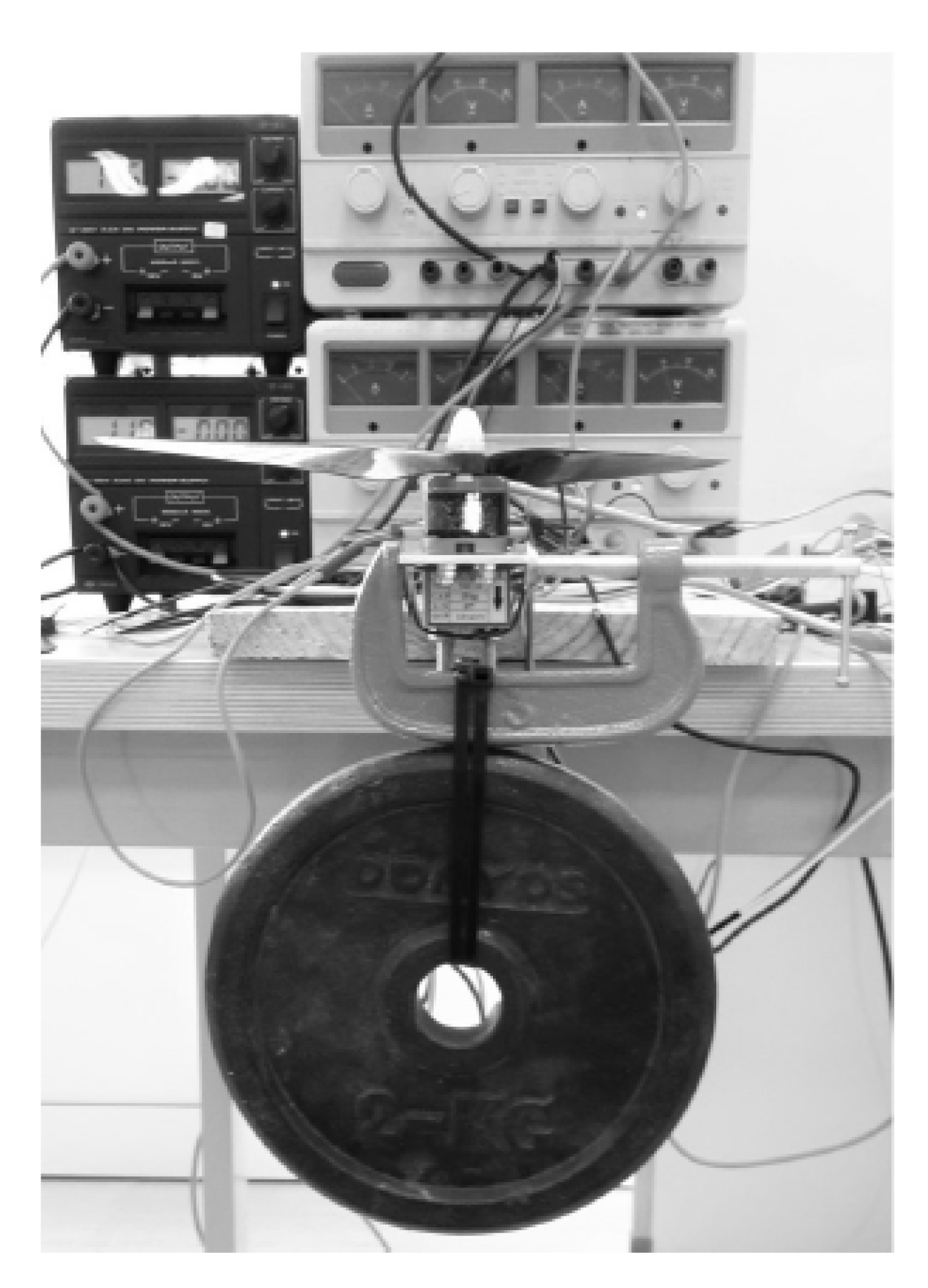
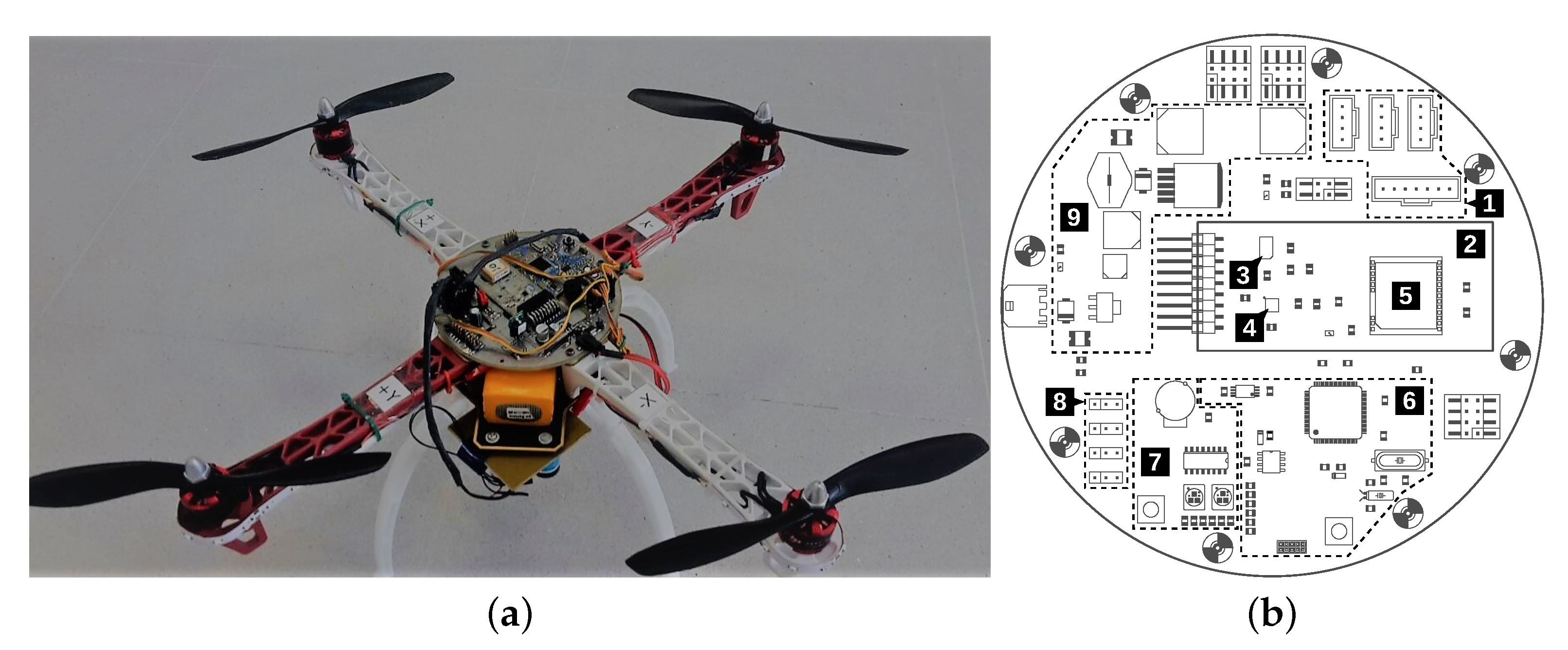
5.2. First Pre-Tuning Tests on the Real System
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Valavanis, K.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles, 1st ed.; Springer: Dordrecht, The Netherlands, 2015; ISBN 978-90-481-9706-4. [Google Scholar]
- Lozano, R. Unmanned Aerial Vehicles: Embedded Control, 1st ed.; Wiley-ISTE: Hoboken, NJ, USA, 2010; ISBN 1848211279. [Google Scholar]
- Nonami, K.; Kendoul, F.; Suzuki, S.; Wang, W.; Nakazawa, D. Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial Vehicles, 1st ed.; Springer: Tokyo, Japan, 2010; ISBN 978-4-431-53855-4. [Google Scholar]
- Mahony, R.; Kumar, V.; Corke, P. Multirotor Aerial Vehicles. IEEE Robot. Autom. Mag. 2012, 19, 20–32. [Google Scholar] [CrossRef]
- Peña, M.; Vivas, C.E.; Rodriguez, C. Modelamiento Dinámico y control LQR de un Quadrotor. AVANCES Investig. Ing. 2010, 13, 71–86. [Google Scholar] [CrossRef][Green Version]
- Li, J.; Li, Y. Dynamic Analysis and PID Control for a Quadrotor. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 573–578. [Google Scholar]
- Xiong, J.; Zheng, E. Optimal Kalman Filter for state estimation of a quadrotor UAV. Opt. Int. J. Light Electron. Opt. 2015, 126, 2862–2868. [Google Scholar] [CrossRef]
- Fernando, H.C.T.E.; De Silva, A.T.A.; De Zoysa, M.D.C.; Dilshan, K.A.D.C.; Munasinghe, S.R. Modelling, Simulation and Implementation of a Quadrotor UAV. In Proceedings of the IEEE 8th International Conference on Industrial and Information Systems, Peradeniya, Sri Lanka, 17–20 December 2013; pp. 207–212. [Google Scholar]
- Lozano, Y.; Gutiérrez, O. Design and Control of a Four-Rotary-Wing Aircraft. IEEE Lat. Am. Trans. 2016, 14, 4433–4438. [Google Scholar] [CrossRef]
- Castillo, P.; Lozano, R.; Dzul, A. Stabilization of a Mini Rotorcraft with Four Rotors. Experimental implementation of linear and nonlinear control laws. IEEE Control Syst. Mag. 2005, 25, 45–55. [Google Scholar] [CrossRef]
- Xiong, J.; Zheng, E. Position and attitude tracking control for a quadrotor UAV. ISA Trans. 2014, 53, 725–731. [Google Scholar] [CrossRef] [PubMed]
- Rubio, J.D.J.; Cruz, J.H.P.; Zamudio, Z.; Salinas, A.J. Comparison of Two Quadrotor Dynamic Models. IEEE Lat. Am. Trans. 2014, 12, 531–537. [Google Scholar] [CrossRef]
- Reinoso, M.; Minchala, L.I.; Ortiz, J.P.; Astudillo, D.; Verdugo, D. Trajectory tracking of a quadrotor using sliding mode control. IEEE Lat. Am. Trans. 2016, 14, 2157–2166. [Google Scholar] [CrossRef]
- Gómez, M.; Pérez, M.; Puentes, C. MÉCANICA DEL VUELO, 2nd ed.; Ibergarceta Publicaciones S.L.: Madrid, Spain, 2012; ISBN 978-84-15452-01-0. [Google Scholar]
- Altug, E.; Ostrowski, J.P.; Mahony, R. Control of a Quadrotor Helicopter Using Visual Feedback. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; pp. 72–77. [Google Scholar]
- Azfar, A.Z.; Hazry, D. A Simple Approach on Implementing IMU Sensor Fusion in PID Controller for Stabilizing Quadrotor Flight Control. In Proceedings of the IEEE 7th International Colloquium on Signal Processing and Its Applications, Penang, Malaysia, 4–6 March 2011; pp. 28–32. [Google Scholar]
- Lee, K.U.; Kim, H.S.; Park, J.B.; Choi, Y.H. Hovering Control of a Quadrotor. In Proceedings of the International Conference on Control, Automation and Systems, JeJu Island, Korea, 17–21 October 2012; pp. 162–167. [Google Scholar]
- Zhih, C.C.; Kumar, S.; Ragavan, V.; Shanmugavel, M. Development of a Simple, Low-cost Autopilot System for Multi-rotor UAVs. In Proceedings of the IEEE Recent Advances in Intelligent Computational Systems, Trivandrum, India, 10–12 December 2015; pp. 285–289. [Google Scholar]
- Tang, Y.; Li, Y.; Ma, T. Design, Implementation and Control of a Small-scale UAV Quadrotor. In Proceedings of the World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; Volume 183, pp. 2364–2369. [Google Scholar]
- Burri, M.; Dätwiler, M.; Achtelik, M.W.; Siegwart, R. Robust State Estimation for Micro Aerial Vehicles Based on System Dynamics. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 5278–5283. [Google Scholar]
- Oh, K.; Ahn, H. Extended Kalman Filter with Multi-frequency Reference Data for Quadrotor Navigation. In Proceedings of the International Conference on Control, Automation and Systems, Busan, Korea, 13–16 October 2015; pp. 201–206. [Google Scholar]
- Kong, X.; Li, J.; Yu, H.; Wu, W. Robust Kalman Filtering for Attitude Estimation Using Low-cost MEMS-based Sensors. In Proceedings of the IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014; pp. 2779–2783. [Google Scholar]
- Gasior, P.; Bondyra, A.; Gardecki, S.; Giernacki, W. Robust estimation algorithm of altitude and vertical velocity for multirotor UAVs. In Proceedings of the 21st International Conference on Methods and Models in Automation and Robotics, Miedzyzdroje, Poland, 29 August–1 September 2016; pp. 714–719. [Google Scholar]
- Abeywardena, D.; Kodagoda, S.; Dissanayake, G.; Munasinghe, R. Improved State Estimation in Quadrotor MAVs. IEEE Robot. Autom. Mag. 2013, 20, 32–39. [Google Scholar] [CrossRef]
- Mahony, R.; Hamel, T.; Pflimlin, J. Nonlinear Complementary Filters on the Special Orthogonal Group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef]
- Almeshal, A.M.; Alenezi, M.R. A Vision-Based Neural Network Controller for the Autonomous Landing of a Quadrotor on Moving Targets. Robotics 2018, 7, 15. [Google Scholar] [CrossRef]
- Raffo, G.V.; Ortega, M.G.; Rubio, F.R. An integral predictive/nonlinear H∞ control structure for a quadrotor helicopter. Automatica 2010, 46, 29–39. [Google Scholar] [CrossRef]
- Lee, K.; Choi, Y.; Park, J. Inverse Optimal Design for Position Control of a Quadrotor. Appl. Sci. 2017, 7, 907. [Google Scholar] [CrossRef]
- Mukhopadhyay, S. PID equivalent of optimal regulator. Electron. Lett. 1978, 14, 821–822. [Google Scholar] [CrossRef]
- Argentim, L.M.; Rezende, W.C.; Santos, P.E.; Aguiar, R.A. PID, LQR and LQR-PID on a Quadcopter Platform. In Proceedings of the International Conference on Informatics, Electronics and Vision, Dhaka, Bangladesh, 17–18 May 2012; pp. 1–6. [Google Scholar]
- Salim, N.D.; Derawi, D.; Shah Abdullah, S.; Mazlan, S.A.; ZamZuri, H. PID plus LQR Attitude Control for Hexarotor MAV in Indoor Environments. In Proceedings of the IEEE International Conference on Industrial Technology, Busan, Korea, 26 February–1 March 2014; pp. 85–90. [Google Scholar]
- Reyes-valeria, E.; Enriquez-caldera, R.; Camacho-lara, S.; Guichard, J. LQR Control for a Quadrotor using Unit Quaternions: Modeling and Simulation. In Proceedings of the 23rd International Conference on Electronics, Communications and Computing, Cholula, Mexico, 11–13 March 2013; pp. 172–178. [Google Scholar]
- Khatoon, S.; Gupta, D.; Das, L.K. PID and LQR Control for a Quadrotor: Modeling and Simulation. In Proceedings of the International Conference on Advances in Computing, Communications and Informatics, New Delhi, India, 24–27 September 2014; pp. 796–802. [Google Scholar]
- Belkheiri, M.; Rabhi, A.; Hajjaji, A.E.L.; Pégard, C.P. Different Linearization Control Techniques for a Quadrotor System. In Proceedings of the CCCA12, Marseilles, France, 6–8 December 2012; pp. 1–6. [Google Scholar]
- Yu, B.; Zhang, Y.; Qu, Y. Fault Tolerant Control Using PID Structured Optimal Technique Against Actuator Faults in a Quadrotor UAV. In Proceedings of the International Conference on Unmanned Aircraft Systems, Orlando, FL, USA, 27–30 May 2014; pp. 167–174. [Google Scholar]
- González-Vázquez, S.; Moreno-Valenzuela, J. A new nonlinear PI/PID controller for quadrotor posture regulation. In Proceedings of the 2010 Electronics, Robotics and Automotive Mechanics Conference (CERMA), Morelos, Mexico, 28 September–1 October 2010; pp. 642–647. [Google Scholar]
- Alcan, G.; Unel, M. Robust hovering control of a quadrotor using acceleration feedback. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1455–1462. [Google Scholar]
- Moreno-Valenzuela, J.; Perez-Alcocer, R.; Guerrero-Medina, M.; Dzul, A. Nonlinear PID-Type Controller for Quadrotor Trajectory Tracking. IEEE/ASME Trans. Mechatron. 2018, 23, 2436–2447. [Google Scholar] [CrossRef]
- Dong, J.; He, B. Novel fuzzy PID-type iterative learning control for quadrotor UAV. Sensors 2019, 19, 24. [Google Scholar] [CrossRef] [PubMed]
- Ogata, K. Ingeniería de Control Modernaê, 5th ed.; PEARSON EDUCACIÓN S.A.: Madrid, Spain, 2010; ISBN 9788483226605. [Google Scholar]
- DJI. Available online: www.dji.com (accessed on 4 May 2015).
- PulsedLight. LIDAR-Lite Operating Manual; Rev 1.0; PulsedLight: Bend, OR, USA, 2 December 2014. [Google Scholar]
- InvenSense. MPU-9250 Product Specification; Rev 1.0; InvenSense: Sunnyvale, CA, USA, 17 January 2014. [Google Scholar]
- InvenSense. Register Map and Descriptions; Rev 1.4; InvenSense: Sunnyvale, CA, USA, 9 September 2013. [Google Scholar]
- Honegger, D.; Meier, L.; Tanskanen, P.; Pollefeys, M. An Open Source and Open Hardware Embedded Metric Optical Flow CMOS Camera for Indoor and Outdoor Applications. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1736–1741. [Google Scholar]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]
- Guardeño, R. Modelado, Simulación, Diseño y Construcción del Sistema de Control de un Quadrotor; Universidad de Cádiz: Cádiz, Spain, 2016. [Google Scholar]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedbaack Control, Analysis and Design, 2nd ed.; John Wiley and Sons: New York, USA, 2005; ISBN 0-470-01168-8. [Google Scholar]
- Rubio, F.R.; López, M.J. Control Adaptativo y Robusto, 1st ed.; Universidad de Sevilla: Sevilla, Spain, 1996; ISBN 84-472-0319-0. [Google Scholar]
- Alam, F.; Zhaihe, Z.; Jiajia, H. A Comparative Analysis of Orientation Estimation Filters using MEMS based IMU. In Proceedings of the International Conference on Research in Science, Engineering and Technology, Dubai, UAE, 21–22 March 2014; pp. 86–91. [Google Scholar]
- Cavallo, A.; Cirillo, A.; Cirillo, P.; De Maria, G.; Falco, P.; Natale, C.; Pirozzi, S. Experimental comparison of sensor fusion algorithms for attitude estimation. In IFAC Proceedings Volumes (IFAC-PapersOnline); IFAC: Cape Town, South Africa, 2014; Volume 19, pp. 7585–7591. [Google Scholar]
- Guardeño, R.; López, M.J.; Sánchez, V.M. Available online: https://youtu.be/rRv-dkYR6Ro (accessed on 22 December 2018).

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simbol | Description | Value |
|---|---|---|
| Aerodynamic drag coefficient using a reference area perpendicular to x axis | 0.01212 Kg/m | |
| Aerodynamic drag coefficient using a reference area perpendicular to y axis | 0.01212 Kg/m | |
| Aerodynamic drag coefficient using a reference area perpendicular to z axis | 0.0648 Kg/m | |
| Thrust—RPM quadratic relation | N/RPM2 | |
| Thrust—RPM gain | N/RPM | |
| Torque—RPM quadratic relation | N m/RPM2 | |
| Thrust—Duty cycle gain | 0.0667 N/% | |
| l | Distance from the center of one motor to the center of gravity of the system | 0.235 m |
| m | System mass | 1.250 Kg |
| Moment of inertia about x axis | 0.0094 Kg m2 | |
| Moment of inertia about y axis | 0.01 Kg m2 | |
| Moment of inertia about z axis | 0.0187 Kg m2 | |
| g | Gravitational acceleration | 9.81 m/s2 |
| Parameter | EKF | MHV | NLCF |
|---|---|---|---|
| RMSE Roll [] | 4.71 | 4.85 | 5.07 |
| RMSE Pitch [] | 1.91 | 2.65 | 2.89 |
| RMSE Yaw [] | 5.19 | 5.13 | 5.67 |
| Compute time [ms] | 2.7 | 0.15 | 0.11 |
| −0.050 | −0.0025 | −0.08 | 1 | |
| 0.050 | 0.0025 | 0.08 | 1 |
| 80.0 | 1.0786 | 1.2454 | 5.6103 | 15.2990 | 15.2290 | 29.3750 | 257.5400 |
| 75.0 | 1.0408 | 1.1395 | 5.6099 | 14.1720 | 12.7410 | 27.7470 | 248.1000 |
| 62.5 | 1.0648 | 1.0532 | 5.6083 | 13.0620 | 10.768 | 26.3290 | 237.8200 |
| 50.0 | 1.1173 | 1.0406 | 5.6071 | 12.7620 | 9.9366 | 25.3390 | 233.3900 |
| 37.5 | 1.1384 | 1.0341 | 5.6064 | 12.5770 | 9.4105 | 24.5050 | 231.0600 |
| 25.0 | 1.1418 | 1.0277 | 5.6062 | 12.4480 | 9.0783 | 23.6990 | 229.8900 |
| 17.5 | 1.1443 | 1.0261 | 5.6061 | 12.4010 | 8.9529 | 23.2200 | 229.6400 |
| 15.0 | 1.1455 | 1.0261 | 5.6060 | 12.3910 | 8.9241 | 23.0640 | 229.6500 |
| 12.5 | 1.1467 | 1.0263 | 5.6060 | 12.3860 | 8.9038 | 22.9140 | 229.7400 |
| 10.0 | 1.1477 | 1.0266 | 5.6060 | 12.3870 | 8.8905 | 22.7650 | 229.9000 |
| 7.5 | 1.1494 | 1.0268 | 5.6060 | 12.3970 | 8.8854 | 22.6150 | 230.1600 |
| 5.0 | 1.1515 | 1.0272 | 5.6060 | 12.4110 | 8.8917 | 22.4660 | 230.5500 |
| 2.5 | 1.1532 | 1.0273 | 5.6059 | 12.4320 | 8.9092 | 22.3200 | 231.1000 |
| 0 | 1.1552 | 1.0271 | 5.6059 | 12.4540 | 8.9375 | 22.1670 | 231.8700 |
| −2.5 | 1.1571 | 1.0266 | 5.6059 | 12.4720 | 8.9901 | 22.0250 | 232.8800 |
| −5.0 | 1.1588 | 1.0262 | 5.6059 | 12.4890 | 9.0719 | 21.9010 | 234.2100 |
| −7.5 | 1.1609 | 1.0273 | 5.6060 | 12.5200 | 9.1945 | 21.7840 | 235.9800 |
| −10.0 | 1.1643 | 1.0295 | 5.6060 | 12.5830 | 9.3560 | 21.6470 | 238.4800 |
| −12.5 | 1.1665 | 1.0339 | 5.6060 | 12.6990 | 9.5755 | 21.5120 | 242.5300 |
| −15.0 | 1.1725 | 1.0484 | 5.6059 | 12.9250 | 10.0260 | 21.3830 | 251.5600 |
| −17.5 | 1.1947 | 1.0800 | 5.6062 | 14.0740 | 10.8630 | 21.4570 | 272.8800 |
| −18.5 | 1.2149 | 1.0928 | 5.6085 | 17.5760 | 11.1710 | 21.7040 | 316.6300 |
| −19.5 | 1.1920 | 1.1332 | 5.6043 | 18.4920 | 11.7490 | 23.4380 | 331.3600 |
| 80.0 | 1.0540 | 1.1516 | 5.9497 | 10.9330 | 14.2230 | 13.5330 |
| 75.0 | 1.0362 | 1.1035 | 5.9494 | 9.2675 | 11.2260 | 13.1880 |
| 62.5 | 1.0460 | 1.0832 | 5.9476 | 6.6436 | 7.9389 | 12.3290 |
| 50.0 | 1.0567 | 1.0789 | 5.9458 | 5.3444 | 6.2991 | 11.4950 |
| 37.5 | 1.0709 | 1.0779 | 5.9448 | 4.6290 | 5.2787 | 10.6320 |
| 25.0 | 1.0793 | 1.0743 | 5.9443 | 4.2501 | 4.6732 | 9.7469 |
| 17.5 | 1.0849 | 1.0738 | 5.9441 | 4.0947 | 4.4447 | 9.2150 |
| 15.0 | 1.0871 | 1.0741 | 5.9441 | 4.0536 | 4.3870 | 9.0385 |
| 12.5 | 1.0895 | 1.0746 | 5.9440 | 4.0185 | 4.3410 | 8.8624 |
| 10.0 | 1.0919 | 1.0751 | 5.9440 | 3.9911 | 4.3064 | 8.6862 |
| 7.5 | 1.0941 | 1.0754 | 5.9440 | 3.9774 | 4.2820 | 8.5101 |
| 5.0 | 1.0962 | 1.0759 | 5.9440 | 3.9762 | 4.2724 | 8.3350 |
| 2.5 | 1.0982 | 1.0765 | 5.9439 | 3.9865 | 4.2806 | 8.1609 |
| 0 | 1.0995 | 1.0771 | 5.9440 | 4.0120 | 4.3068 | 7.9877 |
| −2.5 | 1.1007 | 1.0777 | 5.9440 | 4.0513 | 4.3638 | 7.8161 |
| −5.0 | 1.1026 | 1.0786 | 5.9440 | 4.1067 | 4.4628 | 7.6468 |
| −7.5 | 1.1055 | 1.0806 | 5.9440 | 4.1940 | 4.6223 | 7.4801 |
| −10.0 | 1.1090 | 1.0824 | 5.9440 | 4.3763 | 4.8359 | 7.3095 |
| −12.5 | 1.1134 | 1.0851 | 5.9442 | 4.7788 | 5.1354 | 7.1386 |
| −15.0 | 1.1184 | 1.0927 | 5.9441 | 5.5396 | 5.7354 | 6.9640 |
| −17.5 | 1.1398 | 1.1083 | 5.9445 | 7.5210 | 6.8205 | 6.8099 |
| −18.5 | 1.1800 | 1.1204 | 5.9470 | 12.3800 | 7.2495 | 6.7940 |
| −19.5 | 1.2078 | 1.2035 | 5.9431 | 12.8240 | 8.0231 | 6.8986 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guardeño, R.; López, M.J.; Sánchez, V.M. MIMO PID Controller Tuning Method for Quadrotor Based on LQR/LQG Theory. Robotics 2019, 8, 36. https://doi.org/10.3390/robotics8020036
Guardeño R, López MJ, Sánchez VM. MIMO PID Controller Tuning Method for Quadrotor Based on LQR/LQG Theory. Robotics. 2019; 8(2):36. https://doi.org/10.3390/robotics8020036
Chicago/Turabian StyleGuardeño, Rafael, Manuel J. López, and Víctor M. Sánchez. 2019. "MIMO PID Controller Tuning Method for Quadrotor Based on LQR/LQG Theory" Robotics 8, no. 2: 36. https://doi.org/10.3390/robotics8020036
APA StyleGuardeño, R., López, M. J., & Sánchez, V. M. (2019). MIMO PID Controller Tuning Method for Quadrotor Based on LQR/LQG Theory. Robotics, 8(2), 36. https://doi.org/10.3390/robotics8020036