
Distance-Independent Background Light Estimation Method

Abstract
:1. Introduction
2. Related Work
- A distance-independent method for solving background light is proposed, which is more suitable for color correction and does not require additional image enhancement operations or hardware resources.
- By utilizing spatial resolution and similarity between adjacent frames, the proposed method offers high computational efficiency.
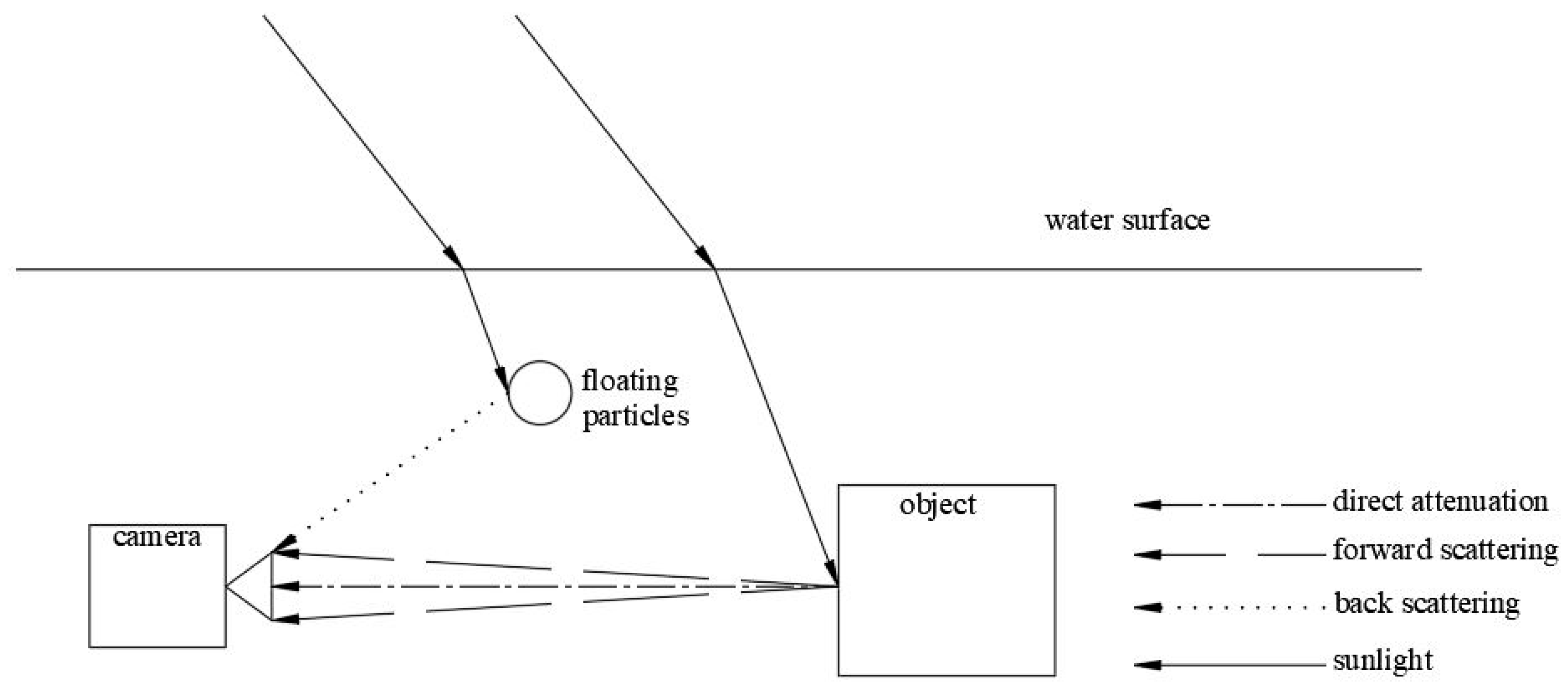
3. Background
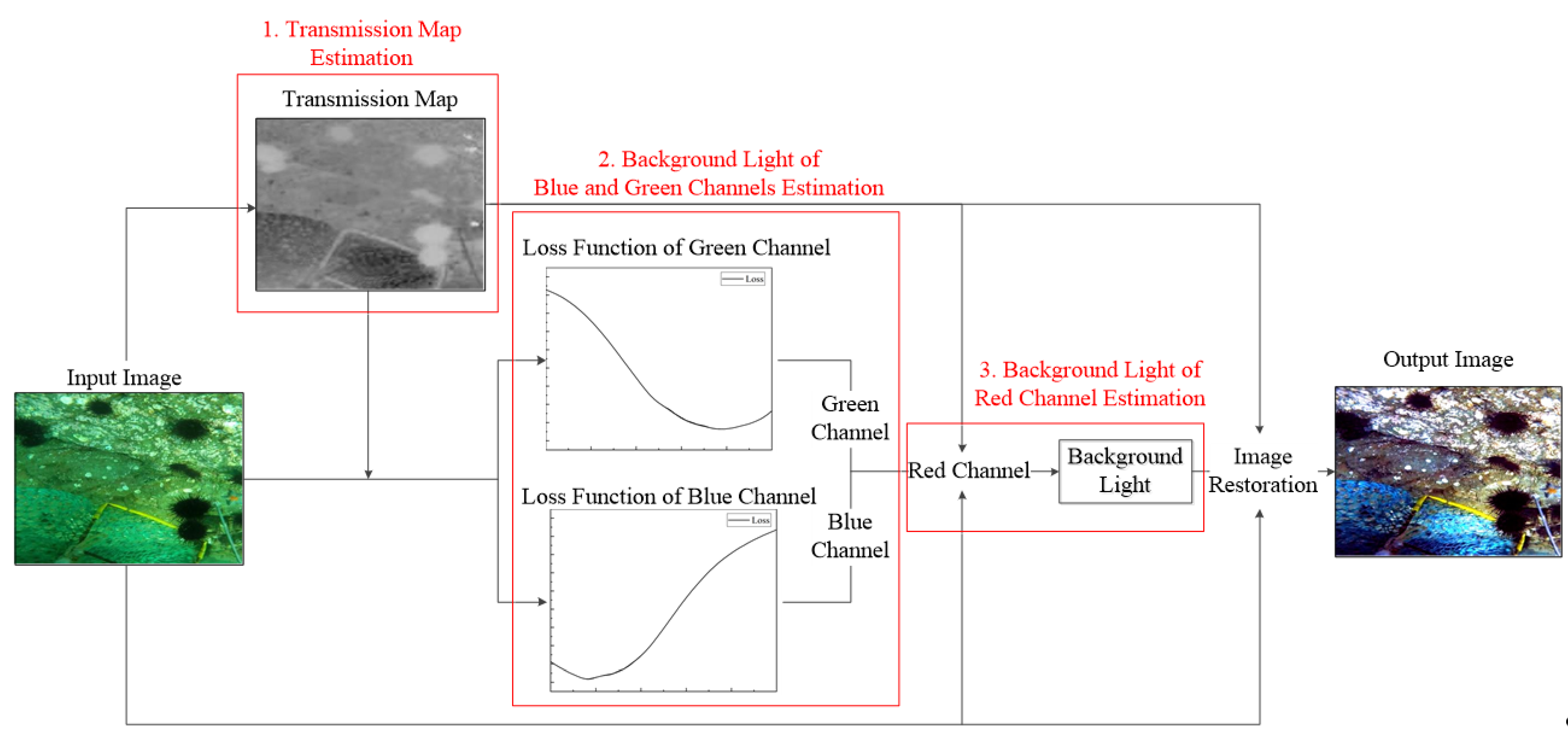
4. The Proposed Method
4.1. Transmission Map Estimation
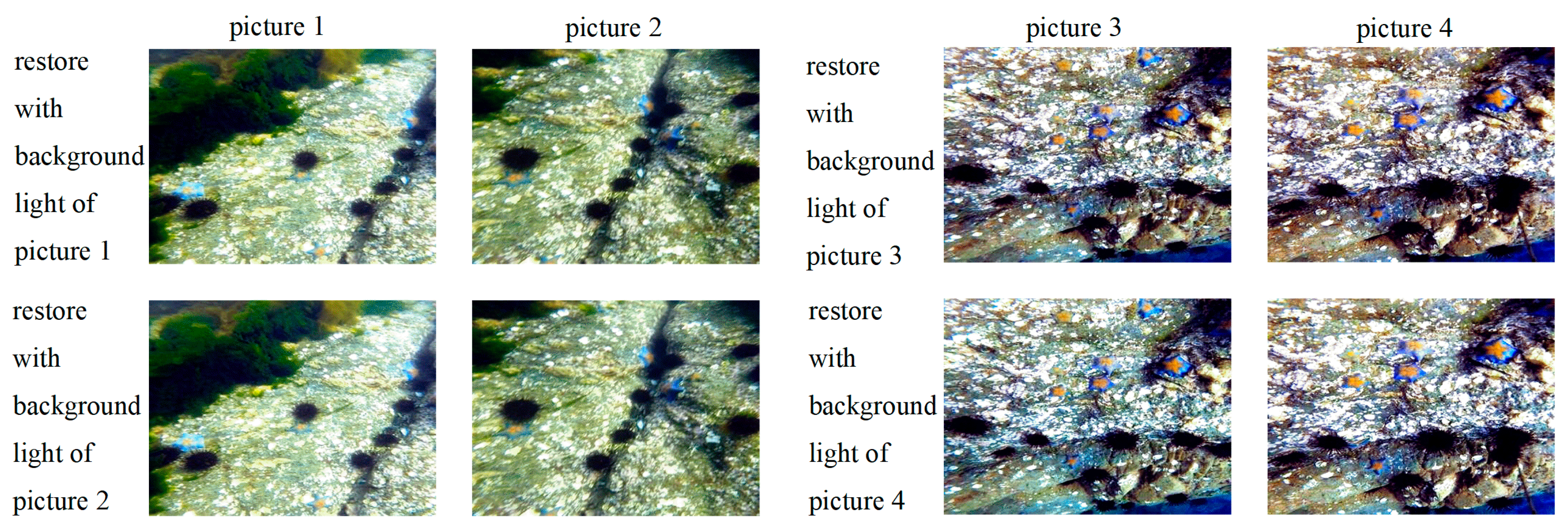
4.2. Background Light of Blue and Green Channels Estimation
4.3. Background Light of Red Channel Estimation
- The Caltech-UCSD Birds-200-2011 Dataset (http://www.vision.caltech.edu/datasets/cub_200_2011/, accessed on 20 March 2023) [31]. This is a natural image dataset for bird image classification, which includes 11,788 images covering 200 bird species.
- CBCL Street Scenes Dataset (http://cbcl.mit.edu/software-datasets/streetscenes/, accessed on 20 March 2023) [32]. This is a dataset of street scene images captured by a DSC-F717 camera from Boston and its surrounding areas in Massachusetts, belonging to the category of natural image datasets, with a total of 3547 images.
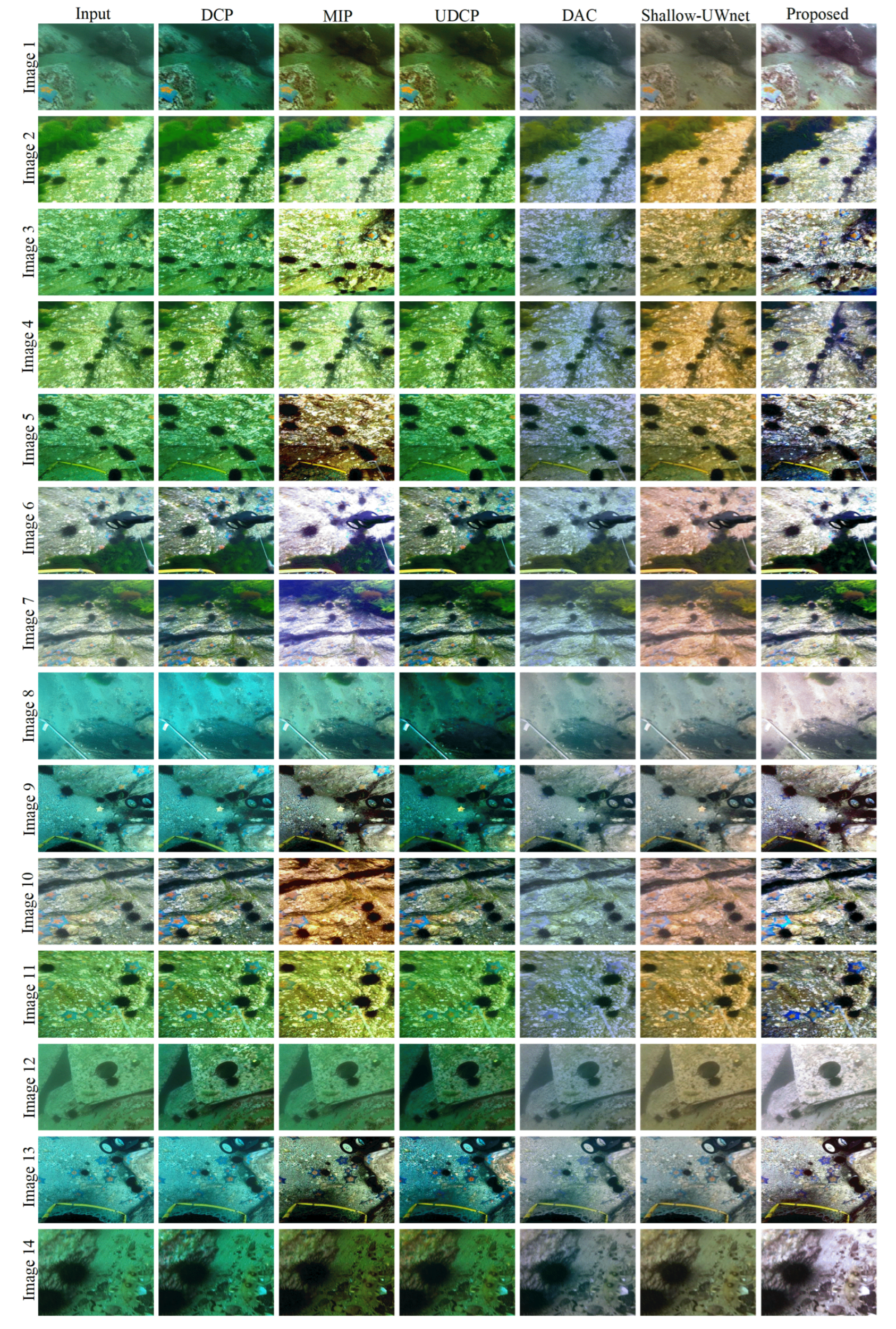
- Real World Underwater Image Enhancement dataset (https://github.com/dlut-dimt/Realworld-Underwater-Image-Enhancement-RUIE-Benchmark, accessed on 20 March 2023) [33]. This underwater image dataset was collected from a real ocean environment testing platform consisting of 4231 images. The dataset is characterized by its large data size, diverse degree of light scattering effects, rich color tones, and abundant detection targets.
4.4. Strategies to Speed Up
5. Experimental Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Carlevaris-Bianco, N.; Mohan, A.; Eustice, R.M. Initial results in underwater single image dehazing. In Proceedings of the Oceans 2010 Mts/IEEE Seattle, Seattle, WA, USA, 20–23 September 2010; pp. 1–8. [Google Scholar]
- Lai, Y.; Zhou, Z.; Su, B.; Zhe, X.; Tang, J.; Yan, J.; Liang, W.; Chen, J. Single underwater image enhancement based on differential attenuation compensation. Front. Mar. Sci. 2022, 9, 1047053. [Google Scholar] [CrossRef]
- McGlamery, B. A computer model for underwater camera systems. In Proceedings of the Ocean Optics VI; SPIE: Bellingham, WA, USA, 1980; pp. 221–231. [Google Scholar]
- Jaffe, J.S. Computer modeling and the design of optimal underwater imaging systems. IEEE J. Ocean. Eng. 1990, 15, 101–111. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Single Image Haze Removal Using Dark Channel Prior. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2341–2353. [Google Scholar] [CrossRef] [PubMed]
- Drews, P., Jr.; do Nascimento, E.; Moraes, F.; Botelho, S.; Campos, M. Transmission Estimation in Underwater Single Images. In Proceedings of the 2013 IEEE International Conference on Computer Vision Workshops, Sydney, Australia, 2–8 December 2013; pp. 825–830. [Google Scholar]
- Song, W.; Wang, Y.; Huang, D.; Tjondronegoro, D. A rapid scene depth estimation model based on underwater light attenuation prior for underwater image restoration. In Proceedings of the Pacific Rim Conference on Multimedia, Hefei, China, 21–22 September 2018; pp. 678–688. [Google Scholar]
- Li, C.; Quo, J.; Pang, Y.; Chen, S.; Wang, J. Single underwater image restoration by blue-green channels dehazing and red channel correction. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 1731–1735. [Google Scholar]
- Liang, Z.; Wang, Y.; Ding, X.; Mi, Z.; Fu, X. Single underwater image enhancement by attenuation map guided color correction and detail preserved dehazing. Neurocomputing 2021, 425, 160–172. [Google Scholar] [CrossRef]
- Ding, X.; Liang, Z.; Wang, Y.; Fu, X. Depth-aware total variation regularization for underwater image dehazing. Signal Process. Image Commun. 2021, 98, 116408. [Google Scholar] [CrossRef]
- Emberton, S.; Chittka, L.; Cavallaro, A. Underwater image and video dehazing with pure haze region segmentation. Comput. Vis. Image Underst. 2018, 168, 145–156. [Google Scholar] [CrossRef]
- Ancuti, C.O.; Ancuti, C.; De Vleeschouwer, C.; Sbetr, M. Color Channel Transfer for Image Dehazing. IEEE Signal Process. Lett. 2019, 26, 1413–1417. [Google Scholar] [CrossRef]
- Li, T.; Wang, J.; Yao, K. Visibility enhancement of underwater images based on active polarized illumination and average filtering technology. Alex. Eng. J. 2022, 61, 701–708. [Google Scholar] [CrossRef]
- Dai, C.; Lin, M.; Wu, X.; Wang, Z.; Guan, Z. Single underwater image restoration by decomposing curves of attenuating color. Opt. Laser Technol. 2020, 123, 105947. [Google Scholar] [CrossRef]
- Peng, Y.-T.; Cosman, P.C. Underwater image restoration based on image blurriness and light absorption. IEEE Trans. Image Process. 2017, 26, 1579–1594. [Google Scholar] [CrossRef]
- Ke, K.; Zhang, C.; Wang, Y.; Zhang, Y.; Yao, B. Single underwater image restoration based on color correction and optimized transmission map estimation. Meas. Sci. Technol. 2023, 34, 055408. [Google Scholar] [CrossRef]
- Wang, X.; Tao, C.; Zheng, Z.J.O.; Engineering, L.i. Occlusion-aware light field depth estimation with view attention. Opt. Lasers Eng. 2023, 160, 107299. [Google Scholar] [CrossRef]
- Zhan, F.; Yu, Y.; Zhang, C.; Wu, R.; Hu, W.; Lu, S.; Ma, F.; Xie, X.; Shao, L. Gmlight: Lighting estimation via geometric distribution approximation. IEEE Trans. Image Process. 2022, 31, 2268–2278. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, X.; An, D.; Wei, Y. Underwater image enhancement and marine snow removal for fishery based on integrated dual-channel neural network. Comput. Electron. Agric. 2021, 186, 106182. [Google Scholar] [CrossRef]
- Wang, K.; Shen, L.; Lin, Y.; Li, M.; Zhao, Q. Joint Iterative Color Correction and Dehazing for Underwater Image Enhancement. IEEE Robot. Autom. Lett. 2021, 6, 5121–5128. [Google Scholar] [CrossRef]
- Zong, X.; Chen, Z.; Wang, D.J.A.I. Local-CycleGAN: A general end-to-end network for visual enhancement in complex deep-water environment. Appl. Intell. 2021, 51, 1947–1958. [Google Scholar] [CrossRef]
- Zhu, S.; Luo, W.; Duan, S. Enhancement of Underwater Images by CNN-Based Color Balance and Dehazing. Electronics 2022, 11, 2537. [Google Scholar] [CrossRef]
- Hong, L.; Wang, X.; Xiao, Z.; Zhang, G.; Liu, J. WSUIE: Weakly Supervised Underwater Image Enhancement for Improved Visual Perception. IEEE Robot. Autom. Lett. 2021, 6, 8237–8244. [Google Scholar] [CrossRef]
- Gui, X.; Zhang, R.; Cheng, H.; Tian, L.; Chu, J. Multi-Turbidity Underwater Image Restoration Based on Neural Network and Polarization Imaging. Laser Optoelectron. Prog. 2022, 59, 0410001. [Google Scholar] [CrossRef]
- Tang, Z.; Li, J.; Huang, J.; Wang, Z.; Luo, Z. Multi-scale convolution underwater image restoration network. Mach. Vis. Appl. 2022, 33, 85. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, W.; Li, L.; Jiao, H.; Li, Y.; Guo, L.; Xu, J. A framework for the efficient enhancement of non-uniform illumination underwater image using convolution neural network. Comput. Graph. 2023, 112, 60–71. [Google Scholar] [CrossRef]
- Han, J.; Shoeiby, M.; Malthus, T.; Botha, E.; Anstee, J.; Anwar, S.; Wei, R.; Armin, M.A.; Li, H.; Petersson, L. Underwater Image Restoration via Contrastive Learning and a Real-World Dataset. Remote Sens. 2022, 14, 4297. [Google Scholar] [CrossRef]
- Jamil, S.; Piran, M.J.; Rahman, M.; Kwon, O.-J. Learning-driven lossy image compression: A comprehensive survey. Eng. Appl. Artif. Intell. 2023, 123, 106361. [Google Scholar] [CrossRef]
- Han, M.; Lyu, Z.; Qiu, T.; Xu, M. A review on intelligence dehazing and color restoration for underwater images. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 1820–1832. [Google Scholar] [CrossRef]
- Li, C.-Y.; Guo, J.-C.; Cong, R.-M.; Pang, Y.-W.; Wang, B. Underwater Image Enhancement by Dehazing With Minimum Information Loss and Histogram Distribution Prior. IEEE Trans. Image Process. 2016, 26, 5664–5677. [Google Scholar] [CrossRef] [PubMed]
- Welinder, P.; Branson, S.; Mita, T.; Wah, C.; Schroff, F.; Belongie, S.; Perona, P. Caltech-UCSD birds 200. In Computation & Neural Systems Technical Report,2010–001; California Institute of Technology: Pasadena, CA, USA, 2010. [Google Scholar]
- Korc, F.; Förstner, W. University of Bonn, Tech. Rep. TR-IGG-P-01. eTRIMS Image Database for Interpreting Images of Man-Made Scenes; University of Bonn: Bonn, Germany, 2009. [Google Scholar]
- Liu, R.; Fan, X.; Zhu, M.; Hou, M.; Luo, Z. Real-World Underwater Enhancement: Challenges, Benchmarks, and Solutions Under Natural Light. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 4861–4875. [Google Scholar] [CrossRef]
- Naik, A.; Swarnakar, A.; Mittal, K.; Assoc Advancement Artificial, I. Shallow-UWnet: Compressed Model for Underwater Image Enhancement (Student Abstract). In Proceedings of the 35th AAAI Conference on Artificial Intelligence/33rd Conference on Innovative Applications of Artificial Intelligence/11th Symposium on Educational Advances in Artificial Intelligence, Virtual, 2–9 February 2021; pp. 15853–15854. [Google Scholar]
- Yang, M.; Sowmya, A. An Underwater Color Image Quality Evaluation Metric. IEEE Trans. Image Process. A Publ. IEEE Signal Process. Soc. 2015, 24, 6062–6071. [Google Scholar] [CrossRef]
- Panetta, K.; Gao, C.; Agaian, S. Human-Visual-System-Inspired Underwater Image Quality Measures. IEEE J. Ocean. Eng. 2016, 41, 541–551. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | DCP | MIP | UDCP | DAC | Shallow-UWnet | Proposed |
|---|---|---|---|---|---|---|
| Time (s) | 0.1822 | 0.2493 | 0.2166 | 1.7272 | 0.2227 | 0.3345 |
| IDE | Pycharm | Pycharm | Pycharm | MATLAB | Pycharm | Pycharm |
| Hardware | CPU | CPU | CPU | CPU | GPU | CPU |
| Image | Origin | DCP | MIP | UDCP | DAC | Shallow-UWnet | Proposed |
|---|---|---|---|---|---|---|---|
| 1 | 0.2722 | 0.3790 | 0.3730 | 0.3947 | 0.2255 | 0.2290 | 0.3896 |
| 2 | 0.3609 | 0.3917 | 0.3808 | 0.4015 | 0.3874 | 0.3967 | 0.4234 |
| 3 | 0.3751 | 0.407 | 0.4285 | 0.4222 | 0.3491 | 0.3779 | 0.4568 |
| 4 | 0.3752 | 0.4053 | 0.3771 | 0.4175 | 0.3679 | 0.4026 | 0.4099 |
| 5 | 0.4298 | 0.4385 | 0.4961 | 0.4587 | 0.4022 | 0.4185 | 0.4968 |
| 6 | 0.3630 | 0.4035 | 0.4137 | 0.4510 | 0.3589 | 0.4545 | 0.4916 |
| 7 | 0.3224 | 0.408 | 0.3533 | 0.4583 | 0.3122 | 0.4183 | 0.4616 |
| 8 | 0.375 | 0.4149 | 0.3632 | 0.4910 | 0.2577 | 0.2555 | 0.3985 |
| 9 | 0.4489 | 0.4572 | 0.4625 | 0.5156 | 0.3707 | 0.3927 | 0.5052 |
| 10 | 0.3888 | 0.4174 | 0.4588 | 0.434 | 0.3617 | 0.3967 | 0.4479 |
| 11 | 0.3148 | 0.4020 | 0.4987 | 0.4295 | 0.2966 | 0.4397 | 0.4671 |
| 12 | 0.2854 | 0.3990 | 0.3106 | 0.3835 | 0.2149 | 0.2366 | 0.3536 |
| 13 | 0.4681 | 0.4708 | 0.4680 | 0.5152 | 0.3664 | 0.3709 | 0.4964 |
| 14 | 0.3713 | 0.4125 | 0.3947 | 0.3605 | 0.3109 | 0.2725 | 0.4265 |
| Average | 0.3679 | 0.4148 | 0.4128 | 0.4381 | 0.3273 | 0.3616 | 0.4446 |
| Image | Origin | DCP | MIP | UDCP | DAC | Shallow-UWnet | Proposed |
|---|---|---|---|---|---|---|---|
| 1 | −0.8400 | −0.2123 | −0.2165 | −0.3135 | −0.8632 | −0.3081 | −0.2368 |
| 2 | −0.2399 | 0.1390 | −0.2809 | 0.2300 | −0.3355 | −0.0169 | 0.1813 |
| 3 | 0.0389 | 0.4613 | 0.5522 | 0.6048 | −0.2648 | 0.0105 | 0.9704 |
| 4 | −0.2021 | 0.1858 | −0.2702 | 0.2522 | −0.3302 | −0.0475 | 0.2504 |
| 5 | 0.2519 | 0.4889 | 1.5800 | 0.6816 | −0.1267 | 0.2372 | 1.4260 |
| 6 | −0.3721 | 0.0374 | 0.2101 | 0.3436 | −0.4271 | −0.2427 | 0.5991 |
| 7 | −0.5682 | −0.1038 | −0.0442 | 0.4378 | −0.5846 | −0.4666 | 0.3336 |
| 8 | −0.2644 | 0.1885 | −0.3574 | 0.6283 | −0.6318 | −0.649 | −0.2960 |
| 9 | 0.3213 | 0.3925 | 0.9095 | 0.892 | −0.1506 | −0.1994 | 0.7112 |
| 10 | −0.0872 | 0.3457 | 0.6865 | 0.4386 | −0.3144 | −0.0487 | 0.7507 |
| 11 | −0.4421 | 0.1594 | 0.9140 | 0.5198 | −0.4638 | −0.4826 | 0.8586 |
| 12 | −0.6686 | −0.2113 | −0.6194 | 0.0549 | −0.7350 | −0.4215 | −0.2384 |
| 13 | 0.4338 | 0.5377 | 1.1882 | 1.0858 | −0.2229 | −0.3031 | 0.6632 |
| 14 | −0.4251 | −0.0212 | 0.3275 | −0.3393 | −0.4701 | −0.3526 | −0.3487 |
| Average | −0.2188 | 0.1705 | 0.3271 | 0.394 | −0.4229 | −0.2351 | 0.4018 |
| Image | Origin | DCP | MIP | UDCP | DAC | Shallow-UWnet | Proposed |
|---|---|---|---|---|---|---|---|
| 1 | 0.0291 | 0.0393 | 0.0446 | 0.0447 | 0.0646 | 0.0569 | 0.2923 |
| 2 | 0.0387 | 0.0454 | 0.0688 | 0.0372 | 0.1490 | 0.0346 | 0.2191 |
| 3 | 0.0329 | 0.0387 | 0.0824 | 0.033 | 0.1026 | 0.0264 | 0.261 |
| 4 | 0.0349 | 0.0434 | 0.054 | 0.0368 | 0.1175 | 0.0215 | 0.2474 |
| 5 | 0.0344 | 0.0370 | 0.1401 | 0.034 | 0.1171 | 0.0376 | 0.2812 |
| 6 | 0.0869 | 0.1049 | 0.2182 | 0.1091 | 0.1028 | 0.2900 | 0.2728 |
| 7 | 0.1088 | 0.1149 | 0.1598 | 0.1152 | 0.0934 | 0.2792 | 0.2269 |
| 8 | 0.0113 | 0.0120 | 0.0229 | 0.0368 | 0.049 | 0.0772 | 0.3443 |
| 9 | 0.0458 | 0.0434 | 0.2114 | 0.0746 | 0.0987 | 0.1818 | 0.3464 |
| 10 | 0.0428 | 0.0515 | 0.0601 | 0.0419 | 0.1015 | 0.0332 | 0.2266 |
| 11 | 0.114 | 0.1353 | 0.1437 | 0.1331 | 0.0669 | 0.3108 | 0.2602 |
| 12 | 0.0211 | 0.0467 | 0.0259 | 0.0484 | 0.0573 | 0.0176 | 0.2991 |
| 13 | 0.0643 | 0.0582 | 0.1629 | 0.1207 | 0.1053 | 0.1563 | 0.331 |
| 14 | 0.0174 | 0.0275 | 0.0826 | 0.0517 | 0.0915 | 0.0346 | 0.294 |
| Average | 0.0487 | 0.0570 | 0.1055 | 0.0655 | 0.0941 | 0.1113 | 0.2787 |
| Image | Origin | DCP | MIP | UDCP | DAC | Shallow-UWnet | Proposed |
|---|---|---|---|---|---|---|---|
| 1 | −0.7381 | −0.3839 | 3.7792 | 2.2919 | −1.9772 | 17.6672 | 17.2558 |
| 2 | 4.9669 | 5.4557 | 4.0874 | 5.0828 | 9.0464 | 14.4282 | 14.5248 |
| 3 | 5.3565 | 5.3235 | 8.2615 | 4.7840 | 5.2131 | 14.7446 | 16.8768 |
| 4 | 3.7914 | 4.5229 | 2.7446 | 4.2913 | 6.3745 | 9.9716 | 17.1822 |
| 5 | 4.8659 | 4.5921 | 15.3959 | 4.1764 | 4.9793 | 17.2987 | 17.6408 |
| 6 | 4.9898 | 5.6814 | 15.6180 | 4.9501 | 5.3688 | 14.4294 | 17.4807 |
| 7 | 4.8346 | 4.3226 | 15.9747 | 3.6215 | 4.5631 | 9.7244 | 15.6106 |
| 8 | 4.9449 | 5.0272 | 5.2024 | 0.7624 | 3.5792 | 4.2325 | 15.1843 |
| 9 | 5.4198 | 4.8146 | 13.1484 | 3.4475 | 5.7817 | 13.3738 | 17.2481 |
| 10 | 5.0785 | 5.2059 | 8.3004 | 4.8098 | 5.1170 | 11.5138 | 17.2416 |
| 11 | 5.0306 | 6.2061 | 8.2831 | 5.7368 | 4.1944 | 7.3071 | 17.4254 |
| 12 | 3.5741 | 1.4052 | 1.7001 | −1.3721 | 1.6424 | 14.6708 | 16.9075 |
| 13 | 6.2110 | 5.7990 | 11.1680 | 6.4725 | 5.4693 | 9.8003 | 18.1152 |
| 14 | 0.9821 | 1.8303 | 7.3491 | 0.2730 | 2.7675 | 13.1950 | 10.2711 |
| Average | 4.2363 | 4.2716 | 8.6438 | 3.5234 | 4.4371 | 12.3112 | 16.3546 |
| Image | Origin | DCP | MIP | UDCP | DAC | Shallow-UWnet | Proposed |
|---|---|---|---|---|---|---|---|
| 1 | 6.4746 | 6.6325 | 6.993 | 6.9564 | 6.4891 | 6.4818 | 7.4472 |
| 2 | 7.5963 | 7.5738 | 7.7616 | 7.5553 | 7.3026 | 7.4749 | 7.8655 |
| 3 | 7.3334 | 7.459 | 7.7236 | 7.3815 | 7.1283 | 7.2481 | 7.7627 |
| 4 | 7.5308 | 7.6079 | 7.7275 | 7.5382 | 7.2805 | 7.4499 | 7.8300 |
| 5 | 7.5362 | 7.4825 | 7.8325 | 7.4762 | 7.3261 | 7.4873 | 7.7172 |
| 6 | 7.5771 | 7.6552 | 7.4784 | 7.5963 | 7.502 | 7.4921 | 7.6124 |
| 7 | 7.4291 | 7.3635 | 7.7968 | 7.5028 | 7.2571 | 7.3375 | 7.9253 |
| 8 | 6.765 | 6.9913 | 7.1735 | 6.4368 | 6.8517 | 6.7923 | 7.4940 |
| 9 | 7.5079 | 7.4011 | 7.7481 | 7.219 | 7.5068 | 7.4889 | 7.8966 |
| 10 | 7.2536 | 7.4224 | 7.6655 | 7.3088 | 7.0689 | 7.1571 | 7.6892 |
| 11 | 7.3948 | 7.6695 | 7.8462 | 7.6124 | 7.2622 | 7.2871 | 7.7604 |
| 12 | 6.659 | 7.1119 | 6.7411 | 6.7670 | 6.6057 | 6.6583 | 7.3675 |
| 13 | 7.4904 | 7.431 | 7.5626 | 7.6088 | 7.4993 | 7.4456 | 7.9022 |
| 14 | 6.9208 | 6.9743 | 6.7258 | 6.7058 | 7.0053 | 6.9624 | 7.8121 |
| Average | 7.2478 | 7.3411 | 7.484 | 7.2618 | 7.149 | 7.1974 | 7.7202 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, A.; Wang, Y.; Zhou, S. Distance-Independent Background Light Estimation Method. J. Mar. Sci. Eng. 2023, 11, 1058. https://doi.org/10.3390/jmse11051058
Yu A, Wang Y, Zhou S. Distance-Independent Background Light Estimation Method. Journal of Marine Science and Engineering. 2023; 11(5):1058. https://doi.org/10.3390/jmse11051058
Chicago/Turabian StyleYu, Aidi, Yujia Wang, and Sixing Zhou. 2023. "Distance-Independent Background Light Estimation Method" Journal of Marine Science and Engineering 11, no. 5: 1058. https://doi.org/10.3390/jmse11051058
APA StyleYu, A., Wang, Y., & Zhou, S. (2023). Distance-Independent Background Light Estimation Method. Journal of Marine Science and Engineering, 11(5), 1058. https://doi.org/10.3390/jmse11051058