Abstract
Unmanned vehicles have become a part of everyday life, not only in the air, but also at sea. In the case of sea, until now this usually meant small platforms operating near shores, usually for surveying or research purposes. However, experiments with larger cargo vessels, designed to operate on the high seas are already being carried out. In this context, there are questions about the threats that this solution may pose for other sea users, as well as the safety of the unmanned vehicle itself and the cargo or equipment on board. The problems can be considered in the context of system reliability as well as the resilience to interference or other intentional actions directed against these objects—for example, of a criminal nature. The paper describes the dangers that arise from the specificity of systems that can be used to solve navigational problems, as well as the analysis of the first experiences of the authors arising from the transit of an unmanned surface vessel (USV) from the United Kingdom to Belgium and back, crossing the busiest world shipping route—the English Channel.
1. Introduction
Autonomous vehicles, such as drones in the air, will be extensively used at sea in the near future. This trend seems to be increasingly accepted by the marine community, primarily for economic reasons. Autonomous ships are considered mainly in the context of cost reduction. Currently, autonomous or remotely controlled platforms are used at sea, primarily as carriers of various measuring devices. This applies particularly to hydrography, oceanography and off-shore technologies. However, these are still operations carried out mostly nearshore, usually in controlled test areas or outside the shipping routes.
Many companies, mostly from Scandinavian countries and Japan, are working on full-size autonomous ships with the goal of obtaining cargo vessel or even passenger vessel capabilities. Kongsberg and Rolls-Royce seem to be conducting the most advanced work. They have just received funding from the European Commission (the ‘Autoship’ project) in the amount of 20 million euro from 27.6 million of the total project costs [1]. In this framework, within two and a half years, two autonomous ships will be built with the option of remote control and all the necessary infrastructure. The tests are to be carried out during the two pilot demonstration campaigns on the sea routes from the Baltic corridor to the largest ports of the European Union. It can be expected that the success of these experiments will also lead to the fact that in the future some existing ships will be reconstructed to such a standard, which may prove to be a cheaper solution.
Rolls-Royce together with the Finnish ferry operator Finferries demonstrated the passage of the ferry ‘Falco’ between Parainen and Nauvo, south of Turku, Finland, in December 2018. The ferry navigated autonomously, including the collision avoidance maneuver. Some part of the passage was done in the remote control mode. Rolls-Royce and Finferries are now engaged in the SVAN research project (Safer Vessel with Autonomous Navigation). It is the continuation of the earlier Advanced Autonomous Waterborne Applications (AAWA) research project, funded by Business Finland [2].
Kongsberg has experience in working on autonomous vessels development after the common project with Yara on world’s first autonomous and zero emissions container ship. Norwegian shipbuilder Vard has been selected to build the vessel. It is planned to be ready to operate ‘YARA Birkeland’ completely autonomously by the year 2022 [3]. It should be noted that in April 2019 Rolls-Royce Commercial Marine was acquired by Kongsberg Maritime, and they are now fully integrated, so the autonomous shipping projects are being conducted under the new organizational frame [4].
MUNIN (Maritime Unmanned Navigation through Intelligence in Networks) is another project in this field. Research undertaken between 2012 and 2015 resulted in the description of the concept of evolution from manned to unmanned vessels, through redesigning of the ships’ key tasks [5].
Autonomous underwater vehicles (AUVs) are often considered also as unmanned objects, requiring a new approach in regulation and legislation. However, from the point of view of ocean-going autonomous ships development this is a slightly different challenge. AUVs are mostly used in the close vicinity of mother vessel, due to the positioning methods used in this kind of operation. But there are systems which utilizes both underwater and surface vehicles with no human presence, becoming the cutting-edge means of marine environment exploration, but also facing challenges related to both types of vehicles. The winning solution of the recently completed global competition called Shell Ocean Discovery XPRIZE may be an example of the successful cooperation between underwater and surface vessels in order to obtain high-quality data about the seafloor. GEBCO-NF Alumniteam (name after General Bathymetric Chart of the Ocean and Nippon Foundation) developed a system consisted of the AUV Hugin, equipped with a high-resolution synthetic aperture echosounder and multibeam echosounder, positioned from the surface by the unmanned surface vessel SEA-KIT [6,7,8]. The same vessel a couple of months later completed the first unmanned passage between Tollesbury in Great Britain to Ostend in Belgium and back, being controlled only by the operators located on shore [9,10]. The USV’s route crossed the busiest shipping route in the world.
The beginning of coexistence of manned and unmanned vessels, especially autonomous sea-going vessels, in the same areas at sea, provokes many questions and objections. The most important ones, considering the scope of the paper, are the questions of how to guarantee that autonomous vessels will be at least as safe as modern crewed vessels, while operating in the same areas. Undoubtedly, this is a technological challenge, but there is also a challenge for legislation. It will certainly require corrections to many existing documents and rules, already adopted by the marine community and international treaties. New regulations will affect the variety of issues related to transport of goods, shore infrastructure, insurances, etc. However, the fundamental questions are those related to the effective safety and risk management of this kind of vessel.
Classifying societies (for example Bureau Veritas, DNV GL, Lloyd’s Register, CCS) and IMO (International Maritime Organization) defined their views on the issue of the construction of unmanned/autonomous ships, usually in the form of guidelines [11,12,13,14,15]. Unfortunately, in terms of the approach to navigation issues, these are usually quite general statements, similar to: ‘the data from various ship’s sensors should be gathered and evaluated in order to thoroughly determine the location and heading of the ship. Redundant sensors and positioning by multiple sources should ensure a high degree of data accuracy. The current speed and water depth should be monitored as well’.
More specific information is contained in [16] however they refer to the possibilities of the engine room autonomy assurance. Eder, in turn, is considering primarily the adequacy of legal documents that currently apply to the perspective of ships without crew [17].
Gu et al. in [18] performed an in depth review of literature on autonomous ships with the conclusion that a lot of publications about the design and safety of such kind of vessels exists, although in the majority of them the navigational aspect is understood as the planning of the trajectory and its realization as the steering process of the vessel. The problem of data acquisition to the steering is somewhat overlooked. Finally, the authors of [18] suggest that it is the right time to shift the research focus from the basic control and safety studies to transportation and logistics applications.
In this paper, the authors decided to focus on the navigational aspects of unmanned and autonomous vessels. The role of the Officer of the Watch tends towards being augmented or even replaced by the systems related to the autonomous navigation and automated collision avoidance. Those two aspects, with associated threats and possible solutions, will be presented in the next sections.
The main motivation of the authors of this paper to analyze this issue was the active participation in the tests of USV ‘Maxlimer’—The unmanned vessel of SEA-KIT type, mentioned above, including her passage through the North Sea, crossing the entrance to the English Channel. Observations of the navigational watch conducted on land, undertaken during this passage and earlier tests, led to the conclusions, listed in Section 4.
2. Navigational Equipment and Related Challenges
An autonomous vessel is nowadays such a novelty that security advisements should be considered more as speculations than scientific analyses. However, it is worth considering various aspects of this issue to reduce the number of aspects where threats may appear. In this context, it is necessary to consider the reliability aspects of all the mechanisms installed on such a ship, because even the simplest failures, such as a blown fuse or a leaky gasket, can cause a serious problem when there is nobody on board to fix it. However, humanity has been able to send unmanned facilities into space for many years and guarantee their long-term exploitation. Therefore, it can be assumed that the theory of reliability is such a developed science that it can solve such a tasks. A separate issue is to ensure the safety of the cargo, but in this paper the authors want to emphasize issues related to navigational aspects of the unmanned ship at full sea.
Before analyzing the safety-related aspects of unmanned vessels, some nomenclature should be clarified. In the literature, the word ‘autonomous’ is often overused, to name all the vehicles with no crew onboard. ‘Maritime Autonomous Surface Ships (MASS) UK Code of Practice’ [19] recognizes 6 levels of autonomy of the vessel referring to the levels of control, as listed in Table 1.

Table 1.
Maritime Autonomous Surface Ships (MASS) Level of Control Definitions according to the ‘MASS UK Code of Practice’ [19].
This classification is mostly consistent with the levels of control defined by the Lloyd’s Register in the document ‘Cyber-enabled ships. ShipRight procedure-autonomous ships’ [13]—Table 2:
Table 2.
MASS Level of Control Definitions according to the Lloyd’s Register guidance document on autonomous ships. Reproduced with the permission from the authors of ‘Cyber-enabled ships. ShipRight procedure—autonomous ships’, published by Lloyd’s Register, 2016 [13] (p. 2).
The IMO, while setting the framework for the regulatory scoping exercise in 2018, approached this classification slightly differently, considering the option of remotely operated vessels with crew on board (Table 3) [15].
Table 3.
MASS Levels of Control according to IMO in the frame of a regulatory scoping exercise from 2018 [12,15].
Similar approach has been accepted in the Class Guideline for Autonomous and Remotely Operated Ships by DNV GL (Table 4) [12].
Table 4.
MASS Levels of Control according to the Class Guideline for Autonomous and remotely operated ships by DNV GL. Reproduced with the permission from the authors of ‘Autonomous and remotely operated ships’, published by DNVGL-CG, Edition September 2018 [12] (p. 51).
It should be also noted that the level of control of a majority of unmanned vessels (if not all) can be changed during operation.
Bratić et al. in [20] also analyze in detail the various interpretations of the concepts of ‘autonomous’ and ‘remotely controlled’ vessels, paying attention to the issues of the autonomy of a ship’s mechanisms and its reliability. In fact, unmanned surface vessels tested nowadays in real marine environment conditions are rather not higher than level 2 of the classification from [15]. However, the pace of development and the interest of industry in the incorporation of autonomous solutions into operating vessels is so high that it will only be a matter of relatively short time for higher levels of MASS control to be assumed. Possible challenges and threats from the navigator’s perspective are discussed below.
2.1. Route Following and Basic Equipment
The full autonomy of the ships (level 4–5 and equivalents) is certainly a long-term perspective. Initially these objects will be closely supervised, undoubtedly with elements of remote control. Navigational tasks in this context seem to be solved, because already today the degree of automation of navigation means that many manned vessels operate in autopilot mode from one waypoint to the next, ensuring the movement on the planned trajectory. This is ensured by connecting the GPS (Global Positioning System) receiver with autopilot and gyro-compass. The task is quite easy, because each new position determined by the GPS receiver is the basis for calculating a new bearing to the next waypoint. This information is passed to the autopilot as a new course to the target, and compared with the current course, which gives the basis for calculating the correction to the rudder/thruster. As a rule, this happens every second, so in the realities of ships it can be assumed that the process is smooth (analog). However, it should be noted that there is also a connection between the GPS receiver and the gyro-compass (Figure 1)—to correct the speed deviation to the gyrocompass, information on the ship’s latitude and its speed should be provided. These quantities can be obtained from the GPS receiver, however the speed can also be obtained from the log.
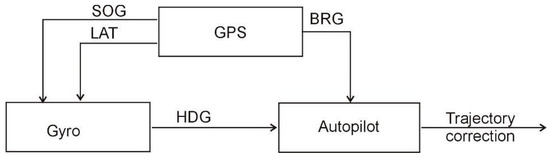
Figure 1.
The diagram of information flow for the implementation of route following.
In fact, the network of navigation data is more complex. Its still simplified version is shown in Figure 2. It should be noted that this is just one option of the technology dependency scheme. Also, one block of this scheme does not need to represent one particular device on the vessel, rather the technology, utilized for a particular purpose. It is clear here that a GPS and gyro-compass (or more general Global Navigation Satellite Systems (GNSS) and the heading device) are essential for the operation of all navigation systems. In the context of an autonomous vessel monitoring, it is worth noting that these data sources have a constant impact on satellite communication, which will most probably be the major communication method. The position of the ship and its course are the basis for setting the antenna of the communication system towards the satellite. The satellite-tracking functions of the satellite communication terminal use not only raw GNSS and heading data, but augment it with inertial motion units (IMU) and process the positioning information using the algorithms based on Kalman filtering to ensure the proper satellite tracking. Therefore, the lack of GNSS position input will not cause the malfunction of the satellite communication immediately, but the accuracy of the tracking solution will decrease with time.
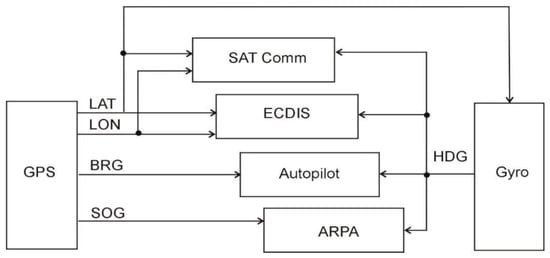
Figure 2.
Proposed navigation data network scheme for the high sea passage of autonomous vessel.
A similar approach can be found in [21], where the scheme of navigational data fusion is presented as one of the results of the Finnish works on the autonomous vessels development under the umbrella of AAWA project (Advanced Autonomous Waterborne Application).
The reliability of this network would require duplicating critical elements. However, with regard to GPS, this solution is not satisfactory at all. Experience from the operation of the GPS system on ships proves that the reliability of receivers is extremely high. The danger lies in the external actions towards the ships: currently the intentional interference with the reception of signals from satellites is considered to be such a threat, as detailed in Section 2.2.
2.2. Navigation Threats
It is expected that the GNSS receiver will be the primary source of position information for the autonomous ship. It is a very reliable and accurate positioning system, however, the problem of threats to its correct operation is currently being raised. Many parts of today’s critical infrastructures rely on uninterrupted access to GNSS positioning, navigation and timing services, but, at the same time, threats to denial of GNSS services are increasing. Radio frequency interference can be unintentionally emitted by commercial high power transmitters, ultra-wideband radar, television, very-high frequency (VHF), mobile satellite services and personal electronic devices. Moreover, malicious intentional interference is produced by jammers, whose rapid spreading is becoming a severe threat to GNSS.
Buesnel et al. proposed in 2016 the 6 groups of threats for GNSS work (see Figure 3). Some of them are common to all users (GNSS segment errors or atmosphere influence). Others, for example multipath, seem unlikely on the high seas. This kind of threat is mainly taken into account in very accurate measurements like hydrographic surveys of a harbor’s waters, etc. although the signal reflection from large vessel’s structures cannot be neglected. However, the most common threat is currently an intentional jamming interference and false signals sent intentionally with the intention of misleading the receiver. This type of threat was formerly considered as very unlikely, but there is a lot of evidence that this has become a very serious threat. This kind of attack against ships is not evidenced as strongly as against aerial drones, although it is obvious that this problem may be serious everywhere [22]. The example has been presented in [23] and is related to the Red Sea, Black Sea and the North-East area of the Mediterranean, where multiple GPS disruptions incidents has been reported in 2018 by several vessels operating in the listed areas. It is assumed that the reasons for these situations can be related to the armed conflict in Syria, but also the actions against the participants of North Atlantic Treaty Organization (NATO) exercises or travels of government officials may be engaged here. But we are not able to exclude that kind of events from the group of potential causes of GPS disruptions, because the unmanned vessels in many cases are design to operate in high risk areas of all types, including tensions or even armed conflicts between states. Another case has been raised in [24] where the GPS jamming attacks from the North Korea are presented as the main reason of the eLoran system implementation around the territory of South Korea.
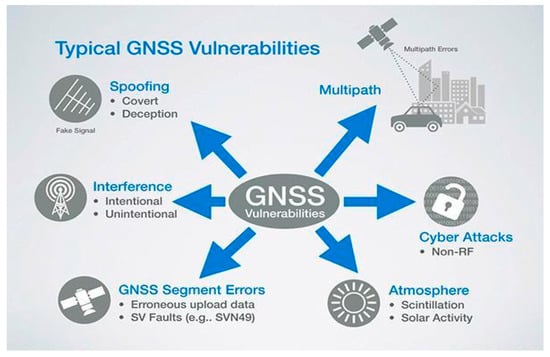
Figure 3.
Typical GNSS vulnerabilities [22].
At the beginning of the 21st century, jamming was considered the most common threat. The accuracy and availability of the receiver’s position solution during the interference were analyzed, for example, in the STRIKE3 project [25]. This investigation shows that as the interference power increases, the receiver performance continues to degrade and finally loses the position fix. These results are partially different for mass-market and professional-grade receivers. It can be seen that the mass-market receivers prioritizes the availability of the position solution over its accuracy, in contrary to professional-grade ones.
The satellite frequency band is expected to become increasingly congested as the same band is exploited not only for navigation and communication, but for different services also, such as remote sensing, surveillance, or weather forecast. A larger number of users sharing the same frequency band means increased risk of interference. However, interference is not always unintentional, but could also be caused by signals deliberately transmitted with the purpose of disrupting receiver operations. This is associated with satellite navigation, but in many cases jammers generate noise in very wide spectrum, wider than the GNSS spectrum.
One of the examples of counteracting the threat of GNSS disrupting, but also to identify the scale of the threat, was the DETECTOR project, co-financed by the European GNSS Agency under the 7th Framework Program. It included the development and verification of a low-cost device for the detection of the interference in the GNSS band and the occurrence of jamming. This device was supposed to be useful for interference detection for GNSS in land transportation. Tests have proved the system’s usefulness not only for reliable detection of interference, but also for determining the characteristics of interfering devices in laboratory conditions, but also during field experiments and in real conditions [26].
Until recently, GNSS receivers were vulnerable to jamming or spoofing. Only an experienced user, carefully observing certain parameters of the signal, can suspect that such a threat appears. The final effects were observed in the form of a radical decrease in the accuracy or the interrupted work of the receiver. Currently, there are GPS receiver modules with a built-in jamming threat signaling mechanism, for example Gmm-u5j [27]. There are also receivers with a multi-segment, controlled antenna (GAJT), which eliminates the signals received from a particular angle sector, thus eliminating the reception of the jammer signal.
2.3. Collision Avoidance—Issues on Manned Vessels Versus Challenges to the Unmanned Platforms
Collision avoidance is a critical task for all vessels, including autonomous ships. The Convention on the International Regulations for Preventing Collisions at Sea (COLREGs) entered into force in 1977. The set of rules is based on a good seamanship and has been established through decades of marine operations. Although those operations have been performed by manned vessels and COLREGs put all the required tasks and the responsibility on vessels’ crew officers of the watch and masters of sea-going ships. Development of rules of cooperation between manned and unmanned vessels is one of the biggest challenges of autonomous ships industry.
While COLREGs requires the decisions to be taken by humans, the studies from marine accidents reports prove that 60% of accidents are caused by human error. Structure or mechanical failure has been a direct reason for an accident in 19% of cases and only 10% has been caused by equipment failure [28]. Other sources claimed that even 80% to 85% of all accidents are caused by directly initiated human error or a lack of a proper response to the situation [29].
Ziarati in [29] listed the common reasons of collisions at sea, which refers to human actions on board. They are listed below in the order of the number of occurrence in the collision reports analyzed by the authors of [29]:
- Bad decision making
- Poor lookout
- Poor manning level
- Poor use of radar
- Broke rules
- Inexperience
- Poor communication between personnel
- Fatigue
- Unfamiliarity with equipment
- Poor training
- Over working
- Radio failure
When we are trying to find here the reference to the unmanned or autonomous vessels, it is all dependent on the level of control, in other words, on the level of human interference with the unmanned ship operation. Bad decisions, the most common collision reason, can occur in case of remotely controlled vessels to. In case of autonomy, it will be the result of the algorithm or artificial intelligence implemented on the vessel and its reliability will depend on the level of sophistication of the system. The most complex situation is the crossing situation of the manned and autonomous platforms. While the autonomous ship will always behave according to the algorithm (assuming the proper performance of its components), the behavior of the people is often unpredictable and the ignorance of rules occurs.
The problem of a proper lookout on the manned vessels is often caused by the reduction in the number of crew on board and overwork. In the case of unmanned ships, this is a more technical challenge. Both remotely controlled vessel and autonomous ship need to sense the environment and send the information to shore in real time or independently make decisions based on that. The reliability and accuracy of sensors onboard or the communication system capabilities will limit the amount of information accessible at the particular moment of time for the operator or the decision-making algorithm.
Poor manning level, fatigue and over working—all these factors refer to the working conditions. Working at sea has been always automatically understood as connected with danger, parting with families, loneliness and tiredness. The introduction of unmanned vessels technology immediately moves some of the workstations from sea to shore, reducing the risk of the negative impact of hard-working conditions on the safety of the vessel.
Inexperience or poor training are also among the common causes of ships’ collisions. The issue of proper education of unmanned vessels operators or autonomous ships supervisors will be a great challenge in the close future. There is certainly a high need of real at-sea experience to properly assess the situation of the vessel during the sea passage. With the increased number of unmanned vessels operational, and high demand on skilled operators on the market, the problem of sufficient training procedures for young professionals has to be solved to guarantee they have a deep understanding of all the capabilities and limitations of the systems they are using and the environment that the equipment is working in. According to [29], officers of the watch often have problems with fully understanding the automatic systems, which is also one of the main causes of manned ships’ accidents nowadays.
An interesting study has been presented in [30]. Authors used the Human Factor Analysis and Classification System (HFACS) framework, originated in the aviation industry, to analyze the reasons for marine accidents caused by human-related issues. They are trying to understand the human errors at different levels of the whole marine transportation process. According to their studies, human failures are not only present at the ‘sharp end’—caused by the operators working close to the source of danger—but they also can be found at other levels of organization, including the shore supervision of marine operations. This kind of consideration should be also taken into account while talking about the present and future of autonomous vessels at various levels.
Similar research has been presented in [31]. The authors focus on the human factor in MASS system design, the general problems of distrust and over-trust in automation and the user experience in the unmanned vessel supervision and control branch.
4. The Case of the First Unmanned Ship Crossing the English Channel
The segment of unmanned vessels is now one of the most important areas for research and marine technology development. There are numerous simulations being conducted to predict marine processes. Many real vessels, from small sizes model boats to larger ships, are tested in various testing areas. Finland is a pioneer in establishing a dedicated area for autonomous vessels testing. The Jaakonmeri Test Area, 17.8 km long and 7.1 km wide, is managed by DIMECC, the company leading e.g., the One Sea—Autonomous Maritime Ecosystem project [47]. This kind of work is essential for technological progress although the real challenge is the use of autonomous and unmanned systems in real navigation situations.
4.1. SEA-KIT—Built, Trials, Unmanned Operations
SEA-KIT has been designed by the UK Company Hushraft Ltd., and built as the part of the GEBCO-Nippon Foundation Alumni Team solution for the Shell Ocean Discovery XPRIZE Challenge [6,7,8]. The requirements of the competition determined the size and functionalities of the vessel. The hull with a detachable mast fits inside the standard 40-feet shipping container, which allows it to be mobilized in any part of the world relatively quickly and cost-effectively. The specification of the vessel is presented in Table 5.
Table 5.
Specifications of unmanned surface vessel (USV) SEA-KIT ‘Maxlimer’ [6,7,8].
The unusual shape of the hull ensures good stability, necessary for the survey work and the optimal use of space inside the vessel in the situation where the midship part is reserved for the transportation of Autonomous Underwater Vehicle, launched and recovered through the stern part.
The first trials of the new design vessel have been conducted in the United Kingdom. Initially the vessel has been registered as a manned boat, first, due to the lack of regulations related to the unmanned vessel registration, second, to ensure the safety of people working on the boat at the early stages of trials. Since 2017, unmanned vessels can be registered in UK [48] and the status of SEA-KIT has been changed.
Trials of the K-Mate Autonomy Controller and the systems responsible for the cooperation between the surface vessel und the AUV have been conducted on the waters of Oslo Fiord in Norway, mostly on the sheltered area off the Kongsberg Maritime facility in Horten.
The vessel has been exposed to the open sea environment during field tests in Greece, working on the Ionian Sea. The final trial of the Shell Ocean Discovery XPRIZE covered 32 h on continuous unmanned, over horizon operation, including launch and recovery of the AUV and 24 h of hydrographic data collection by two cooperating vehicles. The state-of-art seabed mapping operation was easier from the navigator’s point of view because there was no traffic inside the survey area during the challenge.
The next stage was to test the technology in real traffic conditions. This kind of test was conducted in May 2019 on the English Channel, the busiest world shipping route (around 400 ships every day, according to [49]) when ‘USV Maxlimer’, (Figure 4a), successfully crossed the channel from Tollesbury in the UK to Ostend in Belgium.
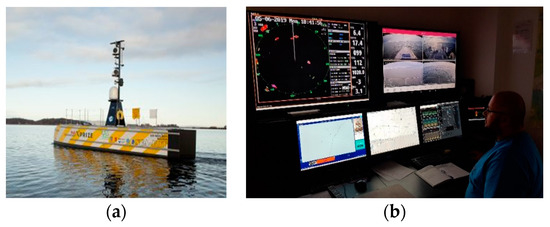
Figure 4.
The first unmanned crossing from the UK to Belgium: (a) The ‘USV Maxlimer’—SEA-KIT type unmanned surface vessel [50]; (b) Master Mariner Karol Zwolak in the shore control station during the transit of the vessel (photo by Karolina Zwolak).
4.2. The Voyage
The vessel has been controlled only from a shore control station (Figure 4b). A K-Mate Autonomy Controller, a product of Kongsberg, was utilized as the shore operator’s decision’s executor and the G-SAVI Global Situational Awareness via Internet system of Hushcraft Ltd., Essex, UK, provided the operators with the navigational and environmental data. The communication between vessel and shore control station was maintained using the Very Small Aperture Terminal (VSAT) satellite system.
It should be underscored, that this project was not an autonomous passage, decisions were taken by humans only, although the route followed was executed in autopilot mode. In some cases the course was set by the operator instead of steering to waypoint methods. But full control of the vessel was executed by the software control over the ship’s mechanisms with no human element on board, which make this passage a good basis for further analysis towards the autonomy of surface vessels.
The situation assessment during the passage was based on a radar image, AIS system information, electronic chart and the CCTV images sent to the control station. The functionality of the workstation was very similar to the usual bridge or helmsman desktop on the smaller size vessel. The only difference was the lack of a simple lookout. The crucial part of the watch is to perform a proper data fusion based on electronic device reads. With some limitations of the CCTV image, especially related to the distance estimation, radar becomes the main device for the collision avoidance decisions.
The CCTV images provide information about objects in the vicinity of the vessel, although the proper recognition of navigational aids and distance estimation is really difficult to perform only based on CCTV. This is a promising area for the implementation of automated image-processing methods for object detection and the recognition of nautical aids.
Another issue, which seems to be crucial for the safety of unmanned vessels operation, is a robust and reliable self-diagnosis system on the unmanned vessel to provide the operator with performance quality indicators and an alarm regarding any malfunctions, loss of input data, unforeseen behavior of specific devices or unexpected changes in positioning, speed, heading and attitude measurements systems data.
Our own experience and numerous discussions with the designer and users of the new class of vessel, which was used for this passage, lead to the conclusion that only the extensive experience of the operators as the crew at sea ensures the seamless transition between a manned vessel’s bridge to the unmanned surface vessel control station. This includes the deep understanding of all the relations between sea users with their habits, usual practices and the restrictions on their performance.
4.3. Lessons Learned from the Participation in the Unmanned Vessel Operation
Based on the considerations above, the following observations have been listed:
- The unmanned and autonomous vessels must be tested in real traffic conditions to obtain non-simulation data for further considerations, although a proper level of information and multiple back-up control methods must be ensured and provided to maintain at least the existing safety level of maritime operations.
- Taking into account all the restrictions related to the situational awareness sensors nowadays, radar provides the most valuable information to the operator on-shore. Improvements to vessels’ radar data transfer on-shore are needed.
- Self-diagnosis systems, including position determining devices, communication and power supply play crucial role in the vessel remote control process and should be taken into account in the autonomous units decision making algorithms. The redundancy of the positioning and movements parameters systems should be ensured, preferably using the cross-check methods.
- In the situation of a lack of regulations for unmanned vessels operator’s qualifications, it is the operating companies’ role to ensure that the proper people control this equipment. The extensive works towards the clarification of theoretical and practical training requirements for MASS operators will certainly be conducted in the near future, although it requires open discussion between education institutions, policy makers and industry representatives, where each voice, based on real experience, will be valuable.
5. Conclusions
The marine community, both research and industry, are working on increasing the ratio of unmanned systems, including full-size vessels, in operations at sea. The levels of control differ on those platforms, from remote operation beyond the line of sight to almost full autonomy on prototype vessels. However, the exploitation of this kind of vessel, at all control levels, requires solving a number of issues regarding the safety of the equipment, potential cargo and other sea users. The possible threats and related development areas have been discussed in this paper together with the author’s experience from the first unmanned transit across the English Channel.
Author Contributions
Conceptualization, A.F.; methodology, A.F., K.Z.; investigation, A.F., K.Z.; resources, K.Z.; writing—Original draft preparation, A.F., K.Z.; writing—Review and editing, K.Z. All authors have read and agree to the published version of the manuscript.
Funding
This research was funded by the Polish Naval Academy statutory funds for the research activities.
Acknowledgments
The authors would like to thank the SEA-KIT International Ltd. and Hushcraft Ltd. management for the possibility to actively participate in the first unmanned vessel transit from the UK to Belgium.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Autonomous Shipping Initiative for European Waters. Available online: https://trimis.ec.europa.eu/project/autonomous-shipping-initiative-european-waters#tab-outline (accessed on 9 June 2019).
- Rolls-Royce and Finferries Demonstrate World’s First Fully Autonomous Ferry. Available online: https://www.rolls-royce.com/media/press-releases/2018/03-12-2018-rr-and-finferries-demonstrate-worlds-first-fully-autonomous-ferry.aspx (accessed on 7 June 2019).
- YARA Selects Norwegian Shipbuilder VARD for Zero-Emission Vessel Yara Birkeland. Available online: https://www.yara.com/corporate-releases/yara-selects-norwegian-shipbuilder-vard-for-zero-emission-vessel-yara-birkeland/ (accessed on 9 June 2019).
- Acquisition of Rolls-Royce Commercial Marine. Available online: https://www.kongsberg.com/maritime/about-us/who-we-are-kongsberg-maritime/rolls-royce-commercial-marine-information/ (accessed on 18 December 2019).
- Final Report Summary—MUNIN (Maritime Unmanned Navigation through Intelligence in Networks). Available online: https://cordis.europa.eu/project/rcn/104631/reporting/en (accessed on 3 December 2019).
- Proctor, A.; Zarayskaya, Y.; Bazhenowa, E.; Sumiyoshi, M.; Wigley, R.A.; Roperez, J.; Zwolak, K.; Sattiabaruth, S.; Sade, H.; Tinmouth, N.; et al. Unlocking the Power of Combined Autonomous Operations with Underwater and Surface Vehicles: Success with a Deep-Water Survey AUV and USV Mothership. In Proceedings of the 2018 OCEANS, Kobe, Japan, 28–31 May 2018. [Google Scholar]
- Zwolak, K.; Simpson, B.; Anderson, R.; Bazhenowa, E.; Falconer, R.; Kearns, T.; Minami, H.; Roperez, J.; Rosedee, A.; Sade, H.; et al. An unmanned seafloor mapping system: The concept of an AUV integrated with the newly designed USV SEA-KIT. In Proceedings of the OCEANS, Aberdeen, UK, 19–22 June 2017. [Google Scholar]
- Zarayskaya, Y.; Wallace, C.; Wigley, R.A.; Zwolak, K.; Bazhenova, E.; Bohan, A.; Elsaied, M.; Roperez, J.; Sumiyoshi, M.; Sattiabaruth, S.; et al. GEBCO-NF Alumni Team Technology Solution for Shell Ocean Discovery XPRIZE Final Round. In Proceedings of the OCEANS, Marseille, France, 17–20 June 2019. [Google Scholar]
- SEA-KIT. Complete First ever International Commercial Unmanned Transit. Available online: https://www.oceannews.com/news/science-technology/sea-kit-complete-first-ever-international-commercial-unmanned-transit (accessed on 9 July 2019).
- Autonomous Boat Makes Oyster Run. Available online: https://www.bbc.com/news/science-environment-48216966 (accessed on 9 July 2019).
- Guidelines for Autonomous Shipping. Available online: https://www.bureauveritas.jp/news/pdf/641-NI_2017-12.pdf (accessed on 15 January 2020).
- Autonomous and Remotely Operated Ships. Available online: http://rules.dnvgl.com/docs/pdf/dnvgl/cg/2018-09/dnvgl-cg-0264.pdf (accessed on 15 January 2020).
- ShipRight Procedure—Autonomous Ships. Available online: https://www.lr.org/en/latest-news/lr-defines-autonomy-levels-for-ship-design-and-operation/ (accessed on 15 January 2020).
- Guidelines for Autonomous Cargo Ships. Available online: https://www.google.com.hk/search?safe=strict&source=hp&ei=1aweXvm0JtvmwQPM2pvABQ&q=Guidelines+for+Autonomous+Cargo+Ships%3B+CCS%3A+&oq=Guidelines+for+Autonomous+Cargo+Ships%3B+CCS%3A+&gs_l=psy-ab.3..33i160l5.28.28..700...0.0..0.135.135.0j1......0....2j1..gws-wiz.z4POokU6tCs&ved=0ahUKEwi58_qF-YTnAhVbc3AKHUztBlgQ4dUDCAU&uact=5 (accessed on 15 January 2020).
- IMO Takes First Steps to Address Autonomous Ships. Available online: http://www.imo.org/en/MediaCentre/PressBriefings/Pages/08-MSC-99-MASS-scoping.aspx (accessed on 19 December 2019).
- Burmeister, H.; Moræus, J. D8.7: Final Report: Autonomous Engine Room. Available online: http://www.unmanned-ship.org/munin/wp-content/uploads/2015/09/MUNIN-D8-7-Final-Report-Autonomous-Engine-Room-MSoft-final.pdf (accessed on 1 December 2019).
- Eder, B. Inaugural Francesco Berlingieri Lecture. Unmanned Vessels: Challenges Ahead. 2018. Available online: https://comitemaritime.org/wp-content/uploads/2018/05/Sir-Bernard-Eder-Berlingieri-Lecture-London-Assembly-2018-geconverteerd.pdf (accessed on 1 December 2019).
- Gu, Y.; Góez, J.; Guajardo, M.; Wallace, S.W. Autonomous Vessels: State of the Art and Potential Opportunities in Logistics. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=3448420 (accessed on 15 January 2020).
- Maritime Autonomous Surface Ships UK Code of Practice. Available online: https://www.maritimeuk.org/media-centre/publications/maritime-autonomous-surface-ships-uk-code-practice/ (accessed on 15 January 2020).
- Bratić, K.; Pavić, I.; Vukša, S.; Stazić, L. Review of Autonomous and Remotely Controlled Ships in Maritime Sector. Trans. Marit. Sci. 2019, 8, 253–265. [Google Scholar] [CrossRef]
- Poikonen, J.; Hyvonen, M.; Kolu, A.; Jokela, T.; Tissari, J.; Paasio, A. Remote and autonomous ships—The Next Steps. Technology. 2016. Available online: https://www.rolls-royce.com/~/media/Files/R/Rolls-Royce/documents/customers/marine/ship-intel/aawa-whitepaper-210616.pdf (accessed on 1 December 2019).
- Buesnel, G.; Pottle, J.; Holbrow, M.; Crampton, P. Make it Real: Developing a Test Framework for PNT Systems and Devices, GPS World. Available online: https://www.gpsworld.com/make-it-real-developing-a-test-framework-for-pnt-systems-and-devices (accessed on 5 June 2019).
- GPS Disrupted for Maritime in Mediterranean, Red Sea. Available online: https://www.gpsworld.com/gps-disrupted-for-maritime-in-mediterranean-red-sea/ (accessed on 1 December 2019).
- Son, P.W.; Rhee, J.H.; Han, Y.; Seo, K.; Seo, J. Preliminary study of the re-radiation effect of Loran signal to improve the positioning accuracy. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 23–26 April 2018. [Google Scholar]
- Thombre, S.; Bhuiyan, M.; Eliardsson, P.; Gabrielsson, B.; Pattinson, M.; Dumville, M.; Kuusniemi, H. GNSS Threat Monitoring and Reporting: Past, Present, and a Proposed Future. J. Navig. 2018, 71, 513–529. [Google Scholar] [CrossRef]
- Ying, Y.; Whitworth, T.; Sheridan, K. GNSS interference detection with software defined radio. In Proceedings of the IEEE First AESS European Conference on Satellite Telecommunications, Rome, Italy, 2–5 October 2012. [Google Scholar]
- GlobalTop Technology Inc. Gmm-u5j GPS Module Data Sheet. Available online: http://download.maritex.com.pl/pdfs/wi/GPSGMMU5J.pdf (accessed on 5 June 2019).
- Demiral, E.; Bayer, D. Further Studies on the COLREGs. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2015, 9, 17–23. [Google Scholar] [CrossRef]
- Ziarati, R.; Ziarati, M. Review of Accidents with Special References to Vessels with Automated Systems—A Way Forward. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.665.5802&rep=rep1&type=pdf (accessed on 10 July 2019).
- Batalden, B.; Sydnes, A. What causes ‘very serious’ maritime accidents? In Safety and Reliability—Theory and Applications; Taylor & Francis Group: London, UK, 2017; pp. 3067–3074. [Google Scholar]
- Karvonen, H.; Martio, J. Human Factors Issues in Maritime Autonomous Surface Ship Systems Development. In Proceedings of the 1st International Conference on Maritime Autonomous Surface Ships, Busan, Korea, 8–9 November 2018. [Google Scholar]
- Pietrzykowki, Z.; Uriasz, J. The Ship Domain—A Criterion of Navigational Safety Assessment in an Open Sea Area. J. Navig. 2009, 62, 93–108. [Google Scholar] [CrossRef]
- Wielgosz, M. Ship Domain in Open Sea Areas and Restricted Waters. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 99–104. [Google Scholar] [CrossRef]
- Wei, P.; Cagle, L.; Reza, T.; Ball, J.; Gafford, J. LiDAR and Camera Detection Fusion in a Real Time Industrial Multi-Sensor Collision Avoidance System. Electronics 2018, 7, 84. [Google Scholar] [CrossRef]
- Naeem, W.; Irwin, G.; Yang, A. COLREGs-based collision avoidance strategies for unmanned surface vehicles. Mechatronics 2012, 22, 669–678. [Google Scholar] [CrossRef]
- Lee, M.C.; Nieh, C.Y.; Kuo, H.C.; Huang, J.C. An automatic collision avoidance and route generating algorithm for ships based on field model. J. Mar. Sci. Technol. 2019, 27, 101–113. [Google Scholar]
- Nakamura, S.; Okada, N. Development of automatic collision avoidance system and quantitative evaluation of the maneuvering results. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 133–141. [Google Scholar] [CrossRef]
- Nakamura, S.; Okada, N.; Kuwahara, S.; Kutsuna, K.; Nakashima, T.; Ando, H. Study on Automatic Collision Avoidance System and Method for Evaluating Collision Avoidance Maneuvering Results. J. Phys. Conf. Ser. 2019, 1357, 012033. [Google Scholar] [CrossRef]
- Porathe, T. Interaction between Manned and Autonomous Ships: Automation Transparency. In Proceedings of the 1st International Conference on Maritime Autonomous Surface Ships, Busan, Korea, 8–9 November 2018. [Google Scholar]
- Campbell, S.; Naeem, W.; Irwin, G. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance maneuvers. Annu. Rev. Control 2012, 36, 267–283. [Google Scholar] [CrossRef]
- UK Government Supporting E-LORAN. Available online: https://www.maritimejournal.com/news101/onboard-systems/navigation-and-communication/uk-government-supporting-e-loran (accessed on 2 July 2019).
- eLoran Standards Published—SAE. Available online: https://rntfnd.org/2018/09/21/eloran-standards-published-sae/ (accessed on 6 July 2019).
- South Korea Relaunches Its eLoran Program. Available online: https://insidegnss.com/south-korea-relaunches-its-eloran-program/ (accessed on 6 July 2019).
- R-Mode Baltic. Available online: https://www.dlr.de/kn/en/desktopdefault.aspx/tabid-4308/6940_read-52591/ (accessed on 4 December 2019).
- Ziebold, R.; Medina, D.; Romanovas, M.; Lass, C.; Gewies, S. Performance Characterization of GNSS/IMU/DVL Integration under Real Maritime Jamming Conditions. Sensors 2018, 18, 2954. [Google Scholar] [CrossRef] [PubMed]
- Felski, A. Methods of Improving the Jamming Resistance of GNSS Receiver. Annu. Navig. 2016, 23, 185–198. [Google Scholar] [CrossRef]
- First Test Area for Autonomous Ships Opened in Finland. Available online: https://worldmaritimenews.com/archives/227275/first-test-area-for-autonomous-ships-opened-in-finland/ (accessed on 11 July 2019).
- First Unmanned Vessel Joins UK Ship Register. Available online: https://worldmaritimenews.com/archives/235207/first-unmanned-vessel-joins-uk-ship-register/ (accessed on 2 December 2019).
- The Strait of Dover—The Busiest Shipping Route in the World. Available online: https://www.marineinsight.com/marine-navigation/the-strait-of-dover-the-busiest-shipping-route-in-the-world/ (accessed on 9 July 2019).
- SEA-KIT Docks in Belgium to Complete First ever International Commercial Uncrewed Transit. Available online: http://www.sea-kit.com/sea-kit-docks-in-belgium-to-complete-first-ever-international-commercial-uncrewed-transit/ (accessed on 10 July 2019).
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).