Model Identification and Trajectory Tracking Control for Vector Propulsion Unmanned Surface Vehicles



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. USV Modeling and Identification
2.1. Lanxin USV with Vector Propulsion
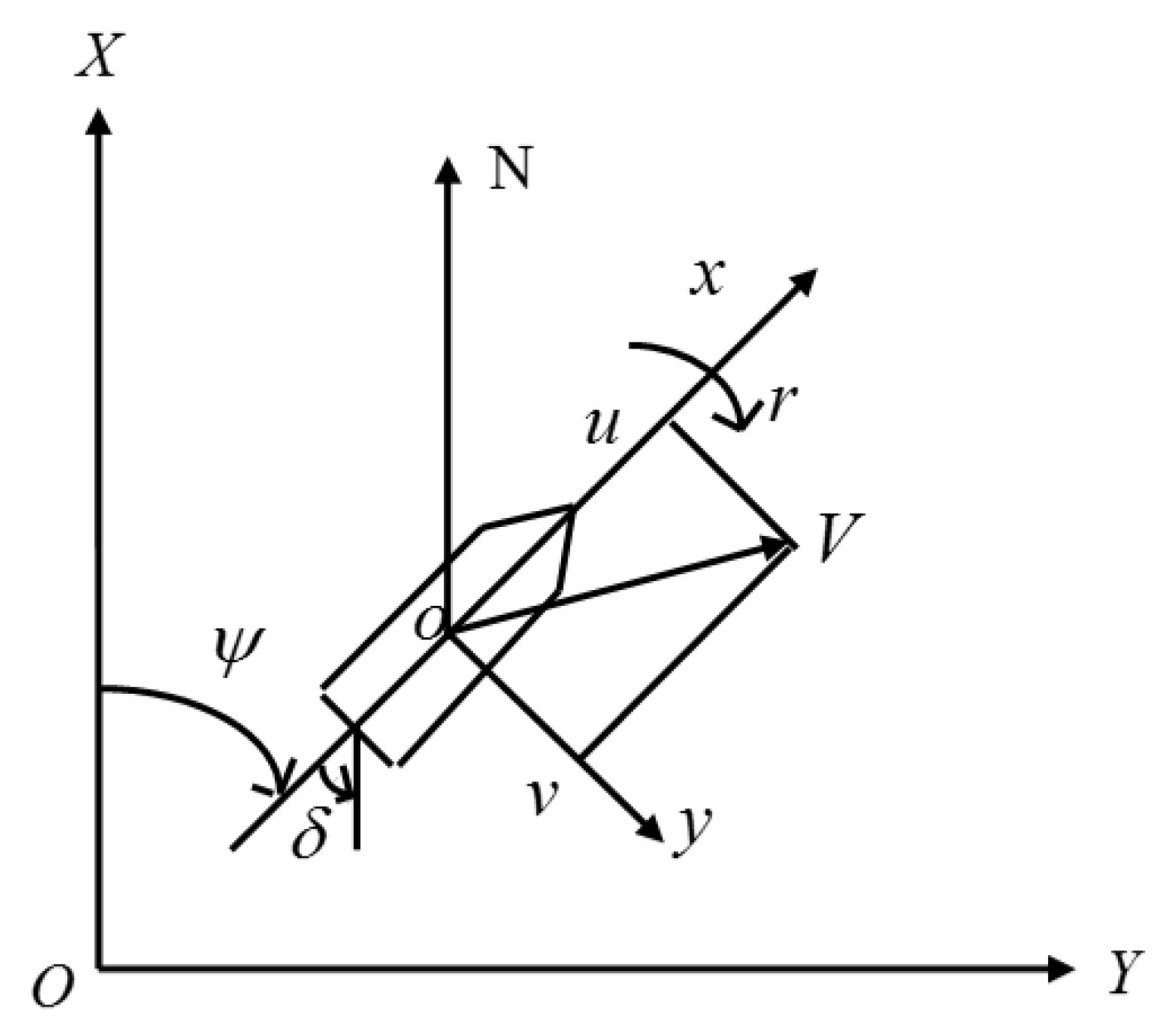
2.2. Mathematical Model of the USV
2.3. Model Identification
2.4. Model Validation
3. Trajectory Tracking Controller
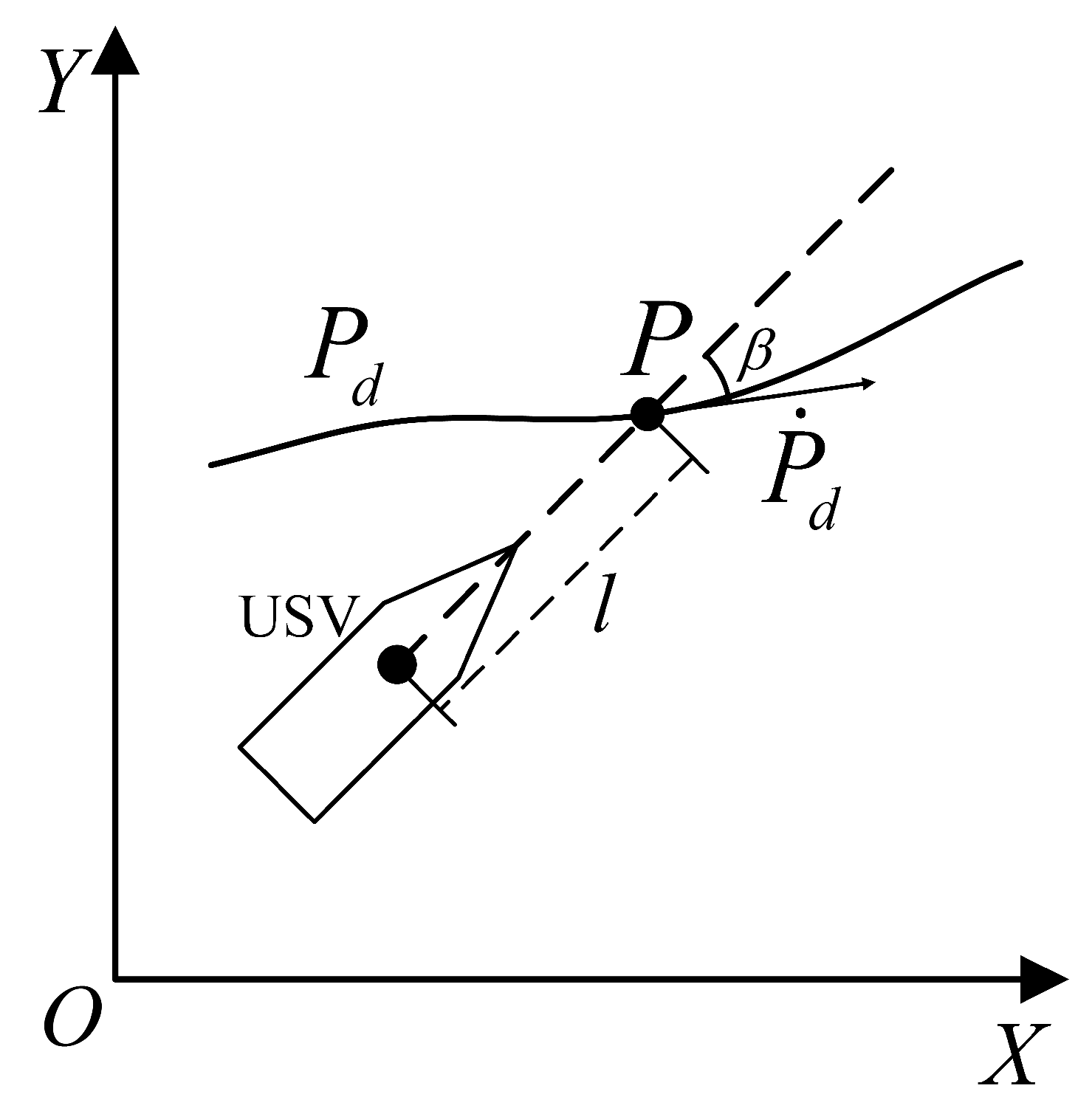
3.1. Preliminaries
- Remark 1: There are unknown positive constants , , , so the d satisfies , , .
- Remark 2: The reference trajectory requires sufficient smoothness, i.e., , , , , , are all bounded.
3.2. Controller Design
- Remark 3: , , . For any , , we set , .
4. Stability Analysis
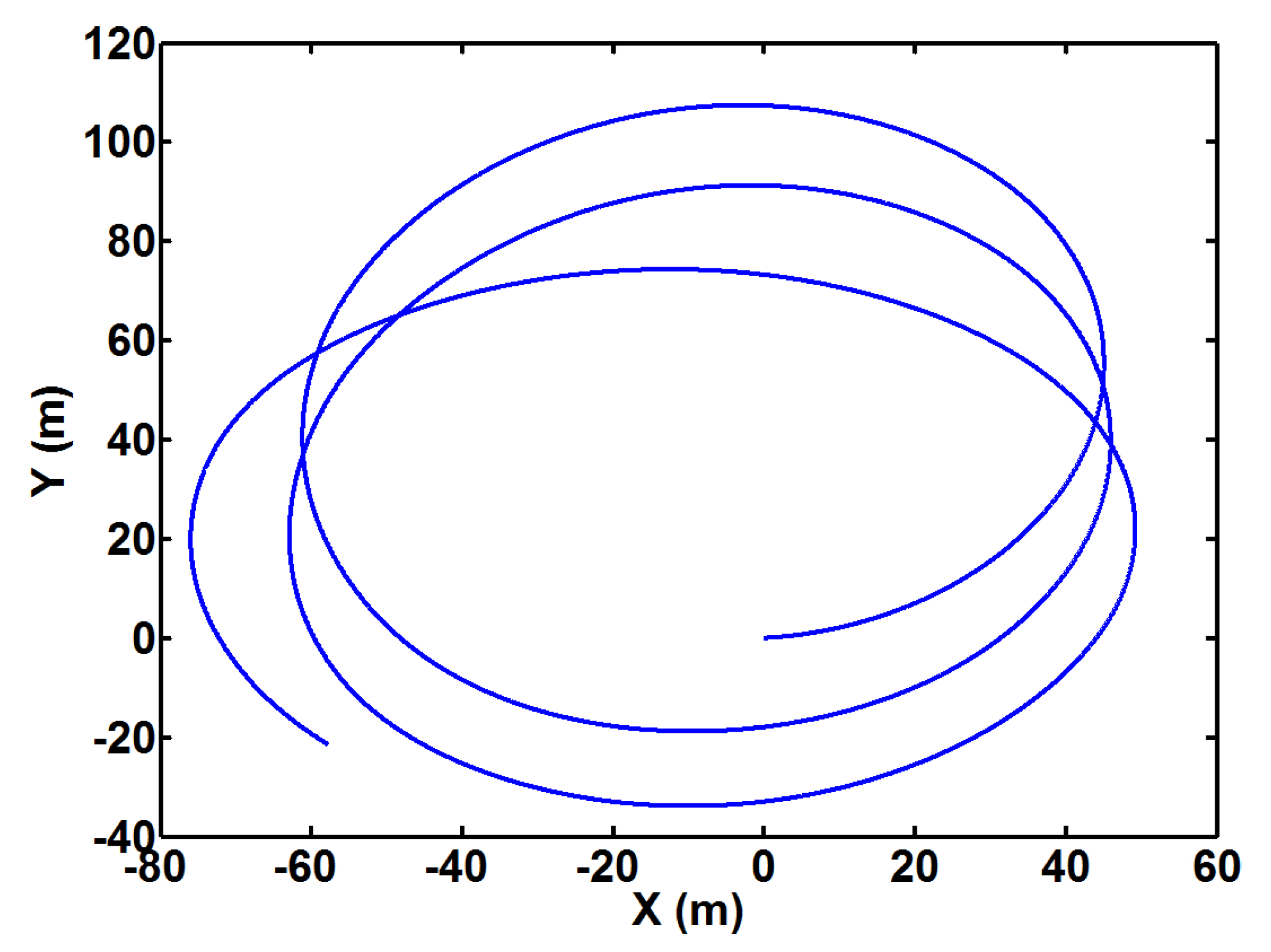
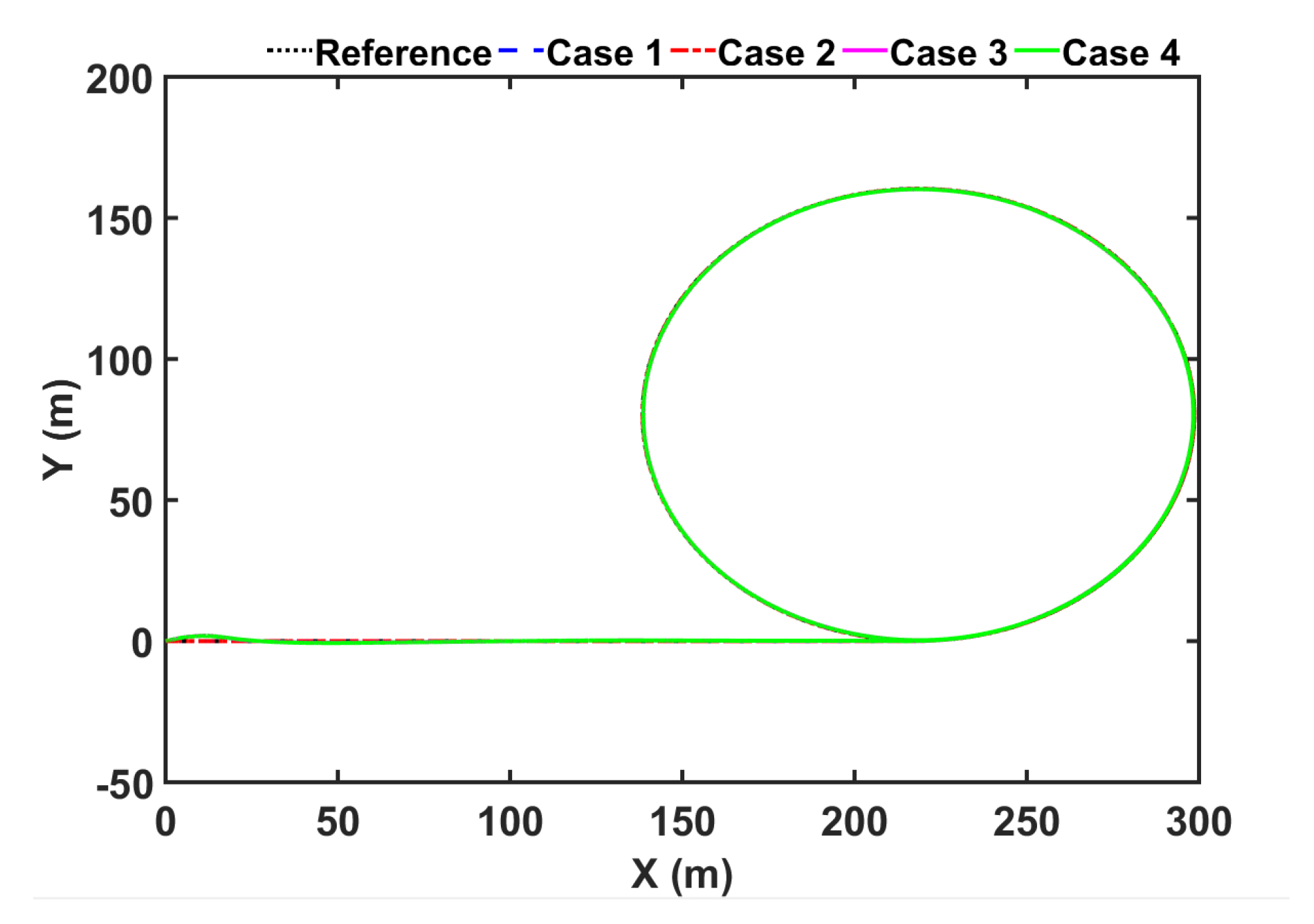
5. Simulation Study
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Qiao, D.L.; Liu, G.Z.; Zhang, J.; Zhang, Q.Y.; Wu, G.X.; Dong, F. (MC)-C-3: Multimodel-and-Multicue-Based Tracking by Detection of Surrounding Vessels in Maritime Environment for USV. Electronics 2019, 8, 723. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning. ISA Trans. 2015, 56, 75–85. [Google Scholar] [CrossRef]
- Yao, W.; Zhang, J.; Liu, Y.; Zhou, M.; Sun, M.; Zhang, G. Improved Vector Control for Marine Podded Propulsion Control System Based on Wavelet Analysis. J. Coast. Res. 2015, 73, 54–59. [Google Scholar] [CrossRef]
- Gierusz, W. Modelling the Dynamics of Ships with Different Propulsion Systems for Control Purpose. Polish Marit. Res. 2016, 23, 31–36. [Google Scholar] [CrossRef]
- Abkowitz, M.A. Lectures on Ship Hydrodynamics—Steering and Maneuverability; Technical Report; Hydro’ and Aerodynamic’s Laboratory: Lyngby, Denmark, 1964. [Google Scholar]
- Norrbin, N.H. Theory and observation on the use of a mathematical model for ship maneuvering in deep and confined waters. In Proceedings of the 8th Symposium on Naval Hydrodynamics, Pasadena, CA, USA, 24–28 August 1970. [Google Scholar]
- Ogawa, A.; Koyama, T.; Kijima, K. MMG report-I, on the mathematical model of ship manoeuvring. Bull. Soc. Naval Archit. Jpn. 1977, 575, 22–28. [Google Scholar]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef]
- Lu, X.j.; Zhou, Q.d.; Fang, B. Hydrodynamic performance of distributed pump-jet propulsion system for underwater vehicle. J. Hydrodyn. 2014, 26, 523–530. [Google Scholar] [CrossRef]
- Xiong, Y.; Zhang, K.; Wang, Z.Z.; Qi, W.J. Numerical and Experimental Studies on the Effect of Axial Spacing on Hydrodynamic Performance of the Hybrid CRP Pod Propulsion System. China Ocean Eng. 2016, 30, 627–636. [Google Scholar] [CrossRef]
- Wang, Z.Z.; Xiong, Y.; Wang, R.; Zhong, C.h. Numerical investigation of the scale effect of hydrodynamic performance of the hybrid CRP pod propulsion system. Appl. Ocean Res. 2016, 54, 26–38. [Google Scholar] [CrossRef]
- Gierusz, W. Simulation model of the LNG carrier with podded propulsion Part I: Forces generated by pods. Ocean Eng. 2015, 108, 105–114. [Google Scholar] [CrossRef]
- Gierusz, W. Simulation model of the LNG carrier with podded propulsion, Part II: Full model and experimental results. Ocean Eng. 2016, 123, 28–44. [Google Scholar] [CrossRef]
- Reichel, M. Prediction of manoeuvring abilities of 10000 DWT pod-driven coastal tanker. Ocean Eng. 2017, 136, 201–208. [Google Scholar] [CrossRef]
- Mu, D.D.; Wang, G.F.; Fan, Y.S. Design of Adaptive Neural Tracking Controller for Pod Propulsion Unmanned Vessel Subject to Unknown Dynamics. J. Electr. Eng. Technol. 2017, 12, 2365–2377. [Google Scholar]
- Su, Y.X.; Zheng, C.H.; Mercorelli, P. Nonlinear PD Fault-Tolerant Control for Dynamic Positioning of Ships With Actuator Constraints. IEEE/ASME Trans. Mechatron. 2017, 22, 1132–1142. [Google Scholar] [CrossRef]
- Xie, W.; Ma, B.; Huang, W.; Zhao, Y. Global trajectory tracking control of underactuated surface vessels with non-diagonal inertial and damping matrices. Nonlinear Dyn. 2018, 92, 1481–1492. [Google Scholar] [CrossRef]
- Abdelaal, M.; Fraenzle, M.; Hahn, A. Nonlinear Model Predictive Control for trajectory tracking and collision avoidance of underactuated vessels with disturbances. Ocean Eng. 2018, 160, 168–180. [Google Scholar] [CrossRef]
- Jin, J.C.; Zhang, J.; Liu, D.Q. Design and Verification of Heading and Velocity Coupled Nonlinear Controller for Unmanned Surface Vehicle. Sensors 2018, 18, 3427. [Google Scholar] [CrossRef]
- Consolini, L.; Tosques, M. A Minimum Phase Output in the Exact Tracking Problem for the Nonminimum Phase Underactuated Surface Ship. IEEE Trans. Autom. Control 2012, 57, 3174–3180. [Google Scholar] [CrossRef]
- Toussaint, G.J.; Basar, T.; Bullo, F. Tracking for nonlinear underactuated surface vessels with generalized forces. In Proceedings of the 2000 IEEE International Conference on Control Applications, Anchorage, AK, USA, 27 September 2000; pp. 355–360. [Google Scholar]
- Toussaint, G.J.; Basar, T.; Bullo, F. H-infinity-Optimal Tracking Control Techniques for Nonlinear Underactuated Systems. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; pp. 2078–2083. [Google Scholar]
- Sun, X.J.; Wang, G.F.; Fan, Y.S.; Mu, D.D.; Qiu, B.B. Collision Avoidance Using Finite Control Set Model Predictive Control for Unmanned Surface Vehicle. Appl. Sci. 2018, 8, 926. [Google Scholar] [CrossRef]
- Sun, X.J.; Wang, G.F.; Fan, Y.S.; Mu, D.D.; Qiu, B.B. An Automatic Navigation System for Unmanned Surface Vehicles in Realistic Sea Environments. Appl. Sci. 2018, 8, 193. [Google Scholar]
- Dong, W.; Guo, Y. Global time-varying stabilization of underactuated surface vessel. IEEE Trans. Autom. Control 2005, 50, 859–864. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Zhang, G.Q.; Deng, Y.J.; Zhang, W.D.; Huang, C.F. Novel DVS guidance and path-following control for underactuated ships in presence of multiple static and moving obstacles. Ocean Eng. 2018, 170, 100–110. [Google Scholar] [CrossRef]
- Liu, Y.; You, J.; Ding, F. Iterative identification for multiple-input systems based on auxiliary model-orthogonal matching pursuit. Control Decis. 2019, 34, 787–792. [Google Scholar]
- Ding, F. System Identification: Performance Analysis of Identification Methods; Science Press: Beijing, China, 2014. [Google Scholar]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. A Formation Collision Avoidance System for Unmanned Surface Vehicles With Leader-Follower Structure. IEEE Access 2019, 7, 24691–24702. [Google Scholar] [CrossRef]
- Jia, X.l.; Yang, Y.s. The Mathematical Model of Ship Motion Mechanism Modeling and Identification Modeling; Dalian Maritime University Press: Dalian, China, 1999. [Google Scholar]
- Morel, Y.; Leonessa, A. Indirect adaptive control of a class of marine vehicles. Int. J. Adapt. Control Signal Process. 2010, 24, 261–274. [Google Scholar] [CrossRef]
- Bu, X.W.; Wu, X.Y.; Wei, D.Z.; Huang, J.Q. Neural-approximation-based robust adaptive control of flexible air-breathing hypersonic vehicles with parametric uncertainties and control input constraints. Inf. Sci. 2016, 346, 29–43. [Google Scholar] [CrossRef]
- Bu, X.W.; Wu, X.Y.; Huang, J.Q.; Ma, Z.; Zhang, R. Minimal-learning-parameter based simplified adaptive neural back-stepping control of flexible air-breathing hypersonic vehicles without virtual controllers. Neurocomputing 2016, 175, 816–825. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Trajectory tracking sliding mode control of underactuated AUVs. Nonlinear Dyn. 2016, 84, 1079–1091. [Google Scholar] [CrossRef]
- Pan, C.Z.; Lai, X.Z.; Yang, S.X.; Wu, M. A biologically inspired approach to tracking control of underactuated surface vessels subject to unknown dynamics. Expert Syst. Appl. 2015, 42, 2153–2161. [Google Scholar] [CrossRef]
- Hu, X.; Du, J.L.; Sun, Y.Q. Robust Adaptive Control for Dynamic Positioning of Ships. IEEE J. Ocean. Eng. 2017, 42, 826–835. [Google Scholar] [CrossRef]










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, X.; Wang, G.; Fan, Y. Model Identification and Trajectory Tracking Control for Vector Propulsion Unmanned Surface Vehicles. Electronics 2020, 9, 22. https://doi.org/10.3390/electronics9010022
Sun X, Wang G, Fan Y. Model Identification and Trajectory Tracking Control for Vector Propulsion Unmanned Surface Vehicles. Electronics. 2020; 9(1):22. https://doi.org/10.3390/electronics9010022
Chicago/Turabian StyleSun, Xiaojie, Guofeng Wang, and Yunsheng Fan. 2020. "Model Identification and Trajectory Tracking Control for Vector Propulsion Unmanned Surface Vehicles" Electronics 9, no. 1: 22. https://doi.org/10.3390/electronics9010022
APA StyleSun, X., Wang, G., & Fan, Y. (2020). Model Identification and Trajectory Tracking Control for Vector Propulsion Unmanned Surface Vehicles. Electronics, 9(1), 22. https://doi.org/10.3390/electronics9010022