
VERDA: A Multisampler Tool for Mesopelagic Nets


Abstract
1. Introduction
2. Materials and Methods
2.1. Midwater Trawl
2.2. Sampling Protocol
2.3. Organisms Studied
3. Results
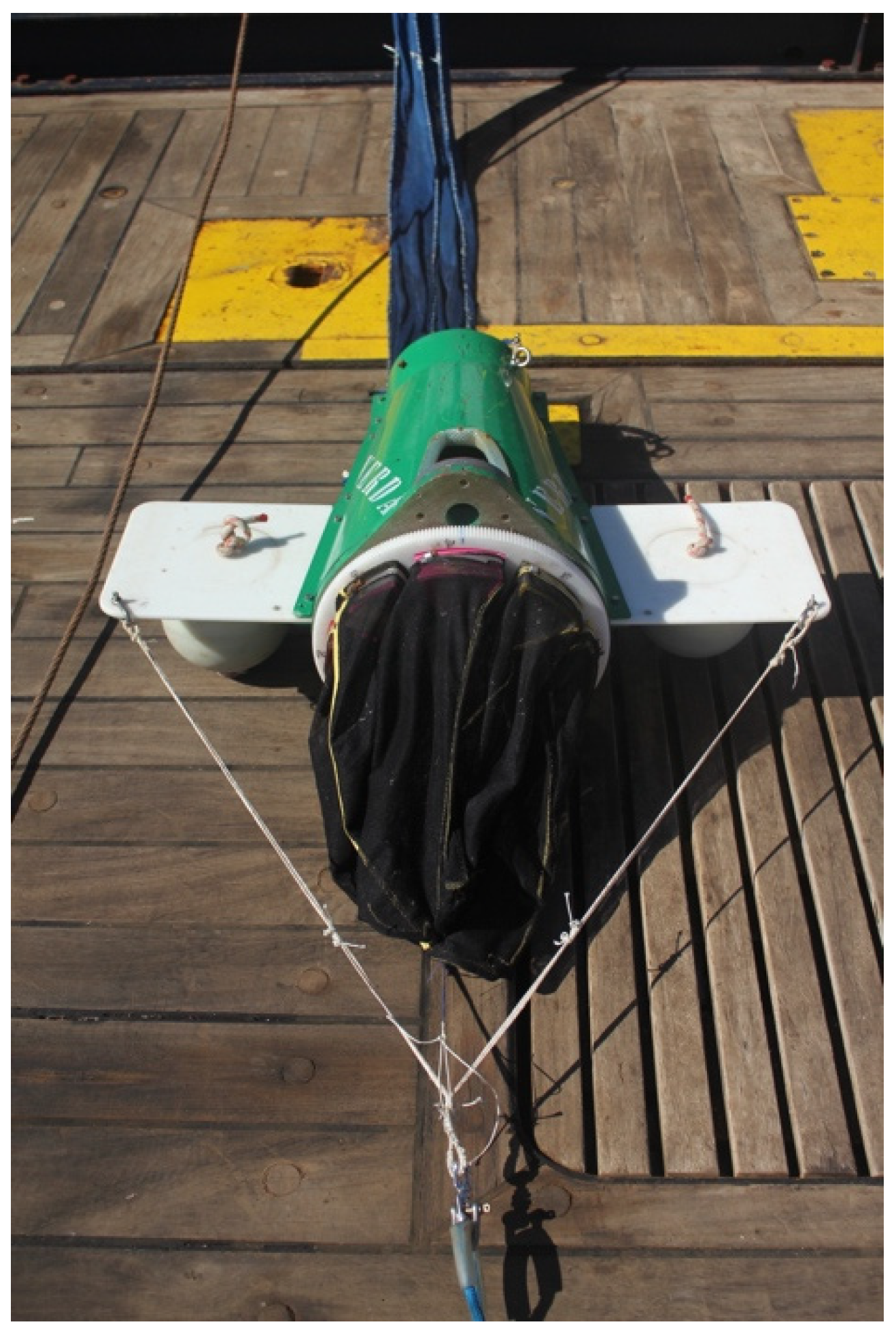
3.1. Design of the VERDA Multisampler
VERDA Vehicle
3.2. Plate and Pinion
3.3. Control Unit
- In the water: start to submerge (5 m deep);
- Arrived at the maximum depth (in setup);
- Arrived at layer “n”;
- Sinking or rising.
3.4. Collection of Organisms
4. Discussion
4.1. Investigations on Distribution Patterns
4.2. Future Research Directions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wiebe, P.H.; Benfield, M.C. From the Hensen net toward four-dimensional biological oceanography. Prog. Oceanogr. 2003, 56, 7–136. [Google Scholar] [CrossRef]
- Wiebe, P.; Morton, A.W.; Bradley, A.M.; Backus, R.H.; Craddock, J.E.; Barber, V.; Cowles, T.J.; Flierl, G.R. New development in the MOCNESS, an apparatus for sampling zooplankton and micronekton. Mar. Biol. 1985, 87, 313–323. [Google Scholar] [CrossRef]
- Sameoto, D.D.; Jaroszynski, L.O.; Fraser, W.B. BIONESS, a New Design in Multiple Net Zooplankton Samplers. Can. J. Fish. Aquat. Sci. 1980, 37, 722–724. [Google Scholar] [CrossRef]
- Dimmler, W.; Klindt, H. A new electronic system for the rectangular midwater trawl (RMT). Mar. Biol. 1990, 107, 345–348. [Google Scholar] [CrossRef]
- Davies, I.E.; Barham, E.G. The Tucker opening-closing micronekton net and its performance in a study of the deep scattering layer. Mar. Biol. 1969, 2, 127–131. [Google Scholar] [CrossRef]
- Weikert, H. and John, H.C. Experiences with a modified Bé multiple opening-closing plankton net. J. Plankton Res. 1981, 3, 167–176. [Google Scholar] [CrossRef]
- Besançon, H.C. The ISAACS-KIDD midwater trawl (IKMT): Experiences with a new way of rigging. In ICES, Gear and Behavior Committee; International Council for the Exploration of the Sea: Copenhagen, Denmark, 1973; C.M. 1973/B:5. [Google Scholar]
- McNeely, R.L. Development of the John M. Cobb pelagic trawl–A progress report. Commer. Fish. Rev. 1963, 25, 17–27. [Google Scholar]
- Meillat, M. Essais du chalut mésopélagos pour le programme MYCTO 3D—MAP de l’IRD, à bord du Marion Dufresne. IFREMER Internal. Rep. 2012. R.INT.RBE/STH/LTH 2012-05. [Google Scholar]
- Cotté, C.; Ariza, A.; Berne, A.; Habasque, J.; Lebourges-Dhaussy, A.; Roudaut, G.; Espinasse, B.; Hunt, B.P.V.; Pakhomov, E.A.; Henschke, N.; et al. Macrozooplankton and micronekton diversity and associated carbon vertical patterns and fluxes under distinct productive conditions around the Kerguelen Islands. J. Mar. Syst. 2022, 226, 103650. [Google Scholar] [CrossRef]
- Béhagle, N.; Cotté, C.; Lebourges-Dhaussy, A.; Roudaut, G.; Duhamel, G.; Brehmer, P.; Josse, E.; Cherel, Y. Acoustic distribution of discriminated micronektonic organisms from a bi-frequency processing: The case study of eastern Kerguelen oceanic waters. Prog. Oceanogr. 2017, 156, 276–289. [Google Scholar] [CrossRef]
- Olivar, M.P.; Castellón, A.; Sabatés, A.; Sarmiento-Lezcano, A.; Emelianov, M.; Bernal, A.; Yang, Y.; Proud, R.; Brierley, A.S. Variation in mesopelagic fish community composition and structure between Mediterranean and Atlantic waters around the Iberian Peninsula. Front. Mar. Sci. 2022, 9, 1028717. [Google Scholar] [CrossRef]
- Olivar, M.P.; Hulley, P.A.; Castellón, A.; Emelianov, M.; López, C.; Tuset, V.M.; Contreras, T.; Molí, B. Mesopelagic fishes across the tropical and equatorial Atlantic: Biogeographical and vertical patterns. Prog. Oceanogr. 2017, 151, 116–137. [Google Scholar] [CrossRef]
- Hernández-León, S.; Olivar, M.P.; de Puelles, M.L.F.; Bode, A.; Castellón, A.; López-Pérez, C.; Tuset, V.M.; González-Gordillo, J.I. Zooplankton and Micronekton Active Flux Across the Tropical and Subtropical Atlantic Ocean. Front. Mar. Sci. 2019, 6, 535. [Google Scholar] [CrossRef]
- López-Pérez, C.; Olivar, M.P.; Hulley, P.A.; Tuset, V.M. Length–weight relationships of mesopelagic fishes from the equatorial and tropical Atlantic waters: Influence of environment and body shape. J. Fish Biol. 2020, 96, 1388–1398. [Google Scholar] [CrossRef] [PubMed]
- Kaartvedt, S.; Staby, A.; Aksnes, D.L. Efficient trawl avoidance by mesopelagic fishes causes large underestimation of their biomass. Mar. Ecol. Prog. Ser. 2012, 456, 1–6. [Google Scholar] [CrossRef]
- Pearcy, W.G. Quantitative Assessment of the Vertical Distributions of Micronektonic Fishes with Opening/Closing Midwater Trawls. Biol. Oceanogr. 1983, 2, 289–310. [Google Scholar] [CrossRef]
- Nelson, J.S.; Grande, T.C.; Wilson, M.V.H. Fishes of the World, 5th ed.; John Wiley & Sons Inc: Hoboken, NJ, USA, 2016; p. 434. [Google Scholar]
- Peña, M.; Olivar, M.P.; Balbín, R.; López-Jurado, J.L.; Iglesias, M.; Miquel, J. Acoustic detection of mesopelagic fishes in scattering layers of the Balearic Sea (western Mediterranean). Can. J. Fish. Aquat. Sci. 2014, 71, 1186–1197. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey | RV | Region | Period | Depth (m) | Echosounder | N. Stn |
|---|---|---|---|---|---|---|
| MAFIA | Hesperides | Tropical and Equatorial Atlantic | April 2015 | 0–800 m | EK60 | 14 |
| Bathypelagic | Sarmiento de Gamboa | Northeastern Atlantic | May–June 2018 | 0–1800 m | EK60 | 12 |
| CONECTA | García del Cid | Western Mediterranean | July 2016 | - | 4 | |
| WINFISH | García del Cid | Northwestern Mediterranean | March 2017 | 0–200 | - | 10 |
| SUMMER | Sarmiento de Gamboa | Off Iberian Peninsula | October 2020 | 0–700 m | EK80 | 19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castellón, A.; Olivar, M.P. VERDA: A Multisampler Tool for Mesopelagic Nets. J. Mar. Sci. Eng. 2023, 11, 72. https://doi.org/10.3390/jmse11010072
Castellón A, Olivar MP. VERDA: A Multisampler Tool for Mesopelagic Nets. Journal of Marine Science and Engineering. 2023; 11(1):72. https://doi.org/10.3390/jmse11010072
Chicago/Turabian StyleCastellón, Arturo, and María Pilar Olivar. 2023. "VERDA: A Multisampler Tool for Mesopelagic Nets" Journal of Marine Science and Engineering 11, no. 1: 72. https://doi.org/10.3390/jmse11010072
APA StyleCastellón, A., & Olivar, M. P. (2023). VERDA: A Multisampler Tool for Mesopelagic Nets. Journal of Marine Science and Engineering, 11(1), 72. https://doi.org/10.3390/jmse11010072