
Fast Screening Algorithm for Satellites Based on Multi-Constellation System

Abstract
1. Introduction
2. Analysis of Satellite Selection Algorithms in Satellite Positioning System
2.1. Single-Point Position in Multi-Constellation Satellite Position System
2.2. GDOP Values for Multi-System Satellite Position System
3. Fast Satellite Screening Algorithm Based on Multi-Threshold Optimization
3.1. Satellite Elevation Angle and Carrier-to-Noise Ratio Modeling
3.2. Modeling the Relationship between GDOP Values and Star Selection Ratios
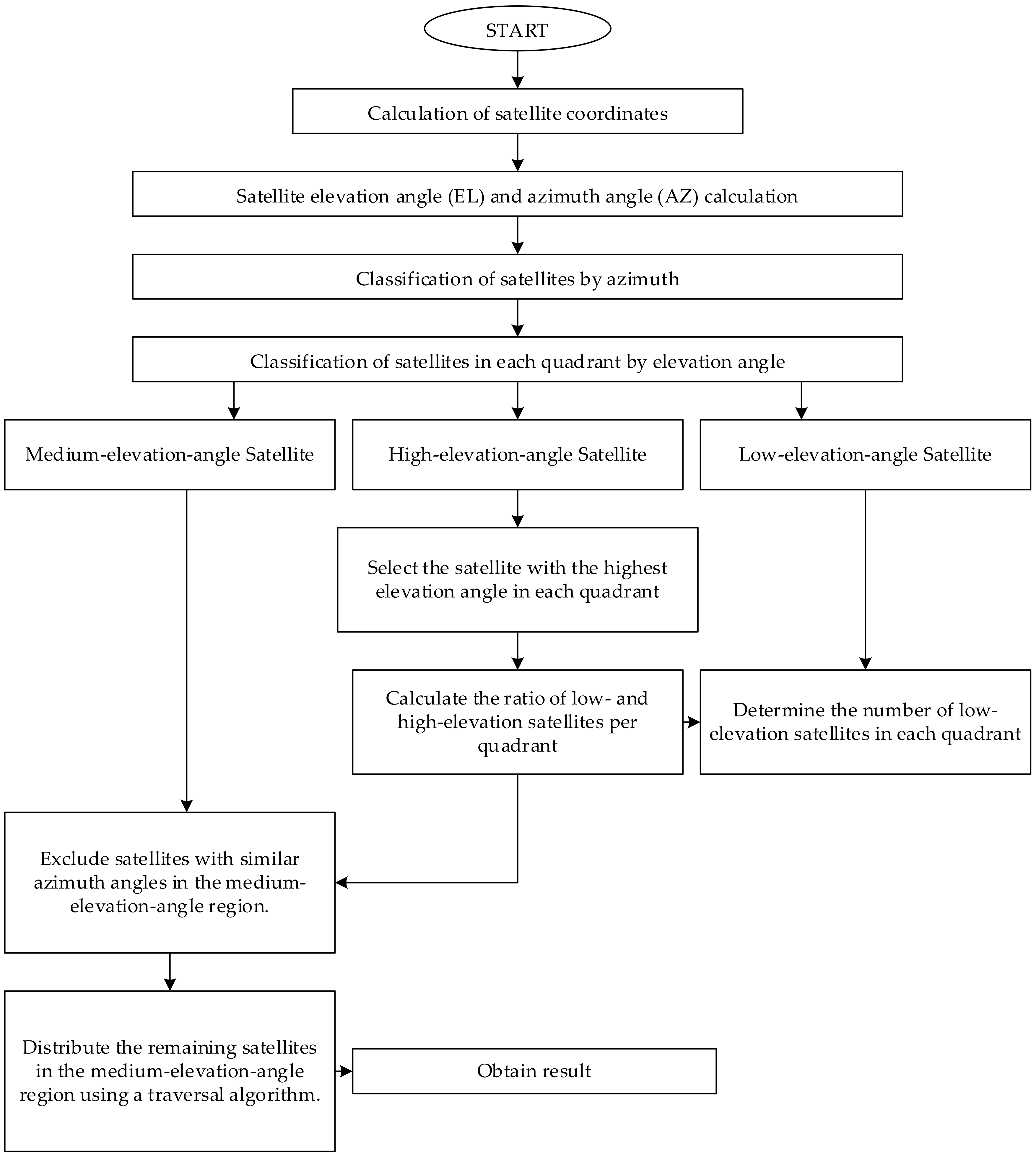
3.3. Fast Satellite Selection Algorithm Based on Spatial Zoning
- The elevation angles of visible stars are divided into three regions: 5~30°, 30~60°, and 60~90°,which are called the low-elevation-angle region, medium-elevation-angle-region, and high-elevation-angle region, respectively, and the number of satellites in the high-elevation-angle region and the low-elevation-angle region are calculated as , , and their ratios, so that we can obtain the distribution information of the elevation angles of the visible stars as a whole.
- We determined the number of satellites in the low-elevation region based on the ratio of low-elevation and high-elevation satellites in each quadrant and distributed the remaining satellites evenly in different elevation quadrants [16]. The remaining satellites were evenly distributed in different elevation quadrants, and the remaining satellites were selected by the permutation algorithm.
- With the satellite receiver as the center of the circle, the sky is divided into four quadrants according to the satellite azimuth angles as (0°,90°), (90°,180°), (180°,270°), and (270°,360°), and the satellite with the largest spatial elevation angle in each quadrant is selected as the first of four satellites in the star selection strategy. For the remaining visible stars, sorting is performed according to the azimuth angle, and the azimuth difference between the two satellites before and after is calculated in turn. If the azimuth angle of two satellites is too close, one of them is excluded based on the overall observable satellite elevation angle, and the other satellite information can largely ensure that the volume of the polyhedron composed of all satellites and receivers is kept as constant as possible.
4. Experimental Validation and Result Analysis
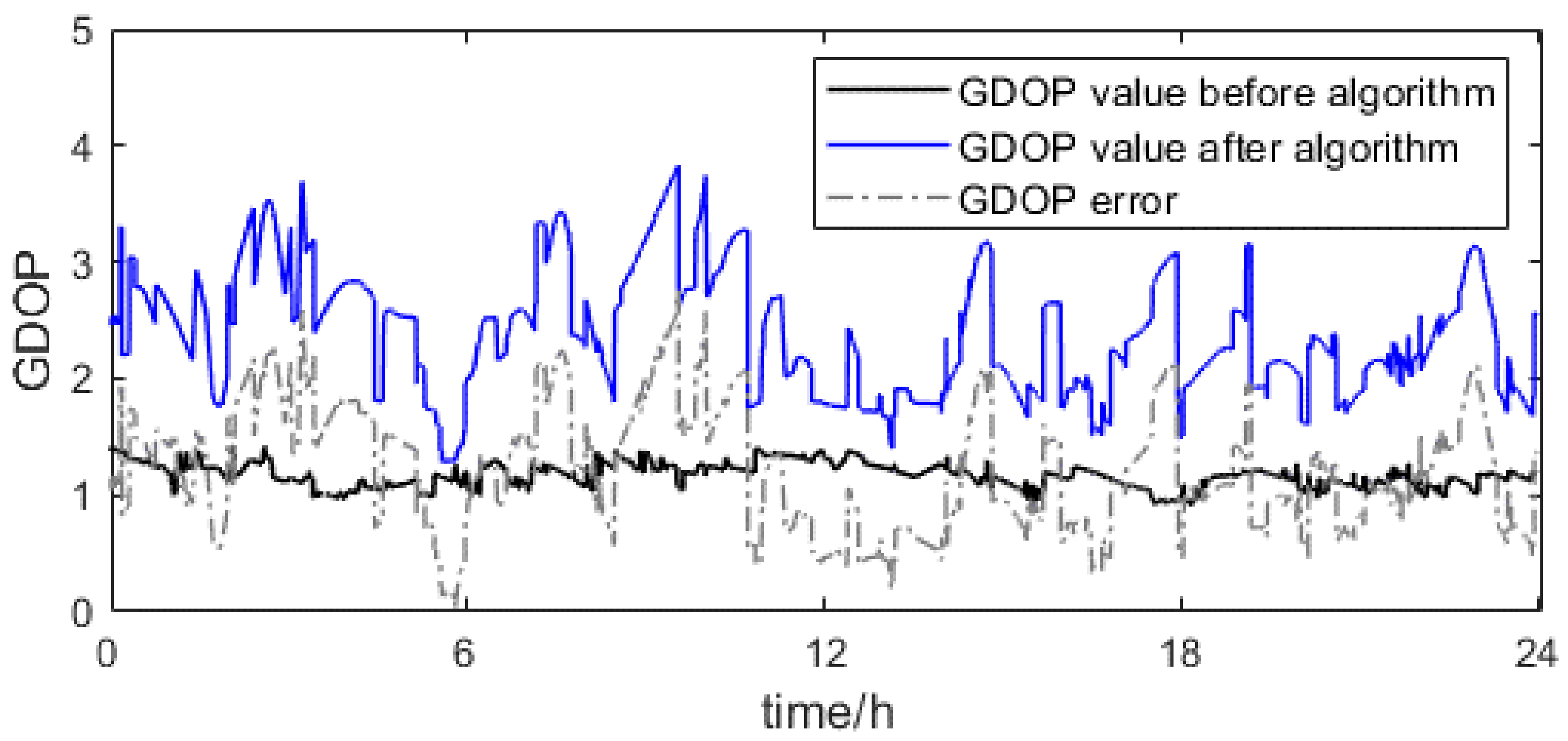
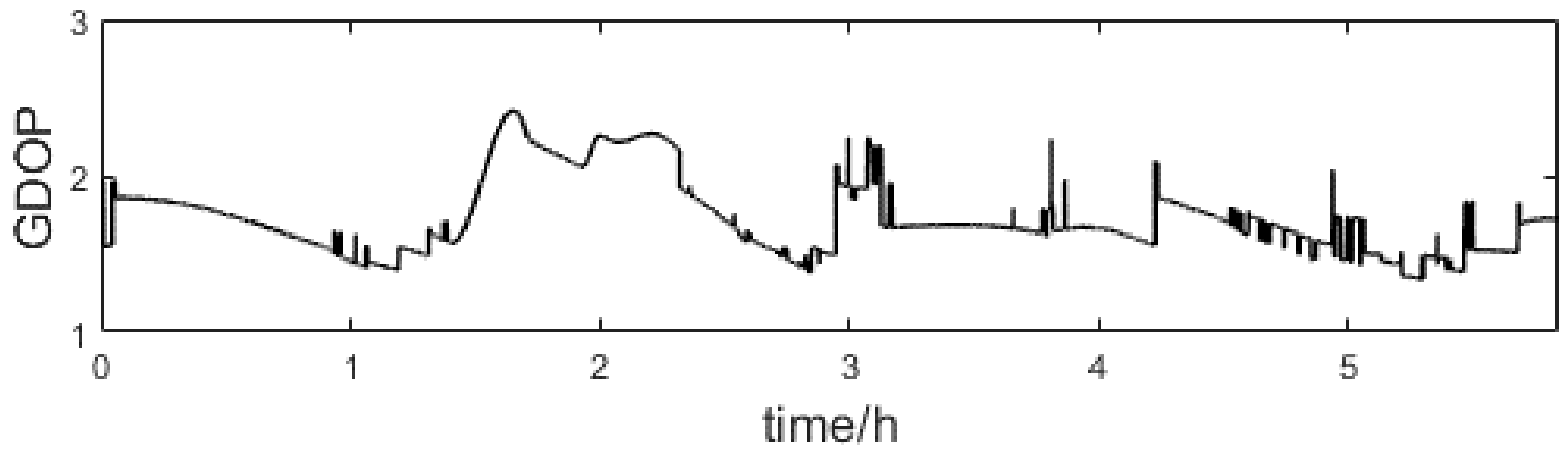
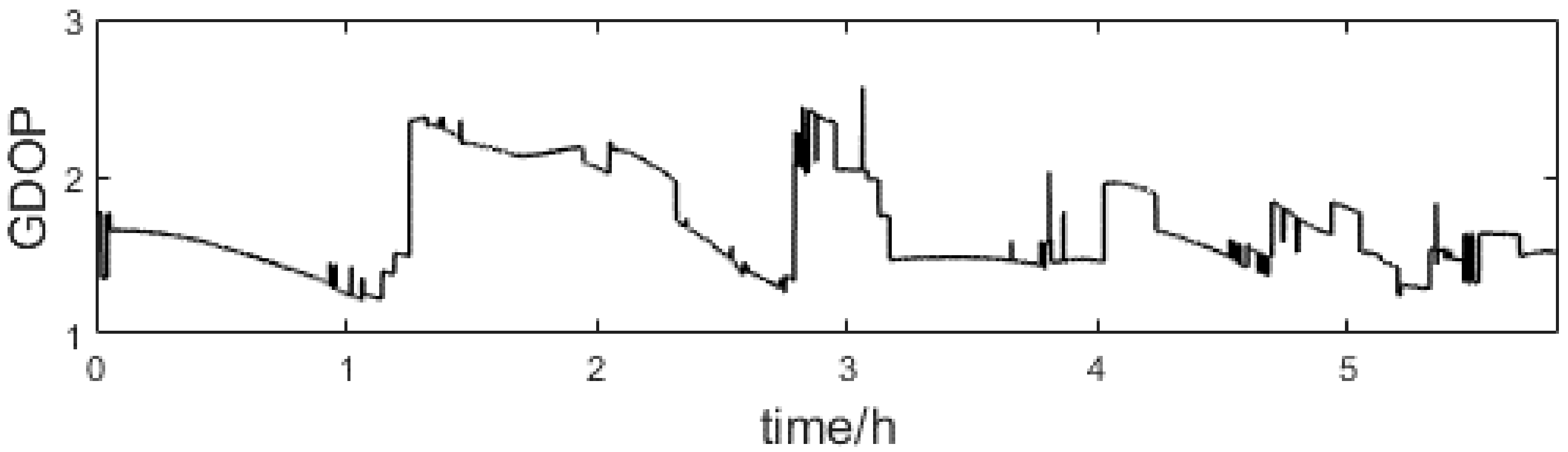
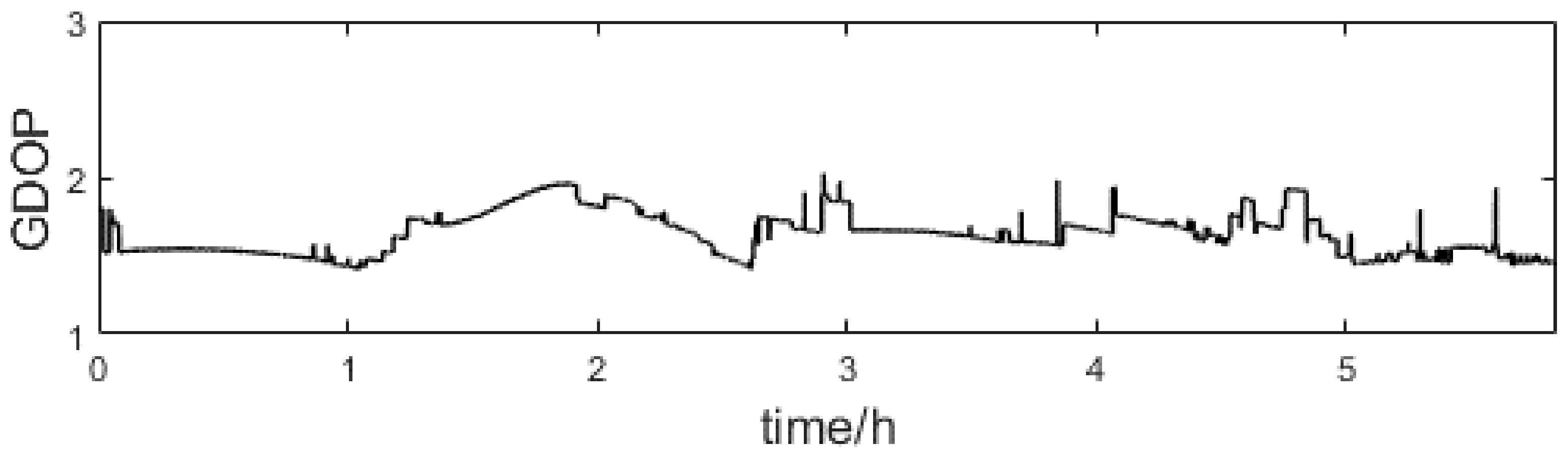
4.1. GDOP Values of Fast Satellite Screening Algorithms
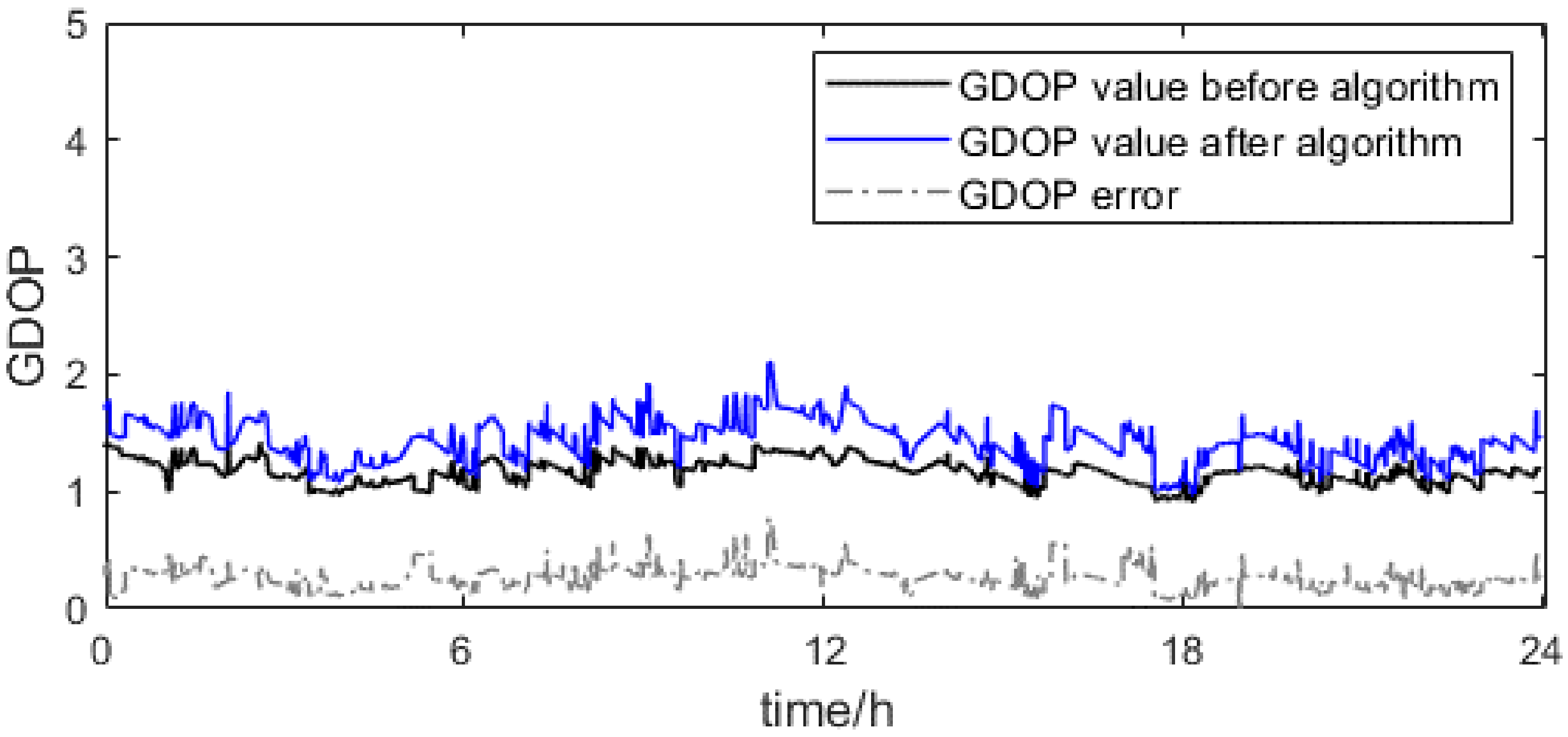
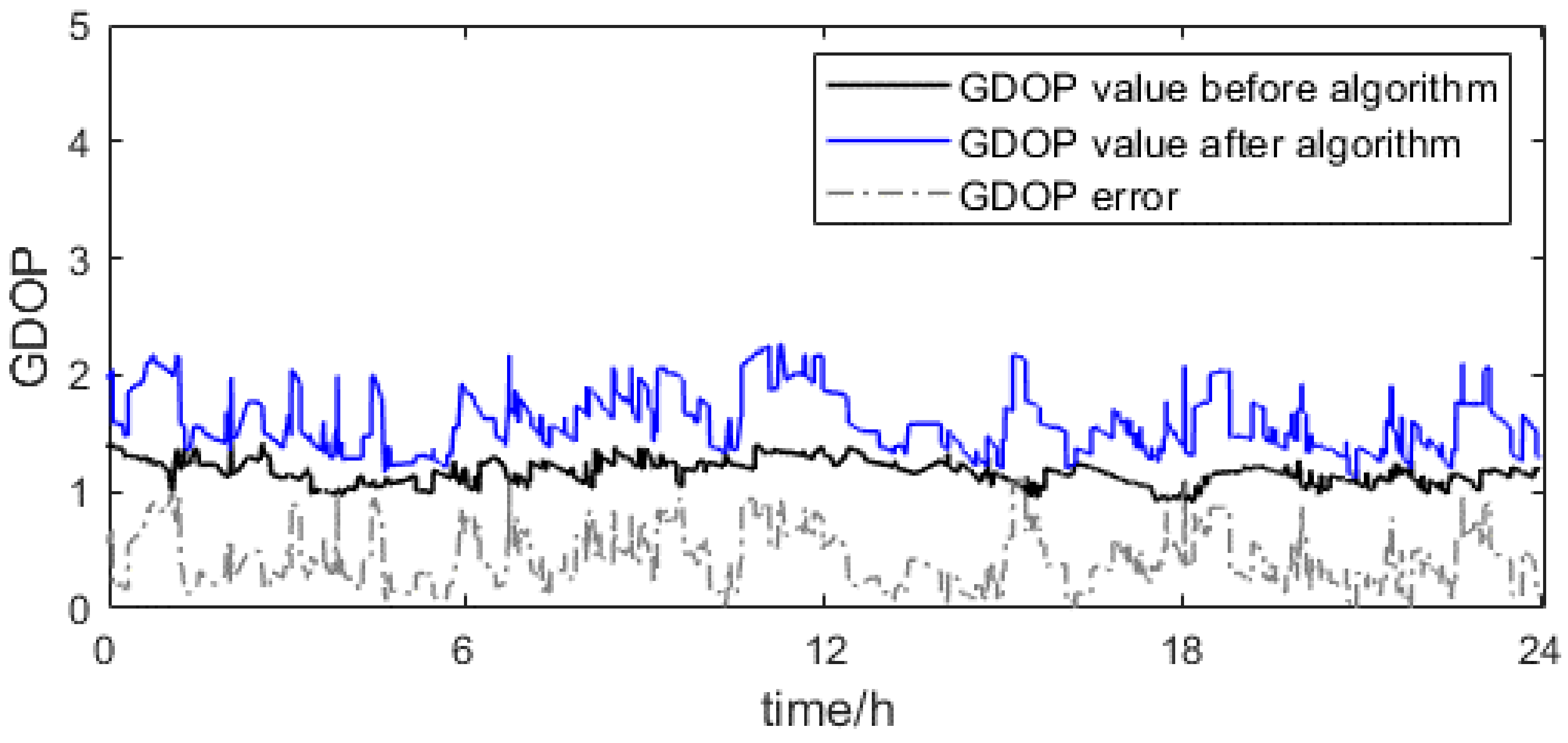
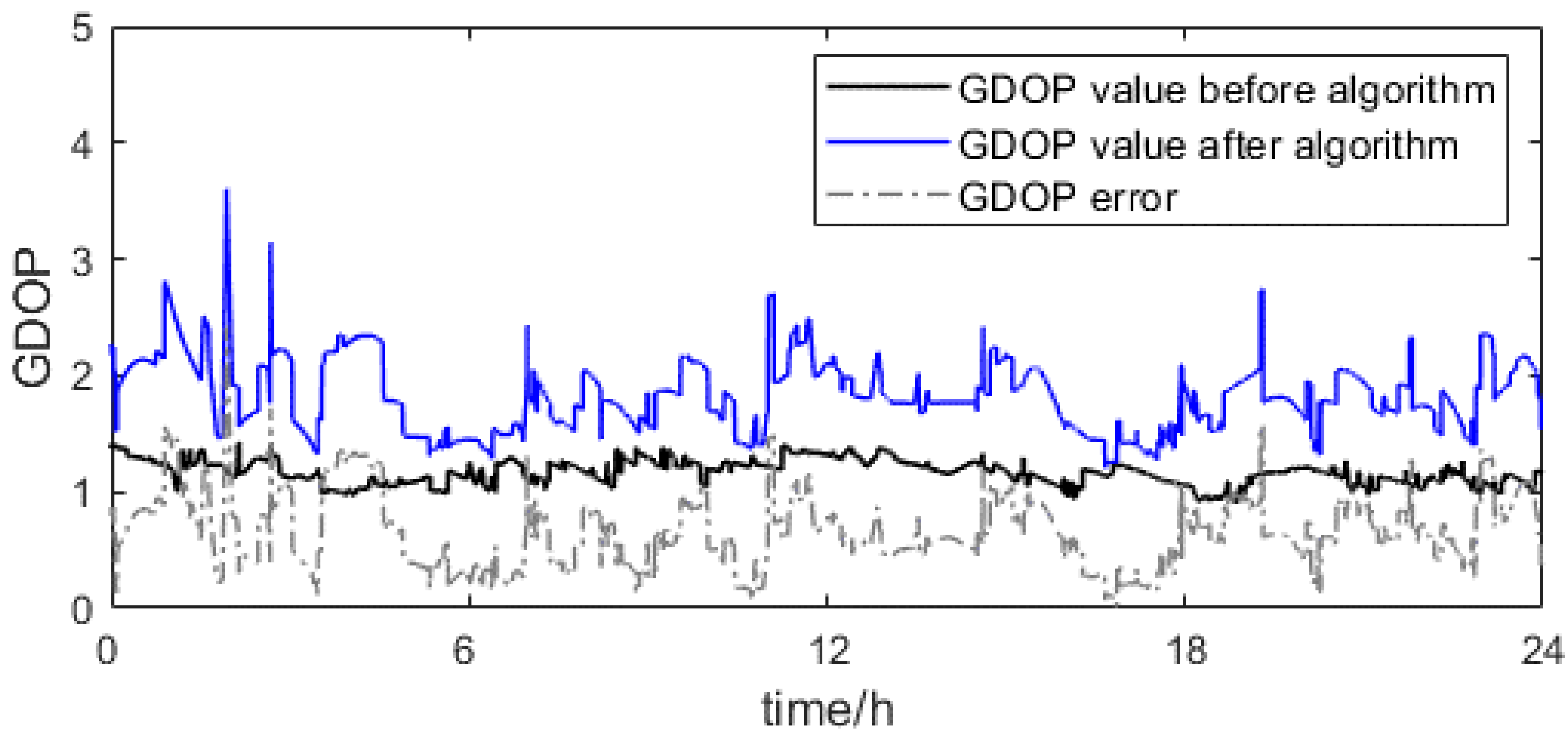
- When 90%, 80%, 70%, and 60% of the satellites are screened, the GDOP value increases by 20.75%, 37.87%, 58.17%, and 109.44%, respectively.
- When screening 70% of the satellites or more, this paper’s algorithm maintains its GDOP value well, compared with the optimal GDOP value satellite selection scheme, and it is basically consistent with the satellite selection ratio relationship model obtained from Equation (15).
- When screening 70% of the satellites or more, the GDOP value results show more sudden jump points on the image, which indicates that the screening algorithm implemented in this paper, and although it can maintain good accuracy under normal circumstances, it is not good at maintaining the positioning accuracy under special circumstances.
- When the satellite selection ratio is 70%, the GDOP values of the satellite selection algorithm, position error-aided GDOP algorithm, and fast genetic GDOP algorithm are improved by 8.56%, 5.70%, and 2.89%, respectively, compared with the traditional GDOP satellite selection algorithm. The GDOP increase of this paper’s algorithm is slightly higher than the other two methods, but it also stays at a lower value.
- The standard deviation of the above four algorithms is when the satellite selection ratio is controlled at 70%: 0.1586, 0.2390, 0.3076, and 0.1355. It is shown that the localization stability of the algorithm in this paper is worse than the traditional GDOP algorithm and fast genetic GDOP algorithm, but better than the position error-aided GDOP algorithm.
4.2. Positioning Accuracy Analysis
4.3. System Computational Complexity Analysis
5. Conclusions and Prospect
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, Q.; Yi, J. Brief analysis on global four major navigation satellite systems. J. Navig. Position. 2020, 8, 115–120. [Google Scholar] [CrossRef]
- Li, G.; Xu, C.; Zhang, P.; Hu, C. A modified satellite selection algorithm based on satellite contribution for GDOP in GNSS. In Advances in Mechanical and Electronic Engineering; Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2013; Volume 176, pp. 415–421. [Google Scholar]
- Niu, Y.; Li, K. A GNSS four-system satellite selection method based on UERE weighted optimization. J. Navig. Position. 2023, 11, 124–130. [Google Scholar] [CrossRef]
- Xue, S.; Yang, Y. Combined Walker Configurations with Minimal GDOP. J. Wuhan Univ. (Inf. Sci. Ed.) 2016, 41, 380–387. [Google Scholar] [CrossRef]
- Han, T. Research on GNSS Multi-System Satellite Selection Strategy. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2014. [Google Scholar]
- Yang, J.; Zhang, H. Satellite fault diagnosis based on optimal parity vector method. Acta Aeronaut. Astronaut. Sin. 2002, 2, 183–186. [Google Scholar] [CrossRef]
- Zhang, L.; Lv, H.; Wang, D.; Hou, Y.; Wu, J. Asynchronous RTK precise DGNSS positioning method for deriving a low-latency high-rate output. J. Geod. 2015, 89, 641–653. [Google Scholar]
- Teng, Y.; Wang, J.; Huang, Q.; Liu, B. New characteristics of weighted GDOP in multi-GNSS positioning. GPS Solut. 2018, 22, 74. [Google Scholar] [CrossRef]
- Zhang, X.; He, L.; Li, Y.; Zhang, R. An Improved Satellite Selection Algorithm Based on Elevation Angle and GDOP Contribution Value. Softw. Guide 2016, 15, 16–20. [Google Scholar]
- Chen, J.; Xu, L.; Li, X. Analysis of receiver position error impact on GNSS timing. Chin. J. Sci. Instrum. 2017, 38, 1458–1465. [Google Scholar] [CrossRef]
- Qian, H.; Fu, Z.; Ning, X.; He, R. Fault diagnosis algorithm for GPS/SINS with unknown perturbation distribution matrix. Chin. J. Sci. Instrum. 2013, 34, 208–214. [Google Scholar] [CrossRef]
- Lu, Y. GPS Global Positioning Receiver—Principle and Software Solution; Publishing House of Electronics Industry: Beijing, China, 2009; pp. 128–133. [Google Scholar]
- Wang, B.; Tian, S.; Zhong, Y.; Deng, j. Design and Accuracy Analysis od Star Selection for Relative Positioning with GNSS Multi-System. Beijing Surv. Mapp. 2021, 35, 500–504. [Google Scholar] [CrossRef]
- Mosavi, M.R.; Divband, M. Calculation of geometric dilution of precision using adaptive filtering technique based on evolutionary algorithms. In Proceedings of the 2010 International Conference on Electrical and Control Engineering, Wuhan, China, 25–27 June 2010. [Google Scholar]
- Jin, L.; Huang, Z.; Li, R.; Ma, Y. Study on Fast Satellite Algorithm for Integrated Navigation. Acta Electron. Sin. 2009, 37, 1931–1936. [Google Scholar]
- Huang, J.; Ba, X.; Liu, H.; Lu, Y.; Chen, J. A Fast Satellite Selection Algorithm Based on Positioning Error for Multi-Constellation Satellite Navigation System. Sci. Technol. Eng. 2015, 15, 87–91. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Star selection ratio | 1 | 0.90 | 0.80 | 0.70 | 0.6 | 0.50 |
| Number of stars selected | 22 | 19 | 17 | 15 | 13 | 11 |
| GDOP | 1.661 | 1.779 | 1.818 | 1.919 | 2.143 | 2.686 |
| ΔGDOP | 0 | 0.118 | 0.157 | 0.258 | 0.482 | 1.025 |
| Star Selection Ratio | GDOP Value | ||
|---|---|---|---|
| Minimum | Maximum | Average | |
| Before algorithm | 0.9131 | 1.4211 | 1.1492 |
| After 90% screening | 0.9762 | 2.1126 | 1.3979 |
| After 80% screening | 1.1196 | 2.2650 | 1.5830 |
| After 70% screening | 1.2031 | 3.6044 | 1.8161 |
| After 60% screening | 1.2872 | 3.8324 | 2.4048 |
| Satellite Selection Algorithm | GDOP Value | ||||
|---|---|---|---|---|---|
| Minimum | Maximum | Average | Incremental | Standard Deviation | |
| Traditional GDOP | 1.2800 | 1.9985 | 1.5939 | 0 | 0.1586 |
| Algorithms in this paper | 1.3364 | 2.4147 | 1.7303 | 8.56% | 0.2390 |
| Position error-aided GDOP | 1.2111 | 2.5693 | 1.6847 | 5.70% | 0.3076 |
| Fast genetic GDOP | 1.6401 | 2.0269 | 1.6401 | 2.89% | 0.1355 |
| Positioning Error (m) | Traditional GDOP | Algorithms in This Paper |
|---|---|---|
| X-axis | 0.8315 | 1.1539 |
| Y-axis | 1.5474 | 1.7790 |
| Z-axis | 2.2777 | 2.5045 |
| Satellite Selection Algorithm | Arithmetic Category | |
|---|---|---|
| Matrix Multiplication (Times) | Matrix Inversion (Times) | |
| Traditional GDOP | 113,696 | 56,848 |
| Algorithms in this paper | 20,592 | 10,296 |
| Position error-aided GDOP | 38,145 | 18,418 |
| Fast genetic GDOP | 37,002 | 18,640 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, W.; Wu, Z. Fast Screening Algorithm for Satellites Based on Multi-Constellation System. Electronics 2024, 13, 2603. https://doi.org/10.3390/electronics13132603
Zhou W, Wu Z. Fast Screening Algorithm for Satellites Based on Multi-Constellation System. Electronics. 2024; 13(13):2603. https://doi.org/10.3390/electronics13132603
Chicago/Turabian StyleZhou, Weidong, and Zhiqiang Wu. 2024. "Fast Screening Algorithm for Satellites Based on Multi-Constellation System" Electronics 13, no. 13: 2603. https://doi.org/10.3390/electronics13132603
APA StyleZhou, W., & Wu, Z. (2024). Fast Screening Algorithm for Satellites Based on Multi-Constellation System. Electronics, 13(13), 2603. https://doi.org/10.3390/electronics13132603