Abstract
In this paper, the problem of fixed-time consensus tracking for a class of nonlinear multi-agent systems (MASs) with uncertainties and external disturbances is addressed. To solve this problem, a new fixed-time consensus tracking protocol with disturbance rejection abilities is proposed that consists of a fixed-time distributed observer (FTDO), a fixed-time disturbance observer (FDO), and a nonsmooth backstepping controller with lumped disturbance compensation (NBCDC). The fixed-time stabilities are analyzed correspondingly. Firstly, an FTDO is designed to estimate a leader’s output by using the topology of communication networks for each follower. Second, an FDO is developed to observe the lumped disturbances composed of model uncertainties and external disturbances. Finally, an NBCDC is proposed for improving the closed-loop performance. The simulation results show that the proposed method is effective.
1. Introduction
Motivated by increasing military and civilian demands, the cooperative control problems of MASs have attracted increasing attention in both the academic and industrial communities. The cooperative control technology of a multi-agent system has important application prospects in many fields, such as the formation control of robots, posture coordination and formation control of multiple aircraft [1,2,3], internet congestion control [4], and joint attacks of multiple missiles [5]. There are several topics involved in cooperative control technology, such as clustering, formation, and consensus. A fundamental and critical topic in terms of MASs is the leader–follower consensus problem. This problem involves the development of a distributed cooperative protocol that enables all followers to track the output of the leader. Although considerable research has been performed on this topic [6,7], it is challenging to design a protocol with fixed-time convergence and disturbance rejection abilities for nonlinear MASs. As a concentrated expression of traditional control performance specifications, the convergence rate for achieving consensus is critical in practical applications. The synchronization and coordination of UAVs for surveillance or search and rescue operations require efficient consensus tracking to ensure cohesive behavior. Rapid consensus tracking is essential for maintaining safe distances and coordinated movement among multiple vehicles in the context of connected and automated vehicles. In modern energy systems, multi-agent systems that manage energy consumption and distribution must rely on fast consensus tracking to optimize resource allocation and response to demand fluctuations. In the deployment of robotic teams to assist in search and rescue operations, effective consensus tracking enables seamless collaboration in dynamic and uncertain environments. In industrial environments, collaborative robotics working alongside human operators need prompt consensus tracking to ensure safety and efficiency during joint tasks. Therefore, an increasing number of researchers have focused on consensus protocols with specific convergence requirements.
In general, research on fast convergence is performed to enhance the performance and robustness of a system. Similar to the development of control theory, this research objective naturally leads to investigations on asymptotic consensus, finite-time consensus [8], and fixed-time consensus [9,10,11,12] for distributed cooperative control design. The conventional linear distributed protocols [13,14,15,16] only achieve asymptotic stability, implying that consensus is reached when time approaches infinity. A linear consensus protocol for MASs is researched in [17]. The results demonstrate a correlation between the convergence rate and the algebraic connectivity of an interaction graph. Inspired by [17], Kim [18] tried to find a proper interaction topology with a larger algebraic connectivity. The main limitation of asymptotic consensus is that consensus is reached only as time approaches infinity. Furthermore, stability analysis of the consensus protocol cannot be achieved via the “separation principle”.
Subsequently, various finite-time stabilizing control algorithms have been proposed using continuous state feedback and output feedback controllers. Recent advancements in finite-time stabilizing control algorithms highlight the benefits of nonsmooth finite-time controllers, particularly regarding tracking accuracy and disturbance rejection capabilities [19]. The adoption of finite-time consensus strategies in MASs has become increasingly prevalent to address various consensus challenges [20,21,22,23]. The literature has explored the finite-time consensus problem across different dynamics, including both first-order and second-order systems, as well as configurations with unidirectional and intermittent communication links [24,25]. Various approaches have been introduced, such as discontinuous finite-time protocols leveraging signum functions [26] and strategies for leader–follower interactions and switched topologies [27]. Additionally, distributed finite-time attitude containment control for multiple rigid bodies has been addressed [28].
However, the convergence time of finite-time consensus is contingent on the initial states of the agents. As the initial conditions deviate from equilibrium, the convergence time of the finite-time control design notably escalates. Therefore, as an improvement to finite-time consensus, fixed-time consensus was initially introduced and defined in [29,30]. The earliest exploration of fixed-time consensus for MASs can be found in [31], which proposed a nonlinear control protocol to ensure fixed-time convergence for MASs with simple integrator dynamics. Additionally, Zuo and Tie [32] presented a class of nonlinear consensus protocols for MASs, while Fu and Wang [33] enhanced the results in [32] by providing an upper bound estimate for the settling time of MASs with limited input uncertainties. Given the exceptional properties of fixed-time consensus, the primary focus of this paper is on the fixed-time consensus tracking problem for a specific class of nonlinear MASs.
Disturbances exist in a wide number of control systems, such as chemical process systems, mechanical control systems, drone swarms, traffic systems, smart grids, mobile manipulators, and aeroengines, and they negatively affect the performance of the control systems. Therefore, antidisturbance or disturbance rejection is a key topic in high-performance control design [19,34] and also presents a significant challenge in the field of consensus tracking control for MASs. Wang and He [35] presented a leader-following bipartite consensus approach for nonlinear MASs subject to disturbances, introducing new output feedback control protocols and a disturbance observer. In [36], the proposed control strategy ensures that all agents can track a predetermined trajectory within a fixed time, with both the consensus tracking error and disturbance estimation error converging to a small neighborhood around the origin while keeping all signals in the closed-loop system bounded. Yang and Wang [37] utilized neural networks to approximate the nonlinear functions present in MASs. An extended state observer was employed to estimate the unmeasured states and unknown disturbances. Xiong and Gu [38] explored the fixed-time consensus control problem for nonlinear second-order MASs that experience measurement noise. The paper uses the concept of lumped disturbances, which include unmodeled dynamics, parameter perturbations, external disturbances and nonlinear couplings. In traditional control methods, high gain is often used to suppress lumped disturbances, and its drawbacks are obvious. Therefore, we develop a fixed-time disturbance observation for feedforward compensation to improve the closed-loop performance of each follower.
In the references mentioned above [29,30,31,32,33,39] and in the recent work [40], the dynamics of agents in MASs are mostly simple integral series systems and their variants. For a class of nonlinear MASs with uncertainties and external disturbances, there are still some valuable issues to study for the leader–follower consensus problem. There are two main reasons for this situation. First, designing an FTDO for nonlinear MASs is challenging. Second, it is nontrivial to design a nonsmooth backstepping tracking controller with lumped disturbance compensation for each follower. Motivated by the need to solve the aforementioned problems, the main contributions of this paper are summarized as follows:
- For a class of nonlinear MASs with uncertainties and external disturbances, the output of the leader is not available to all followers. An FTDO is designed for each follower to estimate the leader’s output using the topology of communication networks. The fixed-time stability is uniquely analyzed by Lyapunov theory, graph theory, and the mean value theorem.
- As the lumped disturbances represent model uncertainties and external disturbances in each follower, we develop an FDO to rapidly estimate the lumped disturbances. A proof for the fixed-time stability of the FDO is also given based on Lyapunov theory.
- We propose an effective nonsmooth control scheme for command tracking in followers based on an FTDO and an FDO. Since they all converge at a fixed time, we can design them separately. With lumped disturbance feedforward compensation, this NBCDC greatly improves the closed-loop performance.
The subsequent sections of this paper are structured as follows: Section 2 provides essential assumptions and lemmas, followed by the formulation of the problem of fixed-time consensus tracking for a class of nonlinear MASs with uncertainties and external disturbances. In Section 3, the technical details and theoretical proof of the proposed fixed-time consensus tracking protocol are presented. To illustrate the effectiveness of the proposed method, simulations and analyses are conducted in Section 4. Finally, Section 5 concludes the paper.
2. Preliminaries and Problem Formulation
Notation: For any nonnegative real number , the function is defined as for any . We also define and . For any , we define , and . and denote the 2-norm and 1-norm of vector , respectively. Throughout the paper, ⊗ denotes the Kronecker product and denotes a vector with all elements equal to one.
2.1. Lemmas
Consider the system
where and . Suppose the origin is an equilibrium point of (1).
Lemma 1.
According to [30,31], if there exists a continuous, radially unbounded, and positive definite function such that
for some then the origin of the system (1) is globally fixed-time stable. The settling time function T can be approximated by the inequality
Moreover, if and with are chosen, the settling time function T can be estimated by a less conservative bound:
Lemma 2.
In accordance with [32], for and , the following inequalities hold:
2.2. Problem Formulation
Consider a multi-agent system composed of one leader and N followers, labeled as 0 and , respectively. The dynamics of the leader are described as follows:
where represents the state vector, , represents the control input, and represents the control output of the leader. In addition, , are assumed to be continuously differentiable with locally Lipchitz derivatives. The dynamics of the followers are delineated as
where is the state vector of the follower, is the control input of the follower, , denote the mismatching disturbances, represents the matching disturbance, is the output, and denotes the known system model terms. Notably, the disturbances can be considered as unknown lumped disturbances composed of model uncertainties and external disturbances.
It is essential to point out that such strictly feedback nonlinear systems with disturbances can be found in many practical applications, including robot control, aerospace, autonomous vehicles, and unmanned boats. Conducting consensus research on these multi-agent system models would be very meaningful.
Similar to the approach in [41], the communication topology among the N followers can be represented by an edge set of a graph , in which the N followers are depicted by a node set . The adjacency matrix is defined such that if follower i can connect with follower j, and otherwise. In this paper, we assume that and that the topology is undirected. The degree diagonal matrix is denoted by , where for . The graph Laplacian matrix is denoted as . We define the diagonal matrix to represent the interconnection relationship between the leader and followers, where if the follower can obtain the information of the leader, and otherwise.
Assumption 1.
The generalized input of the leader is unknown to any followers, but its upper bound, denoted by , is available to all followers.
Assumption 2.
The graph is connected, and at least one follower in graph is accessible to the states of the leader, denoted as .
The control objective is to devise a fixed-time consensus tracking protocol solely using local information for each follower to achieve fixed-time consensus. In other words, for all initial states , , there should exist a constant such that
3. Fixed-Time Consensus Tracking Protocol
A novel fixed-time consensus tracking protocol with disturbance rejection abilities, which consists of an FTDO, an FDO, and an NBCDC, is detailed in this section.
3.1. Fixed-Time Distributed Observer
Since the leader’s state information is available only to some followers rather than all, we are inspired by [41] to design an observer for system (2). This allows each follower to observe the output of the leader within a fixed time. The estimate of the leader’s state is denoted by , where for the follower, . The FTDO is designed as follows:
The observation errors are defined as follows:
Let for . We can express the above formula more concisely as
The mean value theorem of multivariable functions is employed here, where and are vectors between and that satisfy the following conditions:
Theorem 1.
Assuming that Assumptions 1 and 2 hold, and the observer parameters are in compliance with the requirements
where , then the observation errors of the distributed observer (4) converge to zero in a fixed time, which is bounded by
Remark 1.
For the proof of stability, please refer to our published paper [42]. Unlike the distributed observers utilized in [41,43], which treat the nonlinear terms as bounded lumped disturbances and eliminate them using the sign function with a large gain, our approach fully utilizes the observed state information and the network topology structure to construct the adaptive gain “”. This adaptive gain decreases to zero when the observation errors converge to zero. Therefore, our proposed observer (4) removes the requirement for knowledge of the upper bound of the nonlinear terms and alleviates the inherent chattering issue of high-gain sliding mode control.
3.2. Fixed-Time Disturbance Observer
Inspired by [44,45], an FDO is introduced to estimate the lumped disturbance using the sliding mode technique. The FDO for estimating the lumped disturbances is expressed as
where , , and , satisfy that , , and and for sufficiently small , . The observer gains are assigned such that the matrices and are Hurwitz:
observer variables , () represent the observations of .
Theorem 2.
Given strict feedback affine nonlinear uncertain systems (3), the observation errors of the FDO (6) and (7) for lumped disturbances and their derivatives converges to the neighborhood of the origin within a fixed time, and the convergence time is expressed as
where , , , , positive real number , positive definite matrix , and , satisfy and .
Proof.
Defining and combining (6) and (7) with (3), we can derive the dynamical equation of the estimation errors as
The following proof process is consistent with Theorem 1 in [45], which is omitted here for brevity. According to [44,45], the observation errors in Equation (8) converge to a neighborhood of the origin within a fixed time. Furthermore, there exits a fixed time , independent of the initial observation errors, such that when , , () converges to a neighborhood of , i.e., . □
Remark 2.
The total upper bound convergence time for the ith follower, considering all lumped disturbances , can be calculated in two modes. In serial mode, is the sum of individual convergence times for each disturbance. In parallel mode, is determined by the maximum value among all individual convergence times .
3.3. Nonsmooth Backstepping Controller with Lumped Disturbance Compensation
3.3.1. Nonsmooth Backstepping Controller Design
For the () follower, we propose an effective control scheme for command tracking. In this NBCDC, the follower receives the tracking command from the leader through the FTDO and obtains estimates of the lumped disturbances through the FDO.
Define the state tracking error as and filtering error as , where i denotes the ith follower and j denotes the jth state variable. The process for designing the controller is as follows.
Step 1: In order to enable the state to track , we consider as an intermediate virtual control input. As a result, the dynamics of can be expressed as
where is the derivative of , which is observed by the FTDO.
Then, the stabilization function, which is denoted by the desired intermediate control input , can be formulated as
where , , are positive gains and .
We design the first nonsmooth command filter as
Obviously, the dynamic of is
where the filter parameter is a time constant, and , , and are appropriate positive gains. We suppose that is bounded and there exists a known positive constant satisfying that .
Combining with yields
Step j: We treat as an intermediate virtual control input to make track . The dynamics of are expressed as
Subsequently, the desired intermediate control input can be formulated as
where , , and are positive gains.
Subsequently, we design the nonsmooth command filter as
the dynamics of are
where the filter parameter is a time constant, and , , and are appropriate positive gains. We suppose that is bounded and there exists a known positive constant satisfying that .
Combining with yields
Step n: Differing from above, the dynamics of is
To make state track , we design the control law as follows:
where and are positive gains.
3.3.2. Stability Analysis
Theorem 3.
For the strict feedback affine nonlinear system with disturbances described by Equation (3), we can obtain its closed loop form based on (10), (13), and (16) as follows:
If the control gains satisfy
the tracking errors and filtering errors of the closed-loop system will all converge to a small neighborhood near the origin within a fixed time , independent of their initial errors.
Proof.
The following Lyapunov function is selected for stability analysis:
Obviously, if and hold, . The time derivative of (17) is
where is positive and bounded and the Lemma A.2 appearing in [46] is used.
Based on Lemma 2, we can derive
According to (18), we can easily see that the Lyapunov function will not diverge to infinity within a finite time . When , can be guaranteed by Theorem 2.
Define as the error vector of the closed-loop system. Theorem 2 in [45] and Lemma 1 thus guarantee that the error vector converges to an arbitrarily small neighborhood of the origin:
When , the inequality (18) becomes
The convergence time is bounded by a constant, as given by Equation (20)
It is evident from Equation (20) that the upper boundary of the convergence time is independent of the initial tracking and filtering errors. This concludes the proof. □
4. Simulation Results
In this section, we verify the effectiveness of the proposed fixed-time consensus tracking control protocol with disturbance rejection abilities.
The following second-order nonlinear systems [11] are used to demonstrate the effectiveness of the proposed fixed-time consensus tracking protocol. The MASs utilized in the simulation consist of one leader and five followers.
The leader’s model is
The models of the five followers are
where , and represent the two states and control input of the leader, and , and represent the states and control inputs of the five followers, respectively. represent mismatching disturbances, while represents matching disturbances in the five followers, in which the coefficient takes the values 0.1, 0.2, 0.3, 0.4, and 0.5, sequentially. During the simulation process, the backstepping method is used to enable the leader to output the expected sine and step trajectories for control.
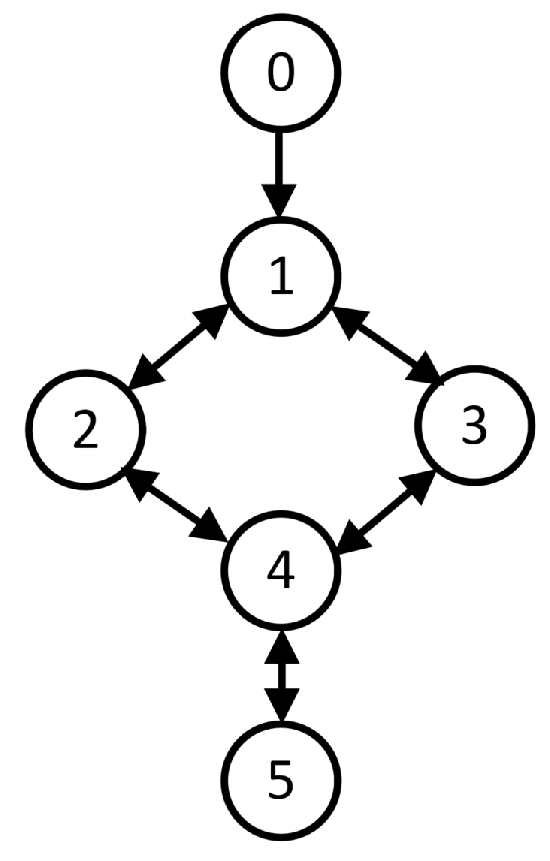
For the MASs example, which consists of one leader and five followers, the communication topology between the leader and followers is shown in Figure 1. The Laplacian matrix corresponding to this network topology is
the leader accessibility matrix is and can be calculated as 0.1338.
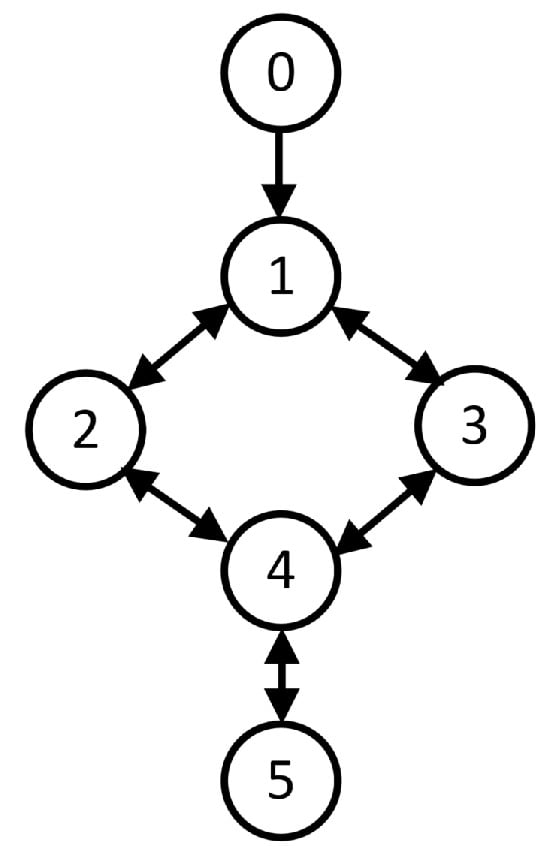
Figure 1.
Information flow between the leader and followers in MASs.
To demonstrate the tracking performance of the proposed method, two types of tracking scenarios are provided. In scenario 1, the leader outputs a sinusoidal command, and in scenario 2, the leader outputs the step command. At the same time, two different initial states are set for each scenario:
where , is the initial states of the agents and , denotes the initial states of the FTDO.
In scenario 1, the sinusoidal command is
The matching disturbance applied to all five followers is given by , while the mismatching disturbance is expressed as . Here, represents the external disturbance and accounts for the model uncertainty.
Remark 3.
The parameters of the FTDO in all five followers are selected as , , and . The parameters of the FDO are , , and . The parameters of the NBCDCs in all five followers are , , , , , and . The simulation is conducted utilizing the Euler method with a fixed step of s. The selection of the observer gain parameter for the FTDO is based on the equality and inequality constraints presented in Theorem 1. However, excessively high gains can cause oscillations in the observed values, reducing the accuracy of the distributed observer, which in turn may lead to discrepancies between the tracking commands of the followers and the actual trajectory of the leader. The observer parameters for the FDO must satisfy the Hurwitz conditions for matrices and in Theorem 2, while also considering the convergence time. For the NBCDC, the selection of the control gain must fulfill the equality and inequality constraints outlined in Theorem 3. Similarly, overly high gains can have detrimental effects on the closed-loop system, such as causing the control action to exceed the saturation limits of the actuators, thereby degrading control quality.
In scenario 2, the command is
The matching disturbances, mismatching disturbances, and the parameters of the FTDO, FDO, and NBCDC, except for , and , are all the same as those in scenario 1. Before the given command is passed to the leader, it goes through a low-pass filter with a transfer function of to enable a smooth transition process.
In order to compare and analyze the performances of the aforementioned methods, the ITAE index is utilized as the control performance specification in this paper. The ITAE index is defined as , where represents the tracking error and is the simulation time.
The performance of the proposed NBCDC and the comparative nonsmooth backstepping controller (NBC) without lumped disturbance compensation are presented in Table 1. The simulation results are depicted in Figure 2, Figure 3, Figure 4 and Figure 5.

Table 1.
ITAE indexes in NBCDC and NBC.
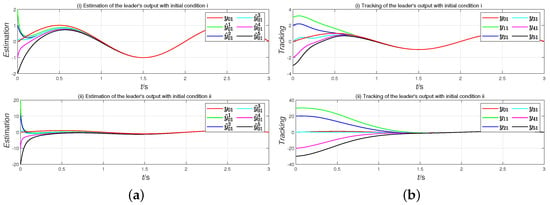
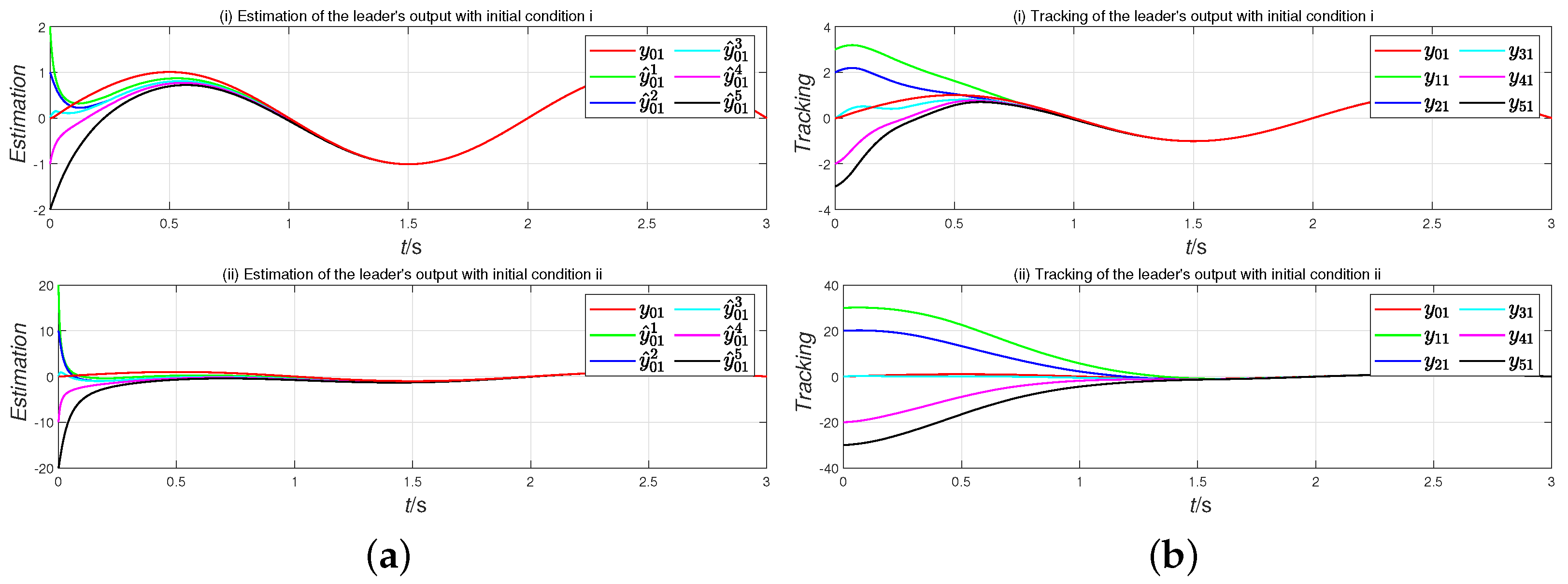
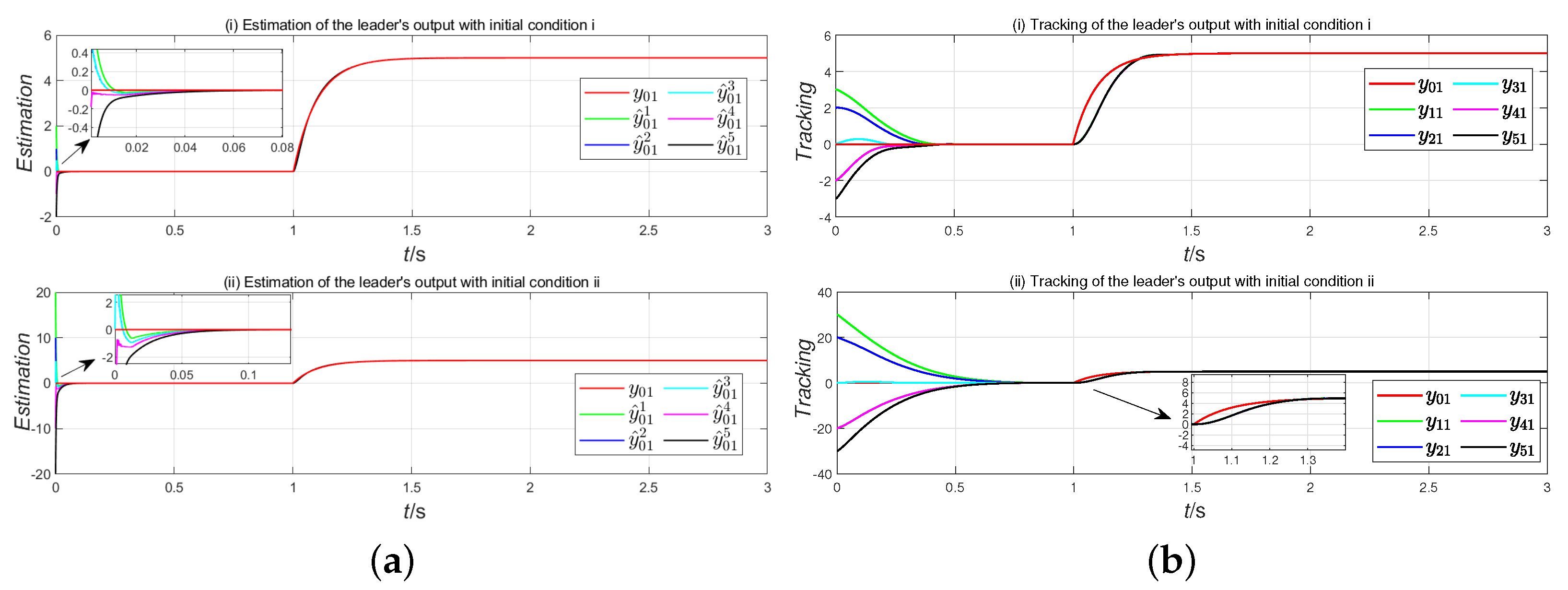
Figure 2.
(a) Estimation of the leader’s output with different initial conditions (scenario 1); (b) tracking of the leader’s output with different initial conditions (scenario 1).
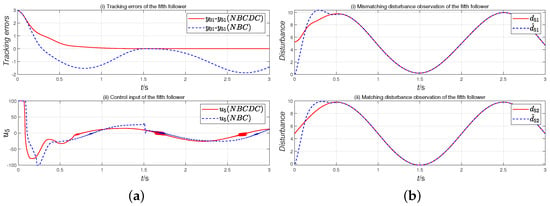
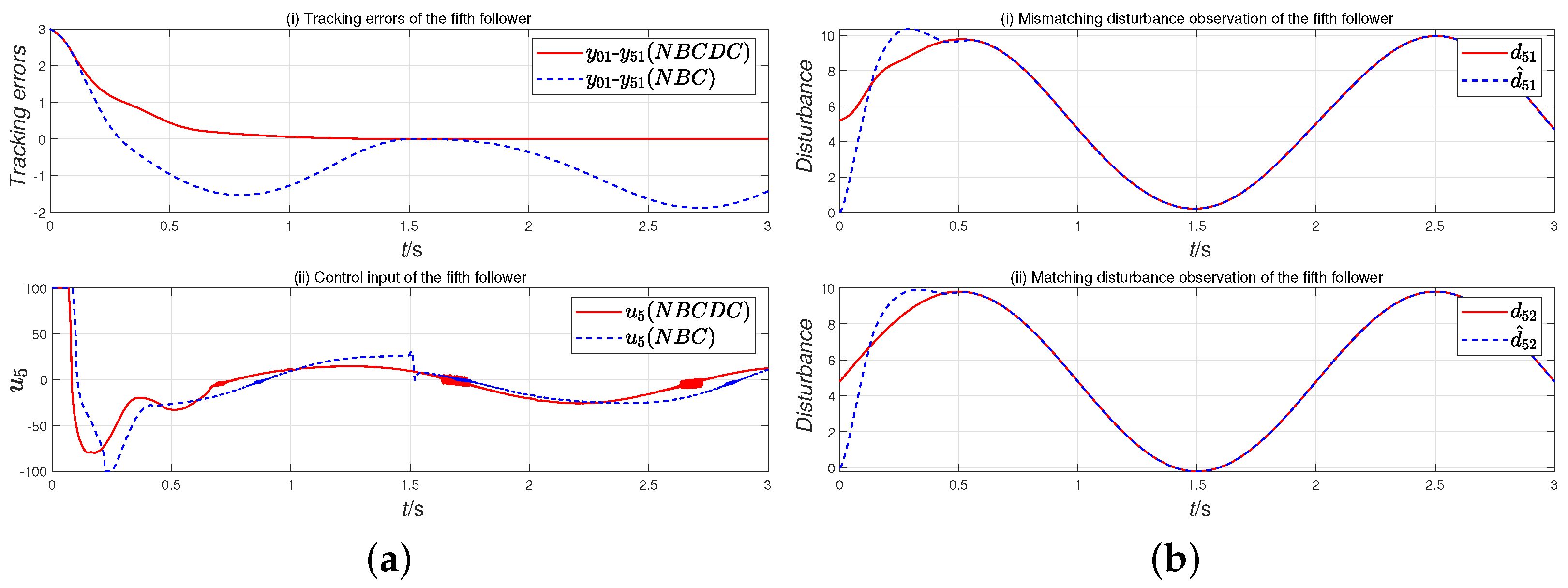
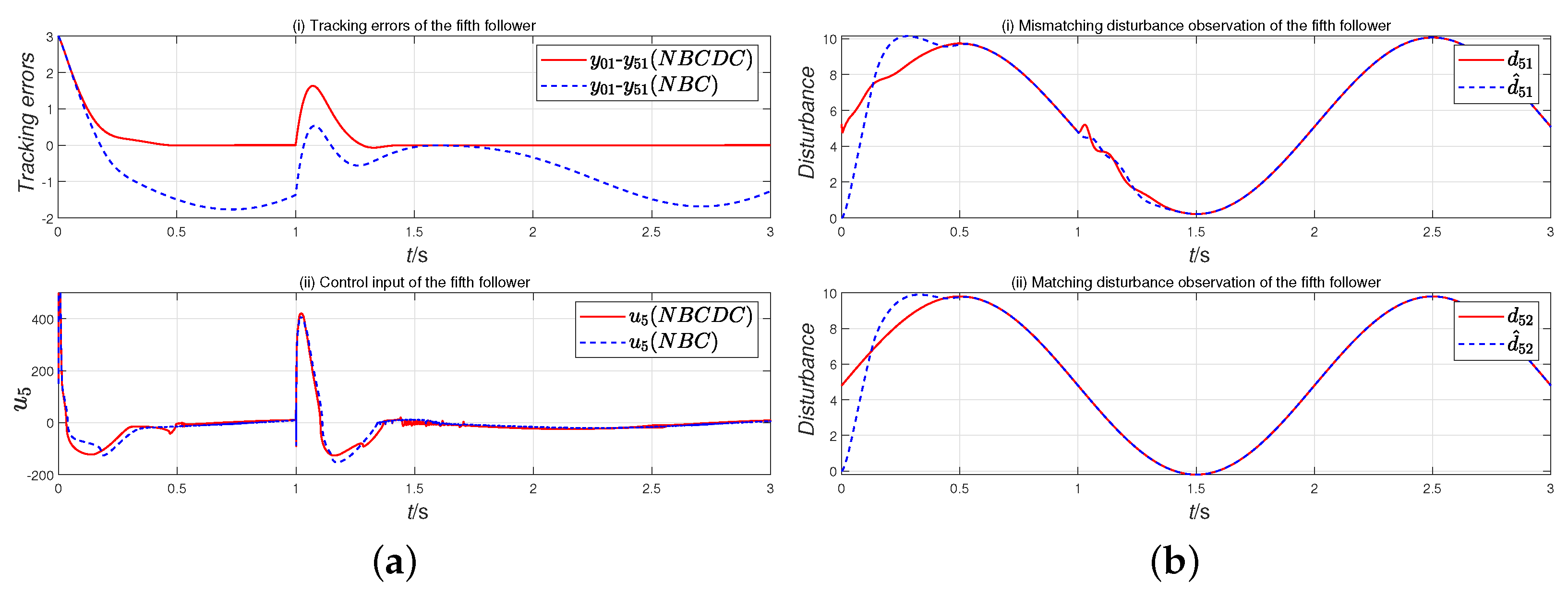
Figure 3.
(a) Tracking errors (i) and control input (ii) of the fifth follower (scenario 1); (b) disturbance observation of the fifth follower (scenario 1).
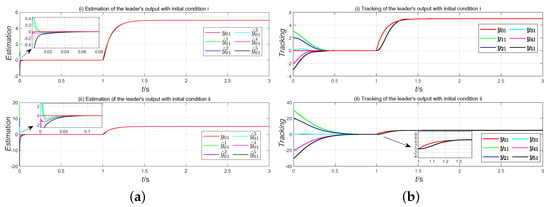
Figure 4.
(a) Estimation of the leader’s output with different initial conditions (scenario 2); (b) tracking of the leader’s output with different initial conditions (scenario 2).
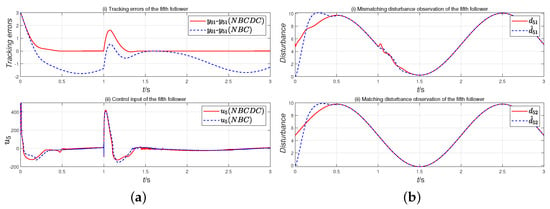
Figure 5.
(a) Tracking errors (i) and control input (ii) of the fifth follower (scenario 2); (b) disturbance observation of the fifth follower (scenario 2).
Remark 4.
In scenario 1 and scenario 2, we choose follower 5 as a representative example. The remaining followers exhibit similar behavior to these given examples. Due to space constraints, we cannot provide further elaboration here. Figure 2a and Figure 4a demonstrate that the distributed state observer achieves fixed-time convergence within 1.5 s regardless of the initial conditions of the FTDO, thus confirming the validity of Theorem 1.
Remark 5.
Remark 6.
Figure 3a and Figure 5a show that the proposed controller adeptly tracks the desired trajectory for the specified commands in the initial states (i) by utilizing the NBCDC. Furthermore, relative to the method lacking disturbance compensation (NBC), the proposed controller’s control performance is significantly enhanced with approximate control inputs. The performance specifications of all followers are detailed in Table 1, providing comprehensive evidence for the validity of Theorem 3.
5. Conclusions
In this paper, we address the fixed-time consensus tracking problem for a class of MASs with dynamics in the form of strict feedback affine nonlinearities. A novel fixed-time consensus tracking protocol with disturbance rejection abilities is introduced. The protocol consists of an FTDO, an FDO, and an NBCDC. The novel FTDO converges rapidly within a fixed time to estimate the output from the leader. The FDO can quickly observe lumped disturbances. The designed nonsmooth backstepping controller with lumped disturbance compensation can also achieve fixed-time convergence. The fixed-time stability is conducted based on Lyapunov theory. The simulation results demonstrate that the proposed method is effective.
Author Contributions
Validation, X.H.; Writing—original draft, G.C.; Writing—review & editing, G.X.; Funding acquisition, X.T. All authors have read and agreed to the published version of the manuscript.
Funding
The authors acknowledge the financial support from the National Natural Science Foundation of China under Grant 62477045, the Beijing Natural Science Foundation under Grant L241007, the National Science and Technology Major Project under Grant J2019-V-0014-0109, and the Strategic Priority Research Program of the Chinese Academy of Sciences, Grant No. XDB0860000.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Dong, W.; Farrell, J.A. Cooperative Control of Multiple Nonholonomic Mobile Agents. IEEE Trans. Autom. Control. 2008, 53, 1434–1448. [Google Scholar] [CrossRef]
- Dong, W.; Farrell, J.A. Decentralized cooperative control of multiple nonholonomic dynamic systems with uncertainty. Automatica 2009, 45, 706–710. [Google Scholar] [CrossRef]
- Li, S.; Du, H.; Lin, X. Finite-time consensus algorithm for multi-agent systems with double-integrator dynamics. Automatica 2011, 47, 1706–1712. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Trans. Autom. Control. 2006, 51, 401–420. [Google Scholar] [CrossRef]
- Jeon, I.; Lee, J.; Tahk, M. Homing guidance law for cooperative attack of multiple missiles. J. Guid. Control. Dyn. 2010, 33, 275–280. [Google Scholar] [CrossRef]
- Wang, A.; Liu, L.; Qiu, J.; Feng, G. Leader-Following Consensus of Multiple Uncertain Euler–Lagrange Systems via Fully Distributed Event-Triggered Adaptive Fuzzy Control. IEEE Trans. Cybern. 2024, 54, 76–86. [Google Scholar] [CrossRef]
- Li, K.; Ding, S.X.; Zheng, W.X.; Hua, C.-C. Global Distributed Fault-Tolerant Consensus Control of Nonlinear Delayed Multiagent Systems With Hybrid Faults. IEEE Trans. Autom. Control. 2024, 69, 1967–1974. [Google Scholar] [CrossRef]
- Zeng, S.; Doan, T.T.; Romberg, J. Finite-Time Convergence Rates of Decentralized Stochastic Approximation with Applications in Multi-Agent and Multi-Task Learning. IEEE Trans. Autom. Control. 2023, 68, 2758–2773. [Google Scholar] [CrossRef]
- Mi, W.; Luo, L.; Zhong, S. Fixed-Time Consensus Tracking for Multi-Agent Systems With a Nonholomonic Dynamics. IEEE Trans. Autom. Control. 2023, 68, 1161–1168. [Google Scholar] [CrossRef]
- Wu, W.; Tong, S. Observer-Based Fixed-Time Adaptive Fuzzy Consensus DSC for Nonlinear Multi-agent Systems. IEEE Trans. Cybern. 2023, 53, 5881–5891. [Google Scholar] [CrossRef]
- Hou, H.-Q.; Liu, Y.-J.; Lan, J.; Liu, L. Adaptive Fuzzy Fixed Time Time-Varying Formation Control for Heterogeneous Multiagent Systems With Full State Constraints. IEEE Trans. Fuzzy Syst. 2023, 31, 1152–1162. [Google Scholar] [CrossRef]
- Guo, W.; Shi, L.; Sun, W.; Jahanshahi, H. Predefined-Time Average Consensus Control for Heterogeneous Nonlinear Multi-Agent Systems. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 2989–2993. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R. Consensus seeking in multi-agent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control. 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Li, Z.; Duan, Z.; Chen, G.; Huang, L. Consensus of multi-agent systems and synchronization of complex networks: A unified viewpoint. IEEE Trans. Circuits Syst.-I Regul. Pap. 2010, 57, 213–224. [Google Scholar]
- Yu, W.; Chen, G.; Cao, M. Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems. Automatica 2010, 46, 1089–1095. [Google Scholar] [CrossRef]
- Ding, Z. Consensus disturbance rejection with disturbance observers. IEEE Trans. Ind. Electron. 2015, 62, 5829–5837. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time delays. IEEE Trans. Autom. Control. 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Kim, Y.; Mesbahi, M. On maximizing the second smallest eigenvalue of a state-dependent graph laplacian. IEEE Trans. Autom. 2006, 51, 116–120. [Google Scholar] [CrossRef]
- Sun, J.; He, H.; Yi, J.; Pu, Z. Finite-Time Command-Filtered Composite Adaptive Neural Control of Uncertain Nonlinear Systems. IEEE Trans. Cybern. 2022, 52, 6809–6821. [Google Scholar] [CrossRef]
- Zuo, Z.; Han, Q.-L.; Ning, B.; Ge, X.; Zhang, X. An overview of recent advances in fixed-time cooperative control of multi-agent systems. IEEE Trans. Ind. Informat. 2018, 14, 2322–2334. [Google Scholar] [CrossRef]
- Bhat, S.; Bernstein, D. Finite time stability of continuous autonomous systems. SIAM J. Control. Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Zhao, Y.; Duan, Z.; Wen, G.; Chen, G. Distributed finite-time tracking of multiple non-identical second-order nonlinear systems with settling time estimation. Automatica 2016, 64, 86–93. [Google Scholar] [CrossRef]
- Cortes, J. Finite-time convergent gradient flows with applications to network consensus. Automatica 2006, 42, 1993–2000. [Google Scholar] [CrossRef]
- Xiao, F.; Wang, L.; Chen, T. Finite-time consensus of multi-agent systems with directed and intermittent links. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 22–24 July 2011; pp. 6539–6543. [Google Scholar]
- Wang, X.; Hong, Y. Finite-time consensus for multi-agent networks with second-order agent dynamics. IFAC Proc. 2008, 41, 15185–15190. [Google Scholar] [CrossRef]
- Chen, F.; Cao, Y.; Ren, W. Distributed Average Tracking of Multiple Time-Varying Reference Signals With Bounded Derivatives. IEEE Trans. Autom. Control. 2012, 57, 3169–3174. [Google Scholar] [CrossRef]
- Guan, Z.; Sun, F.; Wang, Y.; Li, T. Finite-time consensus for leader following second-order multi-agent networks. IEEE Trans. Circuits Syst. I Reg. Pap. 2012, 59, 2646–2654. [Google Scholar] [CrossRef]
- Meng, Z.; Ren, W.; You, Z. Distributed finite-time attitude containment control for multiple rigid bodies. Automatica 2010, 46, 2092–2099. [Google Scholar] [CrossRef]
- Andrieu, V.; Praly, L.; Astolfi, A. Homogeneous approximation, recursive observer design and output feedback. SIAM J. Control. Optim. 2008, 47, 1814–1850. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control. 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Parsegov, S.; Polyakov, A.; Shcherbakov, P. Fixed-time consensus algorithm for multi-agent systems with integrator dynamics. In Proceedings of the 4th IFAC Workshop on Distributed Estimation and Control in Networked Systems, Koblenz, Germany, 25–26 September 2013; pp. 110–115. [Google Scholar]
- Zuo, Z. Non-singular fixed-time consensus tracking for second-order multi-agent networks. Automatica 2015, 54, 305–309. [Google Scholar] [CrossRef]
- Fu, J.; Wang, J. Fixed-time coordinated tracking for second-order multi-agent systems with bounded input uncertainties. Syst. Control. Lett. 2016, 93, 1–12. [Google Scholar] [CrossRef]
- Sun, J.; Yi, J.; Pu, Z.; Liu, Z. Fixed-Time Adaptive Fuzzy Control for Uncertain Nonstrict-Feedback Systems with Time-Varying Constraints and Input Saturations. IEEE Trans. Fuzzy Syst. 2022, 30, 1114–1128. [Google Scholar] [CrossRef]
- Wang, Q.; He, W.; Zino, L.; Tan, D.; Zhong, W. Bipartite consensus for a class of nonlinear multi-agent systems under switching topologies: A disturbance observer-based approach. Neurocomputing 2022, 488, 130–143, ISSN 0925-2312. [Google Scholar] [CrossRef]
- Zhang, N.; Xia, J.; Park, J.H.; Zhang, J.; Shen, H. Improved disturbance observer-based fixed-time adaptive neural network consensus tracking for nonlinear multi-agent systems. Neural Netw. 2023, 162, 490–501, ISSN 0893-6080. [Google Scholar] [CrossRef]
- Yang, M.; Wang, Z.; Yu, D.; Wang, Z.; Liu, Y.J. Extended state observer-based non-singular practical fixed-time adaptive consensus control of nonlinear multi-agent systems. Nonlinear Dyn. 2023, 111, 10097–10111. [Google Scholar] [CrossRef]
- Xiong, T.; Gu, Z. Observer-Based Fixed-Time Consensus Control for Nonlinear Multi-Agent Systems Subjected to Measurement Noises. IEEE Access 2020, 8, 174191–174199. [Google Scholar] [CrossRef]
- Zuo, Z.; Tie, L. Distributed robust finite-time nonlinear consensus protocols for multi-agent systems. Int. J. Syst. Sci. 2016, 47, 1366–1375. [Google Scholar] [CrossRef]
- Huang, N.; Liu, D.; Sun, Z.; Duan, Z.; Lu, Q.; Chen, Z. Distributed Consensus Seeking With Different Convergence Performance Requirements: A Unified Control Framework. IEEE Trans. Cybern. 2023, 53, 5483–5496. [Google Scholar] [CrossRef]
- Zuo, Z.; Tian, B.; Defoort, M.; Ding, Z. Fixed Time Consensus Tracking for Multiagent Systems With High-Order Integrator Dynamics. IEEE Trans. Autom. Control. 2018, 63, 563–570. [Google Scholar] [CrossRef]
- Tan, X.; Hu, C.; Cao, G.; Wei, Q.; Li, W.; Han, B. Fixed-Time Antidisturbance Consensus Tracking for Nonlinear Multiagent Systems with Matching and Mismatching Disturbances. IEEE/CAA J. Autom. Sin. 2024, 11, 1410–1423. [Google Scholar] [CrossRef]
- Shi, S.; Xu, S.; Liu, W.; Zhang, B. Global Fixed-Time Consensus Tracking of Nonlinear Uncertain Multiagent Systems With High-Order Dynamics. IEEE Trans. Cybern. 2020, 50, 1530–1540. [Google Scholar] [CrossRef] [PubMed]
- Basin, M.; Yu, P.; Shtessel, Y. Finite- and fixed-time differentiators utilizing HOSM techniques. IET Control. Theory Appl. 2017, 11, 1144–1152. [Google Scholar] [CrossRef]
- Sun, J.; Pu, Z.; Yi, J.; Liu, Z. Fixed-Time Control With Uncertainty and Measurement Noise Suppression for Hypersonic Vehicles via Augmented Sliding Mode Observers. IEEE Trans. Ind. Inform. 2020, 16, 1192–1203. [Google Scholar] [CrossRef]
- Qian, C.; Lin, W. A continuous feedback approach to global strong stabilization of nonlinear systems. IEEE Trans. Autom. 2001, 46, 1061–1079. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).