Transmission and distribution grids are increasingly characterized by the presence of distributed energy resources, such as electric energy storage systems (ESS), renewable energy plants, and plug-in electric vehicles. This paradigm shift from passive and centralized energy systems of the past presents numerous challenges in terms of the increased complexity of operations. Among other factors, the variability in the power production from renewable plants and the intermittency of PEVs demand require the continuous control and optimization of the grid. Among the available means of control, grid reconfiguration is acknowledged as one of the degrees of freedom available to balance the grid load, reduce grid losses, and quickly restore the service after disruptions to the grid [
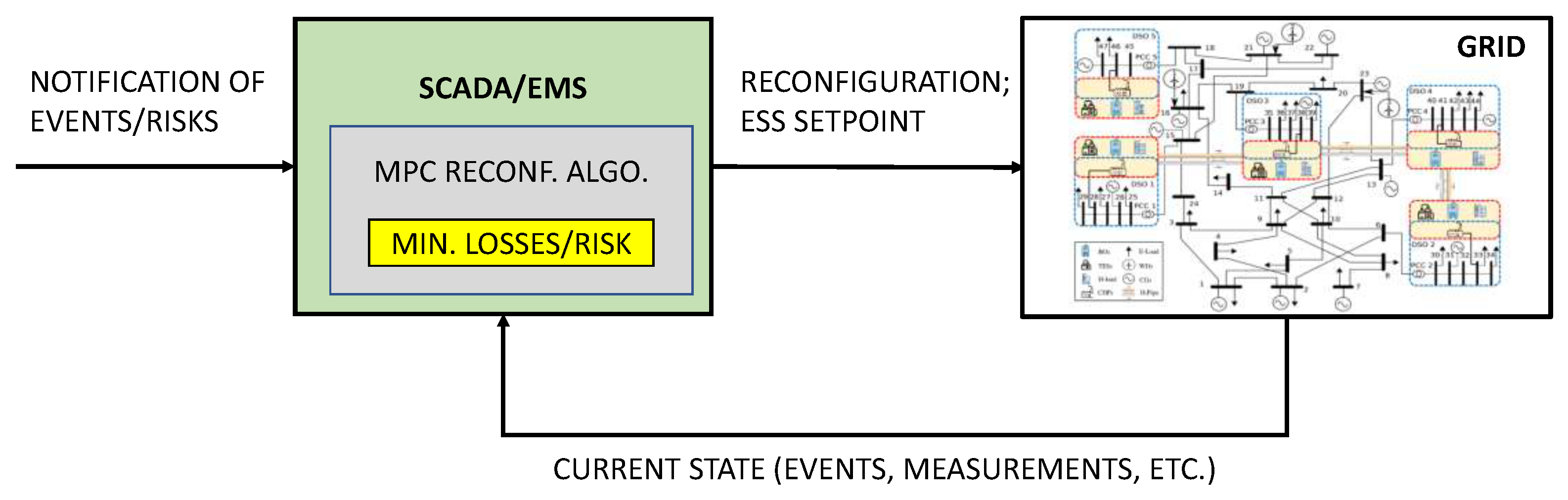
1]. While reconfiguration was performed offline in passive grids, it can now be performed more often during the day to dynamically optimize the grid following its evolving boundary conditions. In this paper, we describe a reconfiguration algorithm based on model predictive control (MPC), whose goal is to dynamically reconfigure the grid in order to minimize losses when facing adverse events such as faults. The paper extends our previous work [
2] by removing the requirement that the grid be connected at all times. In the present version, the algorithm also allows for the formation of islands in the grid, which is a natural scenario in the future, where it is expected that microgrid islands will be able to dynamically connect and disconnect from the grid.
1.1. Literature Survey and Contributions
Network reconfiguration algorithms play a crucial role in enhancing the efficiency and resiliency of modern electric grids. Indeed, changes in the grid topology can reduce power losses, improve voltage profiles and stability, balance loads, and mitigate the impact of faults and attacks [
3]. Many network reconfiguration approaches have been proposed in the literature and can be classified in classic optimization-based, (meta) heuristics (including evolutionary algorithms) and machine-learning-based solutions. With respect to the other algorithms, the former class of algorithms has the advantages of allowing for an optimal solution to the reconfiguration problem to be found, as well as explicitly considering constraints and optimizing the provided optimality criteria. However, this often comes at the price of high computational costs. On the other hand, (meta)heuristics are characterized by lower computational costs but do not guarantee the optimality of the reconfigured topology. Machine Learning (ML), particularly Reinforcement Learning (RL), techniques represent a promising research line in the context of network reconfiguration for large-scale systems due to their ability to infer (near) optimal policies. As an example, in [
4], the authors address the dynamic distribution network reconfiguration, proposing a Deep Reinforcement Learning algorithm. The proposed solution relies on a reduced action space allowing for the artificial agent to only select configurations that satisfy radiality constraints. The objective function aims to minimize the costs associated with the active energy loss and the manipulation of switching devices. In [
5], the authors propose an RL algorithm that is able to learn the network reconfiguration control policy based on historical data. The same approach was adopted in [
6], in which the authors train an off-policy RL agent using historical data. Said data are further increased by means of data augmentation techniques, allowing for the training to be implemented on a larger data set. Although these techniques avoid relying on exact models of the distribution network, they have some drawbacks. Indeed, it should be noted that the training phase required by the (D)RL approaches may require significant computational effort. In this respect, in [
7] the authors compared several DRL algorithms with classic optimization-based heuristics and genetic algorithms. The results showed how DRL techniques are characterized by significantly lower computational times (especially when the dimensions of the considered scenario increase) but require long training phases. Another issue with ML-based approaches is represented by the fact that they do not explicitly consider constraints. In this respect, there are some works that tackle this issue, proposing safe learning techniques. In [
8], for example, the authors adopt the Deep Deterministic Policy Gradient (DDPG) algorithm to learn the control policies. Safety is implemented by means of a layer allowing for the prediction of changes in the constrained states, preventing the violation of operational constraints. However, as was also pointed out by the authors, in the context of network reconfiguration problems, RL-based techniques should be used wisely. Indeed, it is shown that the control performances of MPC techniques are in line with those of the proposed DRL algorithm. Since DRL algorithms require a significant effort in the tuning of hyperparameters and the shaping of the reward functions, the added complexity may not be worthwhile compared to the small improvement in performance. Furthermore, distribution networks may be composed of devices operating in a continuous and/or discrete way. This means that different DRL techniques should be adopted in different scenarios, since not all algorithms can deal with continuous and/or discrete state and action spaces. Finally, it should be also noted that RL algorithms are trained on specific instances: if such training scenarios are not representative of new, unforeseen scenarios, the learned policy may be not effective.
Motivated by these considerations, the solution proposed in this work to tackle the network reconfiguration problem is based on MPC, which is an optimization-based technique retaining the advantages of optimal control-based approaches. As discussed in
Section 4, the proposed MPC approach guarantees low computational costs, making it suitable for real-time applications. MPC is a closed-loop optimization technique, which has been widely adopted, especially in the industrial sector. Surprisingly, in the context of network reconfiguration, MPC has not been extensively adopted [
1] although there are some interesting works in the literature. In [
9], for example, the author considers a distribution network composed of several distribution feeders and tackles the problem of network reconfiguration with the goal of minimizing the operating costs. The proposed solution, based on a Stochastic MPC, proves to be able to reduce energy losses and to induce a certain degree of robustness in the network with respect to the variable power generation peculiar of Renewable Energy Sources (RESs) and prediction errors. A Stochastic MPC was also proposed in [
10], in which the authors tackle the problem of scheduling operations and reconfigure switches in a distribution network. The proposed solution aims to minimize the total operating costs and embed technical constraints (e.g., ESSs’ limits, power flow equations, bus and lines capacities), minimize topology constraints, and also establish a demand–response model. The authors also discuss the trade-off between computational costs and performances (i.e., cost reductions), which depends on the dimension of the considered time horizon. In [
11] the authors adopt a similar methodology to simultaneously address the network reconfiguration and Plug-in Electric Vehicles’ (PEVs’) charging management problems. The proposed stochastic MPC aims to minimize the operating costs of the distribution network (including the costs associated with changes in the network configuration) and of the PEVs’ charging. In [
12], the authors address an interesting generalization of the network reconfiguration problem, simultaneously considering the distribution network, grid actuators and buildings. The authors propose a centralized MPC to optimize the power flow of the distribution network while guaranteeing thermal comfort in the buildings. An interesting work in the context of MPC algorithms applied to reconfiguration problems is [
13], in which the authors consider networked cyber–physical systems. Although the application domain and the considered control problem are not in line wih the subject of this work, the proposed distributed MPC implementation could be interesting for future development. Topology changes in large networked systems are also addressed in [
14], in which the authors propose a distributed MPC that is able to guarantee the feasibility of the control actions taken by the local controllers.
The main contribution of this paper is the investigation of grid reconfiguration, also considering the possibility of the dynamical formation of islands in the grid. To achieve this, the formulation of the previous work [
2] was extended with new radiality constraints that also allow for the formation of islands. Also, the power flow equations are integrated by following the conic programming approach presented in [
15,
16], which is slightly modified here by the addition of simple constraints (
14) and (
15), which state the symmetric and anti-symmetric properties of two variables appearing in the power flow equations. Their addition helps the solver to find the correct solution.
Regarding radiality, different radiality constraints have been proposed in the literature. In [
17], in which 0 denotes the closed state for a switch and 1 the open one, radiality is imposed by forcing the sum of the state of all the switches to one along every loop in the network. In this way, one switch in every loop is open, and thus the network is radial. In [
18], in which one substation is considered, the list of all possible paths from every node to the substation is computed. Then, radiality is enforced by constraining every node so that only one such path is active, and also by forcing that, if a path is active, all the paths contained in that path are also active (recall that a path is defined in [
18] as a sequence of links connecting a given node to the substation). In [
19], Romero-Ramos et al. propose using a simple equation that constrains the sum of the status of all the links (which is equal to one if the link is closed) to be equal to the number of non-substation buses in the network. This equation is later used in [
12]. The authors of [
19] explain that this simple equation fails to impose radiality when there are non-injection buses in the network (since they can remain disconnected, and loops can then form). To solve this issue, they include constraints to force the existence of at least one active path between every zero-injection bus and a non-zero-injection bus. A similar strategy is adopted in [
10], in which additional constraints are included to force every node to have one parent node. An alternative method for checking the radiality of a strongly connected grid (i.e., with no islands) is presented in [
20], based on a calculation of the determinant of the connection matrix. This method is used, for example, in [
11]. In this paper, we write the radiality constraints so that they also work in the islanded case, i.e., they allow for the formation of radial islands in the grid. To the best of our knowledge, the other work considering the formation of dynamic islands is [
21], which proposes different and more complex equations than the ones presented here.
The relevant features of the key papers discussed above are outlined in
Table 1.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}