Robust Real-Time Detection of Laparoscopic Instruments in Robot Surgery Using Convolutional Neural Networks with Motion Vector Prediction



Abstract
1. Introduction
2. Surgical Tool Detection
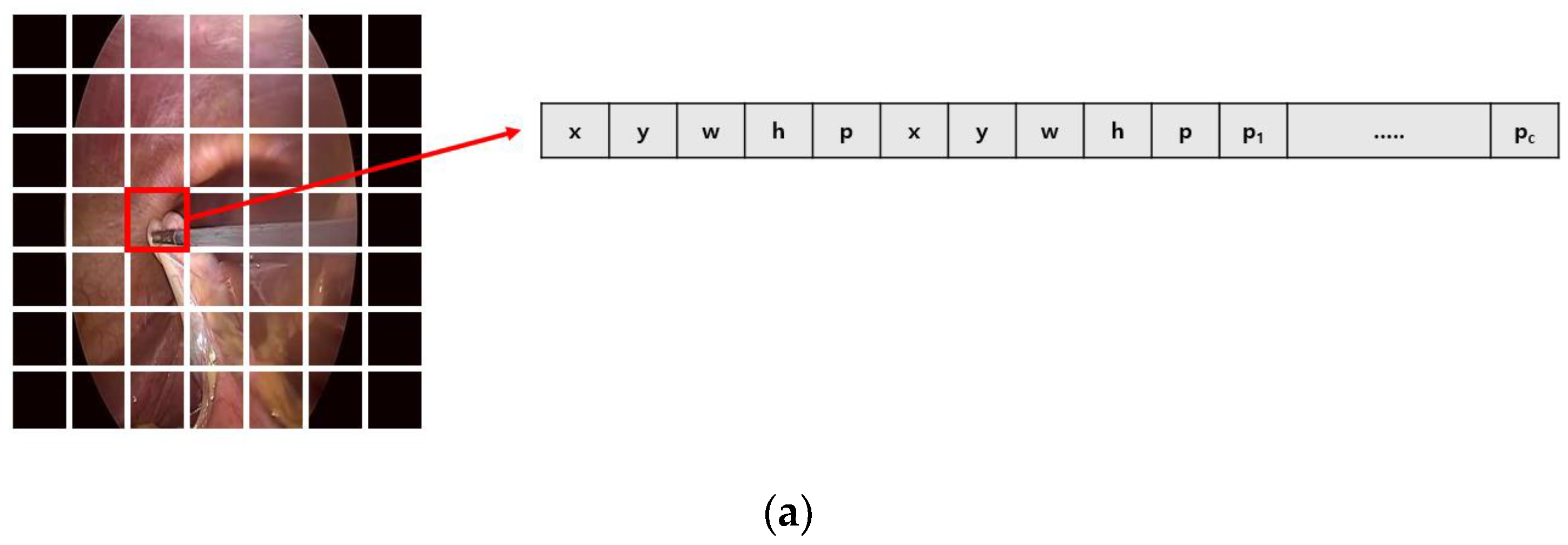
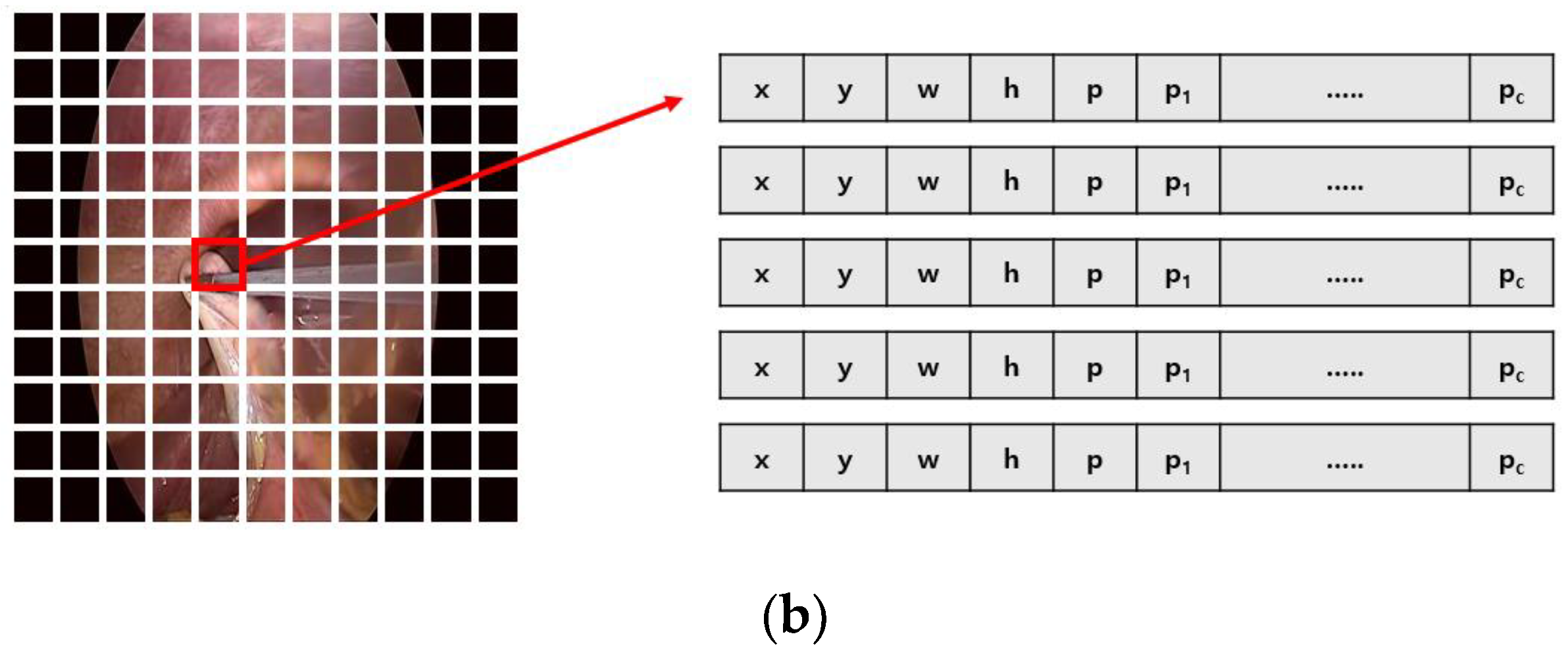
2.1. Detection with YOLO9000
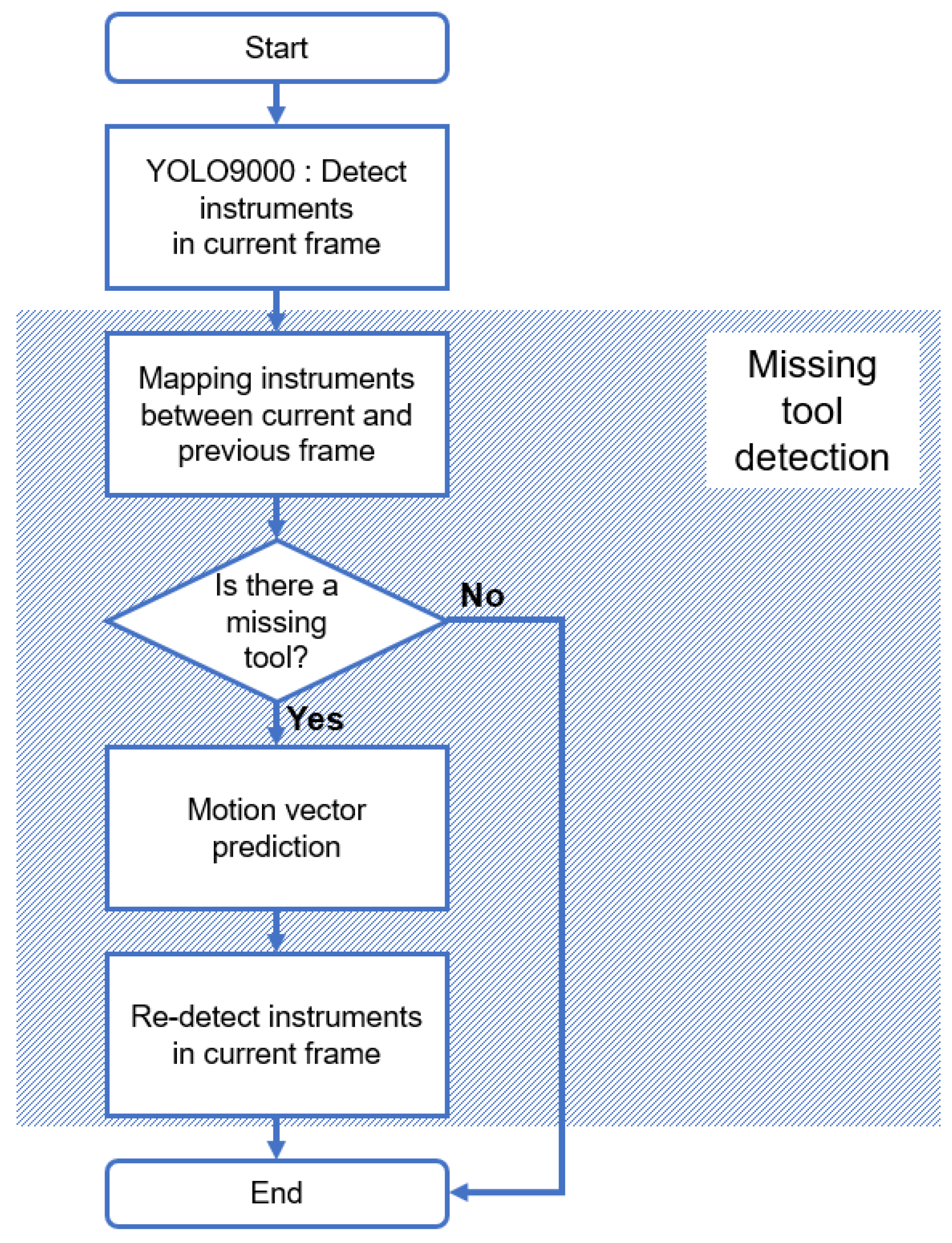
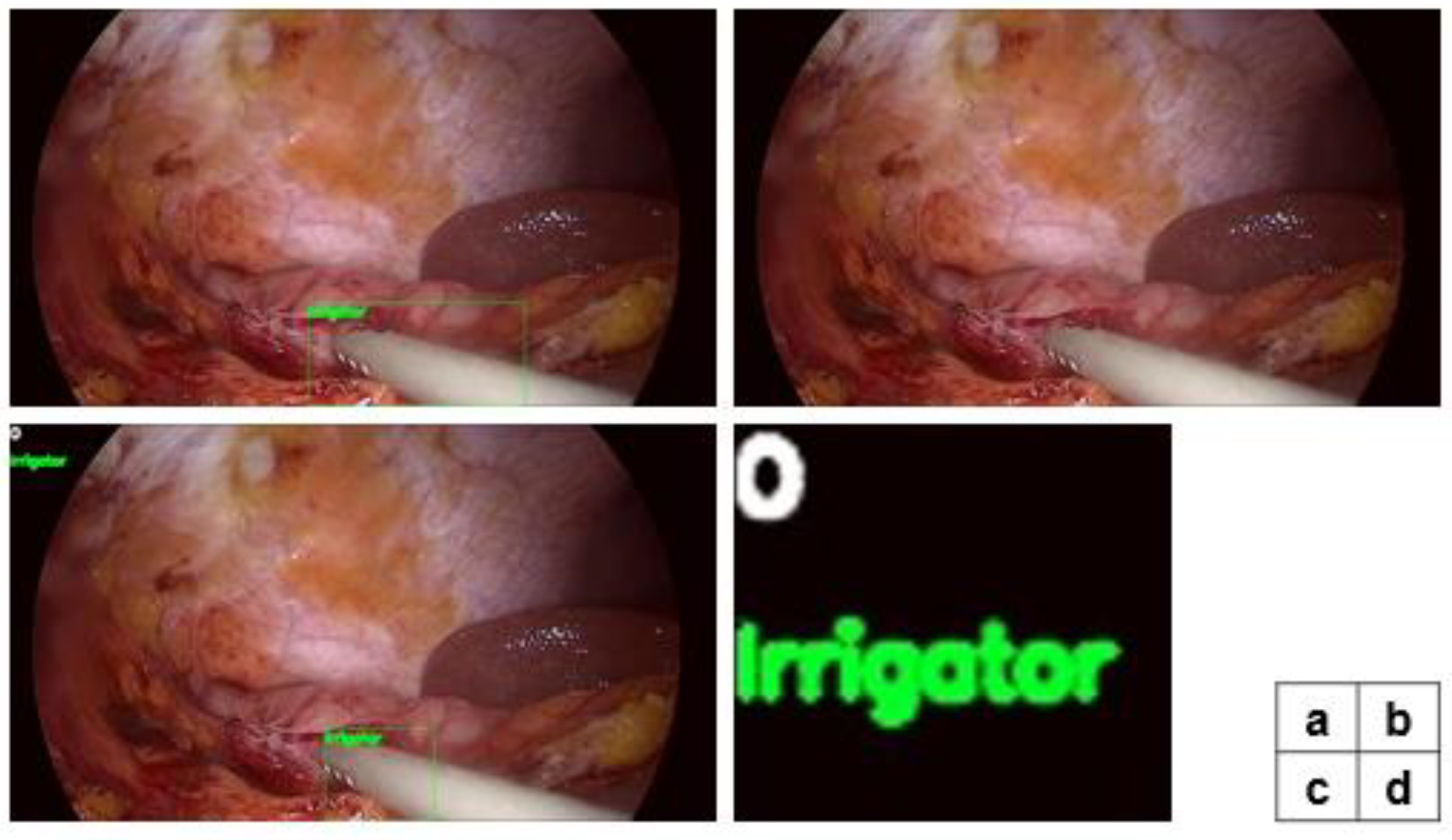
2.2. Missing Tool Detection with Motion Vector Prediction
3. Experimental Results and Error Analysis
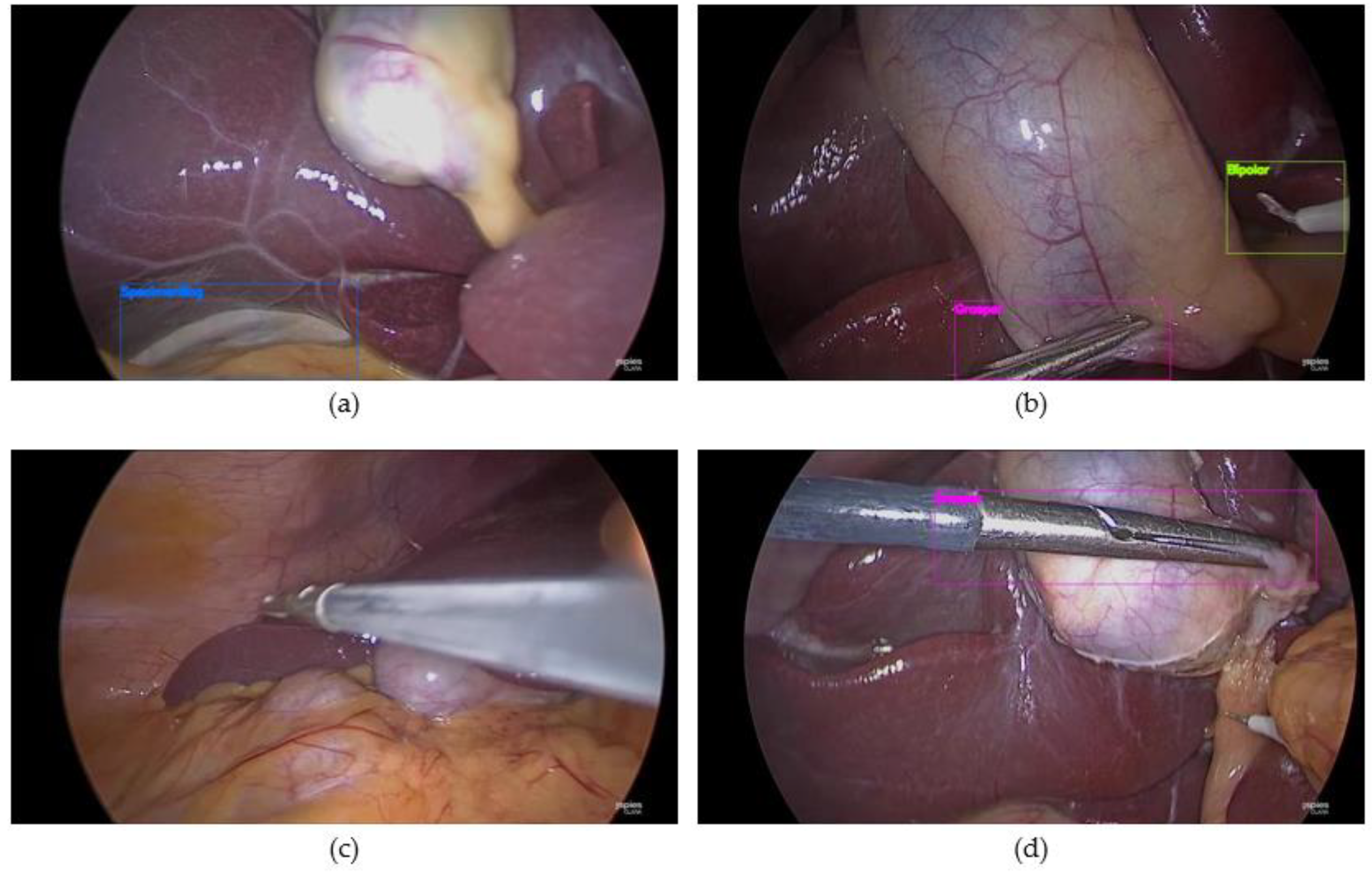
3.1. Experimental Conditions and Results
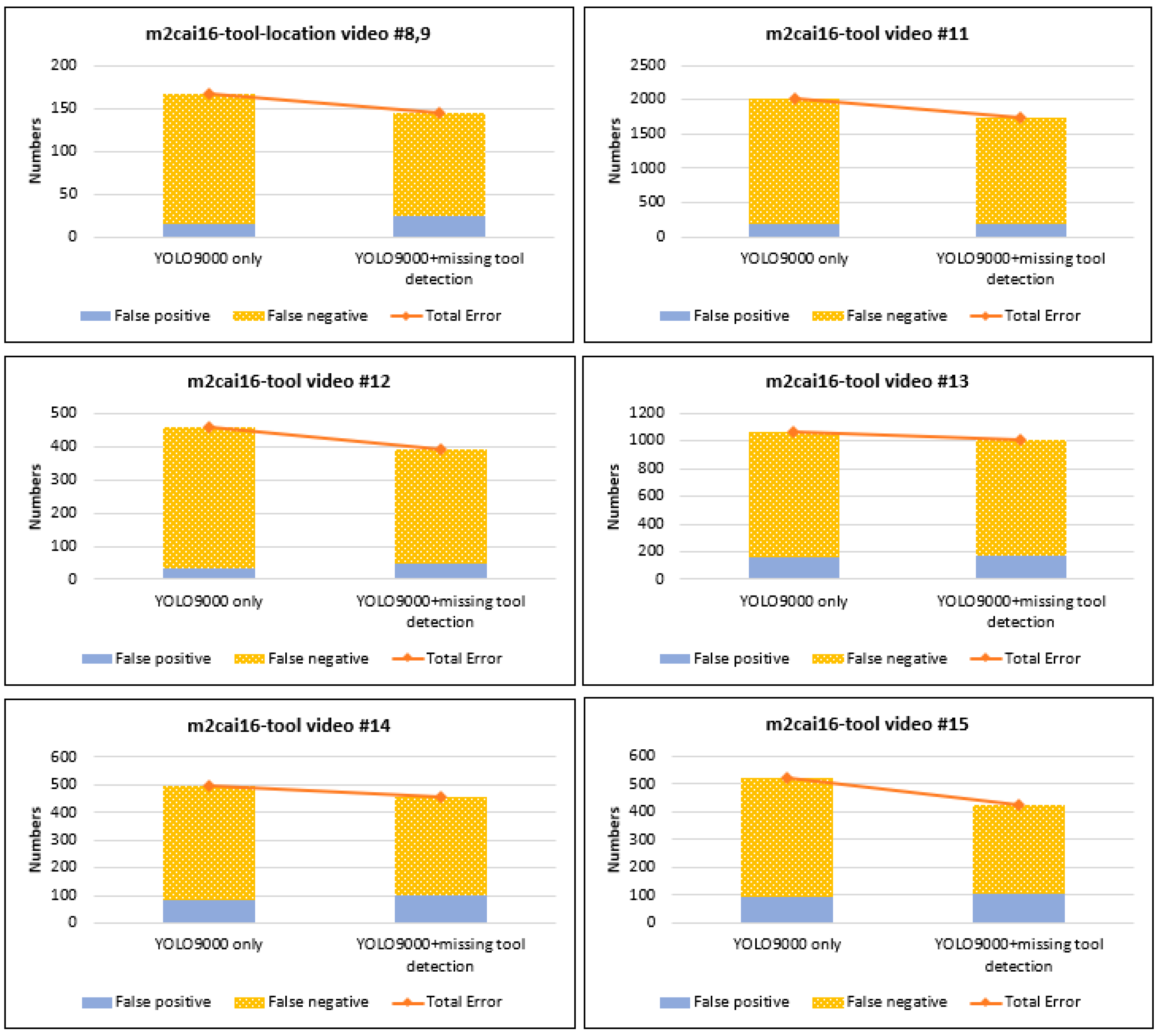
3.2. Error Analysis
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Weiser, T.G.; Regenbogen, S.E.; Thompson, K.D.; Haynes, A.B.; Lipsitz, S.R.; Berry, W.R.; Gawande, A.A. An estimation of the global volume of surgery: A modelling strategy based on available data. Lancet 2008, 372, 139–144. [Google Scholar] [CrossRef]
- Luo, J.; Yang, C.; Wang, N.; Wang, M. Enhanced teleoperation performance using hybrid control and virtual fixture. Int. J. Syst. Sci. 2019, 50, 451–462. [Google Scholar] [CrossRef]
- Luo, J.; Yang, C.; Su, H.; Liu, C. A Robot Learning Method with Physiological Interface for Teleoperation Systems. Appl. Sci. 2019, 9, 2099. [Google Scholar] [CrossRef]
- Luo, J.; Yang, C.; Li, Q.; Wang, M. A task learning mechanism for the telerobots. Int. J. Hum. Robot. 2019, 1950009. [Google Scholar] [CrossRef]
- Trehan, A.; Barnett-Vanes, A.; Carty, M.J.; McCulloch, P.; Maruthappu, M. The impact of feedback of intraoperative technical performance in surgery: A systematic review. BMJ Open 2015, 5, e006759. [Google Scholar] [CrossRef] [PubMed]
- Mansoorian, M.R.; Hosseiny, M.S.; Khosravan, S.; Alami, A.; Alaviani, M. Comparing the effects of objective structured assessment of technical skills (OSATS) and traditional method on learning of students. Nurs. Midwifery Stud. 2015, 4. [Google Scholar] [CrossRef] [PubMed]
- Vassiliou, M.C.; Feldman, L.S.; Andrew, C.G.; Bergman, S.; Leffondré, K.; Stanbridge, D.; Fried, G.M. A global assessment tool for evaluation of intraoperative laparoscopic skills. Am. J. Surg. 2005, 190, 107–113. [Google Scholar] [CrossRef] [PubMed]
- Van Empel, P.J.; van Rijssen, L.B.; Commandeur, J.P.; Verdam, M.G.; Huirne, J.A.; Scheele, F.; Meijerink, W.J. Objective versus subjective assessment of laparoscopic skill. ISRN Minim. Invasive Surg. 2013. [Google Scholar] [CrossRef]
- Bouget, D.; Allan, M.; Stoyanov, D.; Jannin, P. Vision-based and marker-less surgical tool detection and tracking: A review of the literature. Med. Image Anal. 2017, 35, 633–654. [Google Scholar] [CrossRef] [PubMed]
- Jo, K.; Choi, B.; Choi, S.; Moon, Y.; Choi, J. Automatic Detection of Hemorrhage and Surgical Instrument in Laparoscopic Surgery Image. In Proceedings of the 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 1260–1263. [Google Scholar]
- Cai, K.; Yang, R.; Lin, Q.; Wang, Z. Tracking multiple surgical instruments in a near-infrared optical system. Comput Assist. Surg. 2016, 21, 46–55. [Google Scholar] [CrossRef] [PubMed]
- Kranzfelder, M.; Schneider, A.; Fiolka, A.; Schwan, E.; Gillen, S.; Wilhelm, D.; Feussner, H. Real-time instrument detection in minimally invasive surgery using radiofrequency identification technology. J. Surg. Res. 2013, 185, 704–710. [Google Scholar] [CrossRef] [PubMed]
- Laina, I.; Rieke, N.; Rupprecht, C.; Vizcaíno, J.P.; Eslami, A.; Tombari, F.; Navab, N. Concurrent Segmentation and Localization for Tracking of Surgical Instruments. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Cham, Switzerland, 2017; pp. 664–672. [Google Scholar]
- Lee, C.; Wang, Y.F.; Uecker, D.R.; Wang, Y. Image Analysis for Automated Tracking in Robot-Assisted Endoscopic Surgery. In Proceedings of the 12th International Conference on Pattern Recognition, Jerusalem, Israel, 9–13 October 1994; pp. 88–92. [Google Scholar]
- Reiter, A.; Allen, P.K. An Online Learning Approach to In-Vivo Tracking Using Synergistic Features. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3441–3446. [Google Scholar]
- Bouget, D.; Benenson, R.; Omran, M.; Riffaud, L.; Schiele, B.; Jannin, P. Detecting surgical tools by modelling local appearance and global shape. IEEE Trans. Med. Imaging 2015, 34, 2603–2617. [Google Scholar] [CrossRef] [PubMed]
- Reiter, A.; Allen, P.K.; Zhao, T. Feature Classification For tracking Articulated Surgical Tools. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Berlin, Germany, 2012; pp. 592–600. [Google Scholar]
- Speidel, S.; Benzko, J.; Krappe, S.; Sudra, G.; Azad, P.; Müller-Stich, B.P.; Dillmann, R. Automatic Classification of Minimally Invasive Instruments Based on Endoscopic image Sequences. In Medical Imaging 2009: Visualization, Image-Guided Procedures, and Modeling; International Society for Optics and Photonics: Bellingham, WA, USA, 2009; p. 72610A. [Google Scholar]
- Twinanda, A.P.; Shehata, S.; Mutter, D.; Marescaux, J.; De Mathelin, M.; Padoy, N. A deep architecture for recognition tasks on laparoscopic videos. IEEE Trans. Med. Imaging 2016, 36, 86–97. [Google Scholar] [CrossRef]
- Sahu, M.; Mukhopadhyay, A.; Szengel, A.; Zachow, S. Tool and phase recognition using contextual CNN features. arXiv, 2016; arXiv:1610.08854. [Google Scholar]
- Raju, A.; Wang, S.; Huang, J. M2CAI Surgical tool Detection Challenge Report; Technical Report; University of Texas at Arlington: Arlington, TX, USA, 2016. [Google Scholar]
- Twinanda, A.P.; Mutter, D.; Marescaux, J.; de Mathelin, M.; Padoy, N. Single-and multi-task architectures for tool presence detection challenge at M2CAI 2016. arXiv 2016, arXiv:1610.08851. [Google Scholar]
- Tool Presence Detection Challenge Results. Available online: http://camma.u-strasbg.fr/m2cai2016/index.php/tool-presence-detection-challenge-results (accessed on 18 July 2019).
- Jin, A.; Yeung, S.; Jopling, J.; Krause, J.; Azagury, D.; Milstein, A.; Fei-Fei, L. Tool Detection and Operative Skill Assessment in Surgical Videos Using Region-Based Convolutional Neural Networks. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Tahoe, NV, USA, 12–15 March 2018; pp. 691–699. [Google Scholar]
- Bodenstedt, S.; Ohnemus, A.; Katic, D.; Wekerle, A.L.; Wagner, M.; Kenngott, H.; Speidel, S. Real-time image-based instrument classification for laparoscopic surgery. arXiv, 2018; arXiv:1808.00178. [Google Scholar]
- Shvets, A.A.; Rakhlin, A.; Kalinin, A.A.; Iglovikov, V.I. Automatic Instrument Segmentation in Robot-Assisted Surgery Using Deep Learning. In Proceedings of the 17th IEEE International Conference on Machine Learning and Applications (ICMLA), Orlando, FL, USA, 17–20 December 2018; pp. 624–628. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Maas, A.L.; Hannun, A.Y.; Ng, A.Y. Rectifier nonlinearities improve neural network acoustic models. Proc. Icml 2013, 30, 3. [Google Scholar]
- Redmon, J.; Farhadi, A. An incremental improvement. arXiv, 2018; arXiv:1804.02767. [Google Scholar]
- Available online: http://ai.stanford.edu/~syyeung/tooldetection.html (accessed on 3 July 2019).
- Available online: http://camma.u-strasbg.fr/m2cai2016/index.php/program-challenge (accessed on 3 July 2019).
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. In Proceedings of the 28th International Conference on Neural Information Processing Systems (NIPS’15), Montreal, QC, Canada, 7–12 Decembar 2015. [Google Scholar]
- Choi, B.; Jo, K.; Choi, S. Surgical-Tools Detection Based on Convolutional Neural Network in Laparoscopic Robot-Assisted Surgery. In Proceedings of the 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Jeju Island, Korea, 11–15 July 2017. [Google Scholar]
- Felzenszwalb, P.F.; Girshick, R.B.; McAllester, D.; Ramanan, D. Object detection with discriminatively trained part based models. Trans. PAMI 2010, 32, 1627–1645. [Google Scholar] [CrossRef] [PubMed]
- Sak, H.; Senior, A.; Beaufays, F. Long Short-Term Memory Recurrent Neural Network Architectures for Large Scale Acoustic Modeling. In Proceedings of the Fifteenth Annual Conference of the International Speech Communication Association, Singapore, 14–18 September 2014. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset (Video Number) | Training | Test |
|---|---|---|
| 1~7 (m2cai16-tool-locations) | 8~9 (m2cai16-tool-locations) 11~15 (m2cai16-tool) | |
| Grasper | 1344 | 6764 |
| Bipolar | 1351 | 502 |
| Hook | 913 | 7503 |
| Scissors | 832 | 210 |
| Clipper | 1106 | 357 |
| Irrigator | 1030 | 321 |
| SpecimenBag | 1505 | 560 |
| All tools | 8081 | 16,217 |
| Number of images | 7492 | 13,137 |
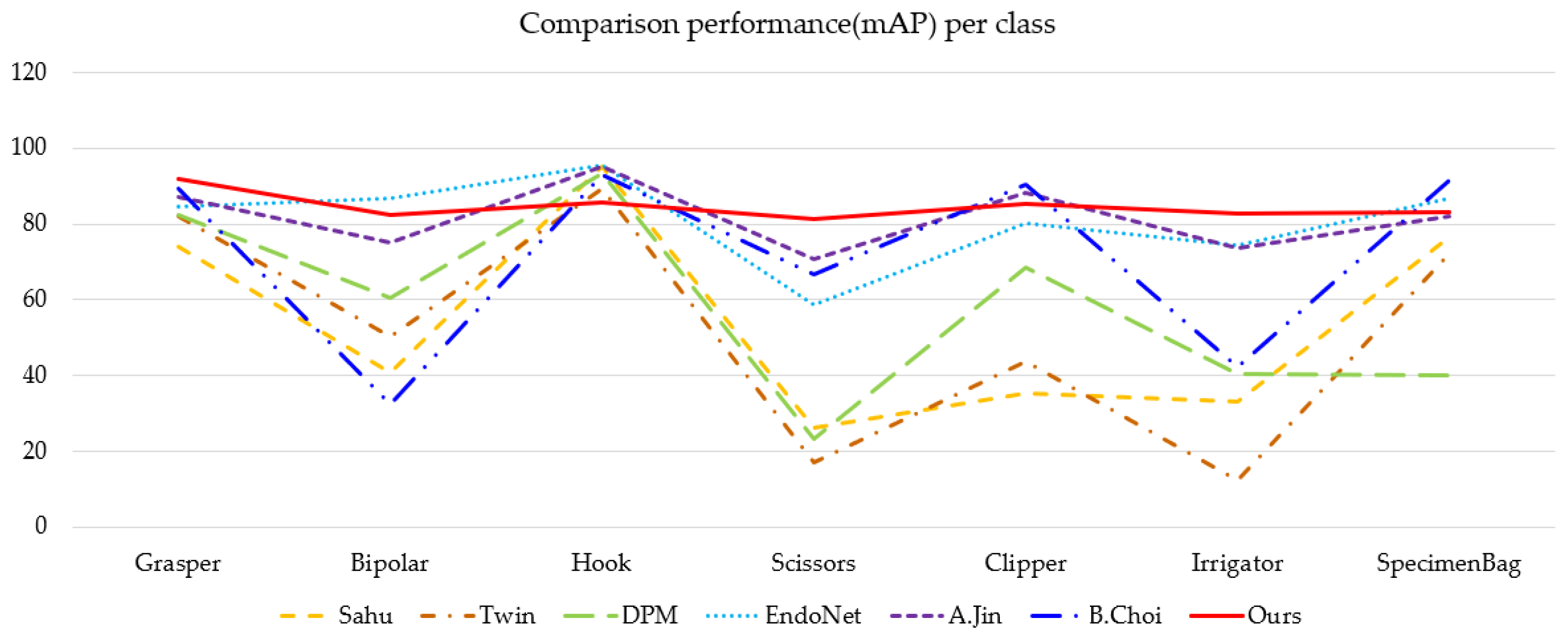
| Instrument Type | Raju [21] | Sahu [20] | Twin [22] | DPM [35] | EndoNet [19] | A.Jin [24] | B.Choi [34] | Proposed Algorithm |
|---|---|---|---|---|---|---|---|---|
| Grasper | NA | 73.9 | 82.2 | 82.3 | 84.8 | 87.2 | 89.3 | 92.1 |
| Bipolar | NA | 40.8 | 50.3 | 60.6 | 86.9 | 75.1 | 32.4 | 82.3 |
| Hook | NA | 95.1 | 89.4 | 93.4 | 95.6 | 95.3 | 93.2 | 85.9 |
| Scissors | NA | 26.2 | 17.0 | 23.4 | 58.6 | 70.8 | 66.6 | 81.2 |
| Clipper | NA | 35.3 | 43.6 | 68.4 | 80.1 | 88.4 | 90.3 | 85.3 |
| Irrigator | NA | 33.2 | 12.5 | 40.5 | 74.4 | 73.5 | 42.4 | 82.9 |
| SpecimenBag | NA | 76.6 | 72.2 | 40.0 | 86.8 | 82.1 | 91.4 | 83.2 |
| All tools | 63.8 | 54.5 | 52.5 | 58.4 | 81.0 | 81.8 | 72.26 | 84.7 |
| Algorithm | Bodenstedt [25] | EndoNet [19] | A. Jin [24] | Proposed Algorithm |
|---|---|---|---|---|
| Accuracy (mAP) | - | 81.0 | 81.8 | 84.7 |
| Accuracy (%) | 86.0 | - | - | 95.5 |
| Speed (FPS) | 22.2 | 5.0 | 5.0 | 38.0 |
| Proposed Method | Precision | Recall | F1 Score |
|---|---|---|---|
| Yolo9000 | 0.957 | 0.767 | 0.851 |
| Yolo9000 + Missing tool detection | 0.951 | 0.805 | 0.871 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jo, K.; Choi, Y.; Choi, J.; Chung, J.W. Robust Real-Time Detection of Laparoscopic Instruments in Robot Surgery Using Convolutional Neural Networks with Motion Vector Prediction. Appl. Sci. 2019, 9, 2865. https://doi.org/10.3390/app9142865
Jo K, Choi Y, Choi J, Chung JW. Robust Real-Time Detection of Laparoscopic Instruments in Robot Surgery Using Convolutional Neural Networks with Motion Vector Prediction. Applied Sciences. 2019; 9(14):2865. https://doi.org/10.3390/app9142865
Chicago/Turabian StyleJo, Kyungmin, Yuna Choi, Jaesoon Choi, and Jong Woo Chung. 2019. "Robust Real-Time Detection of Laparoscopic Instruments in Robot Surgery Using Convolutional Neural Networks with Motion Vector Prediction" Applied Sciences 9, no. 14: 2865. https://doi.org/10.3390/app9142865
APA StyleJo, K., Choi, Y., Choi, J., & Chung, J. W. (2019). Robust Real-Time Detection of Laparoscopic Instruments in Robot Surgery Using Convolutional Neural Networks with Motion Vector Prediction. Applied Sciences, 9(14), 2865. https://doi.org/10.3390/app9142865