2. Related Work
A VANET communication architecture consists of multiple layers, including application, security services, network, MAC, and physical layers. For cooperative collision avoidance, the application layer performs nodes’ clustering, predicts possible collisions, and specifies preventive measures. Warning messages are generated at this layer to intimate other nodes regarding hazardous events and transmitted by employing the services of the lower layers [
19]. Secure transmission of warning messages remains critical [
20], as malicious activities performed on warning messages may cause collisions at a large scale. The security services layer is responsible for ensuring the security. Since in-time and reliable delivery of these time-sensitive messages also remains important, the network layer routes warning messages to destination nodes on optimal paths to reduce transmission delays and packet losses. MAC layer seeks to enhance the utilization of shared channels and physical layer puts bits on the communication media for transmission. Since each layer has its own significance, effective collision avoidance does not remain restricted to a single layer and, hence, is a cross-layer issue [
21]. This section reviews eminent VANET architectures in the existing literature.
IEEE standardized 1609 protocol stack, namely, Wireless Access in Vehicular Environment (WAVE), provides a layered architecture for handling diverse issues related to all VANET communication layers. The protocol suite includes 1609.1 through 1609.6 standards for the application layer through physical layer. WAVE has two modes, namely, safety and non-safety modes and it uses dedicated 5.9 GHz frequency band for communication [
22]. Continuous Air Interface for Long to Medium Range (CALM) [
23] is the International Standards Organization (ISO) proposal for continuous inter-node communication in VANETs through V2V as well as V2I models. The concept aims at establishing communication among different kinds of devices, such as On-Board Units (OBUs) and Road Side Units (RSUs). CALM interface manager, CALM network manager, and CALM application manager constitute the management entity in CALM. Car-to-Car Communication Consortium (C2C-CC) [
24] enables V2V and V2I communications. C2C-CC architecture introduces a C2CNet protocol at network layer that supports both safety and non-safety applications in a multi-hop network.
The work in [
25] proposes a heterogeneous communication architecture for VANETs, where a node can connect through WiFi, WAVE, or a Fourth Generation (4G) Long Term Evolution (LTE) interface. The interfaces can be switched to achieve the best services at a particular time. The authors in [
26] propose a secure distributed VANET architecture to build an efficient cloud that can be exploited to provide different services, such as parking area management, collision avoidance, traffic congestion avoidance, etc. A similar secure architecture is proposed in [
27]. The work in [
28] proposes a two-tier VANET architecture, called Mobile Infrastructure based VANET Architecture for Urban Environment (MI-VANET). This architecture takes buses as backbone on the first tier for messages transmission, whereas the ordinary nodes constitute the second tier. Mobile Infrastructure Registering (MIRG) and Mobile Infrastructure Routing (MIRT) algorithms perform nodes registration and buses density computation, respectively.
The authors in [
29] propose a three-tier secure Internet of Vehicle (IoV) architecture that employs Reputation-Based Vehicle-Assisted Communication (RVAC) where the central authority lies on the first tier to perform the verification of nodes. RSUs remain on the second tier that enable V2I communication among nodes on the third tier. The authors in [
30] propose a Situation-Aware Trust (SAT) architecture. SAT comprises three major components for enabling efficient and reliable inter-node communication. The components include (1) an attributes oriented control policy, (2) a proactive model to enable trust among nodes, and (3) an email enabled network. The authors in [
31] propose a cross-layer architecture, which segments the road and distributes the service channels among the segments for load balancing. The proposed architecture also prevents broadcast floods. The work in [
32] introduces a hybrid architecture, which includes a novel concept of routing module integration layer. The proposed architecture employs two-tier routing module selection mechanism for enhanced message delivery.
The authors in [
33] propose a new cloud-based architecture for VANETs, which is composed of two components, namely Vehicular Cloud Computing (VCC) and Information Centric Network (ICN). VCC helps to create a vehicular cloud for information, whereas ICN enables efficient communication of nodes with the cloud. Similar cloud-based VANET architectures are proposed in [
34,
35]. The work in [
36] proposes a VANET architecture that analyzes the information gathered from different layers to predict congestion. The authors in [
37] propose another hybrid architecture, which combines the standard IEEE 802.11p with 4G LTE to enable efficient and reliable delivery of warning messages. The authors in [
38] propose a Software Defined Network (SDN) based VANET architecture to enable geo-broadcasting. This architecture employs the standard OpenFlow protocol and enables application customization by network operators. However, since collection of all the intelligence on a single centralized controller is not a good approach, the authors in [
39] propose a decentralized SDN-based architecture for VANETs.
From the review of the existing VANET communication architectures, it is found that the existing literature lacks a dedicated direction-aware communication architecture to minimize collisions on bi-directional highways. Moreover, since the existing architectures do not take the direction component into consideration, this adversely impacts the collision prediction process. Furthermore, the existing architectures rely upon fixed deceleration as a preventive measure. Additionally, the existing architectures ensure message authentication but fail to provide warning messages confidentiality. Moreover, the existing architectures, for not being direction-aware, fail to cater for the frequent topological changes on bi-directional highways, which remains critical during warning messages dissemination. Finally, un-prioritized delivery of warning message is yet another critical limitation of the existing VANET communication architectures. To address these issues, we propose a novel cross-layer V2V architecture, which is detailed in the following section.
3. Direction-Aware Vehicular Collision Avoidance (DVCA) Architecture
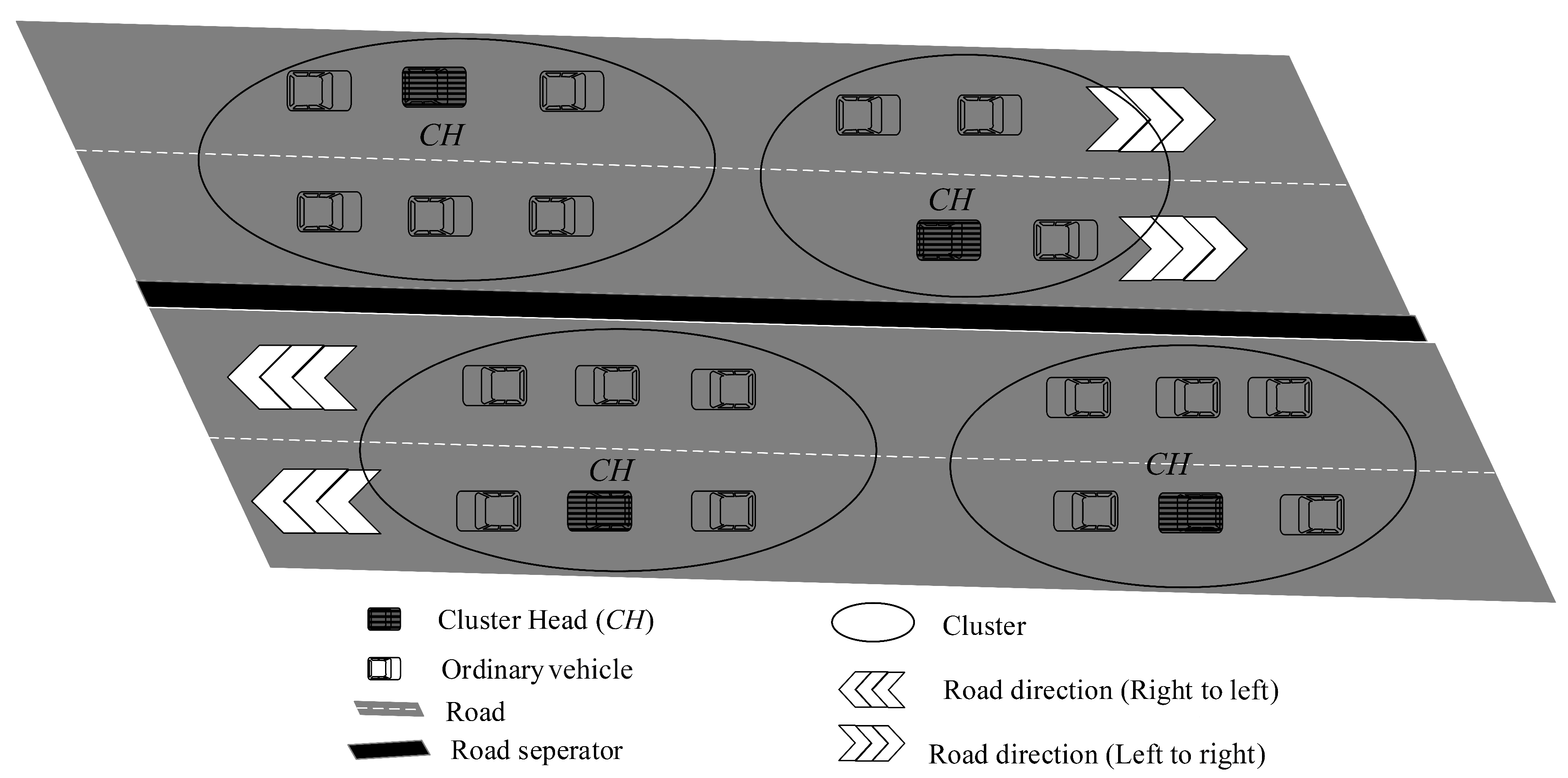
This section presents the proposed DVCA architecture using V2V communications for bi-directional highways, as depicted in
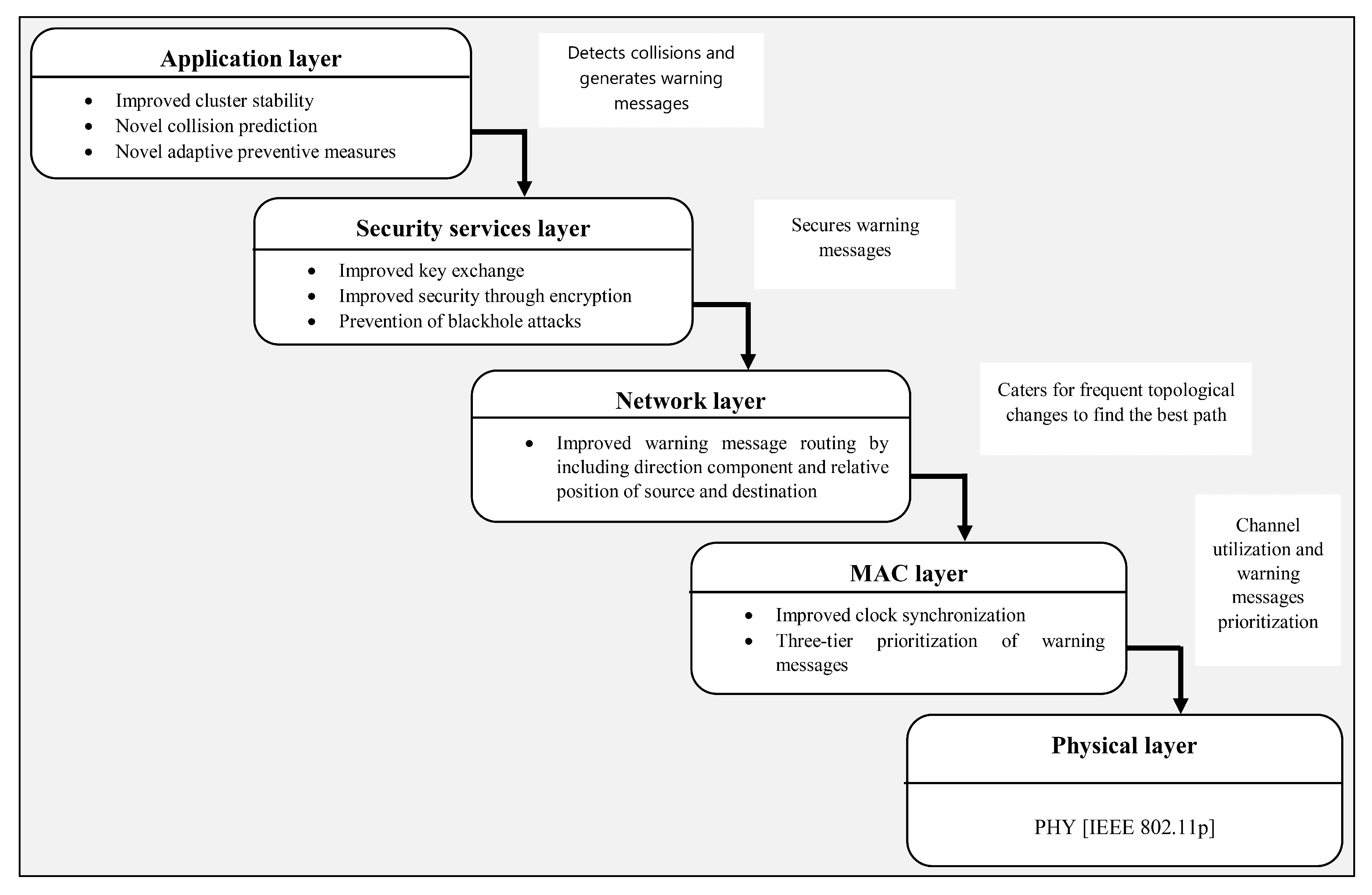
Figure 2. DVCA comprises a protocol suite consisting of application, security services, network, MAC and physical layers, as shown in
Figure 1.
Figure 3 depicts the layer-wise attributes of the proposed DVCA architecture. The working of each layer of the proposed architecture is described in the following subsections.
Table 1 lists the notations used in this paper.
3.1. DVCA Application Layer
The application layer of DVCA implements our direction-aware CCA application [
15] to identify possible collisions among nodes on bi-directional highways and specify preventive measures. DVCA starts with nodes’ clustering using our variant of the
k-medoids clustering algorithm, proposed in [
15], which provides improved cluster stability with minimal clustering overhead in a V2V environment. Cluster stability is achieved by employing the direction component, besides using relative distances among nodes, during the clustering process, as [
15]
Here,
is the final distance between a node
n and the
, and
represents the Hamming distance between them. The next step computes the probability of collision among nodes based on the nodes’ expected states. The expected state of a node is predicted as [
15]
Here,
and
are the expected and current states of a node, respectively,
represents the current speed of the node,
is the next time step, and
represents the acceleration or deceleration attained. By taking into account the expected states of nodes, DVCA is able to extend the time for nodes to react to hazardous events, thereby, providing effective means to reduce collisions [
15]. Moreover, a warning message is generated only if the probability of collision (
), computed using Equation (
3) [
15], exceeds a predefined threshold that seeks to reduce the communication overhead.
Here, and represent the speed of front and rear nodes, respectively, and and are the minimum and maximum scores evaluated from the fraction , respectively.
Since preventive measures are also specified at the application layer, DVCA computes safe speeds (
) using Equation (
4) by employing our adaptive deceleration technique, called the Benign factor (
) [
15], which ranges from 0 to 1.
Thus, deceleration does not remain constant in all scenarios in DVCA, rather it varies in different situations. The estimated collision probability along with the safe speed constitutes a warning message, which is passed to the security services layer before dissemination to the target node.
3.2. DVCA Security Services Layer
A warning message, intended to alert a target node to slow down to avoid a possible collision, may be intercepted by a malicious node that can discard the message or modify it to cause a collision. Overcoming such critical situations demands secure transmission of warning messages, which is the responsibility of the security services layer. To this end, DVCA provides enhanced nodes’ privacy preservation and messages authentication. Reliable and fast key exchange among nodes is one of the biggest issues in VANETs, which is achieved by using our variant of the Diffie–Hellman key exchange algorithm, proposed in [
16], as follows.
:
⟵ P ⊙ SID
sends () to
:
⟵ P ⊙ SID
sends () to
:
generates
⟵ ⊙ SID
:
generates
⟵ ⊙ SID
Here, P represents the public key, SID is the secret identity of a node, and is the unique symmetric key exchanged through the aforementioned process.
After the keys are successfully exchanged, DVCA encrypts the warning message by using our light-weight encryption algorithm [
16], which secures warning messages from intruders. The warning messages are encrypted as below.
Random generation of 1 × 4 matrix, Y
For j = 1 To 4
Switch(Y(j))
Case: 1
For x = 1 To size(W) - 1
W(x) ⟵ W(x) ⊕ W(x+1)
End For
W ⟵ W ⊕
Case: 2
W ⟵ Circular-shift(W, )
Case: 3
Generate the random vector,
W ⟵ W ⊕
Case: 4
Byte-wise substitution operation
End Switch
End For
DVCA then generates the authentication hash as follows, which is appended to the warning message
obtained from the aforementioned encryption process,
Here,
represents the authentication hash generated at a source node and
is the public identity of a node, which is used for communication with other nodes. A predefined threshold, which indicates the time to retransmit warning messages if no acknowledgments are received by the source nodes, is maintained to avoid blackhole attacks. The retransmission occurs through an alternative path and the corresponding CH notifies the previous path as suspicious of malicious activities. On successful encryption of the warning message, the cipher text is handed over to the network layer so that it can be routed to the destination node.
3.3. DVCA Network Layer
The responsibility of the network layer is to enable timely and reliable transmission of warning messages [
40]. VANETs experience frequent topology changes due to high speed nodes on bi-directional highways. This results in frequent path reconstruction processes, as nodes frequently enter and exit the communication range of each other. To encounter such changes, DVCA introduces two additional parameters besides the distance parameter. These parameters include the direction component and the relative position of the source and destination nodes, which help to find the most suitable path among the available set of paths [
17]. When a rear source node (
S) intends to transmit a warning message to destination (
D) having
,
between
D and the next hop (
H) is computed as [
17]
In a case, where
D remains rear to
S,
is computed as [
17]
Similarly, when
S and
D exhibit opposite directions, Equation (
6) is used to compute
when these nodes are moving towards each other, whereas Equation (
7) is used when
S and
D are moving away from one another. Such a direction-aware routing process to find the best enhances network throughput, and reduces packets drop ratio and end-to-end delays that results in timely delivery of warning messages [
17]. The network layer then hands over the warning message to the MAC layer.
3.4. DVCA MAC Layer
At the MAC layer, DVCA performs inter-cluster as well as intra-cluster clock synchronizations. Thus, local clocks of the member nodes of all clusters on a bi-directional highway get synchronized to a common clock in order to improve channel utilization. Moreover, since warning messages are time-critical, our three-tier priority assignment algorithm, proposed in [
18], is used to transmit critical warning messages at higher priority. The first tier takes the direction component into account and selects a relay node bearing direction towards the destination node using Equations (
6) and (
7) in a similar manner to the network layer. The second tier bifurcates (
W)s and non-warning messages (
)s, and assigns higher priority to (
W)s. The third tier differentiates among warning messages of different severity levels, which helps to disseminate highly critical warning messages on top priority. Here, DVCA sets the severity level based on the collision probability computed at the application layer, as shown in
Table 2. This tier prioritizes the warning messages further as below.
Switch (L)
Case:
Wait for a free time slot
Case:
Request to release a time slot
Case:
Release a reserved time slot by a non-warning or low priority warning message.
End Switch
The aforementioned prioritized dissemination process enhances channel utilization and throughput, and results in reduced warning message drop rate and end-to-end delays [
18].
DVCA uses the standard IEEE 802.11p at the physical layer. Once a warning message is received by a destination node, the destination node decrypts and authenticates the message and adopts the communicated preventive measures, i.e., the safe speed, to avoid a possible collision.
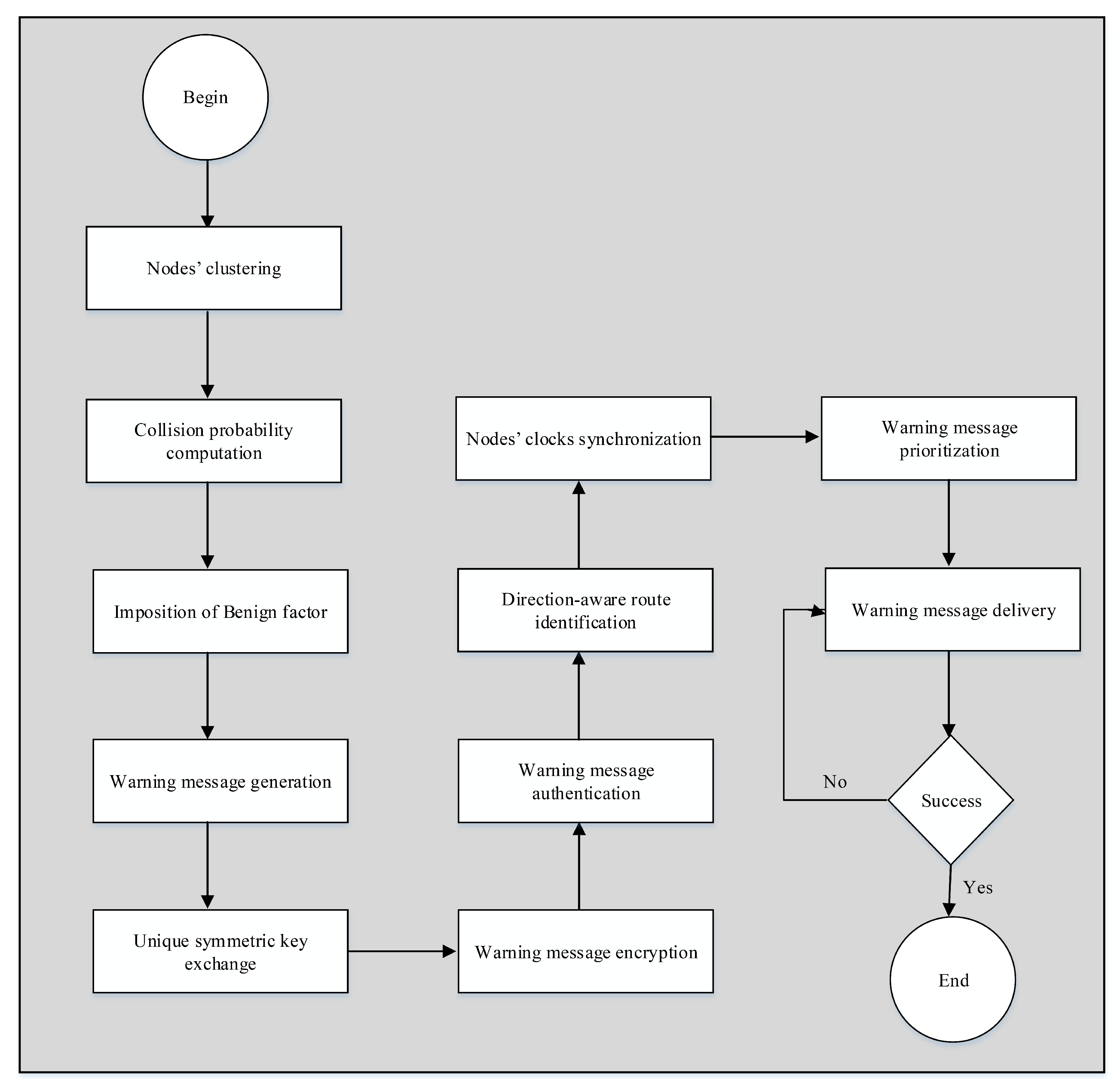
Figure 4 presents the procedural flowchart of the proposed DVCA architecture.
4. Performance Evaluation
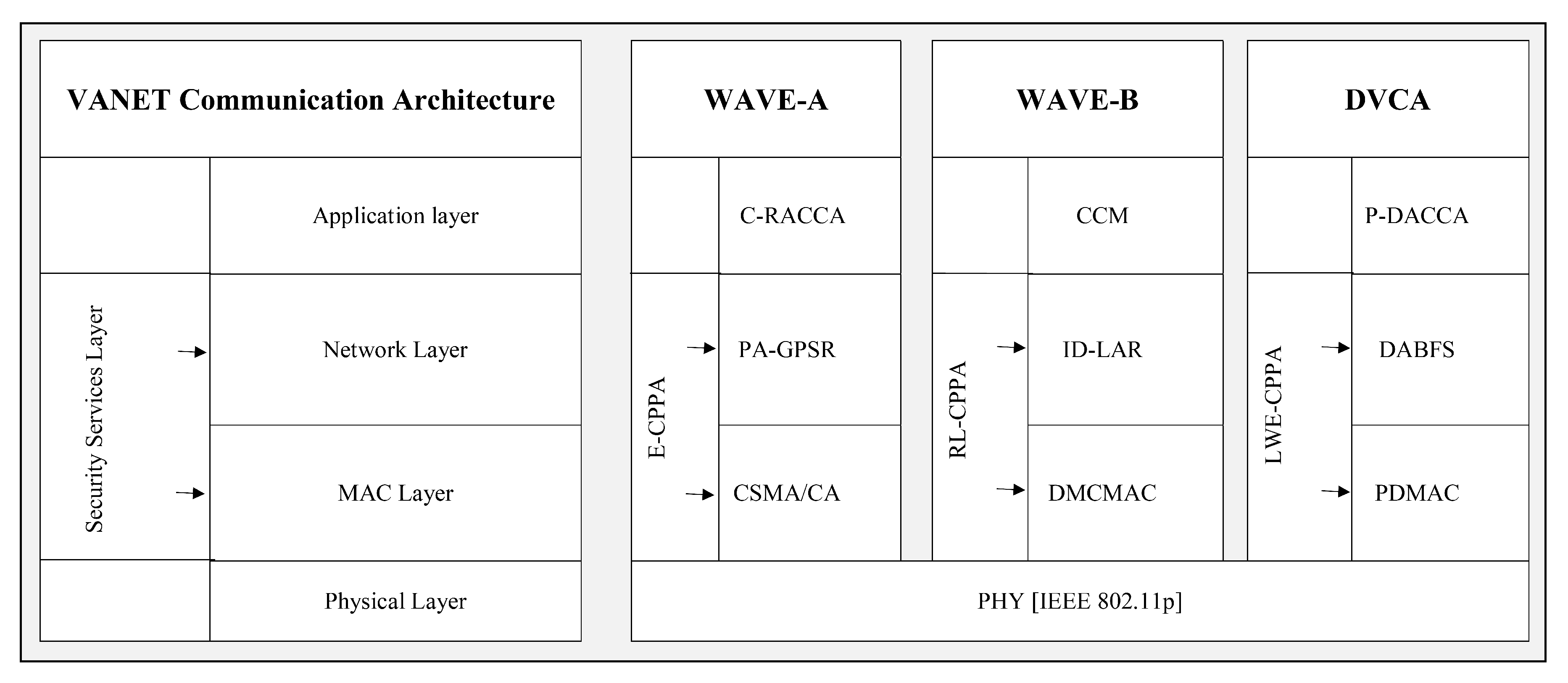
This section evaluates the proposed DVCA architecture compared with two different variants of the WAVE architecture, referred to as WAVE-A and WAVE-B. WAVE-A employs Cluster-based Risk-Aware Cooperative Collision Avoidance (C-RACCA) [
6], Enhanced-CPPA (E-CPPA) [
41], Path Aware-Greedy Perimeter Stateless Routing (PA-GPSR) [
42], and Carrier-Sense Multiple Access with Collision Avoidance (CSMA/CA) [
43] at application, security services, network, and MAC layers, respectively. Similarly, WAVE-B employs Collision Computation Model (CCM) [
44], Registration List-based CPPA (RL-CPPA) [
45], Improved Directional- Location Added Routing (ID-LAR) [
46], and Distributed Multi-Channel MAC (DMCMAC) [
47] at application, security services, network, and MAC layers, respectively. Likewise, DVCA has P-DACCA [
15], LWE-CPPA [
16], DABFS [
17], and PDMAC [
18] on its application, security services, network, and MAC layers, respectively. The physical layer standard for the three competing collision avoidance architectures is PHY IEEE 802.11p.
Figure 5 depicts a comparison of the protocol suites of the three competing collision avoidance architectures. The simulation area is taken as 2500 m × 1200 m. The number of nodes ranges from 1–100, where each node moves with randomly assigned speed belonging to
in a bi-directional highway scenario, as depicted in
Figure 2. Simulation results are derived using ns-2.35. For security analysis, the Automated Validation of Internet Security Protocols and Applications (AVISPA) [
16] and Multiprecision Integer and Rational Arithmetic Cryptographic Library (MIRACL) [
48] are used. The results are averaged over 20 replicated runs using different random seed values.
Table 3 presents the simulation parameters. Simulation results of the proposed DVCA architecture are validated through analytical results obtained on MATLAB (R2018a).
Since the objective of this paper is to evaluate the cumulative effect of our complete protocol suite (shown in
Figure 1) in mitigating collisions, in this section we consider security validation, computational overhead, communication overhead, reliable and in-time delivery of warning messages, inter-cluster collision avoidance and the effects of relative distance and speed on collisions as the performance evaluation metrics. Detailed performance metrics pertaining to each layer have been considered in our previous works [
15,
16,
17,
18], where each of the proposed protocol has been shown to outperform eminent existing protocols of the corresponding layer.
4.1. Security Validation
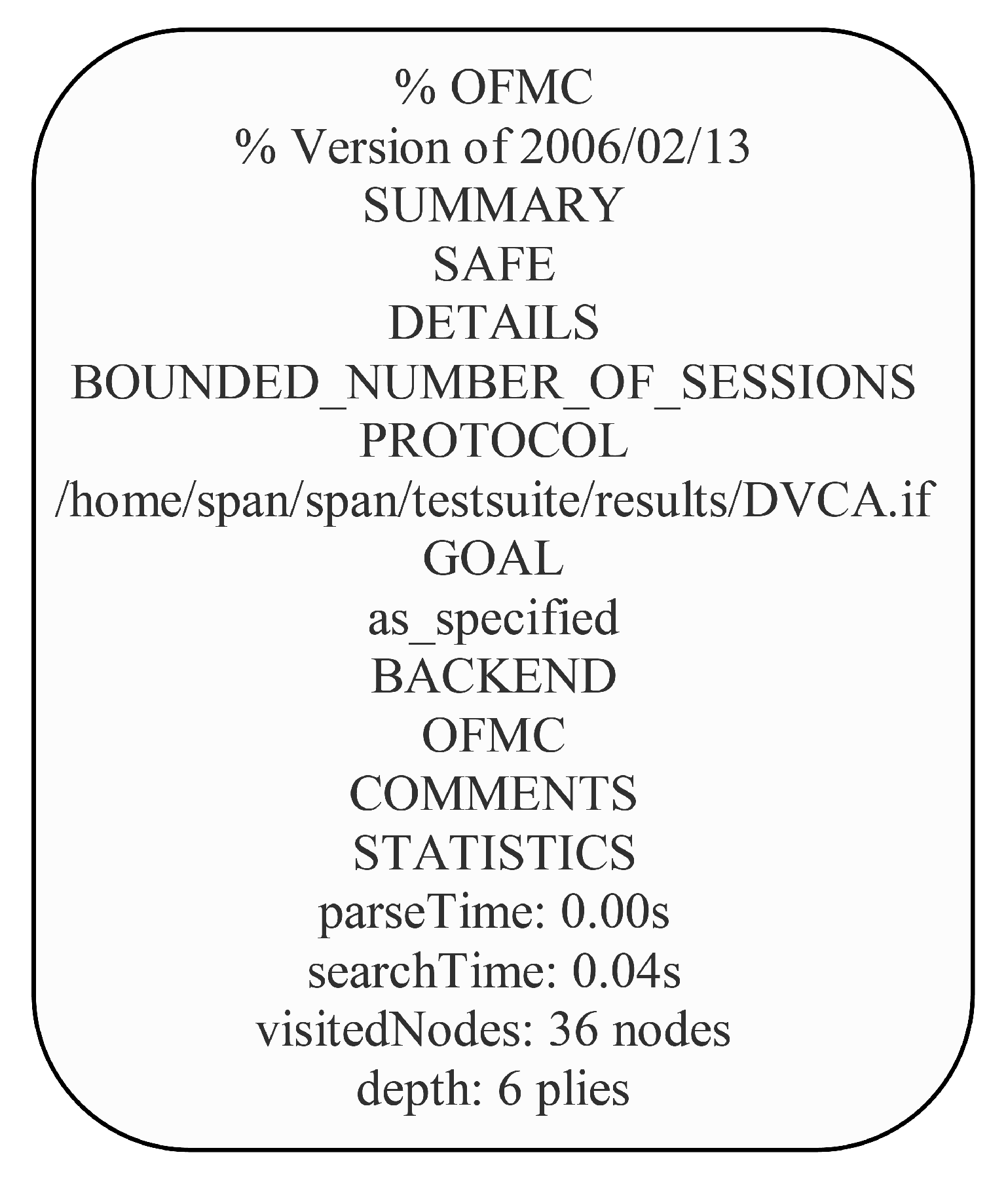
To validate the security features of the proposed DVCA architecture, we used AVISPA and conduct several experiments using Security Protocol Animator (SPAN) [
16]. The experiments were conducted using a Linux-based machine having Core i5-6300 processor with 8 gigabytes of memory. Two AVISPA models, namely, On-the-Fly-Model-Checker (OFMC) and the Constraint-Logic-based Attack Searcher (CL-AtSe) were used for security validation. The OFMC model verified the protocol security, syntax, semantics, and correctness, whereas the CL-AtSe model validated the security of a protocol against a number of attacks. Results depicted in
Figure 6 and
Figure 7 demonstrated that DVCA was
safe with respect to the aforementioned AVISPA models.
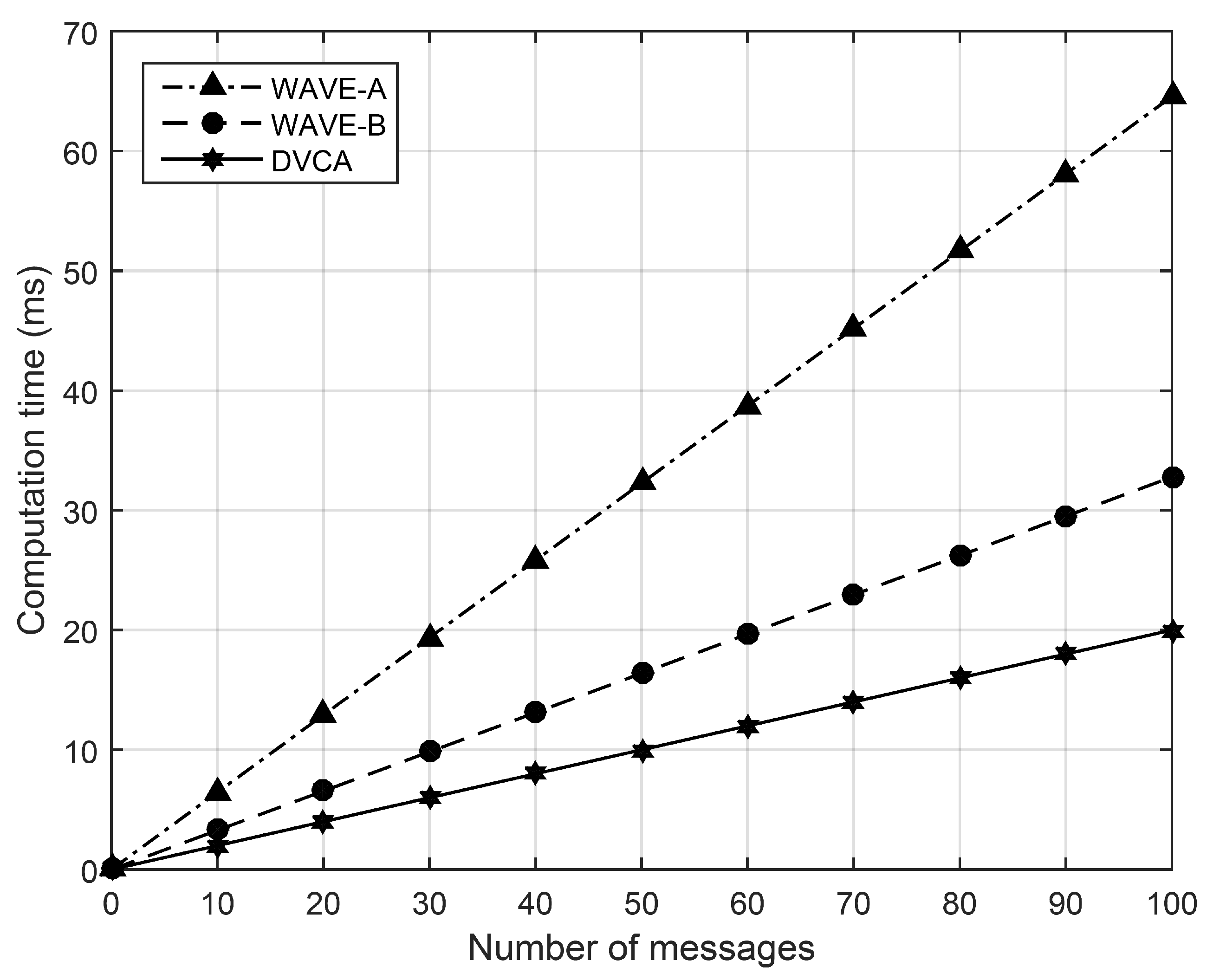
4.2. Computational Overhead
Computational overhead is one of the factors affecting the in-time delivery of warning messages [
16], thus, reducing this overhead enables fast delivery of warning messages. This extends the reaction time to apply the preventive measures that helps in minimizing the collisions among nodes, as demonstrated in
Section 4.5,
Section 4.6 and
Section 4.7. Thus, besides providing security, the security services layer should also minimize the computational overhead in securing time-sensitive warning messages. To this end, DVCA reduced the computation time reasonably by effectively using logical operations and excluding computationally expensive operations, such as
. Results depicted in
Figure 8 show reasonably minimized computation time for DVCA, compared to WAVE-A and WAVE-B, in securing the warning messages.
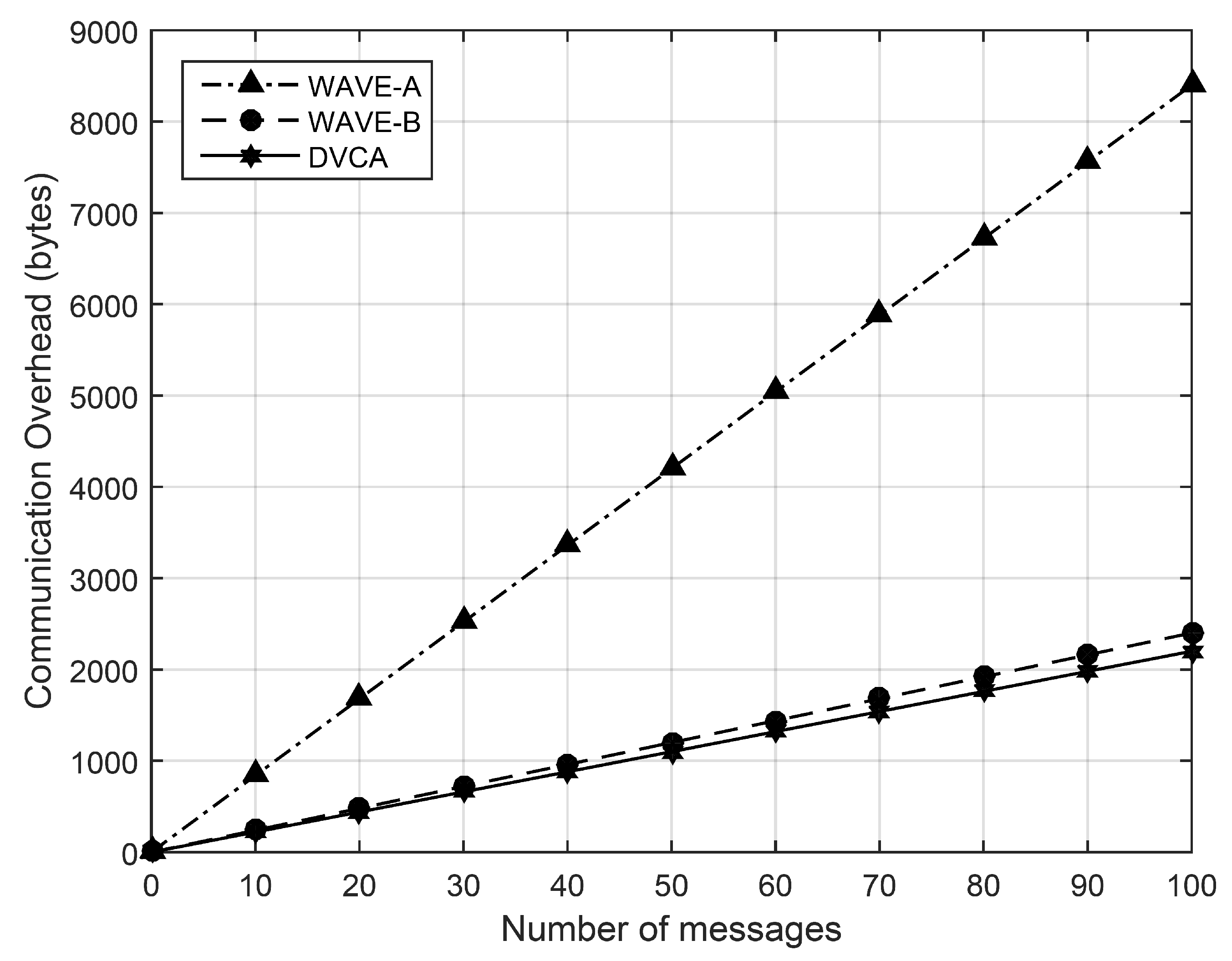
4.3. Communication Overhead
DVCA minimizes the communication overhead by reducing the size of the ciphertext generated as a result of encryption and authentication process performed on warning message. The results depicted in
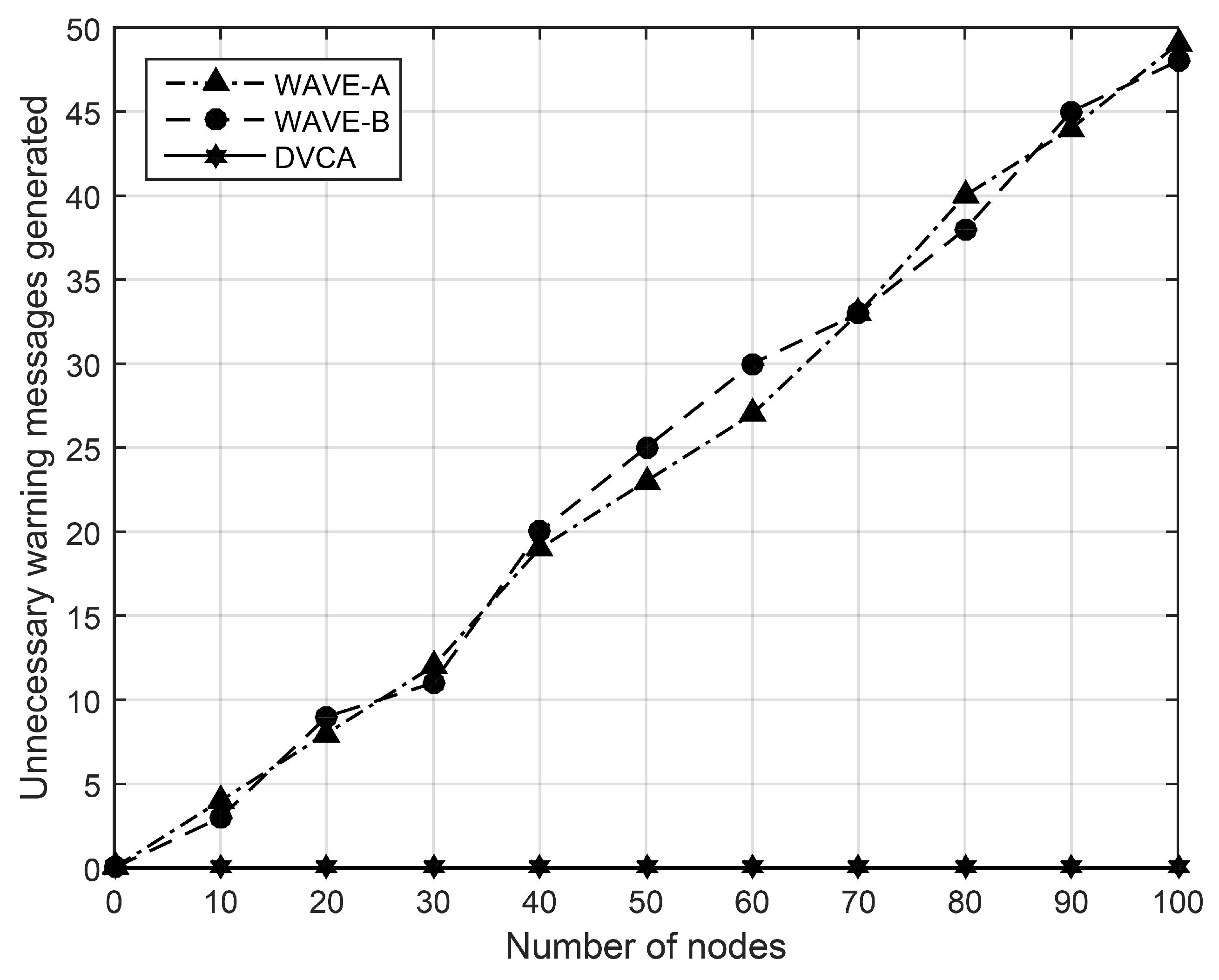
Figure 9 show minimized communication overhead for DVCA in comparison with WAVE-A and WAVE-B. Moreover, since WAVE-A and WAVE-B were not direction-aware, unnecessary warning messages were generated for nodes travelling on the opposite side of the highway. Conversely, DVCA introduced a novel direction-aware probability computation process that restricted warning messages generation for nodes on the same side of the road only. The warning messages generation was further restricted, in DVCA, with a pre-defined threshold in terms of collision probability. Hence, a warning message was only generated when this threshold was exceeded. Results presented in
Figure 10 validated this claim, where DVCA outperformed WAVE-A and WAVE-B by avoiding unnecessary warning messages generation for the nodes on the opposite side of the road. Communication overhead is yet another factor that affects the in-time delivery of time-sensitive warning messages [
16]. Thus, reducing this overhead further minimized the end-to-end delays experienced during warning messages transmission. This resulted in providing extended reaction time to apply the preventive measures, which minimized the number of collisions among nodes, as demonstrated in
Section 4.5,
Section 4.6 and
Section 4.7.
4.4. Reliable and In-Time Delivery of Warning Messages
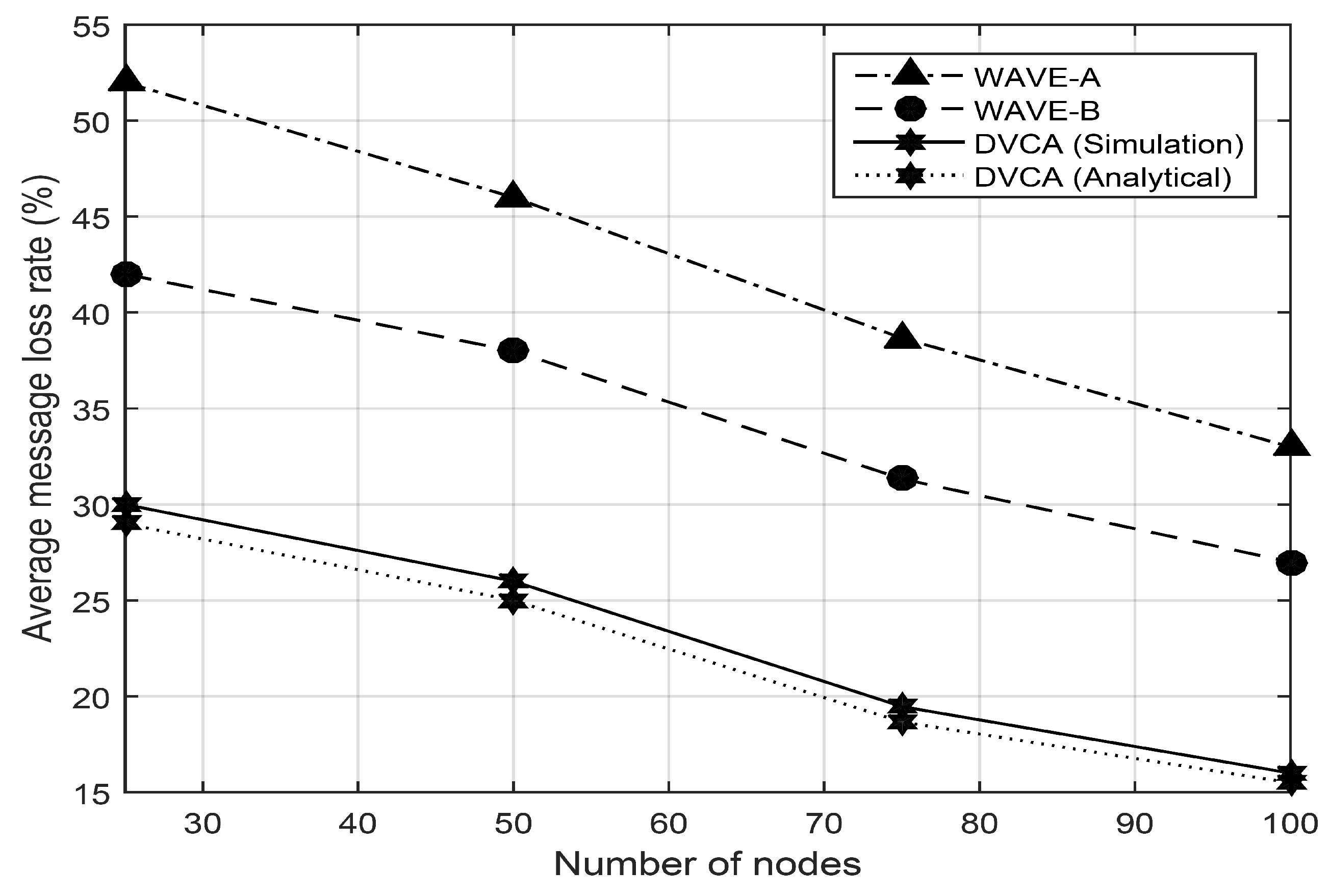
This section evaluates the performance of the competing architectures in terms of reliable and in-time delivery of warning messages. Reliability refers to ensuring successful warning messages delivery. Reliable transmission of warning messages remains critical for collision avoidance, which is achieved by reducing the message loss ratio. DVCA provides direction-aware routing of warning messages, which reduces the message loss ratio [
17]. Furthermore, DVCA employs its novel three-tier prioritization technique at MAC layer to differentiate among warning messages of different severity levels. This enables the transmission of warning messages having greater collision probability at higher priority to further reduce the warning messages loss ratio [
18]. The results shown in
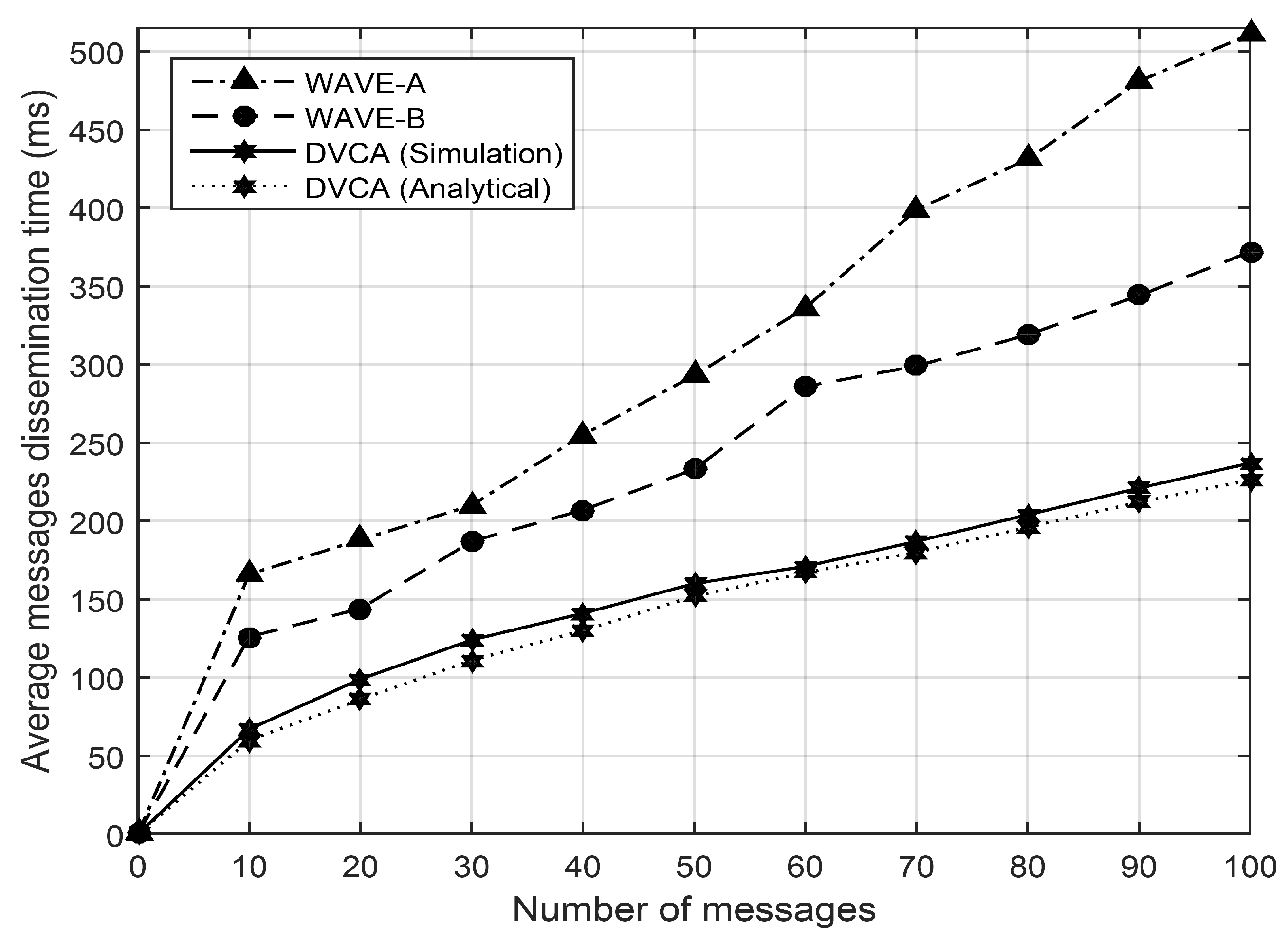
Figure 11 validated the aforementioned claim and demonstrated the efficacy of DVCA, in terms of reduced message loss ratio, in comparison with WAVE-A and WAVE-B. Moreover, reducing the warning messages dissemination time also helped in better collision avoidance, as it provided increased reaction time for the application of preventive measures. Results presented in
Figure 12 demonstrated superior performance of DVCA, in terms of reduced average warning dissemination time, in comparison with WAVE-A and WAVE-B. There were three major reasons for the better performance of DVCA: (1) reduced computational and communication overheads at the security service layer, (2) the direction-aware routing at network layer that catered for the topological changes efficiently and finds the shortest path, and (3) the three-tier prioritization process at the MAC layer.
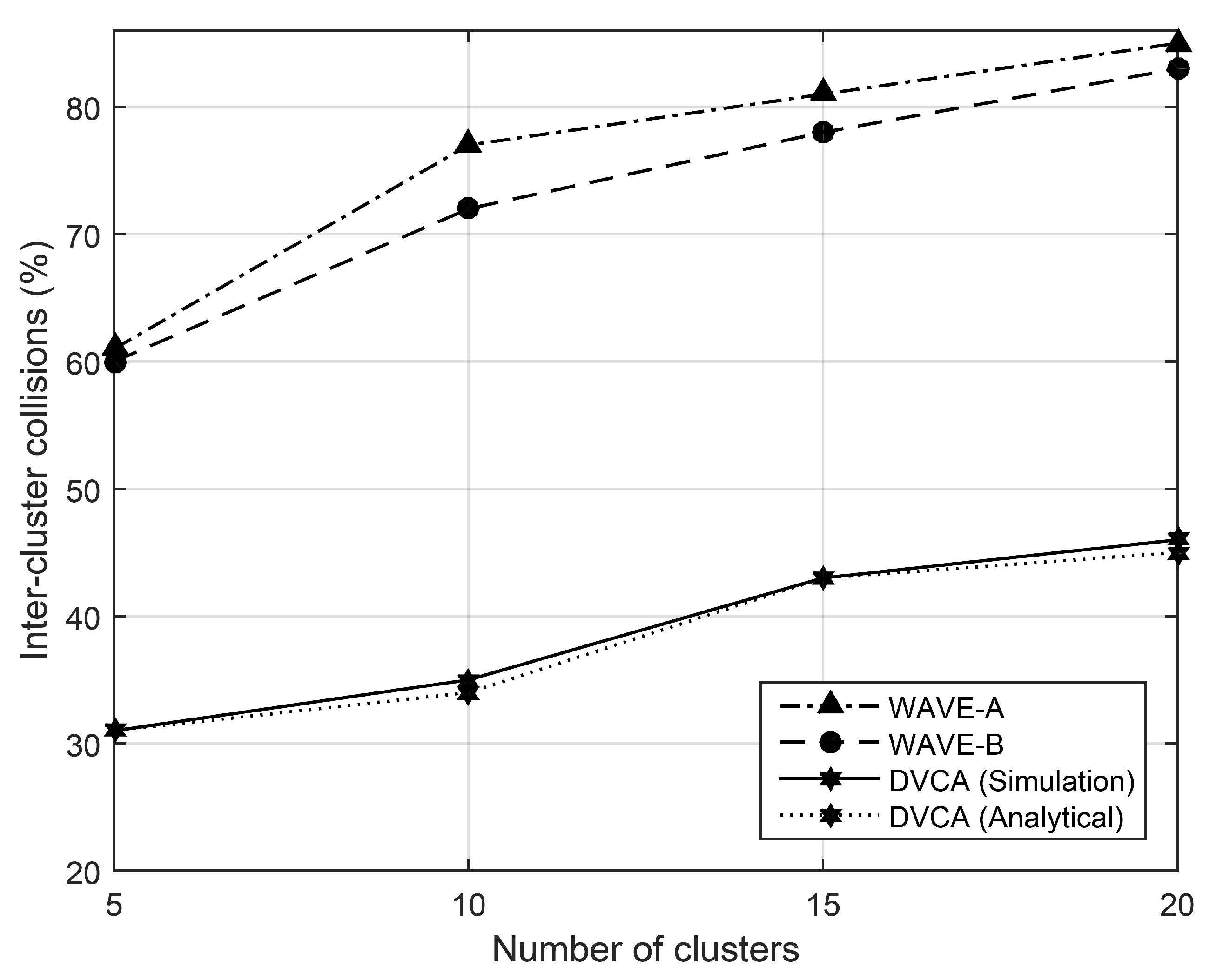
4.5. Inter-Cluster Collisions
In order to evaluate the performance of the three competing architectures in terms of reducing inter-cluster node collisions, we considered a scenario that took clusters in the range 5–20. The maximum number of member nodes in each cluster was 5. An initial distance of 5 m was taken among clusters, which varied as the nodes in each cluster moved with respect to their randomly assigned speeds from the set
.
Figure 13 demonstrates the results that compared DVCA, WAVE-A, and WAVE-B in terms of inter-cluster node collisions. Here, DVCA showed improved efficiency by
and
in comparison with WAVE-A and WAVE-B, respectively, due to its efficient collision prediction process and adaptive preventive measures. Moreover, the direction-aware, timely, and reliable warning messages dissemination at network and MAC layers in DVCA also played a key role in reducing collisions among nodes that lay near the edges of their corresponding clusters.
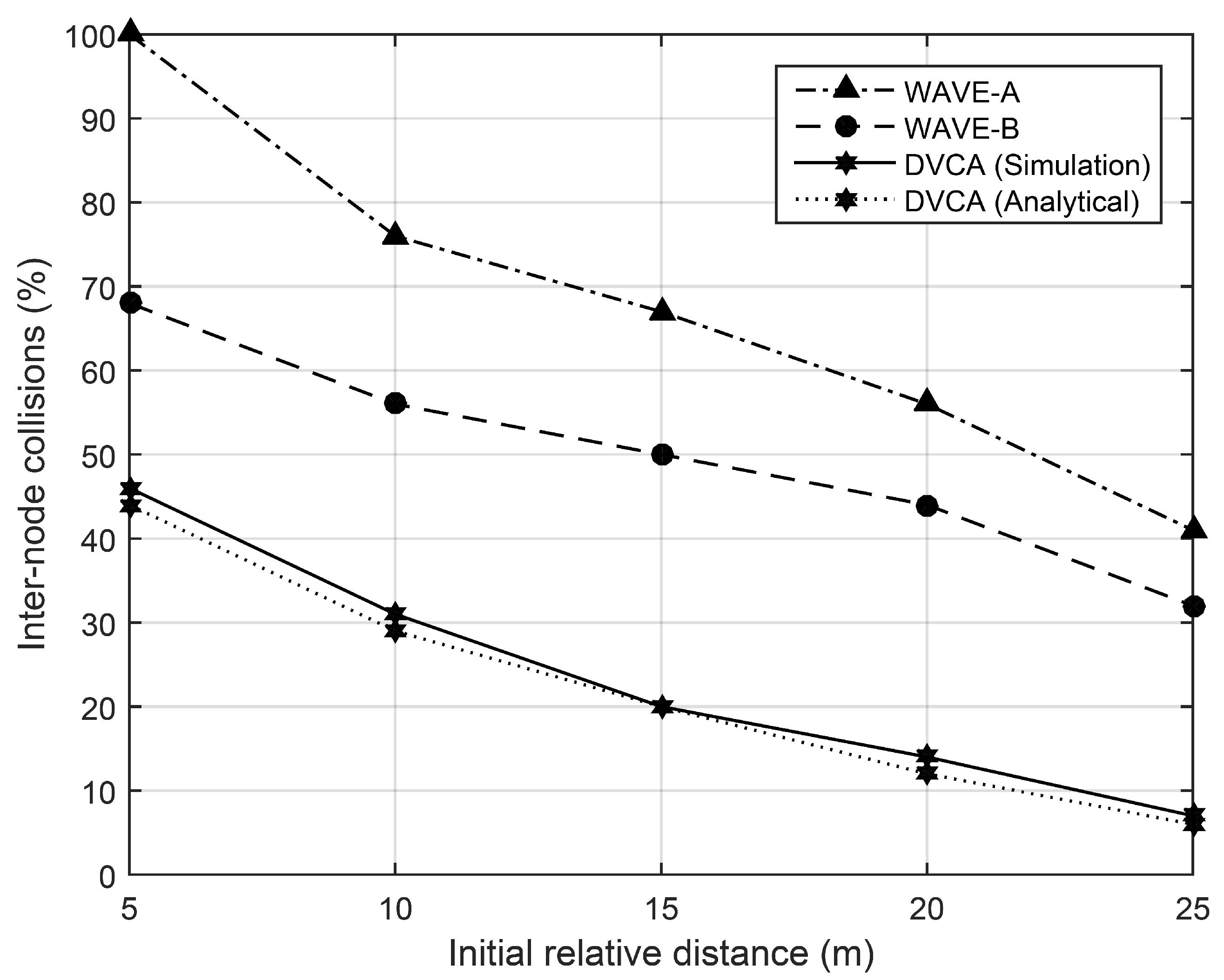
4.6. Effect of Relative Distance on Collisions
This section compares the performance of the competing collision avoidance architectures with respect to the effect of relative distance on nodes’ collisions. A scenario with 100 nodes, deployed initially with a relative distance that ranges between 5–25 m, was considered. Safe distance among nodes was taken as the distance covered by nodes in 2 s, which remained a function of the nodes’ speeds [
49]. Since the number of collisions decreased with increase in the relative distance among nodes, this behavior was exhibited by all competing architectures in the results depicted in
Figure 14.
WAVE-A and WAVE-B lacked efficient collision identification on bi-directional highways, as these architectures did not consider the direction component. Conversely, DVCA provided a direction-aware collision probability computation technique that resolved the aforementioned issue. Additionally, WAVE-A and WAVE-B relied on fixed deceleration as preventive measures, due to which these architectures experienced performance degradation in scenarios where a rear node exhibited higher speed in comparison with the front node. To this end, DVCA imposed an adaptive preventive measure through our Benign factor [
15], which enables better collision avoidance. Moreover, in addition to efficient collision identification and preventive measures, timely and reliable delivery of warning messages also remains critical. In this regard, DVCA took into account the direction component in finding the most appropriate path to a destination node, which was found lacking in WAVE-A and WAVE-B architectures.
Furthermore, wireless channel utilization is also important to ensure efficient warning messages delivery. Since WAVE-A and WAVE-B assigned the same priority to both warning and non-warning messages, the warning messages either got dropped or experienced extensive end-to-end delays when the ratio of non-warning messages increased. To this end, DVCA employed a three-tier priority assignment technique, which enabled enhanced warning messages delivery in comparison with WAVE-A and WAVE-B. Reliable and timely transmission of warning messages provided a favourable environment to timely apply the preventive measures, thereby, reducing the number of collisions. The results shown in
Figure 14 validated the efficacy of DVCA with average improved performance of
and
, as compared with WAVE-A and WAVE-B, respectively.
4.7. Effect of Relative Speed on Collisions
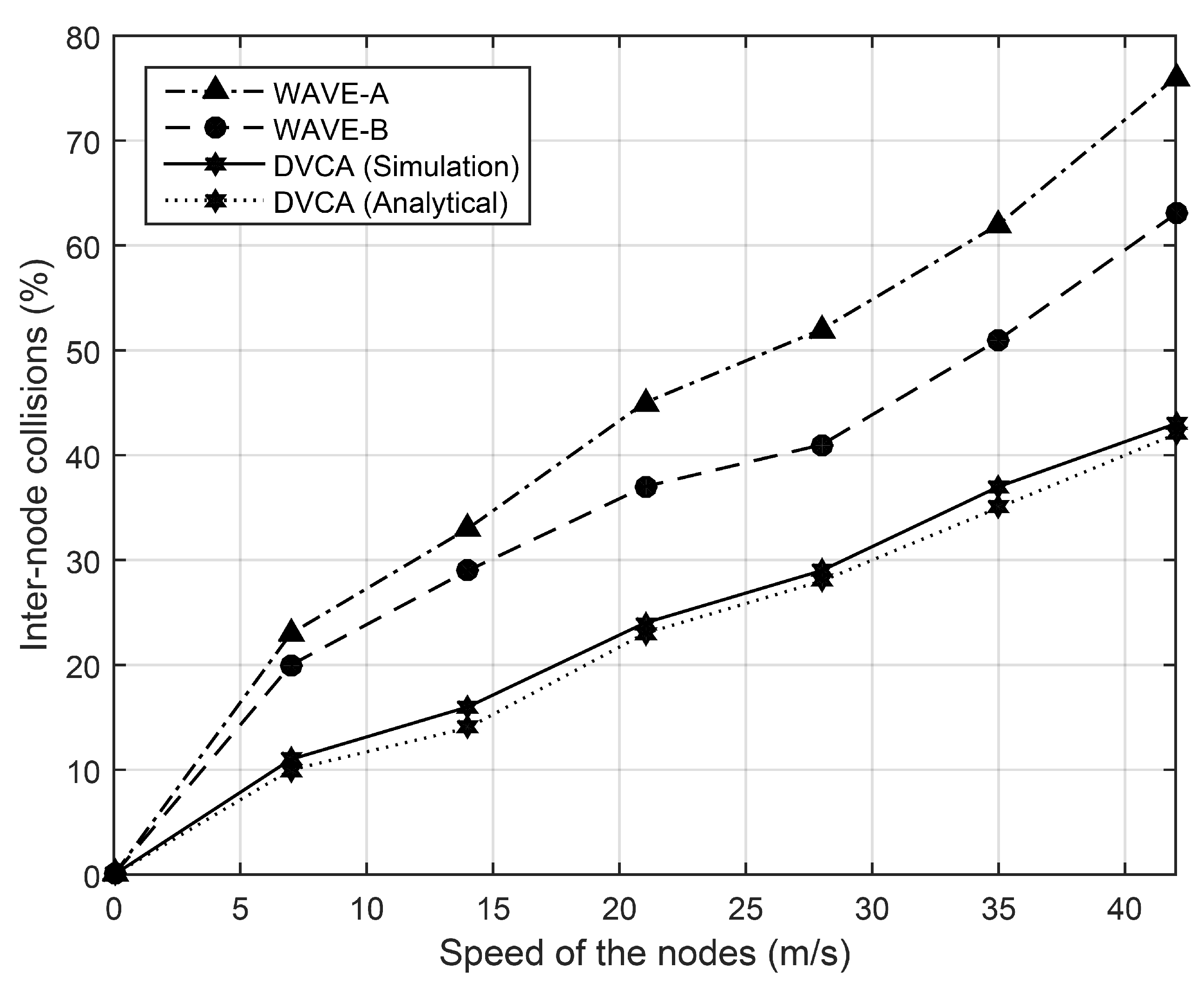
This section analyzes the impact of relative speed upon collisions. A total number of 100 nodes were taken, where each node was assigned a random speed in the range 0–42 m/s. A 7 m/s speed interval was taken to observe and record collisions. Initially, the distance among nodes was taken between 5–30 m. The distance varied when the nodes continued to move with random speeds assigned within .
The speed of nodes was a major reason for collisions. Since both WAVE-A and WAVE-B relied upon fixed deceleration to prevent collisions, these architectures experienced performance degradation in situations where rear nodes exhibited higher speeds in comparison to the front nodes. In such scenarios, a fixed deceleration became incapable of preventing the possible collisions. Conversely, DVCA performed adaptive deceleration for collision avoidance. The safe speed was computed in accordance with the speed of the front node and the deceleration rate remained proportional to the speed of the rear node. Moreover, network and MAC layers of DVCA remained direction-aware during the transmission of warning messages, which provided reliable and timely delivery of warning messages. The results presented in
Figure 15 demonstrated that DVCA yielded much fewer collisions with average improved performance of
and
compared with WAVE-A and WAVE-B, respectively.
4.8. Critical Discussion
Since highway collisions are one of the major causes of casualties around the world today, this makes collision avoidance an enticing area of research. Modern transportation systems employ VANETs for improving traffic flow, travel time estimation, route identification, and collision avoidance. The existing VANET communication standards, such as WAVE, comprise a layered architecture with a protocol suite. These architectures can be utilized for developing various VANET applications, such as infotainment, route identification, and collision avoidance. However, for efficient collision avoidance, a number of challenges must be addressed across all layers of the architecture. Our previous works [
15,
16,
17,
18] have addressed layer-wise challenges related to collision avoidance on bi-directional highways using V2V communications. Each proposed protocol has been demonstrated to outperform eminent existing protocols of the corresponding layer. However, for performance evaluation in [
15,
16,
17,
18], only the performance metrics of the corresponding layer were taken into account. For generating simulation results of a particular protocol, standard protocols were used at all other layers.
This paper has presented a novel V2V architecture, called Direction-Aware Vehicular Collision Avoidance (DVCA), which consolidates our previous works [
15,
16,
17,
18] into a complete protocol suite. The proposed collision avoidance architecture includes P-DACCA [
15], LWE-CPPA [
16], DABFS [
17], and PDMAC [
18] at its application, security services, network, and MAC layers, respectively, as shown in
Figure 1. The paper then evaluates the cumulative effect of the protocol suite. We have shown in this paper that collision avoidance can not only be enhanced by efficient clustering, effective probability computation, and adaptive preventive measures at the application layer, but it can also be improved by considering the direction component on network and MAC layers. Simulation and analytical results presented in this section validate the efficacy of DVCA, in terms of reduced collisions among nodes in comparison with eminent VANET architectures.
Section 4.1 has validated the security features of DVCA using the OFMC and CL-AtSe models of AVISPA to demonstrate that DVCA is
.
Section 4.2 and
Section 4.3 have evaluated the computational and communication overheads, respectively. DVCA has been shown to reasonably reduce both of the overheads in comparison with other eminent architectures. The reduced overheads along with direction-aware prioritized warning messages dissemination result in reduced average warning message dissemination time for DVCA in comparison with the other architectures. The results demonstrated in
Section 4.4 have indicated improved performance of DVCA, in terms of reasonably reduced message loss ratio and warning messages dissemination time to enable reliable and in-time warning messages delivery.
Section 4.5 has compared performance with respect to inter-cluster collision avoidance, where DVCA has demonstrates improved efficiency by
and
in comparison with WAVE-A and WAVE-B, respectively.
Section 4.6 has evaluated the performance of DVCA with respect to the effect of relative distance on collisions, in comparison with eminent VANET architectures. It is shown that DVCA reduces collisions by
and
in comparison with WAVE-A and WAVE-B, respectively. Moreover,
Section 4.7 has evaluated the relationship between the nodes’ collisions and the relative speeds. Once again, DVCA exhibited superior performance in terms of reduced collisions by
and
, compared with WAVE-A and WAVE-B, respectively. Thus, DVCA can be deployed as an effective tool to reduce collisions on bi-directional highways.
The limitation of DVCA, however, is that it is not designed for urban environments comprising intersections. This limitation will be addressed in our future work. Another research direction is to present a more suitable PHY protocol for DVCA.

 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}